
FUZZY APPROACHES FOR MODELING DYNAMICAL
ECOLOGICAL SYSTEMS
Àngela Nebot
1
, Francisco Mugica
1
, Benjamín Martínez-López
2
and Carlos Gay
2
1
Soft Computing Group, Universitat Politècnica de Catalunya, Jordi Girona Salgado 1-3, Barcelona, Spain
2
Centro de Ciencias de la Atmósfera, Universidad Nacional Autónoma de México, Circuito Exterior s/n
Ciudad Universitaria, Del. Coyoacán, 04510, Mexico
Keywords: Fuzzy logic, Soft computing, Global temperature change, Neuro-fuzzy systems, Genetic-fuzzy systems,
FIR.
Abstract: This research shows the usefulness of fuzzy logic approaches for modelling and simulation of complex
dynamical systems. Several hybrid soft computing methodologies based on fuzzy logic, such are neuro-
fuzzy systems, genetic-fuzzy systems and the Fuzzy Inductive Reasoning are applied to a real dynamical
system in the ecological domain, i.e. the global temperature change. The ocean-atmosphere system is
represented in this work by using an energy balance model that reproduces a range of temperatures increase
that agrees with that reported by the IPCC. The results obtained by all the fuzzy approaches studied are
good, although the Fuzzy Inductive Reasoning methodology performs clearly much better that the other
approaches for the application studied from the prediction accuracy point of view.
1 INTRODUCTION
The global climate is a highly complex system in
which take place many physical, chemical, and
biological processes, in a wide range of space and
time scales. These processes are simulated by global
circulation models, which are computer models
based on the fundamental laws of physics and they
are the principal tool for predicting the response of
the climate to increases in greenhouse gases. With
the increase of computational resources, complex
global models are frequently being used to assess the
response of the climate system to the projected
increase in the amount of greenhouse gases. All
model experiments point to global warming through
the coming centuries. These models, however, are
not perfect representations of reality because, among
other reasons, they do not include important physical
processes (e.g. ocean eddies, gravity waves,
atmospheric convection, clouds and small-scale
turbulence) that are known to be key aspects of the
climate system but that are too small or fast to be
explicitly modelled (Williams, 2005). In addition,
the high complexity of the climate system
represents, by itself, a crucial constraint in the
prediction of future climate change. Therefore, even
the most complex climate models are unable to
project how climate will change with certainty, as it
is reflected in the wide range of temperature increase
reported by the IPCC 4AR (IPCC, 2007).
Simple models of the climate system have been
developed and used to gain physical insight into
major features of the behaviour of the climate
system. These simple models have also been
frequently used to conduct sensitivity studies and to
produce climate projections for a range of
assumptions about emissions of carbon dioxide and
other greenhouse gases.
Fuzzy logic is a very powerful approach for
managing uncertainties inherent to complex systems.
Fuzzy systems have demonstrated their ability to
solve different kind of problems like control (e.g.
Watanabe et al., 2005) and have been successfully
applied to a wide range of applications, i.e. signal
and image processing (Bloch, 2005) and medical
applications (Nebot et al., 2003), etc. To the authors’
knowledge, there are very few studies that apply
fuzzy logic approaches to study the global
temperature change problem.
In the next section, we use a simple box model of
the ocean-atmosphere to assess the response of the
global mean temperature to changes in the thermal
forcing and to model parameters. This model
depends on a small number of parameters which are
374
Nebot À., Mugica F., Martínez-López B. and Gay C..
FUZZY APPROACHES FOR MODELING DYNAMICAL ECOLOGICAL SYSTEMS.
DOI: 10.5220/0003614603740379
In Proceedings of 1st International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2011), pages
374-379
ISBN: 978-989-8425-78-2
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

treated directly as fuzzy logic sets. Section 3
describes shortly the hybrid fuzzy methods studied
and presents the results. Section 4 presents a
comparison table of the different methodologies
performances and discusses the results. Finally the
conclusions of this work are given.
