
EVOLVED PREAMBLES FOR MAX-SAT HEURISTICS
Lu´ıs O. Rigo Jr. and Valmir C. Barbosa
Programa de Engenharia de Sistemas e Computac¸˜ao, COPPE, Universidade Federal do Rio de Janeiro
Caixa Postal 68511, 21941-972 Rio de Janeiro, RJ, Brazil
Keywords:
MAX-SAT, MAX-SAT heuristics, Initial truth assignments.
Abstract:
MAX-SAT heuristics normally operate from random initial truth assignments to the variables. We consider
the use of what we call preambles, which are sequences of variables with corresponding single-variable as-
signment actions intended to be used to determine a more suitable initial truth assignment for a given problem
instance and a given heuristic. For a number of well established MAX-SAT heuristics and benchmark in-
stances, we demonstrate that preambles can be evolved by a genetic algorithm such that the heuristics are
outperformed in a significant fraction of the cases. The heuristics we consider include the well-known novelty,
walksat-tabu, and adaptnovelty+. Our benchmark instances are those of the 2004 SAT competition and those
of the 2008 MAX-SAT evaluation.
1 INTRODUCTION
Given a set V of Boolean variables and a set of dis-
junctive clauses on literals from V (i.e., variables
or their negations), MAX-SAT asks for a truth as-
signment to the variables that maximizes the num-
ber of clauses that are satisfied (i.e., made true by
that assignment). MAX-SAT is NP-hard (Garey and
Johnson, 1979) but can be approximated in polyno-
mial time, though not as close to the optimum as
one wishes. This holds in general (Ausiello et al.,
1999) as well as in the restricted case of three-literal
clauses (Dantsin et al., 2001). MAX-SAT has enjoyed
a paradigmatic status over the years, not only because
of its close relation to SAT, the first decision problem
to be proven NP-complete, but also because of its im-
portance to other areas (e.g., constraint satisfaction in
artificial intelligence (Dechter, 2003)).
Since NP-hardness isa property of worst-case sce-
narios, the difficulty of actually solving a specific
instance of an NP-hard problem varies widely with
both the instance’s size and internal structure. In fact,
in recent years it has become increasingly clear that
small changes in either can lead to significant varia-
tion in an algorithm’s performance, possibly even to
a divide between the instance’s being solvable or un-
solvable by that algorithm giventhe computational re-
sources at hand and the time one is willing to spend
(Hartmann and Weigt, 2005). Following some early
groundwork (Rice, 1976), several attempts have been
made at providing theoretical foundations or practical
guidelines for automatically selecting which method
to use given the instance (Russell and Subramanian,
1995; Minton, 1996; Fink, 1998; Gomes and Selman,
2001; Lagoudakis et al., 2001; Leyton-Brown et al.,
2003; Vassilevska et al., 2006; Xu et al., 2008). These
include approaches that have addressed the solution
of NP-complete problems.
Here we investigatea different, though related, ap-
proach to method selection in the case of MAX-SAT
instances. Since all MAX-SAT heuristics require an
initial truth assignment to the variables, and consid-
ering that this is invariably chosen at random, a nat-
ural question seems to be whether it is worth spend-
ing some additional effort to determine an initial as-
signment that is better suited to the instance at hand.
Once we adopt this two-stage template comprising an
initial-assignment selection in tandem with a heuris-
tic, fixing the latter reduces the issue of method selec-
tion to that of identifying a procedure to determine an
appropriate initial assignment. We refer to this pro-
cedure as a preamble to the heuristic. As we demon-
strate in the sequel, for several state-of-the-art heuris-
tics and problem instances the effort to come up with
an appropriate preamble pays off in terms of better
solutions for the same amount of time.
We proceed in the following manner. First, in
Section 2, we define what preambles are in the case
of MAX-SAT. Then we introduce an evolutionary
method for preamble determination in Section 3 and
givecomputationalresults in Section 4. We close with
concluding remarks in Section 5.
23
O. Rigo Jr. L. and C. Barbosa V..
EVOLVED PREAMBLES FOR MAX-SAT HEURISTICS.
DOI: 10.5220/0003660400230031
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2011), pages 23-31
ISBN: 978-989-8425-83-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 MAX-SAT PREAMBLES
Let n be the number of variables in V. Given a MAX-
SAT instance on V, a preamble p of length ℓ is a
sequence of pairs hv
1
,a
1
i,hv
2
,a
2
i,...,hv
ℓ
,a
ℓ
i, each
representing a computational step to be taken as the
preamble is played out. In this sequence, and for
1 ≤ k ≤ ℓ, the kth pair is such that v
k
∈ V and a
k
is
one of 2, 1, or 0, indicating respectively whether to
leave the value of v
k
unchanged, to act greedily when
choosing a value for v
k
, or to act contrarily to such
greedy assignment. A preamble need not include all
n variables, and likewise a variable may appear more
than once in it.
The greedy action to which a
k
sometimes refers
assigns to v
k
the truth value that maximizes the num-
ber of satisfied clauses at that point in the preamble.
Algorithmically, then, playing out p is equivalent to
performing the following steps from some initial truth
assignment to the variables in V:
1. k := 1.
2. If a
k
= 2, then proceed to Step 5.
3. Given the current values of all other variables,
compute the number of clauses that get satisfied
for each of the two possible assignments to v
k
.
4. If a
k
= 1, then set v
k
to the truth value yielding
the greatest number of satisfied clauses. If a
k
= 0,
then do the opposite. Break ties randomly.
