
EXPERIMENTAL COMPARISON OF SELECTED TYPES
OF PARALLEL EVOLUTIONARY ALGORITHMS
Ivan Sekaj, Marek Linder and Daniel Pernecký
Institute of Control and Industrial Informatics, Faculty of Electrical Engineering and Information Technology
Slovak University of Technology, Ilkovičova 3, 812 19, Bratislava, Slovak Republic
Keywords: Evolutionary Algorithm, Genetic Algorithm, Parallelisation, Architecture, Migration, Overlapping,
Experimental Comparison.
Abstract: Parallel evolutionary algorithms are able to improve the performance of simple evolutionary algorithms
which use a single population. Their characteristics and performance depend on their architectures and other
factors and parameters. In our contribution we present some viewpoints of classification and we
demonstrate experimentally the influence of selected factors such as architecture type, migration topology,
migration period, number of migrants, numbers of subpopulations, subpopulation size and others on the
performance of these algorithms. This experimental study should help to generalise the properties and
behaviour of various types of parallel evolutionary algorithms and help to design algorithms for solving
hard search/optimisation problems like modelling of bio-medicine processes, optimisation of
pharmaceutical dosing, optimisation of large technological and construction tasks etc.
1 INTRODUCTION
Parallel evolutionary algorithms (PEA) or parallel
genetic algorithms (PGA) are evolutionary
algorithms, which consist at least of two levels of
parallelisation. The first level contain most types of
evolutionary algorithms thanks their population
based nature. Each individual represents a trajectory
in the search space. The main drawback of the
simple or single-population algorithms is the high
computation effort or time needed to find the
solution. The next drawback is that simple
evolutionary algorithms are often unable to avoid the
premature convergence, which is the stagnation in
the local optimum. To prevent these drawbacks a
next level of parallelisation using multiple
populations can be used.
Several authors used various types of PEA and
several authors published various classifications of
PEA or PGA (Alba, 2002, Cantú-Paz, 1995,
Nowostawski, 1999 and others). The PEA, aside
from the number of computation units used
(processors, computers), bring also other advantages
in comparison to simple (single-population)
evolutionary algorithms (SEA) or simple genetic
algorithms (SGA). These advantages are multi-
parallel search in a large, multidimensional search
space, higher diversity of the population, better
algorithm control possibilities, higher computation
power, etc. If we are able to design efficient
architectures of PEA and to find their good
parameters, the PEA will reach better solutions,
avoid premature convergence and reduce time,
which is needed to find the solution in comparison to
SEA. Additionally, if using multiple computation
units the computation power is growing sub linearly.
All together, PEA result in a significant performance
increase.
In this contribution some viewpoints of PEA
classification are described. But the goal of this
paper is an experimental comparison of selected
PGA representatives and analysis of the influence of
selected PEA parameters on their performance. Our
attention was focused to island-based migration-type
PGA, island-based overlapping-type PGA and
cellular PGA. We analysed the influence of PGA
architecture, migration topology, migration period,
number of migrants, number of subpopulations,
subpopulation size and some other factors on the
performance.
2 CLASSIFICATION OF PEA
Let us consider following viewpoints of PEA
classification. The first is the number of computation
296
Sekaj I., Linder M. and Pernecký D..
EXPERIMENTAL COMPARISON OF SELECTED TYPES OF PARALLEL EVOLUTIONARY ALGORITHMS.
DOI: 10.5220/0003655402960302
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2011), pages 296-302
ISBN: 978-989-8425-83-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

units used, the second is the granularity or the
number of subpopulations and their size and the
third viewpoint is the type of information exchange
between subpopulations of the PEA.
2.1 Number of Computation Units
The first question is how much computation units
are used for the PEA realisation. This is a technical
aspect, which influences computation time, but not
the algorithm as such or the number of the total
fitness function evaluations of the entire PEA
needed for finding a good result. Using N-
computation units (processors, computers) we are
able to speed up the computation power nearly N-
times. The use of multiprocessor configurations
distributes the computation load to more processing
nodes. The simplest computational topology uses
only a single population and the algorithm manager
distributes the fitness function evaluation (or
sometimes also the crossover and mutation) to other
free processors. Such topology is called global or
master-slave. The only communication is the request
for the fitness calculation in one direction and than
the computed fitness value in the other direction.