2 GLOBAL TEMPERATURE
CHANGE EXPERIMENT
In this section, we use a box model of the ocean-
atmosphere to determine whether this simple model
is able to reproduce the wide range of temperature
increase reported by the IPCC, when plausible
model parameters and surface forcing are used.
The ocean-atmosphere system is represented by
using a simple energy balance model consisting of
two boxes that represent the atmosphere (one over
the land and the other over the ocean) and two boxes
that represent the oceanic mixed layer coupled to a
diffusive ocean (Fig. 1).
The analytical solution of this kind of model can
be found in Wigley and Schlesinger (1985). The
brief description given here follows closely that of
McGuffie and Henderson-Sellers (2005). The
heating rate of the mixed layer is calculated by
assuming a constant depth in which the temperature
difference (ΔT), associated with some perturbation,
changes in response to: changes in the surface
thermal forcing (ΔQ); the atmospheric feedback,
which is expressed in terms of a climate feedback
parameter (λ); leakage of energy from the mixed
layer to the deeper ocean (ΔM). This energy flux is
used as an upper boundary condition for the
diffusive deep ocean in which the thermal diffusion
coefficient (K) is assumed to be a constant.
The
equations describing the rates of heating in
the two layers are: for the mixed layer, with total
heat capacity Cm,
MTQ
d
t
Td
C
m
(1)
for the deeper ocean layer,
z
T
K
t
T
2
0
2
0
(2)
At the interface between the surface and the deeper
layers, there is an energy source which acts as a
surface boundary condition (2). A simple
parameterization is used by imposing continuity
between the mixed-layer temperature change (ΔT)
and the deeper-layer temperature change evaluated
at the interface,
),0(
0
tzT
, i.e.
)(),0(
0
tTtT
.
Figure 1: Ocean-atmosphere system using a simple energy
balance model.
With this formulation, ΔM can be calculated from
0
0
z
ww
z
T
KcM
(3)
and used in (1). In the last equation, γ is the
parameter utilized to average over land and ocean
(values between 0.72 and 0.75), ρ
w
is the water
density and c
w
is its specific heat capacity.
Equations (1) and (2) are integrated numerically
for a period of 100 years using a forward Euler
scheme and a vertical grid for the deep ocean. All
model experiments are performed using a time step
of one day and a vertical grid with 100 points and a
spacing of 5 m, which represents a deep ocean layer
of 500 m. The internal model parameters and the
change in thermal forcing vary as follows: λ varies
from 0 to 4 Wm
-2
K
-1
, with increments of 0.25; K
varies from 10
-4
to 10
-5
m
2
s
-1
, with increments
of
5
105.0
; ΔQ varies from 0 to 8 Wm
-2
, with
increments of 0.5. A total of 6069 integrations (each
one corresponding to a combination of the varying
internal model parameters and the thermal forcing)
are carried out over the 100-year period. This range
of temperatures increase agrees with that reported by
the IPCC (IPCC, 2007).
3 FUZZY MODELING
APPROACHES
As Klir stated in his book (Klir and Elias, 2002), the
view of the concept of uncertainty has been changed
in science over the years. The traditional view looks
to uncertainty as undesirable in science and should
be avoided by all possible means. The modern view
is tolerant of uncertainty and considers that science
should deal with it because it is part of the real
world. This is especially relevant when the goal is to
FUZZY APPROACHES FOR MODELING DYNAMICAL ECOLOGICAL SYSTEMS
375
construct models. The fuzzy set theory, introduced
in (Zadeh, 1965), allow dealing with uncertainty in a
natural way, by means of the concept of objects that
have not precise boundaries (fuzzy sets). In this
paper three hybrid approaches of fuzzy systems are
used to model the global temperature change in the
earth, i.e. neuro-fuzzy systems, genetic-fuzzy
systems and the Fuzzy Inductive Reasoning
methodology.