5. k := k + 1. If k ≤ ℓ, then proceed to Step 2.
We use random initial assignments exclusively. A
MAX-SAT preamble, therefore, can be thought of as
isolating such initial randomness from the heuristic
proper that is to follow the preamble. Instead of start-
ing the heuristic at its usual random initial assign-
ment, we start it at the assignment determined by run-
ning the preamble.
It is curious to note that, as defined, a preamble
generalizes the sequence of steps generated by the
simulated annealing method (Kirkpatrick et al., 1983)
when applied to MAX-SAT. In fact, what simulated
annealing does in this case, following one of its varia-
tions (Geman and Geman, 1984; Barbosa, 1993), is to
choose v
k
by cycling through the members of V and
then let a
k
be either 1 or 0 with the Boltzmann-Gibbs
probability. At the high initial temperatures the two
outcomes are nearly equally probable, but the near-
zero final temperatures imply a
k
= 1 (i.e., be greedy)
with high probability. The generalization that comes
with our definition allows for various possibilities of
preamble construction, as the evolutionary procedure
we describe next.
3 METHODS
Given a MAX-SAT instance and heuristic H, our ap-
proach is to evolve the best possible preamble to H.
We do so through a genetic algorithm of the genera-
tional type (Mitchell, 1996). The description that fol-
lows refers to parameter values that were determined
in an initial calibration phase. This phase used the
heuristics gsat (Selman et al., 1992), gwsat (Selman
and Kautz, 1993), hsat (Gent and Walsh, 1993), hwsat
(Gent and Walsh, 1995), gsat-tabu (Mazure et al.,
1997), novelty (McAllester et al., 1997), walksat-
tabu (McAllester et al., 1997), adaptnovelty+ (Hoos,
2002), saps (Hutter et al., 2002), and sapsnr (Tomp-
kins and Hoos, 2004) as heuristic H, and also the in-
stances C880mul, am 8 8, c3540mul, term1mul, and
vdamul (Le Berre and Simon, 2005). Each of the lat-
ter involves variables that number in the order of 10
4
and clauses numbering in the order of 10
5
. Moreover,
not all optima are known (cf. Section 4).
The genetic algorithm operates on a population of
50 individuals, each being a preamble to heuristic H.
The fitness of individual p is computed as follows.
First p is run from 10 random truth assignments to
the variables, then H is run from the truth assign-
ment resulting from the run of p that satisfied the most
clauses (ties between runs of p are broken randomly).
Let R(p) denote the number of clauses satisfied by
this best run of p and S
H
(p) the number of clauses
satisfied after H is run. The fitness of individual p
is the pair hS
H
(p),R(p)i. Whenever two individuals’
fitnesses are compared, ties are first broken lexico-
graphically, then randomly. Selection is always per-
formed from linearly normalized fitnesses, the fittest
individual of the population being 20 times as fit as
the least fit.
For each MAX-SAT instance and each heuristic
H, we let the genetic algorithm run for a fixed amount
of time, during which a new population is repeatedly
produced from the current one and replaces it. The
initial population comprises individuals of maximum
length 1.5n, each created randomly to contain at least
0.4n distinct variables. The process of creating each
new population starts by an elitist step that transfers
the 20% fittest individualsfrom the current population
to the new one. It then repeats the following until the
new population is full.
First a decision is made as to whether crossover
(with probability 0.25) or mutation (with probability
0.75) is to be performed. For crossover two indi-
viduals are selected from the current population and
each is partitioned into three sections for application
of the standard two-point crossover operator. The par-
titioning is done randomly, provided the middle sec-
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
24

tion contains exactly 0.4n distinct variables, which is
always possible by construction of the initial popula-
tion (though at times either of the two extreme sec-
tions may turn out to be empty). The resulting two
individuals (whose lengths are no longer bounded by
1.5n) are added to the new population. For mutation a
single individual is selected from the current popula-
tion and 50% of its pairs are chosen at random. Each
of these, say the kth pair, undergoes either a random
change to both v
k
and a
k
(if this will leave the indi-
vidual with at least 0.4n distinct variables) or simply
a random change to a
k
(otherwise). The mutant is
then added to the new population.
The calibration phase referred to above also
yielded three champion heuristics, viz. novelty,
walksat-tabu, and adaptnovelty+. The results we give
in Section 4 refer exclusively to these, used either in
conjunction with the genetic algorithm as described
above or by themselves. In the latter case each heuris-
tic is run repeatedly, each time from a new random
truth assignment to the variables, until the same fixed
amount of time used for the genetic algorithm has
elapsed. The result reported by the genetic algorithm
refers to the fittest individual in the last population to
have been filled during that time. As for the heuris-
tic, in order to compare its performance with that of
the genetic algorithm as fairly as possible the result
that is reported is the best one obtained after every 50
repetitions.
All experiments were performed from within the
UBCSAT environment (Tompkins and Hoos, 2005).
Optima, whenever possible, were discovered sepa-
rately via the 2010 release of the MSUnCore code to
solve MAX-SAT exactly (Manquinho et al., 2009).
