
EXPERIMENTAL RESULTS OF INTEGRAL SLIDING MODE
CONTROLLER FOR A NONHOLONOMIC MOBILE ROBOT
Alaa Dib and Houria Siguerdidjane
SUPELEC, Systems Sciences (E3S), 91192, Gif-sur-Yvette cedex, France
Keywords:
Mobile Robot, Trajectory Tracking, Integral Sliding Mode, Nonholonomic systems.
Abstract:
This paper addresses the trajectory tracking problem of a nonholonomic mobile robot. More precisely, we are
interested in solving the problem of tracking a reference trajectory in presence of disturbances. A control strat-
egy based on the Integral Sliding Mode is proposed combined with a state feedback linearization. While many
studies have considered the kinematic model of the vehicle only, we have used both kinematic and dynamic
models. The distinctive property of the proposed controller is its robustness of performance in the presence
of uncertainties. To assess the quality of the proposed approach, we performed in addition to simulations the
implementation of this controller on the robot Koala, a two-wheel differentially driven mobile robot. Lab work
illustrates the real quality and efficiency of this control strategy.
1 INTRODUCTION
The motion control of mechanical systems under non-
holonomic constraints has received much attention
during past years. Wheeled mobile robots and car-
like vehicles are typical examples of such systems. As
pointed out in an early paper of Brockett (Brockett,
1983), such control systems cannot be stabilized by
continuously differentiable, time invariant, state feed-
back control laws. Another difficulty in controlling
nonholonomic mobile robots is that in the real world
there are uncertainties in their modeling. Taking into
account intrinsic characteristics of mobile robots such
as actual vehicle dynamics, inertia and power limits of
actuators and localization errors, their dynamic equa-
tions could not be described as a simplified mathemat-
ical model. This has attracted interest of researchers
to the problem of nonholonomic mobile robot con-
trol. Discontinuous state feedback controller is used
(Astolfi, 1995), (Astolfi, 1996)), tracking control us-
ing direct Lyapunov method (D’Andrea-Novel et al.,
1995), time variant state feedback (Samson, 1995),
(Walsh et al., 1994). Stabilization and control of non-
holonomic systems with dynamic equations are pre-
sented in (Bloch et al., 1992), backstepping based
methods has been considered in several papers (Fierro
and Lewis, 1997), (Jiang and Nijmeijer, 1997), (Tan-
ner and Kyriakopoulos, 2002) and a switched finite-
time control algorithm has been proposed in (Banavar
and Sankaranarayanan, 2006).
Sliding mode control has been applied to the tra-
jectory control of robot manipulators (Slotine and
Sastry, 1983), (Yeung and Chen, 1988), and is receiv-
ing increasing attention from researches on control
of nonholonomic systems with uncertainties. For ex-
ample, in (Guldner and Utkin, 1994) a sliding mode
control was used to guarantee exact tracking of tra-
jectories made by navigation functions. In (Yang and
Kim, 1999) a sliding mode control law is proposed for
asymptotically stabilizing the mobile robot to a de-
sired trajectory, where robot posture was represented
using polar coordinates. The benefits of the sliding
mode command which makes it very important is its
robustness with regards to disturbances and structural
uncertainties, i. e. the system response depends on the
gradient of the sliding surface and remains insensitive
to variations of system parameters and external distur-
bances. However, during the reaching phase (before
Sliding Mode occurs), the system has no such insen-
sitivity property; therefore, insensitivity cannot be en-
sured throughout an entire response. The robustness
during the reaching phase is normally improved by
high-gain feedback control. Stability problems that
arise inevitably limit the application of such high-gain
feedback control schemes.
In this paper, we propose to perform a feedback
linearization for a class of nonholonomic dynamic
systems, combined with an Integral Sliding Mode
controller which concentrates on the robustness of the
motion in the whole state space. The order of the mo-
tion equation in this type of Sliding Mode is equal
to the dimension of the state space. Therefore, the
robustness of the system can be guaranteed through-
out an entire response of the system starting from the
445
Dib A. and Siguerdidjane H..
