
INTELLIGENT HOTEL ROOM ASSISTANT
Balázs Tusor
Integrated Intelligent Systems Japanese-Hungarian Laboratory, Budapest, Hungary
Annamária R. Várkonyi-Kóczy
Institute of Mechatronics and Vehicle Engineering, Óbuda University, Budapest, Hungary
Keywords: Intelligent space, Virtual room application, Machine learning, Smart environments.
Abstract: Recently, the usage of smart environment systems has become popular, in order to make everyday living
more comfortable and to improve the quality of human life. Intelligent Space (or iSpace) based systems are
good examples: they strive to be comfortable and easy to use, even without demanding technical knowledge
from their users. However, their aim is not limited to this: in fact, their ultimate goal is to achieve an
intelligent environment for higher quality, natural and easy to follow lifestyle. The goal of this paper is to
present a research that focuses on developing an Intelligent Space application that is able to comprehend,
interpret and execute the detected and pre-processed commands given by human users. The presented
solution is also able to learn commands that are given periodically under specific conditions and execute
them if the conditions occur.
1 INTRODUCTION
Today, computers play an increasing role in our
everyday life. The applications of intelligent systems
that aim to improve the living conditions and quality
of everyday life are also gaining more and more
importance. In ideal case, these systems are realized
in such a way that the usage of the systems becomes
as easy as possible, while the presence of the system
does not bother its user at all. This leads to the basic
idea of “ubiquitous computing”, proposed by
(Weiser, 1991).
One example for ubiquitous computing
applications is the Intelligent Space (iSpace) (Lee et
al., 2000), which has been developed at the
University of Tokyo. ISpace is a room or area that
has built-in intelligence: it can monitor the events
and actions taking place in the room or area, it can
comprehend human interactions, and it is able to
react to them. To mention some examples, it can
share information with the user, help in orientation,
or anticipate crisis situations. The user can also give
commands to the Intelligent Space to use certain
services. Therefore, the system should be easy to use
for the people in it, without the need for them to
learn how the system is to be used.
The most characteristic feature of the iSpace is
that the intelligence is distributed in the whole space,
not in the individual agents. The main advantages of
this component based architecture are that the iSpace
can easily be constructed or modified by the
installation or replacement of so-called Distributed
Intelligent Networked Devices (DINDs) responsible
for monitoring a part of the space, processing the
sensed data, making local decisions, and
communicating with other DINDs or agents if
necessary. The agents in the space do not have to
possess any complex logic.
Any room or area can be converted to an
Intelligent Space by installing DINDs into it.
Although, when building iSpace into an existing
area we have to keep in view that the system should
be human centered, should not be disturbing for the
people who are using it and the installation should
not alter the area overly.
There are several iSpace applications currently
developed or planned. These include the positioning
and tracking of humans, the localization of mobile
robots, the control of robots, finding paths for them
by using itineraries taken by people, etc. (see e.g.
(Lee and Hashimoto, 2000), (Appenzeller et al.,
1997), and (Lee et al., 2004)).
182
Tusor B. and R. Várkonyi-Kóczy A..
INTELLIGENT HOTEL ROOM ASSISTANT.
