
A FUZZY SCHEME FOR IMAGE NOISE REDUCTION
Philippe Vautrot
1
, Michel Herbin
2
and Laurent Hussenet
2
1
CReSTIC EA 3804, University of Reims Champagne Ardenne, Department of Informatique, IUT Info
Rue des Cray`eres, BP 1035, 51687 Reims Cedex 2, France
2
IUT RCC, Chauss´ee du port, BP 541, 51012 Chˆalons-en-Champagne, France
Keywords:
Image noise reduction, Bilateral filtering, Fuzzy filter.
Abstract:
The improvement of acquisition devices increases the need for processing of multicomponent images. In
this context, the noise reduction is a preliminary preprocessing step affecting the results of the other image
operations. This paper proposes a framework explaining usual noise reduction methods by the means of two
fuzzy logic techniques: first a pixel fuzzification and second a defuzzification for estimating the filtered values.
A new density-based filter is built for removing both impulse noise and Gaussian noise. The filter we propose
is robust against outliers and it improves the classical bilateral approach for noise reduction of multicomponent
images.
1 INTRODUCTION
In the framework of image processing, one of the first
tasks consists in removing or reducing noise from the
images (Gonzales and Woods, 1992). The improve-
ment of acquisition devices increases the need for pro-
cessing multicomponent images obtained from differ-
ent channels (Kotropoulos and Pitas, 2001; Bovik,
2000). The independent processing of image compo-
nents turns out to be inappropriate and leads to strong
artifacts (Lukac et al., 2006). Thus the noise reduc-
tion of multicomponent images is an active field of
research in satellite remote sensing, robot guidance,
electron microscopy, medical imaging, color process-
ing and real-time applications (Lin and Hsueh, 2000;
Wong et al., 2004; Gallegos-Funes and Ponomaryov,
2004). This paper focuses on this preprocessing step
for reducing both additive Gaussian noise and im-
pulse noise. Additive Gaussian noise corrupts images
because of the imprecision of acquisition devices. Im-
pulse noise is generally produced by the transmission
devices (Bovik, 2000).
The noise reduction consists in filtering the im-
age, classically by computing a barycenter within a
window. The selection of barycentric coordinates is
the main key of noise reduction methods. The fuzzy
techniques also addresses this issue of noise reduc-
tion (Ville et al., 2003; Morillas et al., 2009; Ca-
marena et al., 2010). In this paper, we consider that
the filtering window is a fuzzy set. First we determine
these fuzzy sets associated to each pixel. This step
corresponds to a fuzzification of the pixels. Second
the estimation of the filtered value corresponds to a
defuzzification (Leekwijck and Kerre, 1999). More-
over the pixels of a multi-component image have both
2-dimensional spatial coordinates and n-dimenional
photometric coordinates associated with the n compo-
nents of the image. The bilateral filtering is a classical
way taking into account both the spatial aspect and
the photometric aspect of images in image process-
ing. Bilateral filter of Tomasi and Manduchi (Tomasi
and Manduchi, 1998) is the archetype of such bilateral
approach. Thanks to the agregation operators (De-
tyniecki, 2001), the fuzzy logic enables us to general-
ize the bilateral approach of filtering. Unfortunately
Bilateral filter is not robust against outliers. Thus this
paper proposes a new bilateral filter based on density
estimation that provides robustness against outliers.
The paper is organized as follows: Section 2
presents the general frameworkselecting fuzzy neigh-
borhood of each pixel for image filtering. Section 3
is devoted to the defuzzification step for estimating
the filtered value of a pixel. In Section 4 we study
the combination of fuzzy neighborhood improving
the classical bilateral filtering (Tomasi and Manduchi,
1998). This approach is applied to reduce Gaussian
noise and impulse noise in color images. The last Sec-
tion proposes a discussion and concludes this paper.
441
Vautrot P., Herbin M. and Hussenet L..