4 COMPUTATIONAL RESULTS
In our experiments we tackled all 100 instances of
the 2004 SAT competition (Le Berre and Simon,
2005), henceforth referred to as the 2004 dataset, and
all 112 instances of the 2008 MAX-SAT evaluation
(Argelich et al., 2008), henceforth referred to as the
2008 dataset. The time allotted for each instance to
the genetic algorithm or each of the three heuristics
by itself was of 60 minutes, always on identical hard-
ware and software, always with exclusive access to
the system. We report exclusively on the hardest in-
stances from either dataset, here defined to be those
for which MSUnCore found no answer as a result of
being stymied by the available 4 gigabytes of RAM
and the system’s inability to perform further swap-
ping. There are 51 such instances in the 2004 dataset,
11 in the 2008 dataset, totaling 62 instances.
Our results are given in Tables 1 through 6 for H =
novelty (Tables 1 and 4), H = walksat-tabu (Tables 2
and 5), and H = adaptnovelty+ (Tables 3 and 6). They
refer to those of the 62 instances that come from the
2004 dataset (Tables 1 through 3) and those that come
from the 2008 dataset (Tables 4 through 6). Each ta-
ble contains a row for each of the corresponding in-
stances. For each instance the number n of variables
is given, as well as the number of clauses (m) and re-
sults for the genetic algorithm and for the heuristic in
question by itself. These results are the number of sat-
isfied clauses and the time at which this solution was
first found during the allotted 60 minutes. Missing re-
sults indicate either that no population could be filled
during this time (in the case of the genetic algorithm)
or that no batch of 50 runs of the heuristic could be
finished.
Some entries in the tables are highlighted by a
bold typeface to indicate that the genetic algorithm
found a solution strictly better than the one found by
the heuristic when used by itself, or a solution sat-
isfying the same number of clauses but first encoun-
tered in a shorter time. In the former case only the
number of satisfied clauses is highlighted, in the lat-
ter case the time is highlighted as well. The number
of highlighted instances amounts to the ratios given
in Table 7. Clearly, with the notable exception of
H = walksat-tabu on the 2008 dataset (on which the
use of H alone outperformed the genetic algorithm on
all 11 instances), the genetic algorithm succeeds well
on a significant fraction of the instances.
Revising these ratios to contemplate all instances
from both datasets (i.e., include the results omitted
from Tables 1 through 6) yields the ratios in Table 8.
These show that the genetic algorithm fares even bet-
ter when evaluated on all 100 instances of the 2004
dataset. They also show slightly lower ratios for the
genetic algorithm on the 112-instance 2008 dataset
for H = novelty and H = adaptnovelty+. As for
H = walksat-tabu, we see in Table 8 a dramatic in-
crease from the 0.000 of Table 7, indicating that for
this particular H on the complete 2008 dataset the
genetic algorithm does better than the heuristic alone
only on the comparatively easier instances (and then
for a significant fraction of them).
5 CONCLUDING REMARKS
Given a heuristic for some problem of combinatorial
optimization, a preamble such as we defined in Sec-
tion 2 for MAX-SAT is a selector of initial conditions.
As such, it aims at isolating the inevitable random-
ness of the initial conditions one normally uses with
EVOLVED PREAMBLES FOR MAX-SAT HEURISTICS
25

Table 1: Results for H = novelty on the 2004 dataset. Times are given in minutes.
Genetic algorithm novelty alone
Instance n m Num. sat. cl. Time Num. sat. cl. Time
c3540mul 5248 33199 33176 17.965 33180 6.291
c6288mul 9540 61421 61375 21.391 61375 6.706
dalumul 9426 59991 59972 59.961 59973 5.712
frg1mul 3230 20575 20574 0.543 20574 1.390
k2mul 11680 74581 74524 1.729 74516 23.493
x1mul 8760 55571 55570 1.550 55570 5.383
am 6 6 2269 7814 7813 0.263 7813 0.267
am 7 7 4264 14751 14744 55.270 14733 50.688
am 8 8 7361 25538 25331 37.914 25332 36.184
am 9 9 11908 41393 40982 1.827 40970 36.322
li-exam-61 28147 108436 108011 47.997 108041 22.993
li-exam-62 28147 108436 107999 56.149 108006 27.760
li-exam-63 28147 108436 107998 29.129 108003 19.108
li-exam-64 28147 108436 107987 58.590 108013 34.106
li-test4-100 36809 142491 141844 34.560 141856 35.189
li-test4-101 36809 142491 141858 40.733 141865 31.374
li-test4-94 36809 142491 141863 2.556 141843 29.103
li-test4-95 36809 142491 141850 58.823 141868 16.500
li-test4-96 36809 142491 141858 6.038 141848 16.622
li-test4-97 36809 142491 141855 29.113 141852 33.242
li-test4-98 36809 142491 141862 40.632 141850 52.114
li-test4-99 36809 142491 141859 12.537 141855 31.298
gripper10u 2312 18666 18663 0.877 18663 2.014
gripper11u 3084 26019 26017 15.150 26016 6.459
gripper12u 3352 29412 29409 14.485 29409 29.184
gripper13u 4268 38965 38961 9.830 38961 1.315
gripper14u 4584 43390 43386 23.381 43386 36.584
bc56-sensors-1-k391-unsat 561371 1778987 1600252 15.997 1600079 43.783
bc56-sensors-2-k592-unsat 850398 2694319 2366874 48.252 2366923 13.745
bc57-sensors-1-k303-unsat 435701 1379987 1261961 39.150 1262043 14.386
dme-03-1-k247-unsat 261352 773077 736229 49.430 736010 22.759
motors-stuck-1-k407-unsat 654766 2068742 1842393 55.420 1842299 7.294
motors-stuck-2-k314-unsat 505536 1596837 1445274 53.360 1445323 57.764
valves-gates-1-k617-unsat 985042 3113540 2714448 58.357 2714681 30.268
6pipe 15800 394739 394717 42.251 - -
7pipe 23910 751118 - - - -
comb1 5910 16804 16749 43.330 16751 44.024
dp12u11 11137 30792 30785 11.240 30789 17.881
f2clk 50 34678 101319 100629 18.230 100668 29.506
fifo8 300 194762 530713 506270 9.520 506329 49.814
homer17 286 1742 1738 0.126 1738 0.317
homer18 308 2030 2024 0.131 2024 0.331
homer19 330 2340 2332 0.142 2332 0.349
homer20 440 4220 4202 0.170 4202 0.429
k2fix gr 2pinvar w8 3771 270136 269918 47.860 269910 29.096
k2fix gr 2pinvar w9 5028 307674 307563 43.461 307565 42.008
k2fix gr 2pin w8 9882 295998 295657 54.870 295691 5.697
k2fix gr 2pin w9 13176 345426 345230 39.450 345228 24.266
k2fix gr rcs w8 10056 271393 271296 17.291 271292 58.947
sha1 61377 255417 251863 54.40 251927 48.348
sha2 61377 255417 251915 19.47 251873 17.809
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
26

Table 2: Results for H = walksat-tabu on the 2004 dataset. Times are given in minutes.