DOI: 10.5220/0003573101820187
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2011), pages 182-187
ISBN: 978-989-8425-74-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
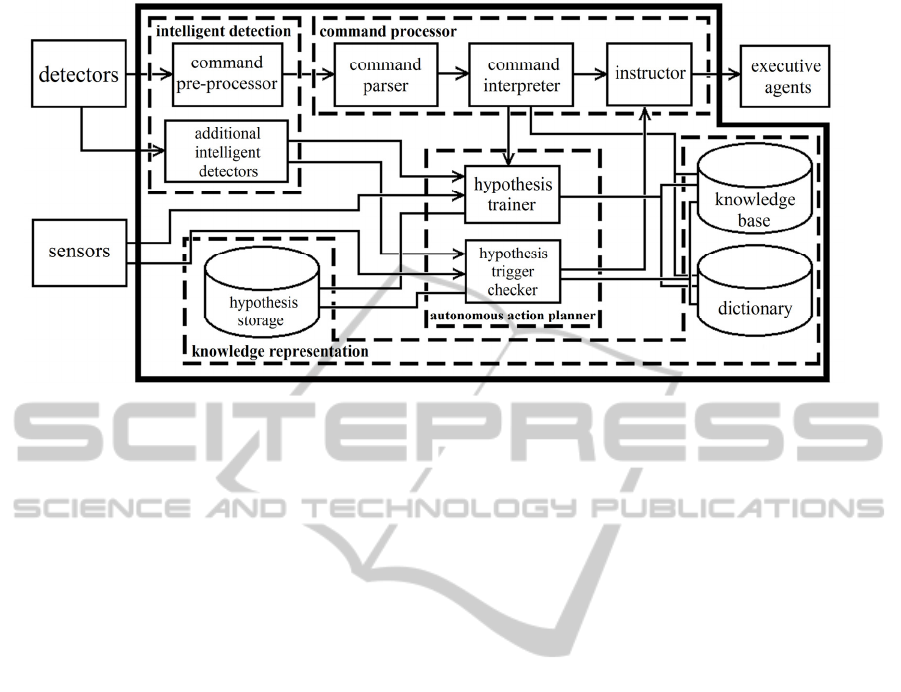
Figure 1: The architecture of the system.
In this paper, the authors focus on a different
approach fitting into the frame of the iSpace. This
application covers learning and satisfying varying
daily routine actions of different people. A typical
example can be an intelligent hotel room assistant
that provides services to make the daily life of the
people inhabiting the room more comfortable.
To achieve this goal, several problems need to
be solved. First, the knowledge has to be
represented in a flexible and easy to process way.
Secondly, the commands given by users need to be
detected. Thirdly, the detected commands need to
be processed and executed. Lastly, frequently
repeated commands need to be learned and
executed autonomously. Thus, the system can be
divided to 4 major parts; each part solves one of
the problems mentioned above.
The rest of the paper is organized as follows: In
section 2 the authors present an overview of the
proposed system. Section 3 gives more specific
descriptions about the modules of the system. In
section 4 the current implementation of the system
is presented. Section 5 draws the conclusions about
the current state of the system and presents ideas
for future work.
2 THE INTELLIGENT HOTEL
ROOM ASSISTANT
Figure 1 shows the architecture of the system. The
inputs for the system are provided by detectors and
sensors. Former are devices which are capable of
detecting audio or visual commands given by
human users, latter are simple devices which can
measure simple properties of the room, like its
temperature.
Executive agents are electric devices that are able
to satisfy the needs of the user. They have just enough
built-in intelligence to be able to do their pre-defined
task. The iSpace is connected to them as well.
The system consists of 4 parts. The first major part
is Knowledge Representation, which defines the way
how knowledge is described and stored in the system.
The second major part is Intelligent Detection part,
which detects the command given by human users and
prepares it. It also detects additional information. This
part is designed to be added or be replaced by a new
module easily. The third part is the Command
Processor part. It processes the command and orders
the appropriate executing agents to carry it out. The
last part is the Autonomous Action Planner, which is
responsible for the learning and trigger-based
autonomous actions of the system.
3 THE MAJOR PARTS
OF THE SYSTEM
3.1 Knowledge Representation
The knowledge representation part consists of the
knowledge base, the hypothesis storage and at least
one dictionary.
The knowledge base represents the knowledge of
the system. It is realised as a graph-based structure,
where the nodes denote the known abstract objects
and concepts. The directed edges between them
describe their relationship.