EXPERIMENTAL RESULTS OF INTEGRAL SLIDING MODE CONTROLLER FOR A NONHOLONOMIC MOBILE ROBOT.
DOI: 10.5220/0003648904450450
In Proceedings of the 8th International Conference on Informatics in Control, Automation and Robotics (MORAS-2011), pages 445-450
ISBN: 978-989-8425-75-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

initial time instance (Utkin and Shi, 1996). To as-
sess the efficiency of this approach, the performance
of the proposed controller has been compared to a tra-
ditional PID controller.
This paper is organized as follows. In Section
2, the general dynamic model of nonholonomic sys-
tems is presented. Feedback linearization is discussed
in Section 3. In Section 4 the main result of Inte-
gral Sliding Mode is introduced, and its application to
solve the tracking problem is discussed in Section 5.
Finally in Section 6, experimental results using Koala
mobile robot are discussed, before presenting the con-
cluding remarks in Section 7.
2 MODELLING
The dynamical model of a nonholonomic system is
expressed as (see (Campion et al., 1991b) for details)
M(q)
¨
q+ f(q,
˙
q) = B(q)τ+ A(q)λ
A
T
(q)
˙
q = 0
(1)
where q ∈ R
n
is an n-vector of generalized configu-
ration variables, M(q) ∈ R
n×n
is a positive definite
symetric inertia matrix, f(q,
˙
q) ∈ R
n
denotes the fric-
tion vector, A
T
(q) ∈ R
m×n
is the matrix associated
with nonholonmic constraints, λ ∈ R
m×1
is a vector
of Lagrange multipliers and B(q)τ ∈ R
n
is the set of
generalized forces applied to the system. As shown
in (Campion et al., 1991b) it can be written in state
space form as
˙
q = G(q)v
J(q)
˙
v+ m(q, v) = G
T
(q)B(q)τ
(2)
where v ∈ R
m
is the vector of pseudo-velocities and
we have
˙
q = G(q)v, where G(q) is a matrix whose
columns are a basis for the null space of A
T
(q), so
that A
T
(q)G(q) = 0 and we have
J(q) = G
T
(q)M(q)G(q)
m(q, v) = G
T
(q)M(q)
˙
G(q) + G
T
(q)f(q,
˙
q)
(3)
Under the assumption that det(G
T
(q)B(q)) 6= 0, it
is possible to perform a partial linearization via feed-
back on (2) by letting
τ =
G
T
(q)B(q)
−1
(J(q)u+ m(q, v)) (4)
where u ∈ R
m
is the pesudo-acceleration vector. The
resulting system is then
˙
q = G(q)v
˙
v = u
(5)
By defining the state q
g
= (q, v), system (5) can
be expressed as
˙
q
g
=
G(q
g
)v
0
+
0
I
u (6)
which is known as the second-order kinematic model
of the constrained mechanical system.
The following two properties of the system (6)
have been established in (Campion et al., 1991a)
• The nonholonomic system (6) is controllable.
• The equilibrium point x
∗
= 0 of the nonholonomic
system (6) can be made Lagrange stable, but can
not be made asymptotically stable by a smooth
state feedback.
3 REVIEW OF FEEDBACK
LINEARIZATION
For the reader convenience, let’s review feedback lin-
earization as shown in (Campion et al., 1991b). For a
nonholonomic system with n degrees of freedom and
n− m actuators, there exists an output vector function
y = h(q) and a static state feedback control u(q, v)
such that the closed loop is stable, and the output
y = h(q) asymptotically converges to zero. This can
be achieved by feedback linearization.
We start by choosing the output function
y =
y
1
y
2
.
.