This topology can by an extensive way save
computation time, but it is not able to decrease the
number of fitness function evaluations.
2.2 Granularity of the PEA
The most obvious viewpoint of PEA (PGA)
classification is the PEA granularity which divide
PEA to coarse-grained and fine-grained ones
(Cantú-Paz, 1995).
Figure 1: Migration-based coarse-grained PEA.
Coarse-grained PEA consist of relatively small
number of relatively large subpopulations (islands)
(Fig.1, Fig.2). The use of coarse-grained PEA
topologies is advantageous when information
combination of individuals from partially isolated
subpopulations can produce new perspective search
directions or even solutions. Many authors have
presented coarse-gained PGA or island models in
literature e.g. (Lin, 1994, Whitley, 1999, Cantú-Paz,
1999, Skolicki, 2005) and others.
In case of fine-grained PGA many islands with a
small number of individuals are considered. The
Figure 2: Overlapping-based coarse-grained PEA.
outermost but also the most obvious case is when
each island is represented only by a single
individual. Such topology is called also cellular
(Fig.3) (Giacobini, 2005 and others).
The hybrid topologies are the last case of PEA,
which represent various combinations of fine- and
coarse-grained PEA.
Figure 3: Fine-grained cellular PEA.
2.3 Information Exchange in PGA
The last viewpoint of PGA classification discussed
is the information exchange between the
subpopulations. Here let us distinguish migration,
individual sharing and diffusion. The islands in the
coarse-grained PEA interchange the genetic
information either using the migration operator or
sharing some individuals in overlapping areas of
more subpopulations. Migration is performed by
copying of selected individuals from the source
island to the target island according to defined
migration connections (for example as described in
Fig.1). The migration is performed in defined
periodic time intervals or non-periodically when
some predefined conditions are fulfilled. The correct
selection of migration periods should ensure that
each island has sufficient time for isolated evolution
of their individuals and for producing perspective
genetic information. Block scheme of such
algorithm is in Fig.4. In the overlapping topology,
selected number of individuals belongs to more
subpopulations; they can be selected as parents and
crossed over with individuals of other
subpopulations (Fig.2). Finally, in the cellular fine-
grained PEA the genetic information is exchanged
s
ub
p
o
p
ulation
A
s
ub
p
o
p
ulation B
s
ub
p
o
p
ulation
N
single
individual
EXPERIMENTAL COMPARISON OF SELECTED TYPES OF PARALLEL EVOLUTIONARY ALGORITHMS
297

due to crossover of each individual of the population
with a selected neighbour. The individuals are
geometrically organised in a 2-D or 3-D grid. The
information motion here imitates diffusion.
Figure 4: Block scheme of a migration-based PEA with
multiple subpopulations and migrations between them.
3 USED PGA CONFIGURATIONS
In our experimental analysis three types of PGA
topology have been considered: 1. migration-type
coarse-grained, 2. overlapping-type coarse-grained
and 3. cellular fine-grained. The influence of
selected parameters have been analysed and the
performance of selected PGA configurations have
been compared on the example of minimisation of
the Eggholder function. Note, that during this project
other test function has been tested and a very large
number of experiments was performed.
3.1 Coarse-grained PGA with
Migration
We have used various migration-based PGA
topologies with communication between islands
according to Fig.5 A-G (Sekaj, 2004, Sekaj, 2007).
Each arrow represents a migration direction. When
not explicitly indicated, nine islands were used, each
island consists of 64 individuals and the number of
all individuals in the PGA was 9x64=576. The
following genetic algorithm is running in each
island:
1. Population initialisation (by random) and fitness
calculation.
2. Selection of 4 the best individuals, which are
without any change copied into the new population.
Random selection of a group of 20 individuals,
which are copied without any change into the new
population. Selection of 40 parents using the
tournament selection method.
3. Mutation (rate=0.1) and crossover (rate =0.7) of
parents.
4. Completion of the new population.
5. Fitness calculation.
6. Test of terminating condition, if not fulfilled, then
jump to the Step 2.
The best-random migration policy is used, that is the
best individual from the source island is copied and
it replaces a randomly selected individual in the
target island.
Figure 5: Coarse-grained migration-based PGA topologies
used in our experiments.
3.2 Coarse-grained PGA with
Overlapping areas
This architecture contains overlapping areas where
some individuals belong to more subpopulations and
the information interchange between them is
provided only by crossover (Fig.6). No migration
between islands is provided. However, the
evolutionary algorithm used is the same as in the
previous architecture.