Genetic algorithm walksat-tabu alone
Instance n m Num. sat. cl. Time Num. sat. cl. Time
c3540mul 5248 33199 33164 24.820 33166 59.816
c6288mul 9540 61421 61392 3.884 61389 23.451
dalumul 9426 59991 59896 2.730 59910 2.546
frg1mul 3230 20575 20570 30.706 20570 6.465
k2mul 11680 74581 74340 6.720 74341 21.223
x1mul 8760 55571 55561 34.556 55562 26.049
am 6 6 2269 7814 7809 2.580 7810 58.420
am 7 7 4264 14751 14732 29.810 14729 0.926
am 8 8 7361 25538 25466 19.600 25473 45.678
am 9 9 11908 41393 41183 34.960 41189 59.298
li-exam-61 28147 108436 107983 14.918 107982 31.107
li-exam-62 28147 108436 107974 41.560 107992 53.727
li-exam-63 28147 108436 107980 48.127 107978 58.207
li-exam-64 28147 108436 107985 3.946 107985 20.522
li-test4-100 36809 142491 141790 39.720 141782 21.592
li-test4-101 36809 142491 141804 19.040 141800 11.141
li-test4-94 36809 142491 141806 2.853 141780 44.018
li-test4-95 36809 142491 141791 35.540 141782 27.593
li-test4-96 36809 142491 141804 24.995 141791 33.641
li-test4-97 36809 142491 141791 26.641 141805 22.784
li-test4-98 36809 142491 141777 26.300 141791 54.528
li-test4-99 36809 142491 141774 37.930 141781 51.666
gripper10u 2312 18666 18662 42.287 18662 58.256
gripper11u 3084 26019 26014 2.383 26014 10.450
gripper12u 3352 29412 29406 2.104 29406 2.788
gripper13u 4268 38965 38959 2.370 38959 50.868
gripper14u 4584 43390 43383 2.520 43382 0.512
bc56-sensors-1-k391-unsat 561371 1778987 1600245 36.329 1599963 43.683
bc56-sensors-2-k592-unsat 850398 2694319 2361372 33.625 2361225 39.390
bc57-sensors-1-k303-unsat 435701 1379987 1264444 33.863 1264039 44.873
dme-03-1-k247-unsat 261352 773077 740068 15.573 739924 53.964
motors-stuck-1-k407-unsat 654766 2068742 1840274 36.547 1839998 36.970
motors-stuck-2-k314-unsat 505536 1596837 1445995 41.870 1445813 34.788
valves-gates-1-k617-unsat 985042 3113540 2705763 55.140 2705761 53.865
6pipe 15800 394739 394727 48.824 - -
7pipe 23910 751118 751102 27.336 - -
comb1 5910 16804 16713 59.406 16717 9.986
dp12u11 11137 30792 30775 22.338 30773 27.777
f2clk 50 34678 101319 100087 49.690 100075 27.279
fifo8 300 194762 530713 509196 2.030 509252 56.291
homer17 286 1742 1738 0.105 1738 0.268
homer18 308 2030 2024 0.112 2024 0.285
homer19 330 2340 2332 0.119 2332 0.309
homer20 440 4220 4202 0.152 4202 0.374
k2fix gr 2pinvar w8 3771 270136 269839 46.921 269855 34.207
k2fix gr 2pinvar w9 5028 307674 307490 31.670 307485 14.594
k2fix gr 2pin w8 9882 295998 295544 12.160 295554 43.311
k2fix gr 2pin w9 13176 345426 345065 3.299 345044 47.063
k2fix gr rcs w8 10056 271393 271301 42.525 271301 48.211
sha1 61377 255417 251374 30.88 251364 9.204
sha2 61377 255417 251390 7.67 251392 16.520
EVOLVED PREAMBLES FOR MAX-SAT HEURISTICS
27

Table 3: Results for H = adaptnovelty+ on the 2004 dataset. Times are given in minutes.
