
HUMAN-ROBOT COOPERATION SYSTEM USING SHARED
CYBER SPACE THAT CONNECTS TO REAL WORLD
Development of SocioIntelliGenesis Simulator SIGVerse toward HRI
Tetsunari Inamura
1,2
1
National Institute of Informatics, Tokyo, Japan
2
The Graduate University for Advanced Studies, Hayama, Japan
Keywords:
Intelligent robots, Human-robot interaction.
Abstract:
I focus on a synthetic research on elucidation of genesis of social intelligence – physical interaction between
body and environment, social interaction between agents and role of evolution and so on –, with aiming to
understand intelligence of humans and robots. For such an approach, we have set interdisciplinal discussions
with wide viewpoint for various research field such as cognitive science, developmental psycology, brain
science, evolutionary biology and robotics. In this approach, two interactions should be considered; physical
interaction between agents and environments and social interaction between agents. However there is no
integrated system with dynamics, perception, and social communication simulations. In this paper, I propose
such a simulation environment called SIGVerse and potential to develop Human Robot Interaction systems
that bridges real environment/users and cyber space based on the SIGVerse. As examples of the HRI systems
based on SIGVerse, I introduce three applications.
1 INTRODUCTION
Understanding the mechanism of intelligence in hu-
man beings and animals is one of the most important
approaches to developing intelligent robot systems.
Since the mechanisms of such real-life intelligent sys-
tems are so complex, such as the physical interactions
between agents and their environment and the so-
cial interactions between agents, comprehension and
knowledge in many peripheral fields are required. To
acquire a better understanding of human and robotic
intelligence, I focus on a synthetic approach to re-
search into the elucidation of the genesis of social
intelligence, to cover aspects such as physical inter-
actions between bodies and their environments, social
interactions between agents, and the role of evolution.
According to the concept, SIGVerse(Inamura, 2010)
the simulateor platform to realize synthetic simulation
experiments has been proposed.
The SIGVerse simulator can be accessed from any
client computers by general public with easy inter-
face. Everyone can send their own physical agents
that have sensors, actuators and software modules for
behavior decision. The agents automatically decide
their behaviorbased on the software and acquired sen-
sor information; then act in the virtual world with con-
sideration of physical law, because the physical em-
bodiment is recently regarded as important issue to
developintelligent robots and agents. Everyagent can
also make communicate with each other via voice and
text modalities. Using such an environment, it is pos-
sible to hold interdisciplinary discussions from wide
viewpoint covering various research fields, such as
cognitive science, developmental psychology, brain
science, evolutionary biology, and robotics.
In this paper, I propose an expansion usage of
the SIGVerse simulator to connect real world and
cyber world to evaluate human robot interaction ex-
periments. Robotics research which uses expensive
humanoid robots often costs much time and budget;
however, many users can join human-robot interac-
tion world using the SIGVerse simulator. Through
several examples of interactive application, I show the
feasibility of this system.
429
Inamura T..
HUMAN-ROBOT COOPERATION SYSTEM USING SHARED CYBER SPACE THAT CONNECTS TO REAL WORLD - Development of SocioIntelliGe-
nesis Simulator SIGVerse toward HRI.