Figure 6: Coarse-grained overlapping-based PGA
topology.
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
298

3.3 Fine-grained PGA
In the considered fine-grained cellular topologies
each node represents a single individual (Sekaj,
2009).
There are 24 rows and 24 columns, together
576 individuals (Fig.7). Two types of the fine-
grained PGA algorithms have been considered. In
each generation we selected one neighbour of 4 or 8
possible neighbour candidates (Fig.7 left and right,
respectively) for each original individual of the
population using tournament selection. These two
individuals are crossed over and two new children
are produced. If one of the two children is better
than the original individual, it replaces it. But the
population is updated (the old individuals are
replaced) as late as the last individual of the PGA is
crossed over. Two alternatives were used for
mutation. In the first case the crossed over children
are mutated and then the best individual is chosen to
replace the original individual. In the second case all
individuals are crossed over, replaced and then the
entire population is mutated with the mutation rate
0.1.
Figure 7: Neighbour selection in cellular PGA topologies.
Each island is a single individual.
4 EXPERIMENTAL RESULTS
4.1 Test Function
For all experiments the Eggholder function of 10
variables has been used. It is in form
(1)
-500 ≤ x
i
≤500
The position of the global optimum is unknown.
Graph of this function with two variables is in Fig.8
Figure 8: Graph of the Eggholder function with 2
variables.
4.2 Experimental Results
The goal was to perform an experimental analysis of
the above described PGA architectures and to find
the important factors, which have positive influence
on their performance. We have analysed and
compared the influence of the PGA type and its
topology, migration period length, number of
individuals migrated, number of islands and
population size on the convergence rate. Each graph
in the depicted figures represents the mean value of
30 runs of the corresponding PGA.
In the first experiment the topology B with 9
islands (Fig.5B) is considered. The influence of
changing migration period is analyzed (Fig.9).
Migration period from 1 to 100 generations has been
compared. The best performance was obtained with
migration period between 20 and 100 generation.
When shorter migration periods, from 1 to 10
generation, were used the PGA starts to behave
similar as the single population GA (SGA) because
of frequent information exchange between the
islands. Such results were worst than the PGA
without migration (marked - No migration). In the
SGA and in PGA with intensive migration the
algorithm is predisposed to premature convergence.
This is because the currently best individuals which
direct to local optima, can influence the entire
population i.e. influence other subpopulations to
premature convergence before they are able to
evolve perspective genes or building blocs
respectively.
.
.
.
.
EXPERIMENTAL COMPARISON OF SELECTED TYPES OF PARALLEL EVOLUTIONARY ALGORITHMS
299

1000 2000 3000 4000 5000
-8000
-7800
-7600
-7400
-7200
-7000
-6800
-6600
-6400
generation
Fitness
SGA
T=1
T=5
T=10
No migration
T=100
T=20
T=50
Type B, Changing migration period
Test function 1
Figure 9: The influence of changing migration period.
Next, the influence of changing the number of
islands is compared. Fig.10 depicts results reached
with 5 to 25 islands. Number of individuals in each
island is 50. The number of all individuals in the
PGA is not constant. It is Nx50, where N is the
number of islands. For objective comparison the
number of fitness function evaluations instead of
number of generations is used on the horizontal
axes. The best result was obtained with 25 islands.
The next experiments (Fig.11 and Fig.12) show that
for the Eggholder function with 10 variables the
optimal number of islands is between 9 and 25 with
subpopulation size from 50 to 100 individuals.
1 2 3 4 5 6 7 8 9
x 10
4
-8200
-8000
-7800
-7600
-7400
-7200
-7000
No. of fitness evaluation
Fitness
SGA
5
9
16
25
Type B, Changing number of subpopulations
Test function 1
Figure 10: The influence of changing number of islands.
Figure 11: Number of islands / population size.
Figure 12: Number of islands / population size.
In Fig.13 various topologies of migration
connections (according Fig.5) have been compared.