INTELLIGENT HOTEL ROOM ASSISTANT
183
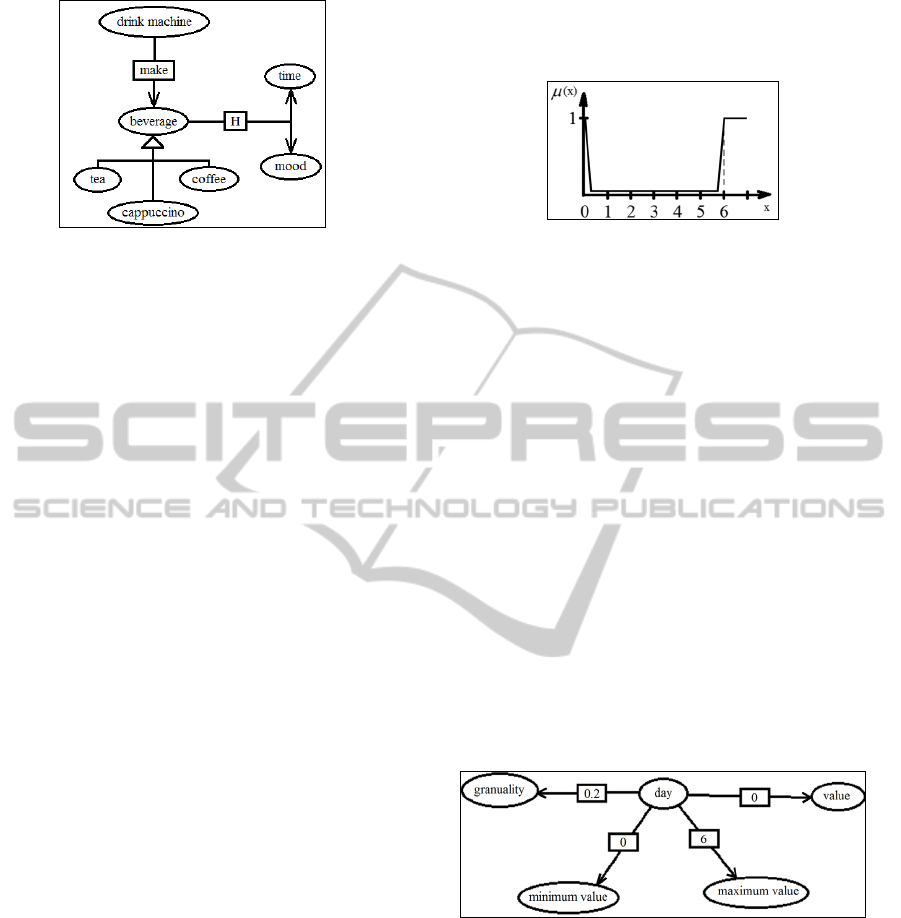
Figure 2: Structural example for the knowledge
representation in the knowledge base.
The nodes are homogenous and nameless. For
the sake of identification dictionaries are used,
which assign words or expressions to nodes. In the
current implementation only one (English)
dictionary is used, although the concept is
designed for the usage of multiple dictionaries.
This way the knowledge base can be kept
independent of natural languages.
The different types of edges are the following:
Ability Edges: node A is connected to node B
with label s, if A can do s to B. For example,
A = „drink machine”, B = „beverages”,
s = „make” means „drink machine can make
beverages”. In figure 2 it is denoted with its s
label.
Instance Edges: an instance edge assigns the
address of an executive agent to node A. For
example, A = „drink machine” and the
assigned address is the address of the drink
machine. This is a flexible way to bind an
executive agent to the node that describes it.
Meta Edges: node A is connected to node B,
if A has a numerical value in B quality. For
example, A = „temperature”, B = „value” and
the value is „20” (which means „the value of
the temperature is 20”). Another example, to
describe that the minimum value of the
temperature is 0: B = „minimum value” and
the value is „0”. With the application of meta
edges environmental variables can be
appointed, which can store the values of the
sensors connected to the iSpace.
Heuristics Edges: node A is connected to
node B, if B heuristics can be bound to
concept A. B is usually an environmental
variable. For example, actions done to
„curtain” are dependent of „time”. It is
denoted by an arrow with label H.
Inheritance Edges: node A is connected to
node B, if A is a B. For example, “coffee is a
beverage”. A inherits the properties of B: for
example, the heuristics and ability edges
connected to B. It is denoted by a triangle headed
arrow.
