
TOWARDS A DESCRIPTION LOGIC FOR SCIENTIFIC MODELING
Jean-Pierre M¨uller
1
, Hasina Lalaina Rakotonirainy
2
and Dominique Herv´e
3
1
GREEN, CIRAD, Campus international de Baillarguet, Montpellier, France
2
ENI, University of Fianarantsoa, Fianarantsoa, Madagascar
3
IRD, MEM, University of Fianarantsoa, Fianarantsoa, Madagascar
Keywords:
Ontology, Metrology, Geographic representation, Knowledge representation.
Abstract:
The classical ontologies are based on description logics. Most of the proposed variants fit within the logical
framework, with the exception of the introduction of data types. This later extension is suitable for computer
scientists but not appropriate for scientists in general. Indeed, most scientists use quantities with full unit
systems as defined in metrology. More specifically, the geomaticians use, in addition to attributed or relational
structures, what they call coverages, i.e. mappings from coordinates into data. Separate efforts have been
made to formalize these aspects but none coped with all of them in an integrated knowledge representation
framework. The aim of this paper is to propose description logic extensions able to integrate these various
aspects into the general framework of knowledge representation, as a way to talk about matter and space.
1 INTRODUCTION
To model complex systems, (Villa et al., 2009) pro-
pose to distinguish three categories of modeling plat-
forms: 1) programming frameworks like Repast (Col-
lier, 2003), 2) declarative modeling environments like
Stella (Richmond and Peterson, 2000) and 3) seman-
tic modeling platforms. The later category is further
divided into two approaches. The mediation approach
where the sub-models inputs and outputs are docu-
mented for better integration. The knowledge-driven
approach where the model content is itself described
using knowledge representation approaches. The in-
tent is ”to exploit the formalized semantics of natural
systems to unify representationsof data and metadata,
improve their usability in scientific workflows, and
ease the definition of dynamic models” (Villa et al.,
2009). In the Mimosa platform, (Muller, 2010) uses
ontologies to specify entirely a model, as advocated in
(Muller, 2007). The ontologies are then mapped into
a simulation model based on DEVS (Zeigler et al.,
2000).
The ontology we are using in Mimosa is equiva-
lent to the A L Q
(D )
description logic, i.e. with roles,
cardinality restrictions and the base data types (inte-
gers, doubles, strings). However our experience of
using this ontology for complex eco-sociosystems re-
veals a systematic use of quantities and complex spa-
tial structures. Although the definitions of these quan-
tities and structures are expressible with standard on-
tologies (see, for example, (Brilhante, 2004)), their
systematic use suggests to incorporate them as first
class citizens in the formalism as it was made with
data types.
The aim of this paper is to propose extensions
to description logics. It appears to be a general at-
tempt to semantically incorporate continuous mat-
ter (including space and time) where logics are only
based on objects. A first section introduces the usual
syntax and semantics of description logics. The next
section formulates the requirements. Then we pro-
pose syntactic extensions to description logics with
its associated semantics before concluding.
2 CLASSICAL DESCRIPTION
LOGICS
This section recalls the description logics syntax and
semantics to define where we are starting from.
2.1 The Syntax
An ontology semantics is formalized with description
logics. The most common language called A L C (for
Attributive Language with Complement) is based on
the triplet L = hC, P,Oi, where C is the set of concept
183
Müller J., Lalaina Rakotonirainy H. and Hervé D..
TOWARDS A DESCRIPTION LOGIC FOR SCIENTIFIC MODELING.
DOI: 10.5220/0003634201830188
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2011), pages 183-188
ISBN: 978-989-8425-80-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

names, P the set of role (or relation) names, and O
the set of individual names. The triplet is called the
signature of the language. Based on this signature,
three sets of constructs are defined: the concepts, the
terminological axioms and the assertional axioms.