Genetic algorithm adaptnovelty+ alone
Instance n m Num. sat. cl. Time Num. sat. cl. Time
c3540mul 5248 33199 33162 52.030 33153 30.089
c6288mul 9540 61421 61382 1.893 61382 36.361
dalumul 9426 59991 59930 47.250 59920 44.117
frg1mul 3230 20575 20574 0.527 20574 1.290
k2mul 11680 74581 74417 52.360 74407 16.932
x1mul 8760 55571 55570 1.153 55570 2.477
am 6 6 2269 7814 7813 0.102 7813 0.267
am 7 7 4264 14751 14750 0.277 14750 0.558
am 8 8 7361 25538 25523 44.450 25520 8.450
am 9 9 11908 41393 41296 49.254 41293 53.522
li-exam-61 28147 108436 108037 23.833 108028 54.671
li-exam-62 28147 108436 108045 38.670 108032 17.074
li-exam-63 28147 108436 108031 44.030 108026 49.837
li-exam-64 28147 108436 108030 41.830 108037 49.076
li-test4-100 36809 142491 141903 16.011 141902 35.010
li-test4-101 36809 142491 141894 4.150 141897 15.527
li-test4-94 36809 142491 141899 38.595 141908 37.992
li-test4-95 36809 142491 141900 17.200 141890 57.627
li-test4-96 36809 142491 141902 31.204 141896 52.649
li-test4-97 36809 142491 141897 27.190 141920 33.317
li-test4-98 36809 142491 141898 34.560 141907 52.417
li-test4-99 36809 142491 141902 29.421 141906 12.445
gripper10u 2312 18666 18665 0.161 18665 5.913
gripper11u 3084 26019 26018 18.106 26018 15.914
gripper12u 3352 29412 29410 0.600 29411 56.930
gripper13u 4268 38965 38963 4.270 38963 0.454
gripper14u 4584 43390 43388 23.785 43388 0.456
bc56-sensors-1-k391-unsat 561371 1778987 1623357 17.990 1623430 36.854
bc56-sensors-2-k592-unsat 850398 2694319 2394308 40.210 2393894 6.102
bc57-sensors-1-k303-unsat 435701 1379987 1282208 35.553 1282338 34.813
dme-03-1-k247-unsat 261352 773077 746902 43.755 746935 19.452
motors-stuck-1-k407-unsat 654766 2068742 1866990 12.900 1867266 56.079
motors-stuck-2-k314-unsat 505536 1596837 1467201 55.320 1467123 43.089
valves-gates-1-k617-unsat 985042 3113540 2742641 48.170 2742310 18.078
6pipe 15800 394739 393808 46.970 393771 41.444
7pipe 23910 751118 749636 54.051 - -
comb1 5910 16804 16756 29.750 16759 31.832
dp12u11 11137 30792 30723 15.480 30722 12.257
f2clk 50 34678 101319 100431 6.983 100435 3.063
fifo8 300 194762 530713 516316 55.551 516380 35.441
homer17 286 1742 1738 0.133 1738 0.330
homer18 308 2030 2024 0.138 2024 0.345
homer19 330 2340 2332 0.143 2332 0.367
homer20 440 4220 4202 0.175 4202 0.440
k2fix gr 2pinvar w8 3771 270136 269923 30.530 269930 39.335
k2fix gr 2pinvar w9 5028 307674 307560 47.330 307559 28.284
k2fix gr 2pin w8 9882 295998 295646 55.630 295645 11.987
k2fix gr 2pin w9 13176 345426 345123 38.150 345150 51.661
k2fix gr rcs w8 10056 271393 271282 25.350 271290 39.640
sha1 61377 255417 252622 34.02 252613 52.078
sha2 61377 255417 252615 34.58 252617 22.981
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
28
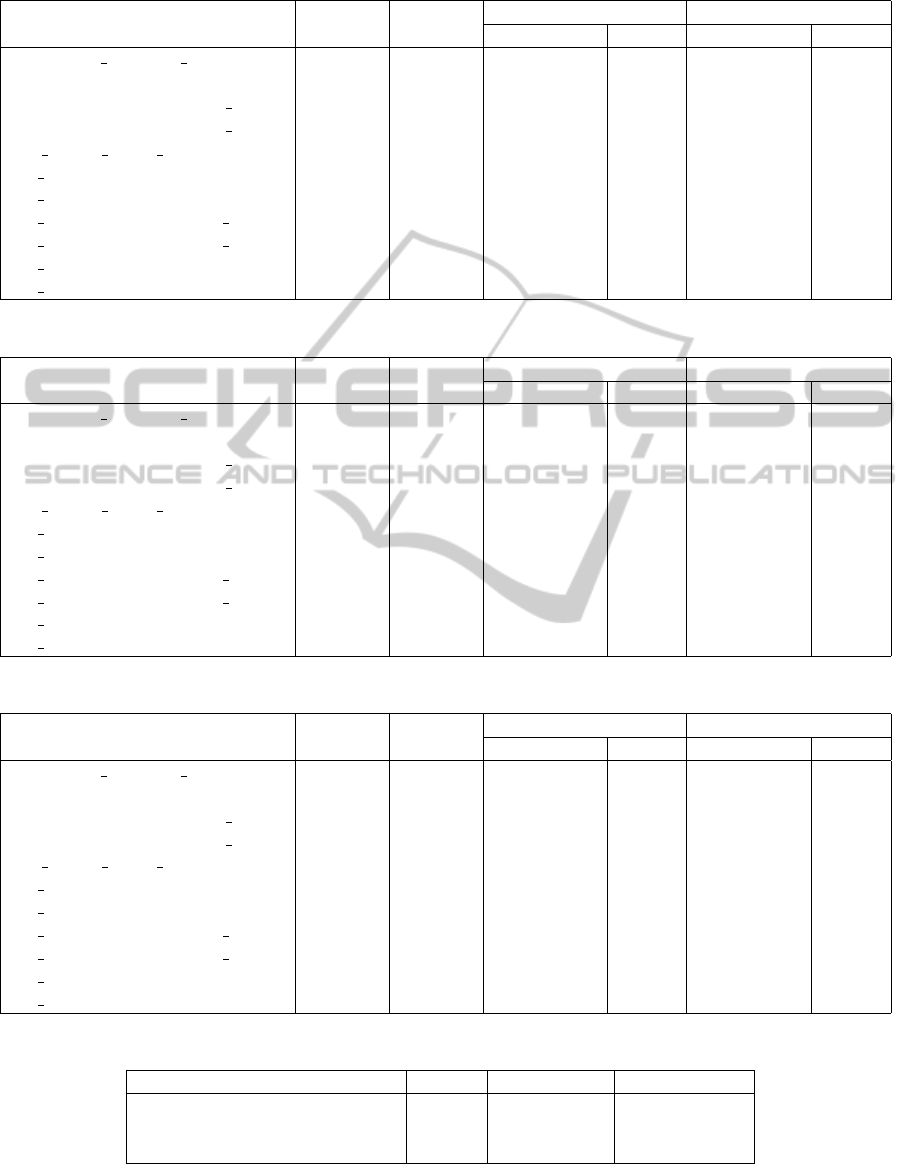
Table 4: Results for H = novelty on the 2008 dataset. Times are given in minutes.