.
y
n−m
(7)
which depends on the configuration state variable q
only, but not on the state v, such that the largest lin-
earizable subsystem is obtained by differentiating this
output function as follows
˙
y = ▽
q
h(q)
˙
q
= ▽
q
h(q)G(q)v
(8)
By differentiating again, one may write
¨
y = F(q, v) + D(q)u (9)
where
F(q, v) =
∂
∂q
[▽
q
h(q)G(q)v]G(q)v (10)
D(q) = ▽
q
h(q)G(q) (11)
By choosing h(q) in such a way that the matrix
D(q) is nonsingular for all q, then linearization is
achieved by the following feedback control
u = D
−1
(q)(z− F(q, v)) (12)
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
446
where z ∈ R
n−m
is the new external control input.
And the resulting system is
¨
y = z (13)
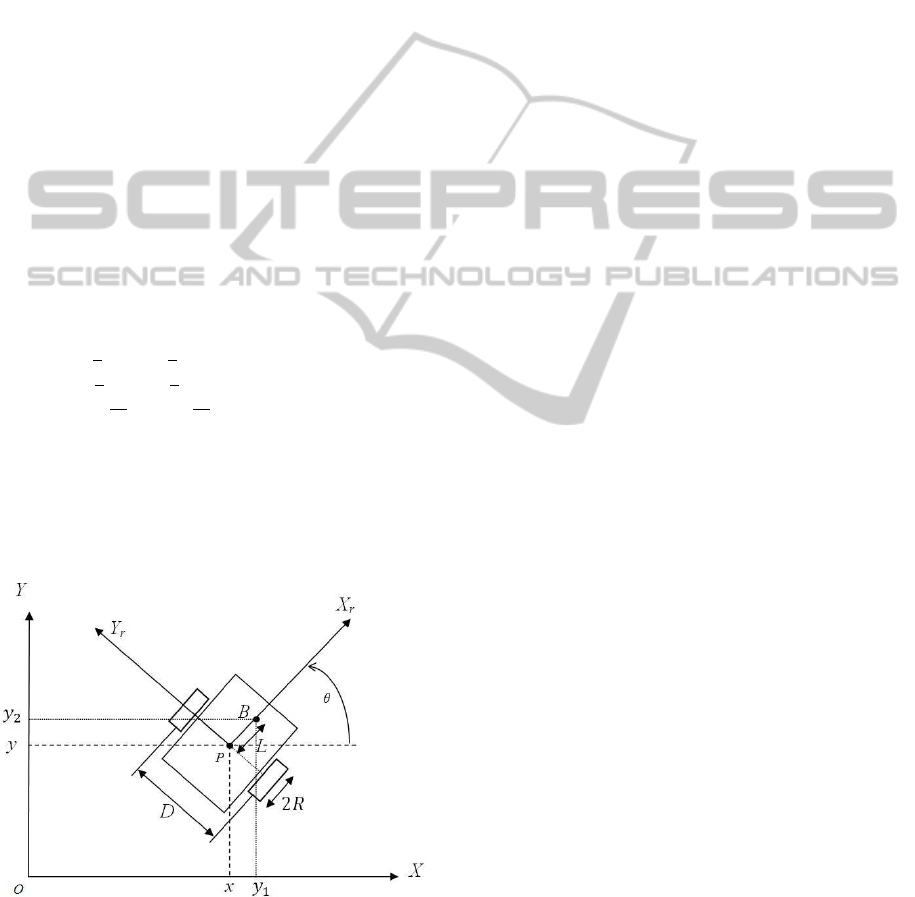
Let’s consider a wheeled mobile robot (WMR)
that is moving on a horizontal plane as shown in Fig.
1. The robot has two independently driven wheels
on a single common axle. The centre of mass of the
robot is located in P(x, y), which is the origin of the
local coordinate frame that is attached to the robot
body and is located on the wheels’ axis. The point
B(x
L
, y
L
) is a virtual reference point on x axis of the
local frame at a distance L (lookahead distance) of P.
If the generalized coordinates vector is selected to be
q = [x y θ]
T
, one velocity constraint is obtained as
xsinθ − ycosθ = 0. Thus, we define the vector v of
the nonholonomic robot as v = [v ω]
T
, with v and ω
denote the linear and angular velocities of the robot,
respectively.