DOI: 10.5220/0003620904290434
In Proceedings of 1st International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2011), pages
429-434
ISBN: 978-989-8425-78-2
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
2 INTEGRATED SIMULATION
BETWEEN DYNAMICS,
PERCEPTION AND
COMMUNICATION
Many robot simulation systems are being devel-
oped around the world, to simulate the dynam-
ics of robot systems. One well-known example
is the Open Architecture Humanoid Robotics Plat-
form (OpenHRP)(Kanehiro et al., 2002), which is
a humanoid robot simulator developed by the Ad-
vanced Institute of Science and Technology (AIST),
the University of Tokyo, and the Manufacturing Sci-
ence and Technology Center (MSTC). This simula-
tor has become popular not only in Japan but also
abroad, to promote research into humanoid robot con-
trol. The latest version of the simulation, called
OpenHRP3(Nakaoka et al., 3647), is currently be-
ing developed by AIST, the University of Tokyo,
and General Robotix Inc. Another example is We-
bots(Michel, 2004), which is a commercial prod-
uct. This system enables users to simulate multi-
robot environments with dynamics calculations. The
Player/Stage/Gazebo suite(Gerkey et al., 2003) is
freeware and is also well-known. Microsoft also has
released Robotics Studio(Jackson, 2007) to develop a
software of autonomous agents from the similar back-
ground. These systems provide multi-agent environ-
ments with dynamics simulations, but there hasn’t
been much consideration of the simulation of sen-
sor perceptions. Since the communication simula-
tions between agents provided in these packages are
just simple signal transfers, it is difficult to use them
to simulate the effects of the physical conditions of
the agents for dialogue-based communicationabilities
and qualities.
Meanwhile, large-scale multi-agent systems are
gaining attention from the social sciences field. One
of the examples is GPGSiM(Ishiguro, 2007). In
the field of language evolution, a system that has
been proposed simulates language transmission be-
tween agents which is based on a repeatable learning
model(Kirby and Hurford, 2002), However, such sim-
ulators do not consider the physical perception layer
such as visual and auditory sensors, nor the physical
communication layer such as limitations of commu-
nications based on the condition of each agent. The
integration of dynamics, perception, and communica-
tion in the simulation world will play a great role in
this social sciences field.
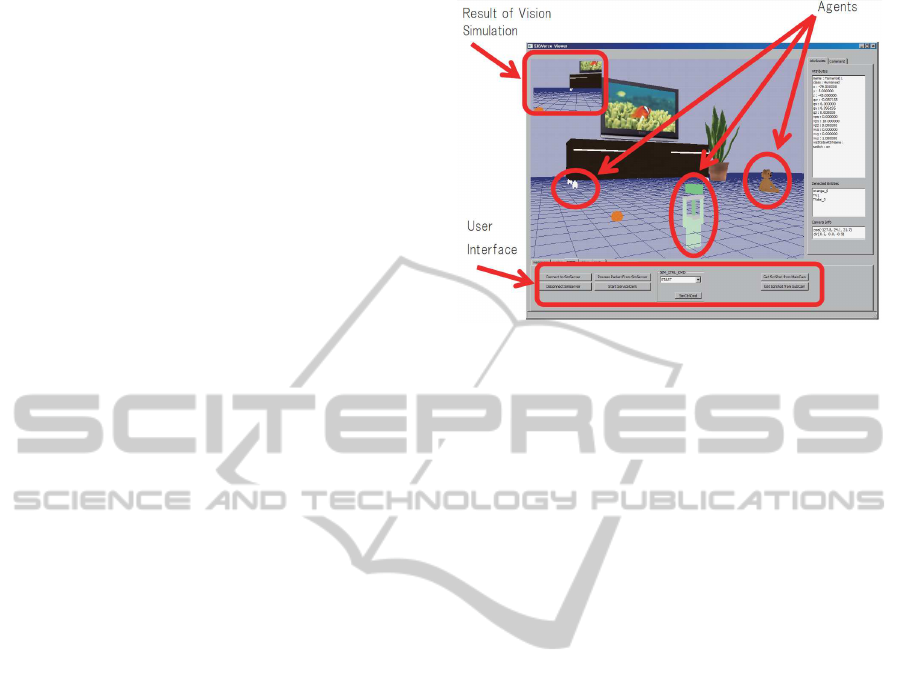
The proposed SIGVerse simulator(Inamura, 2010)
combines dynamics, physical perceptions, and com-
munications for a multi-agent system. One of the
Figure 1: A screenshot of user interface.
effective applications of this system is that machine
learning experiments for real robots. Machine learn-
ing systems such as reinforcement learning for real
robots often cost much time and trials; however it is
easy to reduce the learning time to attend the SIG-
Verse simulator to make communicate with other ex-
pert robots which has already acquired a skill of the
target problem. With the communication between two
robots and fast physical experiments, the rookie robot
can grow up within short time.