3.1 Neuro-fuzzy Systems
A neuro-fuzzy system is a fuzzy system that uses
learning methods derived from neural networks to
find its own parameters, as the membership
functions of the input variables. In this work the
Adaptive Network based Fuzzy Inference System
(ANFIS) is used since is one of the more popular
neuro-fuzzy system reported in the literature (Jang,
1993). ANFIS is a function of the Fuzzy toolbox of
Matlab
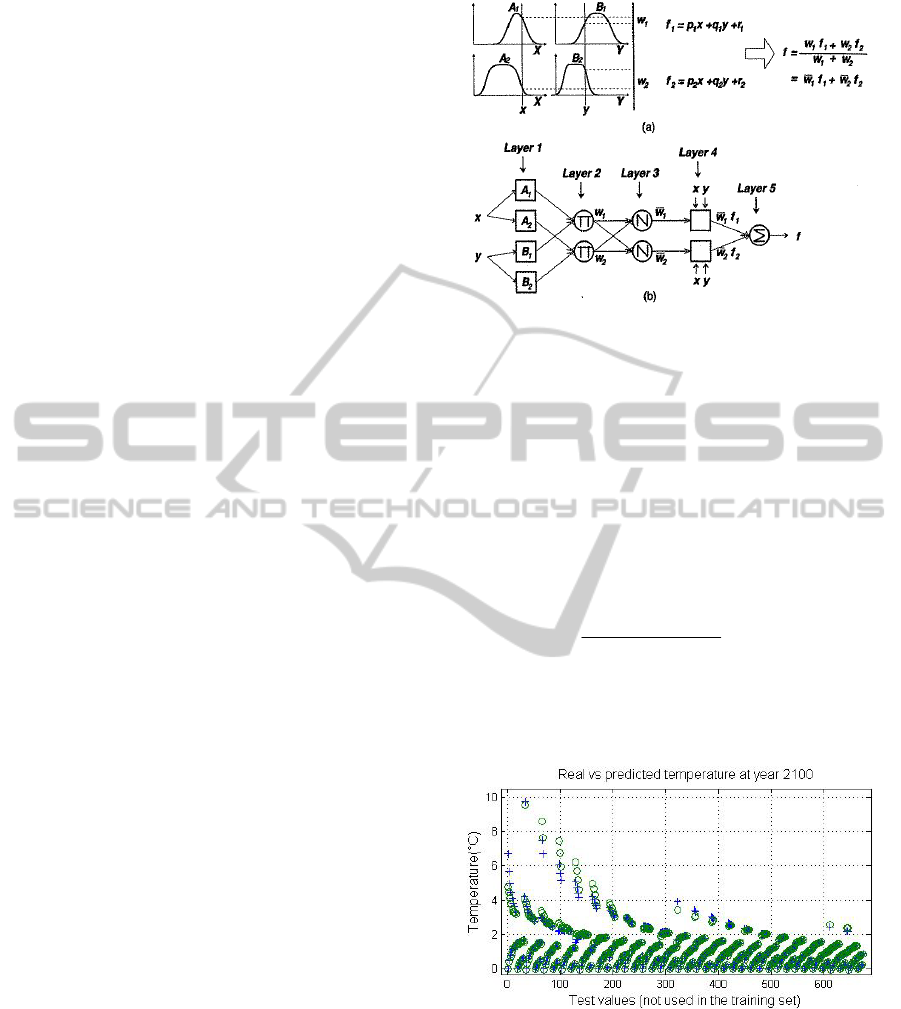
ANFIS represents a Sugeno-type neuro-fuzzy
system in a five-layer feedforward network
architecture (see Fig. 2). The rule base must be
known in advance and ANFIS adjusts the
membership functions of the antecedents and the
consequence parameters applying a mixture of
backpropagation and least mean squares procedure.
The main characteristic of the Sugeno inference
system is that the consequent or output of the fuzzy
rules is not a fuzzy variable but a function, as shown
in equation (4).
(4)
This has the advantage that the fuzzy system
functions are differentiable and learning algorithms
based on gradient descendent methods are
applicable. Fig. 2 shows the Sugeno type fuzzy
reasoning model (plot (a)) and its equivalent ANFIS
network structure (plot (b)).