The dynamical equations of the mobile can be ex-
pressed in the matrix form (1) where
M(q) =
m 0 0
0 m 0
0 0 I
f(q,
˙
q) = 0
B(q) =
1
R
cosθ
1
R
cosθ
1
R
sinθ
1
R
sinθ
D
2R
−
D
2R
A(q) =
sinθ
−cosθ
0
λ = −mvω
input-output linearizability is guaranteed through
this choice of output function
y = h(q) = [x+ Lcosθ y + Lsinθ]
T
(14)
with L 6= 0.
Figure 1: Unicycle mobile robot.
For the sake of completeness, in the next section
we briefly present the major result of Integral Sliding
mode technique presented in (Utkin and Shi, 1996).
4 INTEGRAL SLIDING MODE
For a given dynamic system represented by the fol-
lowing state space equation
˙x = f(x) + B(x)u (15)
where x ∈ R
n
, u ∈ R
m
, we suppose that there exists
a feedback control law u = u
0
(x), such that system
(15) can be stabilized in a desired way (e.g. its state
trajectory follows a reference trajectory with a given
accuracy). We denote this ideal closed loop system as
˙x
∗
= f(x) + B(x)u
0
(16)
where x
∗
denotes the state trajectory of the ideal sys-
tem under control u
0
. However, systems like (15)
are normally operating under some uncertainty condi-
tions that may be generated by parameter variations,
unmodeled dynamics and external disturbances etc.
Under this consideration a real control system may be
summarized with
˙x = f(x) + B(x)u+ h
d
(x, t) (17)
in which function h
d
(x, t) represents the whole per-
turbation described above and we assume that it is
bounded and fulfills the uncertainty matching condi-
tion, in other words
h
d
(x, t) = B(x)u
h
u
h
∈ R
m
(18)
For system (16), firstly, we design a control like
u = u
0
+ u
1
(19)
where u
0
is the ideal control defined in (16) and u
1
is
designed to be discontinuous for rejecting the pertur-
bation term h
d
(x, t). Secondly, we design our switch-
ing function s as
s = s
0
(x) + µ (20)
with s, s
0
(x), µ ∈ R
m
.
This switching function consists of two parts; the
first part s
0
(x) may be designed as the linear combina-
tion of the system states (similar to the conventional
Sliding Mode design); and, the second part µ induces
the integral term and will be determined below.
To derive the Sliding Mode equation, the time
derivative of s on the system trajectories should be
made equal to zero; the differential equation ˙s = 0
should be solved with respect to control input and
the solution u
eq
referred to as the Equivalent Control
should be substituted into the motion equation for u
(Utkin, 1992).
The control philosophy is to design an integral
feedback such that the Equivalent Control is
u
1eq
= −u
h
(21)
EXPERIMENTAL RESULTS OF INTEGRAL SLIDING MODE CONTROLLER FOR A NONHOLONOMIC MOBILE
ROBOT
447
Condition (21) holds if
˙µ =
∂s
0
∂x
( f(x) + B(x)u
0
)
µ(0) = −s
0
(x(0))
(22)
where µ(0) is determined based on the require-
ment s(0) = 0 (Sliding Mode occurs starting from the
initial time) . The motion equation of the system in
Sliding Mode will be ideal system (16).
5 TRAJECTORY TRACKING
Given a smooth bounded reference trajectory
y
d
(t) = h(q
d
(t)) (23)
which is generated by a trajectory generator which
satisfies nonholonomic constraints, then the track-
ing control problem is to design a feedback control
law for linearized system (13) with output equation
y(t) = h(q(t)) such that the tracking error
e(t) = y(t) − y
d
(t) (24)
is bounded and asymptotically tends to zero. By dif-
ferentiating (24) twice, one may write using (13)
¨
e =
¨
y−
¨
y
d
= z−
¨
y
d
+ h
d
(e, t)
(25)
By applying the algorithm of previous section, we
need to design control z as stated in equation (19):
z = z
0
+ z
1
, where z
0
is predetermined such that sys-
tem x = z
0
, follows a given trajectory with satisfac-
tory accuracy. For example, z
0
, may be obtained
through linear feedback control, like z
0
= −k
T
x +
¨
y
d
, k ∈ R
(n−m)×1
in which gain vector k can be deter-
mined by Pole Placement or Linear Quadratic Regu-
lator (LQR) methods.