In A L C the set of possible concepts is recursively
defined as follows:
• ⊤ is the everything concept;
• ⊥ is the nothing concept;
• every C ∈ C is a concept;
• ¬C: the negation of a concept C is a concept;
• C⊓D: the intersection of two concepts C and D is
a concept;
• C ⊔ D: the union of two concepts C and D is a
concept;
• ∀r.C: the universal restriction of a concept C by a
role r ∈ P is a concept;
• ∃r.C: the existential restriction of a concept C by
the role r ∈ P is a concept.
Intuitively, these constructs allow to derive concepts
from other concepts, the last two constructs introduc-
ing attribute and/or relation definitions among con-
cepts.
The set T of terminological axioms is defined as
follows:
• C ⊑ D: states that the concept C is included in D;
• C ˙=D: when C ⊑ D and C ⊒ D, sometimes called
a concept definition when C ∈ C.
The set of terminological axioms forms the TBox or
conceptual model. Intuitively, these axioms introduce
concept inheritance and definition. The atomic con-
cepts are ⊤, ⊥ and the concepts that do not appear in
the left-hand side of the terminological axioms. The
other concepts are called the derived concepts in the
set-theoretical sense.
As an example, we can define an agent, a member
or a community, in the following way:
• Agent ⊑ ∀name.String: literally, the set of agents
is included into the set of everything that has a
name of type String.
• Community ⊑ (¬Agent ⊓ ∀name.String ⊓
∀chief.Member): the set of communities is
included in the set of everything that is not an
agent but has a name and a chief.
• Member ⊑ (Agent ⊓ ∀chief.Member ⊓
∀group.Community): the set of members is
included in the set of agents that have a chief and
a community.
It is equivalent to descriptions in any frame-like repre-
sentation language but with a richer expressivity (for
example that communities cannot be agents).
The set A of assertional axioms is defined as fol-
lows:
• C(a): states that an individual a ∈ O is an instance
of the concept C;
• r(a, b): states that the pair of the individuals a, b ∈
O is an instance of the role r ∈ P.
The set of assertional axioms forms the ABox or con-
crete model. Intuitively, these axioms describe a con-
crete system made of categorized individuals and re-
lations.
As an example, we can define a community and
a member: Community(c1), name(c1,”Antontona”),
Member(p1), name(p1,”Hasina”), ....
A knowledge base is a pair hT, Ai of axioms, al-
though, most of the time, only T is given. Finally, an
ontology O is a pair hL,hT, Aii.
2.2 The Semantics
The above-described language admits a set-theoretic
interpretation I which is given by a pair h∆,πi where:
• ∆ is a set of objects called the domain of dis-
course;
• π is a function attributing a meaning to the signa-
ture and recursively to concepts in the following
way
1
:
– π(C ∈ C) = {x
i
|x
i
∈ ∆}
– π(r ∈ P) = {(x
i
,y
i
)|x
i
,y
i
∈ ∆}
– π(o ∈ O) = x ∈ ∆
– π(⊤) = ∆
– π(⊥) =
/
0
– π(¬C) = {x
i
|x
i
6∈ π(C)}
– π(C⊓ D) = {x
i
|x
i
∈ π(C) ∧ x
i
∈ π(D)}
– π(C⊔ D) = {x
i
|x
i
∈ π(C) ∨ x
i
∈ π(D)}
– π(∀r.C) = {x
i
|∀y.(x
i
,y) ∈ π(r) ⊃ y ∈ π(C)}
– π(∃r.C) = {x
i
|∃y.(x
i
,y) ∈ π(r) ∧ y ∈ π(C)}
Given these definitions, an interpretation I is a
model for the axioms according to the following con-
ditions:
• I |= C ⊑ D if and only if ∀x,x ∈ π(C) ⊃ x ∈ π(D)
(or equivalently π(C) ⊆ π(D))
• I |= C ˙=D if and only if π(C) = π(D)
• I |= C(a) if and only if π(a) ∈ π(C)
• I |= r(a,b) if and only if (π(a),π(b)) ∈ π(r)
1
The semantics specification style complies with classi-
cal logics but not with description logics literature!