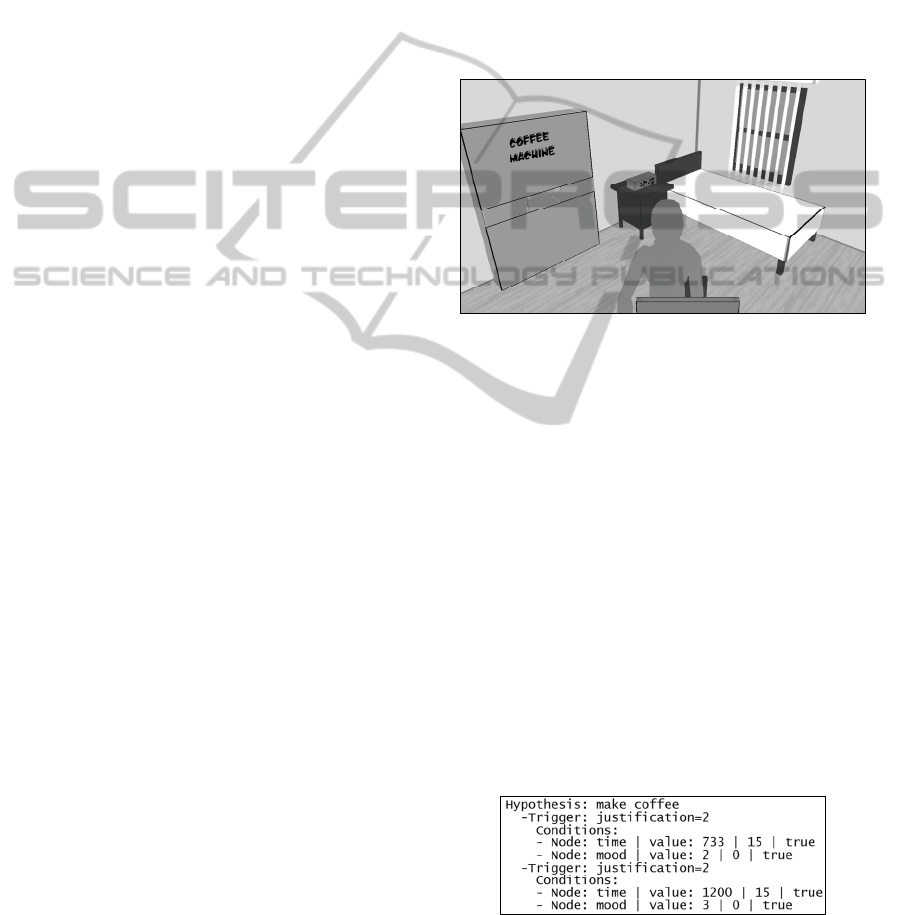
Figure 3: The fuzzy membership function for Saturday.
Fuzzy Edges: similar to meta edges, but with
fuzzy sets instead of numerical values. For
example, A = „Saturday”, B = „day” and the
assigned value is given by the membership
function that can be seen on figure 3, for input
value x. (x = 0..6, assuming the days of the week
start with Sunday (with index 0)).
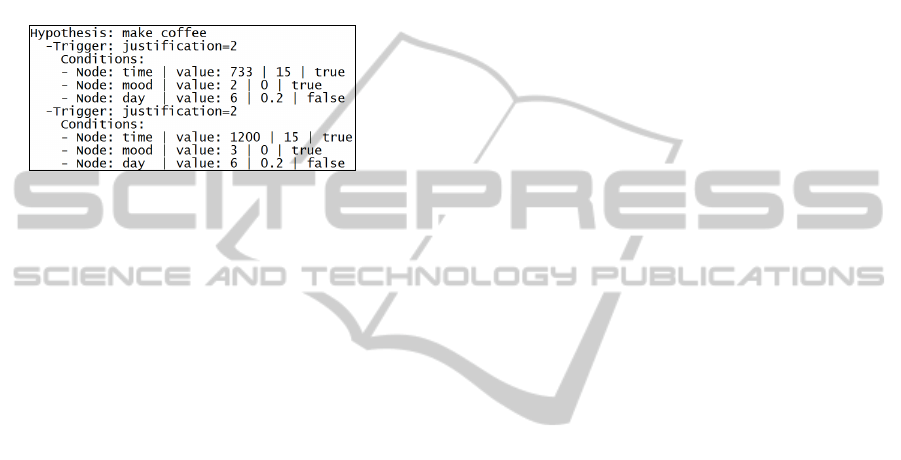
Figure 2 shows a structural example for the
realization of the knowledge base and figure 4 shows
an example for the application of meta edges. The
meta edges connecting nodes minimum value and
maximum value to node day store the possible
minimum and maximum value of the day
environmental variable, the edge between node value
and node day stores the current value of the
parameter, similarly; while the edge between nodes
granularity and day stores a value that remarks how
sensitive the variable is to change.