We continue by designing the sliding surface
s = c
T
x+ µ (26)
˙µ = −c
T
(z
0
) (27)
µ(0) = −c
T
x(0) (28)
in that case the motion equation of the Sliding Mode
coincides with that of the ideal system x
i
= z
0
, with-
out perturbation. Further more, since s(0) = c
T
x +
µ(0) = 0, Sliding Mode will occur from the initial
time t = 0. The second part of the control i.e. µ
1
can be designed as following where m
0
(x) ≥ |h
0
|.
The Sliding Mode can be then enforced using the
control
z
1
= −M(x)sign(s) (29)
where M(x) is positivedefinite diagonal matrix, under
the condition that matrix
∂s
0
∂x
B(x) is definite and the
elements of matrix M(x) are large enough.
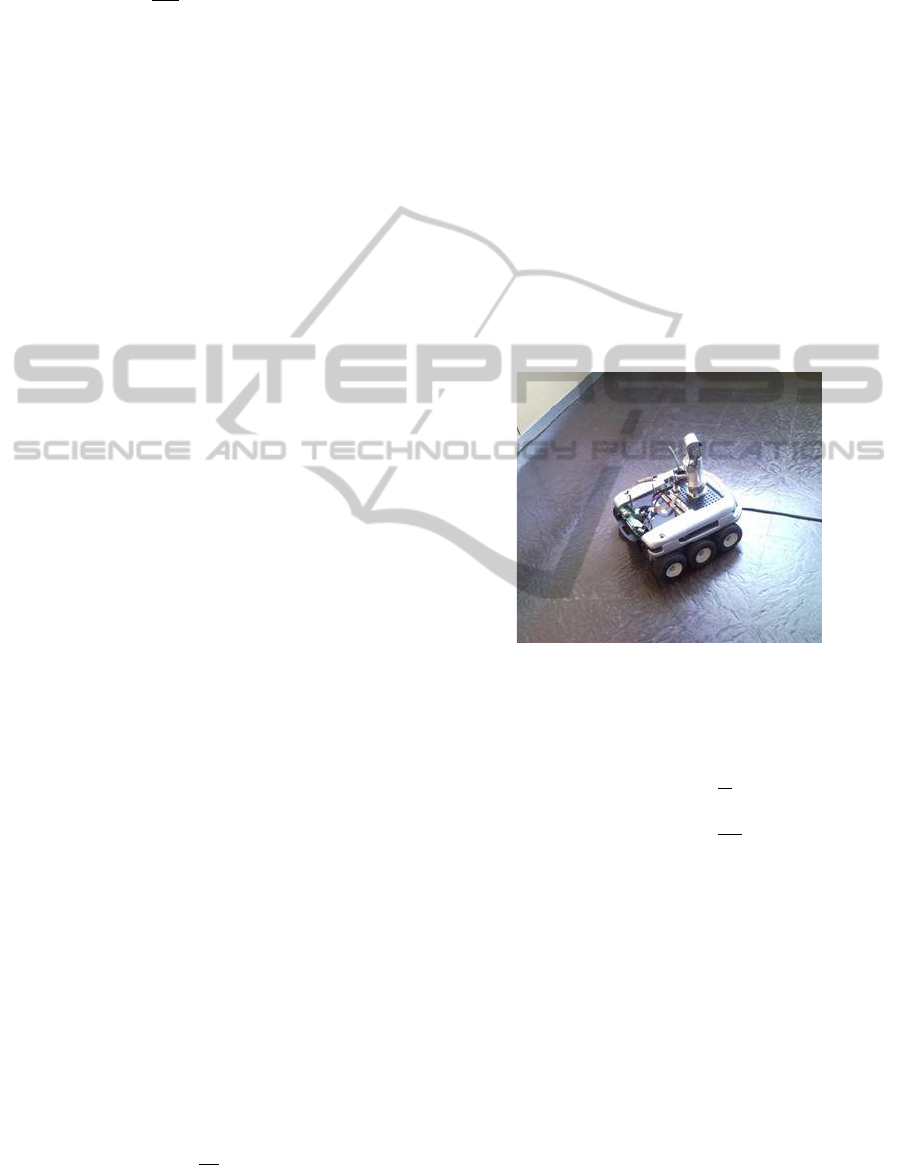
6 EXPERIMENTAL RESULTS
In our experiments, we used the wheeled robot Koala
illustrated in Fig. 2. Koala is a mid-size robot de-
signed for real-world applications. Koala has the
functionality necessary for use in practical applica-
tions, rides on 6 wheels for indoor operations. It
has two-motorized wheels (the middle wheel of each
side), with 0.4 m/s maximum speed, the wheels have
a radius of 4.5 cm and are mounted on an axle 30 cm
long. The chassis of the robot measures 30x30x20
cm (l/w/h) and its total weight is 3.6 kg. Each mo-
tor is equipped with an incremental encoder counting
5850 pulses/turn. The robot is equipped with 16 Infra-
red proximity and ambient light sensors in addition to