In case of the Eggholder function the topologies A,
B and C shows faster convergence rate. However, in
general we assume that the migration connection
topology has not a significant influence on the PGA
performance. Note, that this can change, if we
consider PGA with "heterogeneous" structure i.e.
when various parameters of GA are used in various
islands or regions of the PGA. In such a way it is
possible to control the selective pressure and
population diversity in the PGA (Sekaj, 2004, Sekaj,
2007). However, this was out of the scope of this
paper. In this paper a "homogeneous" PGA structure
is considered, where each subpopulation has the
same genetic algorithm and its parameters.
Figure 13: Various topologies of migration-based PGA.
Higher influence than the migration topology has the
migration period, number of islands and the
subpopulation size. In Fig.14 comparison of
changing migration periods vs. changing number of
migrants is shown. Here the random migration
topology G (Fig.5) has been used. In all cases
similar (or even equal) numbers of migrants in a
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
300

longer time interval were exchanged. The best
performance has been obtained with the migration
period between 20 and 100 generations.
Lower or higher values of migration periods results
in worst performance. Each subpopulation needs
time between the migrations for their isolated
evolution to produce perspective genes or building
blocs, respectively. On the other hand, the number of
migrants hasn't a significant influence on the
performance ( Fig.15).
The next important factor is the population size.
In Fig.11 various configurations (number of islands /
population size) are compared. In each case the
number of individuals in the entire PGA was 450.
The best performance results from the configuration
9/50, which has a sufficient number of islands as
well as sufficient subpopulation size. In Fig.12 the
same factors are considered, but the numbers of
individuals in the entire PGA are not equal.
Therefore, on the horizontal axes the number of
fitness evaluations instead of the number of
generations is used. The best performance was
obtained with the configurations 15/50, 25/50 and
9/100 where sufficient number of islands and
sufficient subpopulation sizes ensures satisfactory
conditions, sufficient diversity and relative
independence of particular subpopulations.
Figure 14: Migration period / number of migrants.
Figure 15: Changing number of migrants, migration period
is 100 generations.
In Fig.16 the results of the overlapping-based PGA
are compared. We consider the architecture
according Fig.6 and Fig.7 with 9 overlapping
subpopulations. The number of individuals in the
overlapping areas has been changed from 2 to 10
and 16 individuals. The best performance has been
obtained with 10 shared individuals between each
two subpopulations.
Figure 16: Overlapping PGA, various numbers of shared
individuals.
The last mentioned PGA type is the fine-grained or
cellular architecture. Four variants of this algorithm
are compared in Fig.17. The algorithms are
described in the part 3.3. The first two types (1 and
2) perform mutation at the end of the new generation
calculation, when all individuals of the population
are already crossed over with selected neighbours
and replaced by the best offspring. Type 1 selects
the partner for crossing over from 8 neighbours
(Fig.7 left) and type 2 from 4 neighbours (Fig.7
right). Types 3 and 4 perform the mutation after
crossover of both parents. Then the best mutated
individual replaces the original individual. Type 3
selects the partner for crossover from 8 neighbours
and the type 4 from 4 neighbours.
Figure 17: Various types of cellular PGA.
EXPERIMENTAL COMPARISON OF SELECTED TYPES OF PARALLEL EVOLUTIONARY ALGORITHMS
301
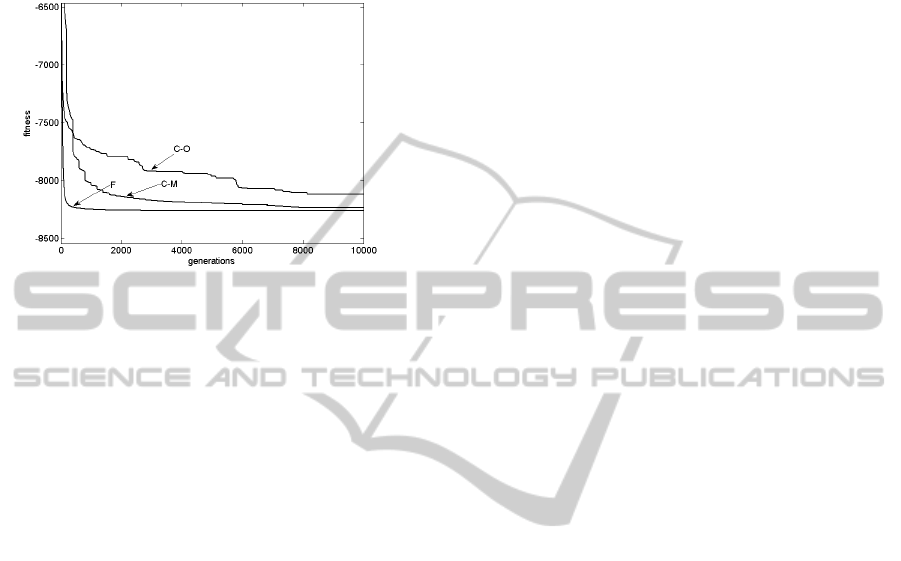
The last figure (Fig.18) depicts the comparison of
the best representatives of all PGA architectures.