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
184

Accordingly, an interpretation I is a model of a knowl-
edge base hT,Ai (I |= hT,Ai) if and only if I |= t for all
t ∈ T and I |= a for all a ∈ A. If no model exists for a
knowledge base, the knowledge base is inconsistent.
2.3 Some Existing Extensions
Other description logics exist, qualified with letters,
which define some restrictions or extensions. Existing
extensions are, for example:
• O : introduces concepts as sets of individuals;
• N : for cardinality restrictions;
• Q : for fully qualified cardinality restrictions;
•
(D )
: when data types (integer, double, etc.) and
values are introduced;
For example, in the
(D )
description logic, the ba-
sic data types (integer, double, etc.) are introduced
among the atomic concepts as well as the correspond-
ing data values (45, 10.5, true, etc.) among the atomic
individuals. The existence of data values is equivalent
to an (almost) infinite set of assertional axioms for all
the instances of the basic types.
3 REQUIREMENTS
Our experience in designing large models with scien-
tists of various disciplines (Aubert et al., 2010; Belem
et al., 2011) is the following:
• they do not use data types and data values but
quantities (i.e. length, weight, etc.) and measures
(i.e. values with units);
• the structures are accessed by coordinates and not
only (role) names;
• there is a variety of points of view, possibly of the
same things.
Philosophically a quantity is a property which
exists as a magnitude or a multitude. A physical
quantity, as defined by the International Vocabulary
of Metrology, 3rd edition, is a property of a phe-
nomenon, body, or substance, where the property has
a magnitude that can be expressed as a number and
a reference. The International System of Quantities
defines seven quantities from which all the others can
be defined: the length, the time or duration, the mass,
the electric current, the thermodynamic temperature,
the amount of substance and the luminous intensity.
A quantity is measured by a real number and a unit.
The international system proposes to measure length
in meters (m), duration in seconds (s), mass in kilo-
grams (kg), the electric current in amperes (A), the
temperature in degrees Kelvin (K), the amounts of
substance in moles (mol) and the luminous intensity
in candelas (cd). All the other units can be obtained
by combining these units with ∗, / and ˆand multipli-
cation with some factors (e.g. 1000∗ N ∗ cd
2
/m also
named kilo − N ∗ cd
2
/m). When dividing a unit by
itself, the resulting unit is said dimensionless.
All the attributes of an object describe its qualities
in the philosophical sense. In effect, in the philosoph-
ical language, ”being red” or ”having 1.6 meters” are
qualities of individuals. Therefore the measures are
just descriptions of the physical qualities of individu-
als which appear to be quantitative. Very often a set of
these qualities (height, age, weight, etc.) is necessary.
The set acts as a coordinate in the space of physical
qualities. Therefore a coordinate is a vector of quali-
ties. We will use this definition in the following.
If a coordinate is a position of an individual in a
space of qualities, the space itself is an object where
individual objects or descriptions can be obtained
given a coordinate. These mappings from coordinates
into individuals are very often used in complex sys-
tem modeling . The geomaticians call them coverages
in the particular case where coordinatesare only made
of lengths or angles.
Finally, the coordinates are measured relative to a
reference. If we refer to qualities in general (and not
only the physical qualities), even how we name things
is relative to a context or a point of view which acts
as a terminological reference system. Coordinates are
ways of naming things as a terminology is a way to
name objects.
4 OUR PROPOSITION
4.1 The Syntax
We propose to define the following atomic concepts
instead of the data types:
• Name is the concept of all possible strings of char-
acters. We distinguish it from the ”String” data
type to keep us apart from any programming no-
tion. However, the corresponding individuals are
just strings.
• {... ,o
i
,...} where each o
i
is in O, is a concept,
called an enumeration. The corresponding de-
scription logic is therefore of type O . The con-
struct C ˙={.. .,o
i
,...} is both considered a termi-
nological axiom and a set of assertional axioms of
the form C(o
i
) for each o
i
.