a camera mounted on a turret. Data acquisition and
control implementation are performedat sampling pe-
riod T
s
= 0.05 s.
Figure 2: Mobile robot Koala.
In this section, we will report the experimental re-
sults of Koala in tracking an eight shape reference tra-
jectory defined by
y
d1
(t) = y
d1max
sin(2π
t
T
) + y
d1i
y
d2
(t) = y
d2max
sin(2π
t
2T
) + y
d2i
(30)
for t ∈ [0, 2T]. We choose y
d1max
= 2m, y
d2max
= 2m,
(y
d1i
, y
d2i
) = (1.0, 0.0) and T = 40s.
We apply feedback linearization discussed above,
we let q(0) = (0m, 0m, 0rad), i.e., starting with an
initial state error with respect to the assigned trajec-
tory q
d
(0) = (1.0m, 0.0m, 0.4636rad). In the first
set of experiments, PID controller is applied with
k
p
= 9.17,k
i
= 0.72 and k
d
= 10.59. As we can see
from Figs. 3, a relatively high tracking errors (up to
10.0 cm) are observed on x, y. These tracking errors
are resulting from unmodeled dynamics (motors dy-
namics and unmodeled friction forces) and measure-
ments errors. In addition, there is a large transient
error resulting from the initial posture being different
from the desired trajectory starting point.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
448
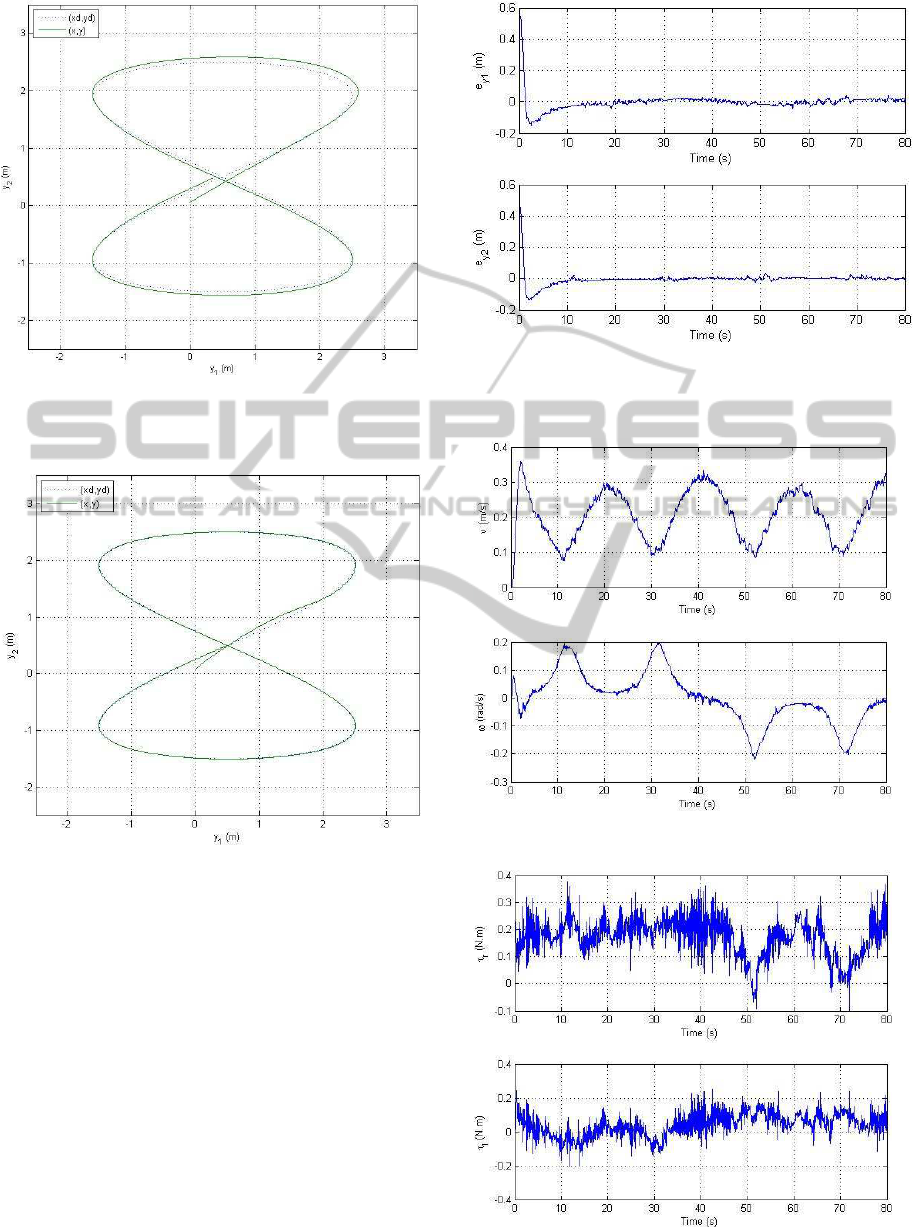
Figure 3: Asymptotic trajectory tracking using linear PID
controller to track an eight shape trajectory on the (x, y)
plane.
Figure 4: Asymptotic trajectory tracking using Integral