In the application at hand the ANFIS model is
composed of 27 Sugeno rules, as the ones described
in equation (4), due to the fact that 3 membership
functions were used to represent the three input
variables. The ANFIS parameters are optimized by
using a set of 5395 data points obtained from the
experiment explained in section 2.
Figure 2: (a) Sugeno type fuzzy reasoning model. (b)
Equivalent ANFIS model. Figure extracted from (Jang,
1993).
The ANFIS model is validated by predicting the
temperature change of 674 data points not used for
training the model (also obtained from section 2.2).
ANFIS is able to predict very accurately the
temperature change test values, with a very low
normalized mean square error in percentage (MSE)
of 2.38%. The MSE is computed by means of
equation (5).
2
ˆ
() ()
.100%
()
Eyt yt
MSE
VAR y t
(5)
where ŷ (t) is the predicted output, y(t) the system
output and VAR denotes variance. The real vs. the
predicted test data is shown in Fig. 3.
Figure 3: Real (‘
+
’) vs. Predicted (‘o’) test values when
using the ANFIS model to predict the temperature increase
at year 2100.
3.2 Genetic-fuzzy Systems
A Genetic Fuzzy System (GFS) is basically a fuzzy
system augmented by a learning process based on
evolutionary computation, which includes genetic
algorithms, genetic programming, and evolutionary
Rule
1
: If X is A
1
and Y is B
1
then f
1
= p
1*
x + q
1*
y + r
1
Rule
2
: If X is A
2
and Y is B
2
then f
2
= p
2*
x + q
2*
y + r
2
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
376

strategies, among other evolutionary algorithms
(Cordon et al., 2001). In this study three different
GFS based on iterative rule learning are analyzed,
i.e. TSK-IRL-R, MOGUL-TSK-R and MOGUL-
IRLHC-R. All of them are functions of the Keel
software (Keel, 2004).
In the iterative rule learning approach each
chromosome in the population represents a single
fuzzy rule, but only the best individual is considered
to form part of the final rule base. Therefore, it is
runed several times to obtain the complete
knowledge base. The advantage is that it reduces
substantially the search space, because in each
iteration only a fuzzy rule is searched. A
postprocessing stage is needed to force the
cooperation among the fuzzy rules generated in the
first stage.
3.2.1 TSK-IRL-R
The Iterative Rule Learning of Takagi–Sugeno-Kang
Rules (TSK-IRL-R) approach is a two-stage
evolutionary process to automatically learn
knowledge bases from examples (Cordon and
Herrera, 1999). The learning process is divided into
the generation and the refinement stages. The
generation stage allows to automatically deriving a
preliminary Sugeno knowledge base from the
training data set. It decides the number of rules and
determines their consequent parameters, generating
a locally optimal knowledge base. The refinement
stage takes the preliminary knowledge base obtained
in the previous stage and globally refines it by
tuning the antecedent membership function and
consequent parameter definition.
The generation process is based on a (μ, λ)-
evolution strategy, in which the fuzzy rules with
different consequents compete among themselves to
form part of the preliminary knowledge base. The
refinement process adapts the antecedents and
consequents of the fuzzy rules by means of a hybrid
evolutionary approach composed of a genetic
algorithm and an evolution strategy to obtain a set of
rules that cooperate in the best possible way.
The same training and data sets described before
are used for the TSK-IRL-R algorithm to obtain a
fuzzy model of the system under study. The mean
square error in percentage (MSE, described in
equation (5)), obtained when this model is used to
predict the test data set is 3.03%. This error,
although is slightly higher than the one obtained by
ANFIS, is quite low and the plot of the real vs. the
predicted test data looks really similar to the one of
ANFIS, presented in Fig. 3.
3.2.2 MOGUL-TSK-R
MOGUL is a Methodology to Obtain Genetic fuzzy
rule-based systems Under the iterative rule Learning
approach. This methodology is composed of some
design guidelines that will allow us to obtain genetic
fuzzy rule base systems (GFRBS) to design different
types of fuzzy rule bases, i.e. descriptive and
approximate Mamdani-type and Sugeno-type.
The MOGUL-IRLHC-R is a MOGUL approach
base in the Sugeno type of rules (Alcalá et al., 2007).