• (... ,o
i
,...) where each o
i
is in O, is a concept,
called a series. In terms of instance, it is similar to
TOWARDS A DESCRIPTION LOGIC FOR SCIENTIFIC MODELING
185

{... ,o
i
,...}, but the elements are considered or-
dered. The construct C ˙={. .., o
i
,...} is also con-
sidered a terminological axiom and a set of asser-
tional axioms of the form C(o
i
) for each o
i
as well
as < (o
i
,o
j
) for all the appropriate couples.
We also want to introduce two derived concepts:
• set(C) where C is a concept, is also a concept,
called a set. It is the set of all the sets of elements
of π(C). Of course sets of sets are possible.
• range(C, o
1
,o
2
) where C is a concept and o
1
and
o
2
are the individual names of elements of π(C),
is also a concept called a range. The syntax could
be extended for allowing opened, closed or semi-
opened (or semi-closed) intervals. A range is only
possible if C is ordered.
Most importantly, we introduce the following con-
structs for dealing with continuous matter as qualities,
coordinates and mappings.
The quantities are predefined atomic concepts
(e.g. Length, Weight, Duration, etc.) entirely replac-
ing the data types. At least the seven physical quan-
tities mentioned in section 3 must be defined. Addi-
tional ones can be provided as needed. The instance
of a quantity is a measure. A name of a measure is of
the form rU where r ∈ R and U is a unit depending
on the quantity it is an instance of (e.g. 1kg, 50.3m,
12cd, etc.). The assertional axiom C(rU) is assumed
where C is the quantity measured with the unitU (e.g.
Weight(3.2kg)).
The coordinate concepts are de-
rived concepts defined by the construct
hC
1
,... ,C
n
i where C
i
are atomic concepts (e.g.
hWeight,Length,{low,medium,high}i) or ranges.
We consider ho
1
,... ,o
n
i where o
i
are individual
names as an individual name for a coordinate (e.g.
h1kg,5.3m,highi is a coordinate name). We can
have coordinates over unbounded spaces by having
at least one concept C
i
denoting an unbounded set
(e.g. Weight). A coordinate over a bounded space
can be specified either by having each C
i
denoting
a bounded set (e.g. range(Weight,0kg,100kg))
or by defining a range on a coordinate concept
(e.g. range(hWeight,Length,{low,medium,high}i,
h0kg,0m, lowi,h100kg,10m,highi)). Therefore, we
consider a range over a coordinate concept as a
coordinate concept.
For dealing with indexed spaces, we propose to
extend the set of roles P with the coordinates. There-
fore we propose to introduce the expressions: ∀R.C
and ∃R.C where both R is a coordinate concept and
C is a concept. Therefore we can define concepts as
Elevation ⊑ ∀hLength,Lengthi.Length, i.e. as a two-
dimensional map. Similarly, a space can be defined
as a set of named places: Space ⊑ ∀hNamei.Place.
This extension is the most important one, introduc-
ing a limited form of second-order quantification for
tractability.
To take into account the multiplicity of points of
view, one step is to introduce a set of indexed ontolo-
gies O
i
where i ∈ I and a notation i : C for any con-
struct C. The later notation allows to reference the
construct as described in ontology i. If we want a real
modularity, each ontology O
i
has his own interpreta-
tion h∆
i
,π
i
i (see for example (Jie Bao and Honavar,
2006)) otherwise a single interpretation for all O
i
is
enough. Consequently, a number of new axioms must
be introduced to build bridges between the various on-
tologies expressing the points of view. We will not
further explore this issue in this paper.