Sliding Mode controller of an eight shape trajectory on the
(x, y) plane.
In the second set of experiments, we add Integral
Sliding Mode controller as described in Section 5. As
we can see from Figs. 4 and 5, the tracking of the
reference trajectory is quite accurate. Residual errors
(1 cm Maximum) are mainly due to quantization and
discretization of velocity commands. Figs. 6 and 7
show resulting linear and angular velocities and the
applied torques respectiveley.
7 CONCLUSIONS
In this paper, a control strategy was proposed to
Figure 5: Output tracking errors using Integral Sliding
Mode controller of an eight shape trajectory on the (x, y)
plane.
Figure 6: Linear and angular velocities.
Figure 7: Applied torques.
EXPERIMENTAL RESULTS OF INTEGRAL SLIDING MODE CONTROLLER FOR A NONHOLONOMIC MOBILE
ROBOT
449

solve the trajectory tracking problem of nonholo-
nomic robotic systems in presence of external distur-
bances and parametric uncertainties. This strategy is
based on Integral Sliding Mode combined with state
feedback linearization technique that is extended to
include both kinematic and dynamic models. Exper-
imental results on a nonoholonomic mobile robot as
a case study have shown that this combination can
effectively stabilize the robot about a reference tra-
jectory, and the results are much better in terms of
robustness when compared to a traditional linear PID
controller.