These 4 nodes are connected to specific nodes like
mood and time, similarly with the appropriate values,
thus making them environmental variables.
Figure 4: The application of meta edges.
The system creates and manages hypotheses based
on the interpreted commands given by the user. The
hypotheses are stored in the hypothesis storage. A
hypothesis consists of (pointers to) the action and
subject nodes. It also can have optional numerical
values, similarly to the command the hypothesis is
based on. A hypothesis also has at least one trigger,
which consists of a justification value that denotes
how reassured the system is in the trigger of the
hypothesis; and at least one condition. A condition is
derived from an environmental variable: it consists of
a condition node (the node of the environmental
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
184

variable), value (the value stored in the meta edge
connecting the environmental variable to node
„value”), sensitivity (which can be derived
similarly to value using node „granularity” and the
appropriate meta edge), and affirmativeness, which
is a Boolean value. If its value is false then the
condition is used as if it would be negated. (Thus
the trigger will be triggered only if the condition is
not fulfilled.)
3.2 Intelligent Detection
The Intelligent Detection part consists of
Command Pre-Processor (CPP) modules and
Additional Intelligent Detector (AID) modules.
The task of the CPP modules is to detect the
command given by human users and transform it
into a whole sentence (for example, “open the
window”). The methods used to achieve this
depend on the type of the available detectors. For
example, for voice commands microphones are
required, and to be able to give command to the
iSpace via hand gestures (so users suffering from
hearing impairment or muteness can communicate
with the system as well via sign language) one or
more cameras are necessary. For the latter case, the
hand gesture detection and recognition system
proposed by (Várkonyi-Kóczy et al., 2010)can be used.
The task of the AID modules is to provide
additional information to the system, like
estimating the emotional state of the human users.
3.3 Command Processor
The modules of the Command Processor analyze
the given command and order the appropriate
executive agents to carry it out. These modules are
the Command Parser Module, the Command
Interpreter Module and the Instructor Module.
3.3.1 Command Parser Module (CPM)
The task of the CPM is to determine the type of the
command and parse it with regards to its type. Its
input is the pre-processed command in the form of
a whole sentence and its output is the parsed
command.
Two different types of commands are
distinguished: instructions and prohibitions.
Instructions are simple commands, which are
given by the user to achieve change in the
environment. The first part of instructions
describes the action that is needed to be executed,
while the second part describes the subject of the
action. After that there can be optional numerical
values.
Prohibitions are commands that are given by the
user to bound one or more commands that were
already learned, thus achieving change in the
hypotheses. Their structure is similar to instructions,
with the difference that they start with DO NOT and
have additional (at least one) text parameters, which
represent fuzzy sets. For example, in case of „DO
NOT make coffee on Saturday” prohibition command
„Saturday” means the fuzzy membership function that
can be seen in figure 3 (the input value can be
retrieved from the meta edge connecting nodes value
and day). Since the granularity of Saturday is 0.2,
early Sunday morning and late Friday night count as
“almost Saturday”.
Since the input is a whole sentence in predefined
format (since English language is quite strictly
defined), the parsing algorithm is simple. For
example, in case of instructions the first word is
always the action and (after the removal of occurrent
articles, like “the”) the second one is the subject of the
command.