This simulator consits of major three parts; Dy-
namics simulation, Perception simulation and Com-
munication simulation.
2.1 Dynamics Simulation
The Open Dynamics Engine (ODE)(Smith, 2004) is
used for dynamic simulations of interactions between
agents and objects. Basically, the motions of each
agent and object are calculated by the dynamics en-
gine, but the user can control the calculations to re-
duce simulation costs. A switch flag can be set for
each object and agent to turn off the dynamics calcu-
lations if required.
2.2 Perception Simulation
This system can provide the senses of vision, sound,
force, and touch. OpenGL is used for visual simula-
tions, to provide each agent with a pixel map that is
a visual image derived from the viewpoint and field
of view of that agent. In this case, the perception
simulation has several levels that control the abstract
level of perception. At a highly abstract perception
level, the user is sent symbolized visual information,
which comprises data such as the color, shape, size,
and position of each object within sight, together with
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
430

Figure 2: GUI interface for a cooperation task on SIGVerse.
Figure 3: A haptic interface to handle an “okonomiyaki”.
Figure 4: Realtime measurement and display of human mo-
tion pattern.
characteristic information on the name and ID num-
ber of each object. The visual perception processing
also considers occlusions so that if an object is be-
hind another object, the perception processing omits
the hidden object from the list.
For the sense of touch, it is possible to acquire
force and torque information between objects that has
been calculated mainly by ODE.
2.3 Communication Simulation
In simulating the sense of hearing, every agents can
make communications with audio data. I also enabled
the effect of the volume of sound attenuating in in-
Figure 5: Embodied interaction system for a okonomiyaki
task on SIGVerse.
Figure 6: Experiment on motion coaching application using
the SIGVerse.
verse relationship with the square of distance, based
on a setting of a condition that the voice emitted by an
agent becomes more difficult to hear with distance. It
is also possible to set the system so that only voices
within a certain threshold distance are acquired.
With this system, not only can agents within the
virtual environment communicate with each other, it
is also possible to provide a function that enables in-
teractions between the virtual environment and users
in the real world. An example of the display of the
virtual environment is shown in Figure 2.
2.4 Simulator Configuration
This simulator has a server/client format, with dy-
namics calculations being mainly done on a central
server system. Bodies that use perception and per-
form actions are called ”agents”, and robot and human
HUMAN-ROBOT COOPERATION SYSTEM USING SHARED CYBER SPACE THAT CONNECTS TO REAL
WORLD - Development of SocioIntelliGenesis Simulator SIGVerse toward HRI
431

avatars are available as agents. The previously de-
scribed perception and communication functions can
be enabled by using dedicated C++ APIs to define the
actions of agents. Some of the APIs that can be used
are listed in Table 1. In the future, I plan to extend the
programming beyond just C++ to include interpreter
languages such as Python. The avatars do not just be-
have as programmed—they can also act on the basis
of instructions given to them by operators in real time.
To simulate perception, it is necessary to spread
the load so the system is configured to enable calcula-
tions not just by the server system but also by individ-
ually installed perception simulation servers. More
specifically, the module that provides a pixel map of
an image to simulate the sense of sight is operated
by the perception simulation server, not the central
server.
The configuration of the SIGVerse software is
shown in Figure 3.
3 EXAMPLE OF SIGVERSE USE
A feature of SIGVerse is the way in which dynamic
calculations, perception simulations, and communica-
tion simulations can be done simultaneously. In this
section, I describe an example of humans and robots
working in partnership to execute a task, and another
example of multi-agent system, as examples of appli-
cations that fully utilize all three of these functions.