4.2 The Semantics
To express the semantics of the proposed constructs,
we have to extend slightly the interpretation I =
h∆,πi. ∆ must include the measures (i.e. a couple
(r,u) where r ∈ R and u is a unit), and the strings. π
is extended as follows:
• π(Name) = {x
i
|x
i
∈ String}
• π({... ,o
i
,...}) = {π(o
i
)|o
i
∈ {... ,o
i
,...}}
• π((... ,o
i
,...)) = {π(o
i
)|o
i
∈ {.. .,o
i
,...}}, and
for each o
i
,o
j
such that i < j, π(o
i
) < π(o
j
)
• π(set(C)) = 2
π(C)
• π(range(C, o
1
,o
2
)) = {x
i
|x
i
∈ π(C)∧π(o
1
) 6 x
i
6
π(o
2
)}
• π(rU) = (r,U) where r ∈ R and U is a unit
• π(h... ,C
i
,...i) = {(... ,x
i
,...)|∀i,x
i
∈ π(C
i
)}
• π(∀R.C) = {x
i
|∀y,r
i
∈ π(R).(x
i
,y) ∈ π(r
i
) ⊃ y ∈
π(C)}
• π(∃R.C) = {x
i
|∃y,r
i
∈ π(R).(x
i
,y) ∈ π(r
i
) ∧ y ∈
π(C)}
The resulting semantics is relatively straightforward
and does not introduce anything which does not al-
ready exist in the classical semantics but the strings
and measures as distinguished individuals within ∆.
A noticeable exception is the introduction of a second
order construct.
4.3 Discussion
As a consequence of the new concept constructs, we
extend the set of individuals O with particular names:
rU where r ∈ R and U is a unit depending on the
quantity it is an instance of. This notation can be
easily extended to the colors because colors are well
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
186
standardized now, as well as the currencies using the
norm ISO 4217, or the dates.
It remains to explore what it means for concepts
to have roles. We say that a concept C has a role r if
we have C ⊑ ∀r.D or C ⊑ ∃r.D in the terminological
axioms. In the expressions ∀r.D and ∃r.D, we say that
the role is of type D. Usually, the roles of a concept
are partitioned into two sets: the attributes and the re-
lations. The attributes are the role of which type is a
data type (that we do not use). The relations are all the
other roles. Semantically, we identified the following
distinctions: 1) the attributes are the roles of which
type are qualities, 2) the relations are the roles that
describe topological relations in a broad sense. It can
be geometrical, social or temporal, 3) the mappings
are the roles that give access to a coverage in the geo-
graphical sense of a mapping from individuals into in-
dividuals that are all of the same type. A concept only
with attributes is called a simple concept. It corre-
sponds to the notion of simple feature in OpenGISand
can be mapped very naturally with a database schema.
The relations define semantic graphs. The mappings
can be implemented using a generalized form of cov-
erages.
Semantically, it is assumed that mappings are de-
fined relative to various reference systems. The spec-
ifications of OpenGIS are using such reference sys-
tems for dealing with coordinates in the huge variety
of projection systems (UTM, WSG, etc.). The use of
the ontology indexed notations in modular ontologies