Genetic algorithm novelty alone
Instance n m Num. sat. cl. Time Num. sat. cl. Time
rsdecoder1 blackbox KESblock 707330 1106376 1030025 5.471 1030001 47.969
rsdecoder4.dimacs 237783 933978 896327 16.880 896441 51.221
rsdecoder-problem.dimacs 38 1198012 3865513 3350748 11.820 3351073 46.902
rsdecoder-problem.dimacs 41 1186710 3829036 3320154 37.064 3320274 36.249
SM MAIN MEM buggy1.dimacs 870975 3812147 3416609 43.833 3416837 37.047
wb 4m8s1.dimacs 463080 1759150 1624751 17.008 1624325 27.448
wb 4m8s4.dimacs 463080 1759150 1624017 4.333 1623800 22.801
wb 4m8s-problem.dimacs 47 2691648 8517027 7159756 56.460 7159458 53.487
wb 4m8s-problem.dimacs 49 2785108 8812799 7401876 43.930 7402080 52.858
wb conmax1.dimacs 277950 1221020 1168273 23.774 1168267 27.155
wb conmax3.dimacs 277950 1221020 1168336 1.808 1168173 56.621
Table 5: Results for H = walksat-tabu on the 2008 dataset. Times are given in minutes.
Genetic algorithm walksat-tabu alone
Instance n m Num. sat. cl. Time Num. sat. cl. Time
rsdecoder1 blackbox KESblock 707330 1106376 1028280 55.013 1028328 33.828
rsdecoder4.dimacs 237783 933978 895865 1.950 895990 16.142
rsdecoder-problem.dimacs 38 1198012 3865513 3334250 34.230 3334450 49.290
rsdecoder-problem.dimacs 41 1186710 3829036 3304293 7.626 3304476 4.832
SM MAIN MEM buggy1.dimacs 870975 3812147 3386126 37.130 3386263 58.493
wb 4m8s1.dimacs 463080 1759150 1611716 56.910 1611839 59.405
wb 4m8s4.dimacs 463080 1759150 1610945 36.070 1611361 56.378
wb 4m8s-problem.dimacs 47 2691648 8517027 7133234 33.360 7133580 44.962
wb 4m8s-problem.dimacs 49 2785108 8812799 7374846 3.900 7374877 32.896
wb conmax1.dimacs 277950 1221020 1156736 35.785 1156771 22.056
wb conmax3.dimacs 277950 1221020 1156718 31.800 1156841 35.277
Table 6: Results for H = adaptnovelty+ on the 2008 dataset. Times are given in minutes.
Genetic algorithm adaptnovelty+ alone
Instance n m Num. sat. cl. Time Num. sat. cl. Time
rsdecoder1 blackbox KESblock 707330 1106376 1042736 58.190 1042849 35.251
rsdecoder4.dimacs 237783 933978 904931 50.378 905006 38.068
rsdecoder-problem.dimacs 38 1198012 3865513 3374308 33.560 3374204 28.959
rsdecoder-problem.dimacs 41 1186710 3829036 3343967 55.770 3343653 12.919
SM MAIN MEM buggy1.dimacs 870975 3812147 3431928 15.243 3431455 18.274
wb 4m8s1.dimacs 463080 1759150 1637425 6.646 1637337 25.506
wb 4m8s4.dimacs 463080 1759150 1636787 15.974 1636718 49.083
wb 4m8s-problem.dimacs 47 2691648 8517027 7189090 14.730 7189244 19.575
wb 4m8s-problem.dimacs 49 2785108 8812799 7432769 20.240 7432463 12.193
wb conmax1.dimacs 277950 1221020 1175783 43.730 1175804 8.269
wb conmax3.dimacs 277950 1221020 1175833 12.660 1175942 14.228
Table 7: Success ratios of the genetic algorithm as per Tables 1 through 6.