REFERENCES
Astolfi, A. (1995). Exponential stabilization of a car-like
vehicle. In Robotics and Automation, 1995. Proceed-
ings., 1995 IEEE International Conference on. IEEE.
Astolfi, A. (1996). Discontinuous control of nonholonomic
systems. Systems & Control Letters, 27(1):37–45.
Banavar, R. and Sankaranarayanan, V. (2006). Switched fi-
nite time control of a class of underactuated systems.
Springer.
Bloch, A., Reyhanoglu, M., and McClamroch, N. (1992).
Control and stabilization of nonholonomic dynamic
systems. IEEE Transactions on Automatic Control,
37(11):1746–1757.
Brockett, R. (1983). Asymptotic stability and feedback sta-
bilization.
Campion, G., d’Andrea Novel, B., and Bastin, G. (1991a).
Controllability and state Feedback stabilizability of
non holonomic mechanical systems. Advanced robot
control, pages 106–124.
Campion, G., d’Andrea Novel, B., and Bastin, G. (1991b).
Modelling and state feedback control of nonholo-
nomic mechanical systems. In Proceedings of the 30th
IEEE Conference on Decision and Control, volume 2,
pages 1184–1189.
D’Andrea-Novel, B., Campion, G., and Bastin, G. (1995).
Control of wheeled mobile robots not satisfying ideal
velocity constraints: A singular perturbation ap-
proach. International Journal of Robust and Nonlin-
ear Control, 5:243–267.
Fierro, R. and Lewis, F. (1997). Control of a nonholomic
mobile robot: Backstepping kinematics into dynam-
ics. Journal of Robotic Systems, 14(3):149–163.
Guldner, J. and Utkin, V. (1994). Stabilization of non-
holonomic mobile robots using Lyapunov functions
for navigation and sliding mode control. In Proceed-
ings of the 33rd IEEE Conference on Decision and
Control, volume 3, pages 2967–2972. IEEE.
Jiang, Z. and Nijmeijer, H. (1997). Tracking control of mo-
bile robots: a case study in backstepping. Automatica,
33(7):1393–1399.
Samson, C. (1995). Control of chained systems application
to path following and time-varying point-stabilization
of mobile robots. Automatic Control, IEEE Transac-
tions on, 40(1):64–77.
Slotine, J. and Sastry, S. (1983). Tracking control of non-
linear systems using sliding surfaces, with application
to robot manipulators. International Journal of Con-
trol, 38(2):465–492.
Tanner, H. and Kyriakopoulos, K. (2002). Discontinuous
backstepping for stabilization of nonholonomic mo-
bile robots. In Proceedings- IEEE International Con-
ference on Robotics and Automation, volume 4, pages
3948–3953. Citeseer.
Utkin, V. (1992). Sliding modes in control and optimization,
volume 3. Springer-Verlag Berlin.
Utkin, V. and Shi, J. (1996). Integral sliding mode in sys-
tems operating under uncertainty conditions. In Pro-
ceedings of the 35th IEEE on Decision and Control,
volume 4, pages 4591–4596. IEEE.
Walsh, G., Tilbury, D., Sastry, S., Murray, R., and Lau-
mond, J. (1994). Stabilization of trajectories for sys-
tems with nonholonomic constraints. IEEE Transac-
tions on Automatic Control, 39(1):216–222.
Yang, J. and Kim, J. (1999). Sliding mode control for
trajectory tracking of nonholonomic wheeled mobile
robots. IEEE Transactions on Robotics and Automa-
tion, 15(3):578–587.
Yeung, K. and Chen, Y. (1988). A new controller design
for manipulators using the theory of variable structure
systems. IEEE Transactions on Automatic Control,
33(2):200–206.
ICINCO 2011 - 8th International Conference on Informatics in Control, Automation and Robotics
450