3.3.2 Command Interpreter Module (CIM)
The task of the CIM is to determine which executive
agent can execute the command. Its input is the parsed
command and its output is the address/reference of an
executive agent.
The algorithm of the command interpretation is
applied only if the command is an instruction, since
prohibitions are not needed to be executed. First the
algorithm needs to find the node corresponding to the
subject of the command, with the usage of the
dictionary. Then if there is such node, the next step is
to find out what can do the action of the command to
the previously found node. This is done by searching
among the action edges. If there is one and it has an
instance (there is an instance edge to it), then the
algorithm has found the executive agent that can
execute the command. If there is none (or there is, but
it does not have any instances) then the algorithm
looks at the ancestors of the subject node (via
inheritance edges), recursively searching for an
ancestor with at least one instance. If there is at least
one, then the algorithm returns the address/reference
of the executive agent bound to that ancestor.
Otherwise, the command cannot be executed.
3.3.3 Instructor Module
The task of the Instructor Module is to instruct the
executive agents chosen by the interpreter to execute
the task to provide the desired service for the user.
INTELLIGENT HOTEL ROOM ASSISTANT
185
3.4 Autonomous Action Planner (AAP)
The AAP is responsible for the learning of the
system via hypotheses and to decide whether or
not to take actions according to what the system
has learned. It consists of the Hypothesis Trainer
and the Hypothesis Trigger Checker modules.
3.4.1 Hypothesis Trainer Module (HTM)
The task of the HTM is to determine which
executive agent can execute the command. Its
input is the parsed command and has no outputs.
The algorithm of the hypothesis training is the
following:
If the command is an instruction, then search
for a hypothesis that has the same action, subject
and numerical parameters. Since there can be only
one hypothesis like that, it is sufficient to get that
one. If there is none, then make a new hypothesis
using the parameters of the command and add a
new trigger and new conditions with the
(environmental variable) nodes connected to the
subject node with heuristic edges. There will be as
many conditions as many heuristic edges are
connected to the subject node. The value and
granularity of each condition is derived from the
current value and granularity of the environmental
variable. If there already is such a hypothesis, then
check its triggers. If there are any triggers with
conditions triggered by the current values of the
environmental variables, increase the justification
of that trigger and end the algorithm. If there is no
trigger like that, then make a new trigger using
heuristics just like it is explained above.
If the command is a prohibition then search for
a corresponding hypothesis with triggers. If there
is one (if it doesn’t have any triggers, add a new
trigger to it), then add a new condition to all its
triggers using the negated fuzzy membership
function of the prohibition. An example will be
shown for this in section 4.
3.4.2 Hypothesis Trigger Checker Module
(HTCM)
The task of the HTCM is to frequently check the
conditions of the hypotheses in the hypothesis
storage. If a hypothesis is triggered, the HTCM
sends the command of the hypothesis to the CIM,
which instructs the appropriate executive agents to
carry out the command.
4 THE IMPLEMENTED SYSTEM
In the current implementation (shown in figure 5)
the system is realised in a virtual room where a virtual
man is living his everyday life. He gives commands to
the Intelligent Hotel Room Assistant integrated to the
room to have his desires satisfied. The system is
equipped with detectors that can detect the given
command. It also has an emotion estimator as an
additional intelligent detector (which is still under
development; in the current implementation it is
assumed that it correctly estimates the mood of the
human user).
Figure 5: The current implementation of the virtual room.
He gives certain commands in certain times (for
example, „open the curtains” after he woke up at 7:00,
„make coffee” at 7:33 and 12:00, „turn on the
heating” if the temperature is lower than
15 °C / 59 °F, etc.), the system makes and manages
hypotheses based on these commands. The
justification threshold of the triggers of hypotheses is
set to 2, thus the system is only able to give out the
command of the triggered hypotheses if the command
was detected at least 2 times under the same
circumstances.
Figure 6 shows an example for a learned
hypothesis based on the instruction „make coffee”.