The main differences respect the TSK-IRL-R is that
in the first stage it performs a local identification of
prototypes to obtain a set of initial local semantics-
based Sugeno rules. On the other hand the
cooperation between rules is accomplished in the
second stage by means of a genetic niching-based
selection process to remove redundant rules and a
genetic tuning process to refine the fuzzy
parameters. The MOGUL-TSK-R approach
proposes to use Mamdani fuzzy rules as fuzzy
prototypes to identify a set of fuzzy subspaces
grouping data with similar behaviour. The
prototypes are then use to identify Sugeno fuzzy
consequences.
The same data sets used before are used to obtain
a MOGUL-TSK-R model of the global warming
problem. In this case the MSE (see equation (5))
obtained is 3.09%, equivalent that the one reached
with the TSK-IRL-R model.
3.2.3 MOGUL- IRLHC-R
The MOGUL-IRLHC-R algorithm is also an
iterative rule learning approach that uses the
MOGUL paradigm, but in this case the goal is to
learn constrained approximate Mamdani-type
knowledge bases from examples (Cordón and
Herrera, 2001). It consists of three stages: an
evolutionary generation process, a genetic
multisimplification process and a genetic tuning
process. The first stage generates a set of fuzzy rules
with constrained free semantics covering the training
set in an adequate form. The second stage performs
a selection of rules using a binary coded genetic
algorithm with a genotypic sharing function and a
measure of the fuzzy rule base system performance.
The idea is to remove redundant rules while
maximizing the cooperation among the staying rules.
The third stage performs a tuning based on a real
coded genetic algorithm and the previous
performance measure. It adjusts the membership
functions of each rule in each possible fuzzy rule
base derived from the multisimplification process.
FUZZY APPROACHES FOR MODELING DYNAMICAL ECOLOGICAL SYSTEMS
377
Then, the more accurate fuzzy rule based obtained is
the final output of the MOGUL-IRLHC-R
algorithm.
When applied to the problem at hand we obtain a
MSE of 10.08%. It is clear that the performance
decreases with respect the results obtained by the
approaches presented so far, i.e the genetic-fuzzy
systems and ANFIS.
3.3 Fuzzy Inductive Reasoning (FIR)
FIR methodology emerged from the general systems
problem solving (GSPS) architecture developed by
Klir (Klir and Elias, 2002). It is able to perform a
selection of the system relevant variables and to
obtain the causal and temporal relations between
them in order to infer the future behavior of that
system. It offers a model-based approach to
predicting either univariate or multi-variate time
series. A FIR model is a qualitative, non-parametric,
shallow model based on fuzzy logic. FIR is executed
under the Visual-FIR platform that runs under the
Matlab environment (Escobet et al., 2007).
The model identification function is responsible
for finding causal spatial and temporal relations
between variables that offer the best likelihood for
being able to predict the future system behavior
from its own past, thereby obtaining the best model.
The FIR model is composed by its structure or set of
relevant variables (called mask) and a set of
input/output rules that represent the systems’ history
behavior (called pattern rule base). A mask denotes a
dynamic relationship among qualitative variables.
The optimality of the mask is evaluated with respect
to the maximization of its forecasting power that is
quantified by means of a quality measure, based
mainly on the Shannon entropy. Once the best mask
has been identified, it can be applied to the
qualitative data matrices that were previously
obtained in the discretization process, resulting in a
pattern rule base.
Once the FIR model is available, a prediction of
future output states of the system can take place
using the FIR inference engine that is based on a
variant of the k-nearest neighbor rule, i.e., the 5-NN
pattern matching algorithm. The forecast of the
output variable is obtained by means of the
composition of the potential conclusion that results
from firing the five rules, whose antecedents best
match the actual state. The contribution of each
neighbor to the estimation of the prediction of the
new output state is a function of its proximity. A
detailed description of FIR methodology and Visual-
FIR platform can be found in (Nebot et al., 2003;
Escobet et al., 2007).