The fastest convergence in case of the Eggholder
function has been achieved by the fine-grained
(cellular) PGA.
Figure 18: Comparison of various PGA types: Coarse-
grained migration-based PGA (C-M), Coarse-grained
overlapping-based PGA (C-O), Fine-grained PGA (F).
5 CONCLUSIONS
Selected types of parallel genetic algorithms have
been experimentally compared and the influence of
some of their parameters analyzed. We have
considered various architectures, various topologies
of migration connections, influence of changing
migration period, population size and number of
islands. In our experiments using the Eggholder
function the fine-grained PGA performance
outperforms the coarse-grained PGA. However, the
performance of all PGA types depends on their
parameters as well as on the problem to be solved.
In our comparison in each island of the PGA the
genetic algorithm with equal parameters has been
considered. Such "homogenous" algorithms have the
same diversity and selection pressure in all
subpopulations. Based on our experiments for such
type of PGA (PEA) we can make following
conclusions. Changing of migration topology has a
small influence on the PGA performance. The main
influence on the performance has the migration
period, subpopulation size and number of islands.
These factors affect the ability of all subpopulations
of the PGA to evolve perspective genes and building
blocs and effectively to explore the search space.
For each problem solved it is important to find a
balance between the "independence" of each
subpopulation for their evolution and diversity in
each subpopulation on the one side and the
communication and exchange of perspective genetic
information between subpopulations or individuals
on the other side.
The presented experimental study is a part of a
project, which should help to generalise the
properties and behaviour of various types of
parallel evolutionary algorithms and help to design
algorithms for solving hard search/optimisation
problems like modelling of bio-medicine processes,
optimisation of large technological and construction
tasks, solving of economical and financial problems
etc.
ACKNOWLEDGEMENTS
This work was supported by the Slovak Research
and Development Agency under the contract No.
APVV-0523-10.
REFERENCES
Alba E., Tomassini M., 2002. Parallelism and
Evolutionary Algorithms. In IEEE Trans. on
Evolutionary Computation, Vol. 6, NO.5.
Cantú-Paz E., 1995. A Summary of Research on Parallel
Genetic Algorithms. In IlliGAL Report No. 95007.
University of Illinois at Urbana-Champaign.
Cantú-Paz E., 1999. Migration Policies, Selection
Pressure, and Parallel Evolutionary Algorithms. In
IlliGAL Report 99015, University of Illinois at
Urbana-Champaign.
Giacobini M., Tomassini M., Tettamanzi A.G.B., Alba E.,
2005. Selection intensity in cellular evolutionary
algorithms for regular lattices. In IEEE Transactions
on Evolutionary Computation.
Lin S. Ch., Punch W., Goodman E., 1994. Coarse-grain
parallel genetic algorithms: Categorization and new
approach. In IEEE Symposium on Parallel and
Distributed Processing.
Nowostawski M., Poli R., 1999. Parallel Genetic
Algorithm Taxonomy. In KES’99.
Sekaj I., 2004. Robust Parallel Genetic Algorithms with
Re-Initialisation. In PPSN VIII, September 18-22,
Birmingham.
Sekaj I., Perkacz J., 2007. Some Aspects of Parallel
Genetic Algorithms with Population Re-initialization.
In CEC, Singapore.
Sekaj, I., Oravec, M., 2009. Selected Population
Characteristics of Fine-grained Parallel Genetic
Algorithms with Re-initialisation. In Proceedings of
the GEC 2009, Shanghai.
Skolicki Z., DeJong K., 2005. The influence of migration
sizes and intervals on island models. In GECCO,
Washington, USA.
Whitley D., Rana S., Heckendorn R. B.,1999. The island
model genetic algorithm: On separability, population
size and convergence. In Journal of Computing and
Information Technology, 7(1), pp.33-47.
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
302