The command was given at 7:33 and 12:00 (the
parameters after „value” are: the value and granularity
of the environmental variable and the affirmativeness
of the condition). (The mood of the user was
frustrated (2) and neutral (3)).
Figure 6: Example for the instruction command.
His weekday and weekend schedules are different,
though the system does not know about this on the
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
186
first time, so it makes coffee at 7:33 on Saturday.
In reaction the user gives a prohibition: “DO NOT
make coffee on Saturday.”
Thus, the hypothesis based on command „make
coffee” is modified by the complement of fuzzy
membership function Saturday as it is shown in
figure 7, which means the system will not make
coffee if the value of environmental variable day is
6. (If the user decides after that he wants to drink
coffee after all on Saturday, the system will add a
brand new trigger to the hypothesis.)
Figure 7: Example for the prohibition command.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, an Intelligent Space application is
presented that is able to comprehend, interpret and
execute the detected and pre-processed commands
given by the human user, if the commands are
given in a specific form. The system is able to
learn repetitive commands that are given in similar
conditions with the usage of heuristics and execute
them when the conditions are fulfilled without
requiring the user to give those commands again.
During the simulations of the current
implementation the system could learn all the
instruction and prohibition commands given by the
virtual inhabitant of the virtual room.
The system is able to operate real-time because
of the graph-based knowledge base which can be
expanded and modified dynamically, thus new
sensors and executive agents can be added to the
system any time. The system is still under
development, there are numerous ways to improve
the capability and efficiency of the system.
Complete language independency: The
language independency is not complete in the
current implementation because of the text
parameter of the ability edges. However,
appointing nodes for the actions (and binding
words to them by the dictionary) and converting
the ability edges to three-ended-connections,
complete language independency can be achieved.
More flexible command parsing: in the current
implementation the command given by the user
needs to be in a predefined form, thus the user is
limited in giving commands. This limitation needs to
be decreased with the application of more intelligent
parser algorithms.
Causality: the system should realize the indirect
desires of the human user. For example, if the user
says that he or she is cold, then the system should
realize that the correct course of action is to close the
windows if they are open, turn on the heating, etc. To
achieve this, the improvement of the Knowledge Base
and Interpreter Module will be necessary.
Interaction between the iSpace and the human
user: if the system is unsure about giving out a learned
command (the justification value of the trigger of the
hypothesis is just at the threshold) or there are two
very similar hypothesis triggered at the same time
(e.g. „make coffee!” and „make tea!”), the system
should ask the human user about what actions should
it take.
These improvements will be applied to the system
in future work.
ACKNOWLEDGEMENTS
This work was sponsored by the Hungarian National
Scientific Fund (OTKA 78576).
REFERENCES
Appenzeller, G., J.-H. Lee, H. Hashimoto, 1997. “Building
topological maps by looking at people: An example of
cooperation between Intelligent Spaces and robots,”
Intelligent Robots and Systems, Vol. 3, No. 7, pp. 1326 –
1333. 1997.
Lee, J-H., H. Hashimoto, 2000. “Intelligent Space,” in Proc.
Int. Conf. on Intelligent Robots and Systems, IROS 2000,
Vol. 2, pp. 1358 – 1363.
Lee, J-H., K. Morioka, N. Ando, H. Hashimoto, 2004.
“Cooperation of distributed intelligent sensors in
intelligent environment,” IEEE/ASME Trans. on
Mechatronics, Vol. 9, No. 3, 2004
Várkonyi-Kóczy, A. R., B. Tusor, 2010, Circular Fuzzy
Neural Network Based Hand Gesture and Posture
Modeling, In CD-ROM Proc. of the 2010 IEEE Int.
Instrumentation and Measurement Technology Conf.,
I
2
MTC’2010, Austin, USA, May 3-6, 2010, pp. 815-
820.
Weiser, M., 1991. “The Computer for the twenty-first
century,” Scientific American, pp. 94-104, 1991.
INTELLIGENT HOTEL ROOM ASSISTANT
187