The same training and test data sets described in
the ANFIS section have been used for training and
test the FIR model. As explained before, in order to
obtain a FIR model it is first necessary to convert the
quantitative data into qualitative data by means of
the discretization function. In this case, all the 3
input variables are discretized into 3 classes, i.e.
low, medium and high, whereas the output variable,
is discretized into 5 classes, i.e. very low, low,
medium, high and very high, following the experts
knowledge. The optimal mask obtained is composed
of all the system input variables. Therefore, FIR
finds that all three input variables are important and
that there is not redundancy in them.
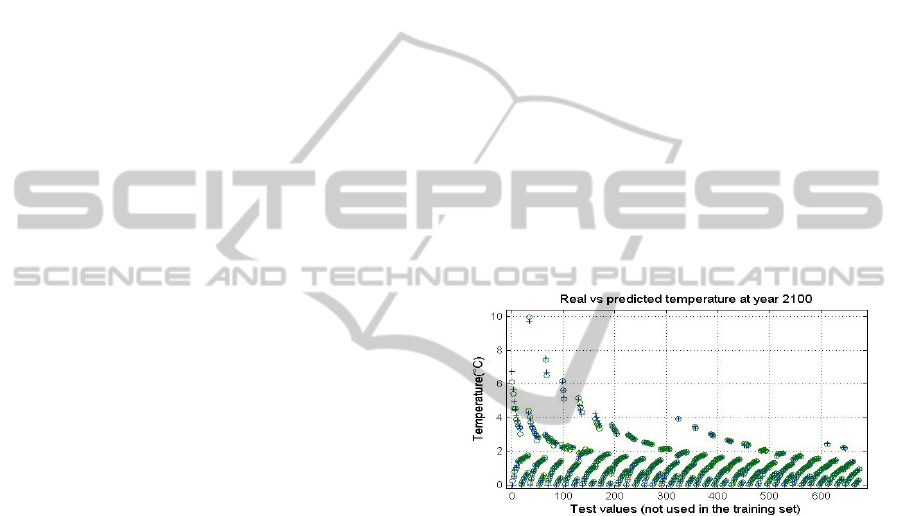
The FIR model obtained is very precise when it
is used to predict a test data set of 674 values, not
used in the training set. As can be seen in Fig. 4, the
real and the predicted values are almost
undistinguishable one from each other, being the
MSE extremely low, i.e. of 0.25%.
Figure 4: Real (‘
+
’) vs. Predicted (‘o’) test values when
using the FIR model to predict the temperature increase at
year 2100.
4 RESULTS AND DISCUSION
Table 1 summarizes the results obtained for each of
the fuzzy approaches presented in this paper when
applied to the global temperature change problem.
If we focus in the prediction performance it is
clear that the FIR methodology is the best one, much
better than the neuro-fuzzy and genetic-fuzzy
systems approaches. However, if we center in the
number of rules, ANFIS is the best choice because is
the one that captures the behavior of the system with
the lower number of rules.
It is also interesting to confirm that genetic
approaches need considerably much time than
ANFIS and FIR to learn de fuzzy rule bases.
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
378

Table 1: Results of all fuzzy approaches to the global
temperature change problem.
Method MSE #Rules Time
ANFIS 2.38% 27 15sec.
TSK-IRL-R 3.03% 50 50min.
MOGUL-TSK-R 3.09% 121 >60min.
MOGUL-IRLHC-R 10.08% 34 28min.
FIR 0.25% 56 5sec.
Therefore, it can be concluded that the different
fuzzy approaches used to model the global
temperature change problem are useful for the task
at hand, because all of them have a high level of
prediction accuracy. Depending on the users
interests it can be more desirable to choose a
methodology with high precision in the prediction,
like FIR, or a less precise model but with a small
number of rules in it, like ANFIS, MOGUL-IRLHC-
R or TSK-IRL-R.
This work is an initial attempt to compare
different types of fuzzy modeling approaches when
dealing with ecological systems. It does not pretend,
at this point, to be an exhaustive and rigorous
comparison, but to give a first inside into hybrid
fuzzy modeling of ecological problems. The next
step is to incorporate other fuzzy-based
methodologies, such is the LR-FIR, which is an
attempt to reduce the number of FIR rules obtained
while minimizing the loss of precision in the
prediction. Finally, we plan to study other ecological
problems mainly focused in climate systems.