3.1 Use as Evaluation of
Human-machine Cooperation
The objectives of the developers who use this sim-
ulation are to determine how to develop the intelli-
gence of a robot that can execute a task in partnership
with a human, and how to implement efficient coop-
erative behavior. The developers created decision and
action modules for the robot while adopting various
different models and hypotheses, and have confirmed
their performance on the simulator. During the simu-
lation, cooperation is required between a real-life hu-
man and a robot, which cannot be implemented oth-
erwise without purchasing and developing a life-size
humanoid robot. In this simulation, the operator who
is in partnership with the robot manipulates an avatar
in a virtual environment to reproduce cooperative ac-
tions between a user and a humanoid robot. An intel-
ligence module created by the developers uses virtual
equivalents of the senses of sight and hearing to com-
prehend the situation within that space and recognize
the state of the user, performs dynamic calculations
to control arms, and also simulates communications
between the avatar and the robot. Expanding on this
kind of usage example will not only further research
into simple human-machine cooperation, it will also
enable the construction of a research and teaching
system with a competitive base for applications such
as Robocup(Kitano et al., 1998).
Taking the above application as an example, I im-
plemented a situation in which a human being and a
robot cooperate in the task of ”cooking okonomiyaki”
in SIGVerse (”okonomiyaki”is a popular cook-at-the-
table food in Japan, like a thick pancake). Examples
of the screens during the execution of this application
are shown in Figure 2. The GUI that the operator can
use has buttons such as ”flip the pancake”, ”oil the
hotplate”, ”apply sauce”, and ”adjust the heat”.
Furthermore, providing immersive interface to
the users is very important to conduct realistic phy-
cophisical experiments throught the simulator. Fig.3
shows an example in which the user can operate
the cooking devices with haptic interface PHANToM
Omni to manipulate the “okonomiyaki”.
The objectiveof the task is to cooperate in cooking
the okonomiyaki as fast as possible, without burning
it. The operator basically uses the GUI to propel the
work forward, but the robot continuously judges the
current situation and, if it considers it can do some-
thing in parallel with the work that the operator is do-
ing, asks the operator questions such as ”Should I oil
the hotplate now?” or ”Should I turn the heat down?”
It then executes those jobs while viewing the opera-
tor’s responses. Figure 2 shows a scene in which the
avatar in the virtual environment is about to flip the
pancake based on the operator’s instructions with a
help of robot agent.
I performed experiments on two cases: one in
which the operator performed all of the steps through
the GUI, and one in which the robot did suitable parts
of the operator’s work instead. In the first case in
which the operator did all of the work, the task re-
quired three minutes 14 seconds before it was fin-
ished, but in the second case involving cooperation,
the task took one minute 58 seconds to complete. In
this manner, it is possible to make effective use of
this system as a tool for quantitatively evaluating the
human-machine cooperation systems.
3.2 Introduction of Immersive
Interaction Space for the SIGVerse
Above applications used an usual display interface
such as web browser worked on personal computer.