suggests the possibility to unify the concept of local
ontology with the concept of reference system. This
track is being pursued but will not be further elabo-
rated in this paper.
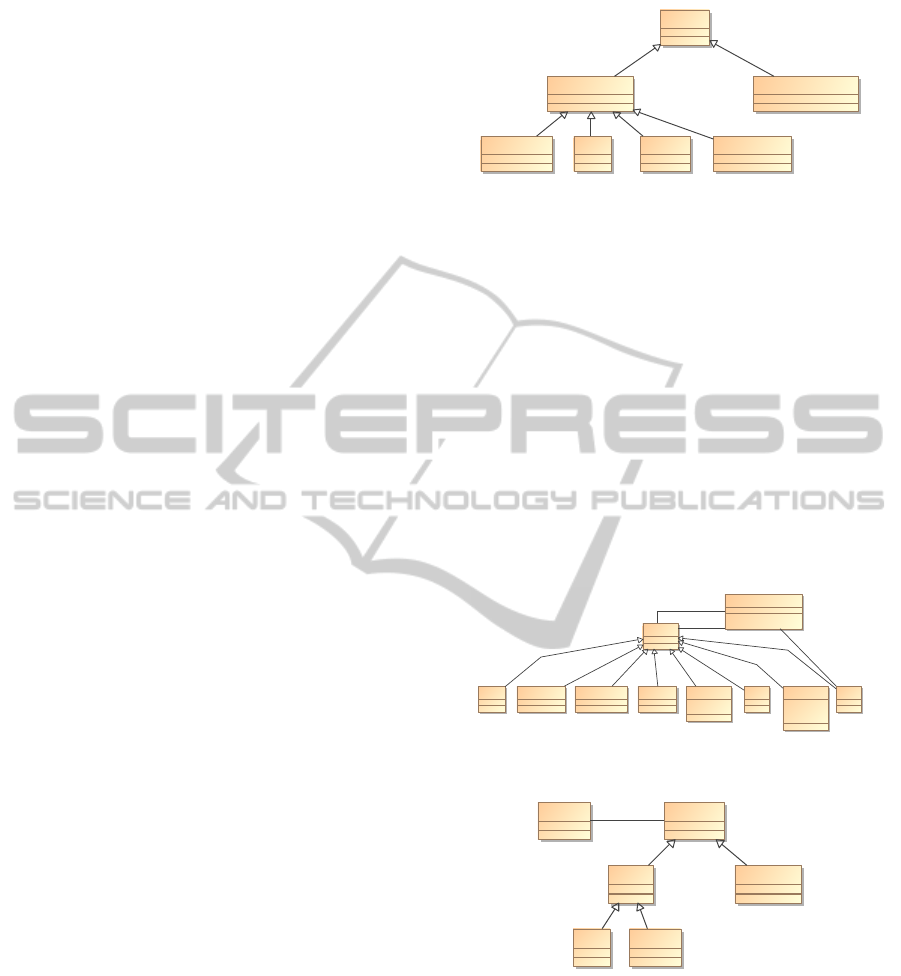
5 IMPLEMENTATION
In this section, we shortly describe the chosen im-
plementation of the ontologies as formalized by the
proposed extension of description logics. For imple-
menting the concepts (see figure 1), we make the dis-
tinction between the quality concepts, the coordinate
concepts and all the others (simply called concepts).
The coordinates are vectors of qualities. Moreover,
the next step is to make them relative to a reference
system, while the qualities are absolute.
Regarding the quantities, we have fully imple-
mented the unit definition mechanisms as described
by the International System of Units, as well as the
possibility to define all the possible quantities. This
implementation is inspired from the jsr-275 attempt
(JScience, 2009). However jsr-275 is defined for
compile time use of quantities and measures. In par-
Version Acad?mique pour Professeur Seulement
CoordinateConceptQualityConcept
NameConceptEnumeration Quantity
Concept
Series
Figure 1: The concept classes.
ticular, the defined quantities are subclasses of the
Quantity class, making the introduction of new quan-
tities difficult. Moreover the access and use of the list
of defined quantities at execution time is impossible.
Consequently, we defined our quantities as instances
of the Quantity class, making it declarative and easily
extensible.
Notice that the derived concepts are not defined in
a separate class because we have chosen to represent
the derivations as relations among concepts. As a con-
sequence, figure 2 shows all the derivations we have
included in our description logic; namely the union,
intersection, complement, inclusion and roles as in
standard description logics, but also the range, set and
mapping.
CoordinateConcept
ComplementIntersection
-roleName
Role
-min
-max
RangeInclusion
Relation
Union Set Map
from
index
to
Figure 2: The relations among concepts.
Coordinate
IndividualConcept
Measure
Quality
Name
instance
Figure 3: The individual classes.
The implementation of the individuals reflects the
particular roles some of the instances have (figure 3).
In particular, the strings, measures and coordinates
are distinguished. Otherwise, as for the concepts, the
relationships among individuals are implemented as
relations implementing the various links (from role
names to individuals and from coordinates to individ-
uals). In the real implementation, the quality class
does not exist because an individual is a quality if it is
an instance of a quality concept.
TOWARDS A DESCRIPTION LOGIC FOR SCIENTIFIC MODELING
187

Additionally, the ontologies introduce name
spaces where the names are linked to the concepts for
the names in C, to the individuals for the names in O
and to the roles for the names in P.