Instance set novelty walksat-tabu adaptnovelty+
2004 dataset 0.540 0.667 0.588
2008 dataset 0.545 0.000 0.545
2004 & 2008 datasets combined 0.541 0.548 0.581
EVOLVED PREAMBLES FOR MAX-SAT HEURISTICS
29
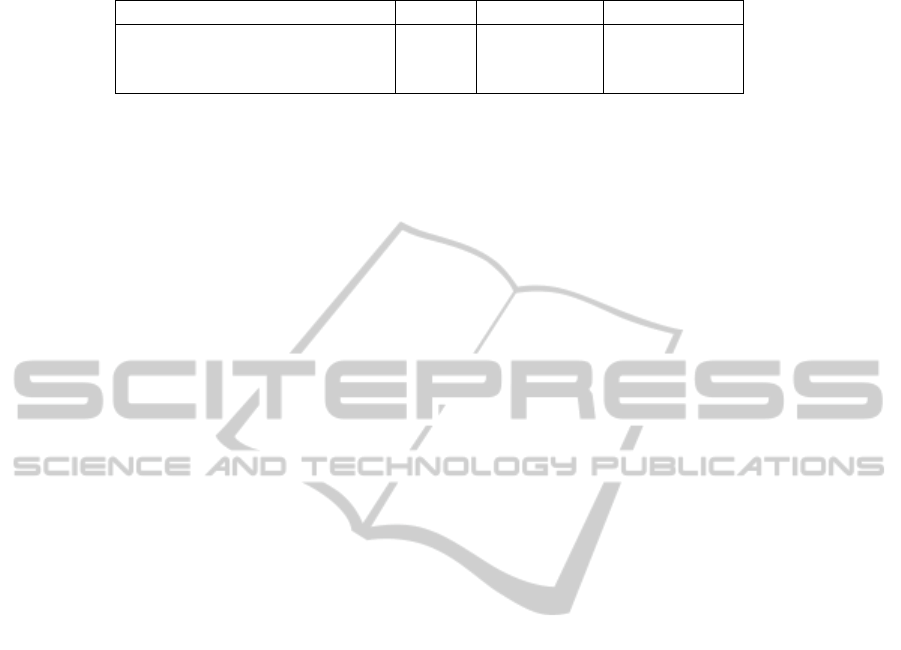
Table 8: Success ratios of the genetic algorithm over all 100 instances of the 2004 dataset and all 112 instances of the 2008
dataset.
Instance set novelty walksat-tabu adaptnovelty+
2004 dataset 0.600 0.700 0.630
2008 dataset 0.518 0.518 0.509
2004 & 2008 datasets combined 0.557 0.604 0.566
such heuristics from the heuristic itself. By doing
so, preambles attempt to poise the heuristic to oper-
ate from more favorable initial conditions.
In this paper we have demonstrated the success
of MAX-SAT preambles when they are discovered,
given the MAX-SAT instance and heuristic of inter-
est, via an evolutionary algorithm. As we showed in
Section 4, for well established benchmark instances
and heuristics the resulting genetic algorithm can out-
perform the heuristics themselves when used alone.
We believe further effort can be profitably spent on at-
tempting similar solutions to other problems that, like
MAX-SAT, can be expressed as an unconstrained op-
timization problem on binary variables. Some of them
are the maximum independent set and minimum dom-
inating set problems on graphs, both admitting well-
known formulations of this type (Barbosa and Gafni,
1989).
ACKNOWLEDGEMENTS
The authors acknowledge partial support from CNPq,
CAPES, and a FAPERJ BBP grant.
REFERENCES
Argelich, J., Li, C. M., Many`a, F., and Planes, J.
(2008). Third Max-SAT evaluation. URL http://
www.maxsat.udl.cat/08/.
Ausiello, G., Crescenzi, P., Gambosi, G., Kann, V.,
Marchetti-Spaccamela, A., and Protasi, M. (1999).
Complexity and Approximation: Combinatorial Op-
timization Problems and their Approximability Prop-
erties. Springer-Verlag, Berlin, Germany.
Barbosa, V. C. (1993). Massively Parallel Models of Com-
putation. Ellis Horwood, Chichester, UK.
Barbosa, V. C. and Gafni, E. (1989). A distributed imple-
mentation of simulated annealing. Journal of Parallel
and Distributed Computing, 6:411–434.
Dantsin, E., Gavrilovich, M., Hirsch, E., and Konev, B.
(2001). MAX SAT approximation beyond the lim-
its of polynomial-time approximation. Annals of Pure
and Applied Logic, 113:81–94.
Dechter, R. (2003). Constraint Processing. Morgan Kauf-
mann, San Francisco, CA.
Fink, E. (1998). How to solve it automatically: Selection
among problem-solving methods. In Proceedings of
the Fourth International Conference on Artificial In-
telligence Planning Systems, pages 128–136, Menlo
Park, CA. AAAI Press.
Garey, M. R. and Johnson, D. S. (1979). Computers
and Intractability: A Guide to the Theory of NP-
Completeness. W. H. Freeman, New York, NY.
Geman, S. and Geman, D. (1984). Stochastic relaxation,
Gibbs distributions, and the Bayesian restoration of
images. IEEE Transactions on Pattern Analysis and
Machine Intelligence, PAMI-6:721–741.
Gent, I. P. and Walsh, T. (1993). Towards an understand-
ing of hill-climbing procedures for SAT. In Proceed-
ings of the Eleventh National Conference on Artificial
Intelligence, pages 28–33, Menlo Park, CA. AAAI
Press.