However, if the aim of the application is to treat natu-
ral and real motion patterns of whole body that should
connect real world and cyber world, interface devices
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
432
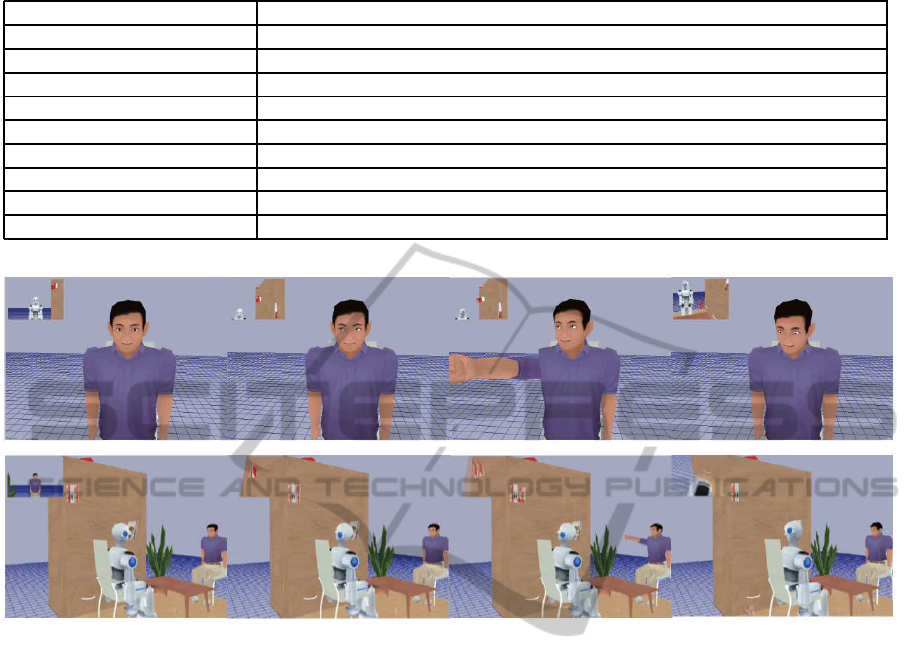
Table 1: Lists of available API functions.
setJointAngle (arg1, arg2) Set the angle of joint arg1 be arg2
setJointTorque (arg1, arg2) Set the torque of joint arg1 be arg2
getPosition Get 3D position of the target object
getRawSound Get audio information cast by other agents
sendRawSound Utter speech as sound information
sendText(text, distance) Cast a text message text to agents who are existing within a distance distance
captureView Get pixel map as a visual sensor from eyesight of an agent
detectEntities(arg) List up all of the agents which is seen by an agent arg
getObj(arg) Get ID number of an object arg
getObjAttribution(arg1, arg2) Get attribution value for attribute arg2 of an aobject arg1
Figure 7: Experiment on joint attention between human and robot. The robot observes direction of the user’s eyes. Using
joint attention, the robot could avoid the falling object from a shelf.
would be a bottleneck. To solve this problem, an
immersiveinteraction system named SD-GRIS(Kwon
and Inamura, 2010) was developed and integrated to
the SIGVerse system. The SD-GRIS can project all-
around view of SIGVerse world to surrounding dis-
plays. Additionally, an optical motion capturing sys-
tem is installed in the display space. User can interact
with virtual agents with gestures and such as intuitive
instruction system with mobile robot agents(Kwon
and Inamura, 2010) as shown in Fig.5, that is previous
Okonomiyaki application.
As an application of human-robot interaction us-
ing the immersive system is robotic motion coaching
system(Okuno and Inamura, 2010), in which a robot
trains human beings to be able to perform good sports
motions even though the subjects are beginners. A
trainer, that is a virtual humanoid robot, performs a
target motion. A human as a subject imitates the per-
formed motion; the virtual robot evaluate the human’s
motion as trainer. If the human’s performance was
far from the target motion, the robot modify the next
performance according to the human’s error to let the
human’s performance be biased to the target motion.
Currently, a optical motion capturing system is used
for the training application; however, simple and con-
venient device such as Kinect was connected to the
system, training could be applied for general public
who are connecting to the system from all over the
world. An outlook of the motion coaching experi-
ment is shown in Fig.6. This is another potential of
the proposed system.
3.3 Joint Attention
Another significant function is to simulate direction
of eyes of each agent. One of the important element
in human-robot interaction is to recognize and control
direction of eyes to establish joint attention for natural
intaraction. Each agent in this system has a propety of
eyes’ direction. If a user ware eye tracker with HMD
device, the information would be sent to the simu-
lation system; the avator’s direction of eyes is con-
trolled by the real information. Since the surrounding
scene image is displayed on the HMD, the user can
behave if the user was standing just in front of the
robot in the virtual SIGVerse world. Fig.7 shows a
HUMAN-ROBOT COOPERATION SYSTEM USING SHARED CYBER SPACE THAT CONNECTS TO REAL
WORLD - Development of SocioIntelliGenesis Simulator SIGVerse toward HRI
433

sequence of experiment on establishment of joint at-
tention between virtual robot and user.