6 CONCLUSIONS
In this paper, we have argued that real world model-
ing with scientists from various disciplines does not
accommodate the use of pure mathematical or pro-
gramming notions like the data types. In particular,
they need to describe the quantities they measure in
the real world using units. Beyond using measures,
the world they are dealing with is not only made of
objects but also of matter and spaces, which, most
of the time, are continuous, bounded or unbounded
entities. Although a semantics of sets, as we have
shown, can accommodate continuity (with continuous
sets) and boundedness (by introducing order and sets
as intervals), there is a need to incorporate the proper
constructs as first class citizens for better expressive-
ness: i.e. the quantities, the coordinates and the map-
pings. This paper has proposed such constructs with
the associated semantics. This proposition, as well as
partly what follows as a perspective, has been imple-
mented as an extension to Mimosa ((Muller, 2010),
http://mimosa.sourceforge.net/).
The immediate perspective is to introduce the ref-
erence systems. In effect, a coordinate is not absolute
but is always relative to a reference system. If two
coordinates are given in two different reference sys-
tems, they must be mapped from one into the other.
OpenGIS has defined the mechanisms for doing so
among geographic coordinates, but these mechanisms
should be extended. Not so surprisingly, in multi-
disciplinary contexts, a terminology is relative to who
is talking as well. Two names in different ontolo-
gies must be mapped from one into the other. Bridge
rules are the mechanisms for doing so as described in
(Jie Bao and Honavar, 2006). What precedes suggests
a possibility to unify this problem of mapping a multi-
plicity of reference systems including the ontologies.
The next step is to extend the set of concept relations
with bridge rules in order to fully implement modular
ontologies.
Another ongoing work is to formulate the Mirana
conceptual model (Aubert et al., 2010) we are cur-
rently working on using the proposed extension. This
would illustrate the expressivity of the proposed de-
scription logic.
ACKNOWLEDGEMENTS
This work has been jointly financed by IRD and
CIRAD.
REFERENCES
Aubert, S., Muller, J.-P., and Ralihalizara, J. (2010). MI-
RANA: a socio-ecological model for assessing sus-
tainability of community-based regulations. In Inter-
national Congress on Environmental Modelling and
Software Modelling for Environment’s Sake, pages 1–
8, Ottawa, Canada.
Belem, M., Bousquet, F., Muller, J.-P., Bazile, D., and
Coulibaly, H. (2011). A participatory modeling
method for multi-points of view description of a sys-
tem from scientist’s perceptions: application in seed
systems modeling in Mali and Chile. In ESSA 2011,
submitted, Montpellier.
Brilhante, V. (2004). An Ontology for Quantities in Ecol-
ogy. In Hutchison, D. and al., editors, SBIA 2004,
pages 144–153, Berlin, Heidelberg. Springer Berlin
Heidelberg.
Collier, N. (2003). Repast: An extensible framework for
agent simulation. The University of Chicago’s Social
Science Research.
Jie Bao, D. C. and Honavar, V. G. (2006). Modular Ontolo-
gies - A Formal Investigation of Semantics and Ex-
pressivity. In The Semantic Web – ASWC 2006, pages
1–16.
JScience (2009). Jscience. http://jscience.org/jsr-275/api/.
Muller, J.-P. (2007). Mimosa: using ontologies for model-
ing and simulation. In Advanced Semantics Technolo-
gies, pages 1–5, Bremen, Germany.
Muller, J.-P. (2010). A framework for integrated modeling
using a knowledge-driven approach. In International
Congress on Environmental Modelling and Software,
pages 1–8, Ottawa, Canada.
Richmond, B. and Peterson, S. (2000). STELLA: An Intro-
duction to Systems Thinking. High Performance Sys-
tems Inc.
Villa, F., Athanasiadis, I. N., and Rizzoli, A. E. (2009).
Modelling with knowledge: A review of emerging se-
mantic approaches to environmental modelling. Envi-
ronmental Modelling & Software, 24:577–587.
Zeigler, B. P., Praehofer, H., and Kim, T. G. (2000). Theory
of modeling & simulation, integrating discrete event &
continuous complex dynamic systems (2nd Ed.). Aca-
demic Press, New York.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
188