Gent, I. P. and Walsh, T. (1995). Unsatisfied variables in lo-
cal search. In Hallam, J., editor, Hybrid Problems, Hy-
brid Solutions, pages 73–85, Amsterdam, The Nether-
lands. IOS Press.
Gomes, C. P. and Selman, B. (2001). Algorithm portfolios.
Artificial Intelligence, 126:43–62.
Hartmann, A. K. and Weigt, M. (2005). Phase Transi-
tions in Combinatorial Optimization Problems: Ba-
sics, Algorithms and Statistical Mechanics. Wiley-
VCH, Weinheim, Germany.
Hoos, H. H. (2002). An adaptive noise mechanism for
WalkSAT. In Proceedings of the Eighteenth National
Conference on Artificial Intelligence, pages 655–660,
Menlo Park, CA. AAAI Press.
Hutter, F., Tompkins, D. A. D., and Hoos, H. H. (2002).
Scaling and probabilistic smoothing: Efficient dy-
namic local search for SAT. In van Hentenryck, P., ed-
itor, Principles and Practice of Constraint Program-
ming, volume 2470 of Lecture Notes in Computer
Science, pages 233–248, Berlin, Germany. Springer-
Verlag.
Kirkpatrick, S., Gelatt, C. D., and Vecchi, M. P. (1983). Op-
timization by simulated annealing. Science, 220:671–
680.
Lagoudakis, M. G., Littman, M. L., and Parr, R. E. (2001).
Selecting the right algorithm. In Proceedings of the
2001 AAAI Fall Symposium Series: Using Uncertainty
within Computation, pages 74–75, Menlo Park, CA.
AAAI Press.
Le Berre, D. and Simon, L. (2005). The SAT 2004 com-
petition. In Hoos, H. H. and Mitchell, D. G., edi-
tors, Theory and Applications of Satisfiability Testing,
volume 3542 of Lecture Notes in Computer Science,
pages 321–344, Berlin, Germany. Springer-Verlag.
Leyton-Brown, K., Nudelman, E., Andrew, G., McFadden,
J., and Shoham, Y. (2003). Boosting as a metaphor for
algorithm design. In Rossi, F., editor, Principles and
Practice of Constraint Programming, volume 2833 of
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
30

Lecture Notes in Computer Science, pages 899–903,
Berlin, Germany. Springer-Verlag.
Manquinho, V., Marques-Silva, J., and Planes, J. (2009).
Algorithms for weighted Boolean optimization. In
Kullmann, O., editor, Theory and Applications of Sat-
isfiability Testing, volume 5584 of Lecture Notes in
Computer Science, pages 495–508, Berlin, Germany.
Springer-Verlag.
Mazure, B., Sais, L., and Gregoire, E. (1997). Tabu search
for SAT. In Proceedings of the Fourteenth National
Conference on Artificial Intelligence, pages 281–285,
Menlo Park, CA. AAAI Press.
McAllester, D., Selman, B., and Kautz, H. (1997). Evidence
for invariants in local search. In Proceedings of the
Fourteenth National Conference on Artificial Intelli-
gence, pages 321–326, Menlo Park, CA. AAAI Press.
Minton, S. (1996). Automatically configuring constraint
satisfaction programs: A case study. Constraints, 1:7–
43.
Mitchell, M. (1996). An Introduction to Genetic Algo-
rithms. The MIT Press, Cambridge, MA.
Rice, J. R. (1976). The algorithm selection problem. In
Rubinoff, M. and Yovits, M. C., editors, Advances
in Computers, volume 15, pages 65–118. Academic
Press, New York, NY.
Russell, S. and Subramanian, D. (1995). Provably bounded-
optimal agents. Journal of Artificial Intelligence Re-
search, 2:575–609.
Selman, B. and Kautz, H. (1993). Domain-independant ex-
tensions to GSAT: Solving large structured variables.
In Proceedings of the Thirteenth International Joint
Conference on Artificial Intelligence, pages 290–295,
San Mateo, CA. Morgan Kaufmann.
Selman, B., Levesque, H., and Mitchell, D. (1992). A new
method for solving hard satisfiability problems. In
Proceedings of the Tenth National Conference on Ar-
tificial Intelligence, pages 459–465, Menlo Park, CA.
AAAI Press.
Tompkins, D. A. D. and Hoos, H. H. (2004). Warped land-
scapes and random acts of SAT solving. In Proceed-
ings of the Eighth International Symposium on Arti-
ficial Intelligence and Mathematics, Piscataway, NJ.
RUTCOR.
Tompkins, D. A. D. and Hoos, H. H. (2005). UBCSAT:
An implementation and experimentation environment
for SLS algorithms for SAT and MAX-SAT. In Hoos,
H. H. and Mitchell, D. G., editors, Theory and Ap-
plications of Satisfiability Testing, volume 3542 of
Lecture Notes in Computer Science, pages 306–320,
Berlin, Germany. Springer-Verlag.
Vassilevska, V., Williams, R., and Woo, S. L. M. (2006).
Confronting hardness using a hybrid approach. In
Proceedings of the Seventeenth Annual ACM-SIAM
Symposium on Discrete Algorithms, pages 1–10, New
York, NY. ACM Press.
Xu, L., Hutter, F., Hoos, H. H., and Leyton-Brown, K.
(2008). SATzilla: Portfolio-based algorithm selection
for SAT. Journal of Artificial Intelligence Research,
32:565–606.
EVOLVED PREAMBLES FOR MAX-SAT HEURISTICS
31