4 CONCLUSIONS
I have proposed the concept of a simulation platform
in which dynamic simulations of bodies, simulations
of senses, and simulations of social communications
are integrated into the same system, as an approach to
the interdisciplinary research necessary for compre-
hending the mechanism of intelligence in human be-
ings and robots, and reported on the implementation
of a prototype system named the SIGVerse(Inamura,
2010).
In this paper, an expansion usage of the SIGVerse
was introduced to promote researches on human-
robot interaction. Usual human-robot interaction ex-
periments tend to work on only one user and one
robot. However, it is important to perform wide and
long term experiments with a lot of users and mul-
tiple robots to discuss social intelligence. Addition-
ally, not only simple interface such as web browser,
but also natural and rich interface such as whole body
motion and eyesight are important to performe natural
human-robot interaction. Through several functions
and applications, I showed the feasibility of applying
the SIGVerse to this grand challenge for human-robot
interaction.
REFERENCES
Gerkey, B., Vaughan, R. T., and Howard, A. (2003). The
player/stage project: Tools for multi-robot and dis-
tributed sensor systems. In Proceedings of the 11th
International Conference on Advanced Robotics, page
317323.
Inamura, T. (2010). Simulator platform that enables so-
cial interaction simulation sigverse: Sociointelligen-
esis simulator. In Proc. of IEEE/SICE International
Symposium on System Integration, page 212217.
Ishiguro, K. (2007). Trade liberalization and bureauplural-
ism in japan: Two-level game analysis. technical re-
port 53. Technical report, Kobe University Economic
Review.
Jackson, J. (2007). Microsoft robotics studio: A technical
introduction. IEEE Robotics & Automation Magazine,
14(4):82–87.
Kanehiro, F., Fujiwara, K., Kajita, S., Yokoi, K., Kaneko,
K., Hirukawa, H., Nakamura, Y., and Yamane, K.
(2002). Open architecture humanoid robotics plat-
form. In Proceedings of the 2002 IEEE International
Conference on Robotics & Automation, page 2430.
Kirby, S. and Hurford, J. (2002). Simulating the Evolu-
tion of Language, chapter The emergence of linguistic
structure: An overview of the iterated learning model.,
page 121148. Springer Verlag.
Kitano, H., Asada, M., Kuniyoshi, Y., Noda, I., Osawai, E.,
and Matsubara, H. (1998). Lecture Notes in Computer
Science, volume 1395, chapter Robocup: A challenge
problem for ai and robotics., page 119. Springer.
Kwon, O. and Inamura, T. (2010). Surrounding display and
gesture based robot interaction space to enhance user
perception for teleoperated robots. In Intl Conf. on
Advanced Mechatronics, page 277282.
Michel, O. (2004). Webots: Professional mobile robot sim-
ulation. International Journal of Advanced Robotic
Systems, 1(1):394.
Nakaoka, S., Hattori, S., Kanehiro, F., Kajita, S., and
Hirukawa, H. (36413647). Constraint-based dynamics
simulator for humanoid robots with shock absorbing
mechanisms. In Proceedings of the 2007 IEEE/RSJ
International Conference on Intelligent Robots and
Systems.
Okuno, K. and Inamura, T. (2010). A research on motion
coaching for human beings by a robotics system that
uses emphatic motion and verbal attention. In Hu-
manoids 2010 Workshop on Humanoid Robots Learn-
ing from Human Interaction.
Smith, R. (2004). Open dynamics engine v0.5 user guide.
http://www.ode.org/.
SIMULTECH 2011 - 1st International Conference on Simulation and Modeling Methodologies, Technologies and
Applications
434