5 CONCLUSIONS
This paper studies the usefulness of hybrid fuzzy
modelling approaches when dealing with a real
ecological system, i.e. the global temperature
change. A box model of the ocean-atmosphere, that
reproduces satisfactorily the wide range of
temperature increase reported by the IPCC, is used.
From the temperature increase calculated with
the box model, different hybrid fuzzy models are
built. Concretely, the ANFIS that is a neuro-fuzzy
system, the TSK-IRL-R, MOGUL-TSK-R and
MOGUL-IRLHC-R that are genetic-fuzzy systems
based on the iterative rule learning approach, and the
FIR methodology. All the models are able to predict
accurately the global temperature increase in the
year 2100. The fuzzy models presented in this paper
are simpler than the box model and are much more
understandable from a policy maker point of view.
REFERENCES
Alcalá, R, Alcalá-Fdez. J., Casillas, J., Cordón, O.,
Herrera, F., 2007. Local identification of prototypes
for genetic learning of accurate TSK fuzzy rule-based
systems. International Journal of Intelligent Systems,
22, 909-941.
Bloch, I., 2005. Fuzzy spatial relationships for image
processing and interpretation: a review. Image and
Vision Computing, 23(2), 89-110.
Cordon, O., Herrera, F., 1999. A Two-Stage Evolutionary
Process for Designing TSK Fuzzy Rule-Based
Systems. IEEE Transactions On Systems, Man, And
Cybernetics—Part B: Cybernetics, 29 (6).
Cordon, O., Herrera, F., 2001. Hybridizing genetic
algorithms with sharing scheme and evolution
strategies for designing approximate fuzzy rule-based
systems. Fuzzy sets and systems, 118, 235-255.
Cordon, O., Herrera, F., Hoffmann, F., Magdalena, L.,
2001. Genetic Fuzzy Systems. Evolutionary Tuning
and Learning of Fuzzy Knowledge Bases. Vol. 19 of
Advances in Fuzzy Systems - Applications and
Theory. World Scientific.
Escobet, A., Nebot, A., Cellier, F. E., 2008. Visual-FIR: A
tool for model identification and prediction of
dynamical complex systems. Simulation Practice and
Theory, 16, 76-92.
IPCC, 2007. Climate Change. Cambridge University
Press.
Jang, J.R., 1993. ANFIS: Adaptive-Network-Based Fuzzy
Inference System. IEEE Transactions on systems, man
and cybernetics, 23 (3).
Keel Platform,2004. http://sci2s.ugr.es/keel/developpment.
php.
Klir, G. J., Elias, D., 2002. Architecture of Systems
Problem Solving,Plenum Press. New York, 2
nd
edition.
McGuffie, K., Henderson-Sellers, A., 2005. A Climate
Modelling Primer. Third Edition. Wiley.
Nebot, A., Mugica, F., Cellier, F. E., Vallverdu, M., 2003.
Modeling and Simulation of the Central Nervous
System Control with Genetic Fuzzy Models.
Simulation: Society for Modeling and Simulation
International, 79(11), 648-669.
Watanabe, K., Izumi, K., Maki, J., Fujimoto, K., 2005. A
Fuzzy Behavior-Based Control for Mobile Robots
Using Adaptive Fusion Units. Journal of Intelligent
and Robotic Systems, 42(1), 27-49.
Wigley, T. M. L., Schlesinger, M. E., 1985. Analytical
solution for the effect of increasing CO2 on global
mean temperature. Nature, 315, 649-652.
Williams, P. D., 2005. Modelling climate change: The role
of unresolved processes. Phil. Trans. R. Soc. A, 363,
2931-2946.
Zadeh, L. A., 1965. Fuzzy Sets. Information and Control.
8(3), 338-353.
FUZZY APPROACHES FOR MODELING DYNAMICAL ECOLOGICAL SYSTEMS
379