A FUZZY SCHEME FOR IMAGE NOISE REDUCTION.
DOI: 10.5220/0003671604410445
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (FCTA-2011), pages 441-445
ISBN: 978-989-8425-83-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 FUZZY NEIGHBORHOOD OF A
PIXEL
Let p be a pixel of a multicomponent image I with d
components. Let I(p) be its photometric vector. Re-
ducing the noise, I(p) is replaced by the filtered value
I
∗
(p) which is estimated within a window W
p
cen-
tered on p. Let p
1
, p
2
, ...p
N
be the N pixels of W
p
(N = n × n). I
∗
(p) is usually a barycenter of I(p
1
),
I(p
2
),... I(p
N
) defined by:
I
∗
(p) =
1
∑
1≤i≤N
µ(i)
∑
1≤i≤N
µ(i)I(p
i
) (1)
where µ(i) are the barycentric coordinates of I
∗
(p).
In the fuzzy logic frame, µ(i) becomes the mem-
bership value of the pixel p
i
to a fuzzy set ep. This
fuzzy set has its support in W
p
. Then the first step of
the filtering procedure consists in selecting this fuzzy
neighborhood of p. This fuzzification step is detailed
in the following subsections.
2.1 Fuzzy Spatial Neighborhood
When the membership values µ(i) depend only on the
spatial locations of the pixels p
i
, then a fuzzy spa-
tial neighborhood ep
spat
is defined for filtering. Gaus-
sian filter is the archetype of these spatial filters. The
membership values µ
spat
(i) are defined by:
µ
spat
(i) = exp
−
dist
2
spat
(p, p
i
)
2σ
2
spat
(2)
where dist
spat
is the Euclidean distance and σ
spat
is
the standard deviation of the Gaussian filter. Note that
these fuzzy neighborhoods are normalized fuzzy sets
(Bouchon-Meunier, 1995) and their largest member-
ship values are equal to 1.
2.2 Fuzzy Photometric Neighborhood
When the membership values depend only on the
closeness between the photometric values I(p
i
) and
I(p), then the fuzzy neighborhood of p is designed
in the photometric space. Rank filter or vector me-
dian filters (Astola et al., 1990) give examples of such
photometric filters. They are obtained by ordering the
vectors I(p
1
), I(p
2
),... I(p
N
). The estimation of I
∗
(p)
is based on the ranks of I(p
i
) vectors. In such cases,
the membership values µ
phot
(i) of the fuzzy photo-
metric neighborhood ep
phot
ignore the spatial location
of the pixels p
i
.
By analogy to the fuzzy spatial neighborhood, the
Gaussian distribution also permits to give another def-
inition of ep
phot
. The support of the fuzzy set remains
W
p
. But the distance dist
phot
is computed in the pho-
tometric space (e.g. Euclidean distance). Then the
membership function is defined by:
µ
phot
(i) = exp
−
dist
2
phot
(I(p), I(p
i
))
2σ
2
phot
(3)
where σ
phot
is the standard deviation of the Gaussian
distribution in the photometric domain.
Because of the noise, I(p) could be inappropriate
as the center of a photometric neighborhood. There-
fore we propose another approach for defining a fuzzy
photometric neighborhood of p.
2.3 Fuzzy Neighborhood based on
Density
For each pixel q in W
p
ep
q
phot
is a fuzzy neighborhood
of p centered on I(q). The membership functions of
ep
q
phot
are defined by:
µ
q
phot
(i) = exp
−
dist
2
phot
(I(q), I(p
i
))
2σ
2
phot
(4)
where q ∈ W
p
. These N fuzzy sets are aggregated
using the arithmetic mean of their membership func-
tions. Then the function µ
dens
we obtain corresponds
to a local estimation of a probability density func-
tion (PDF). Improving PDF estimation we preserve
against outliers and noise by ruling out ep
p
phot
(i.e.
ep
phot
) when estimating the density (Herbin and Bon-
net, 2002). The membership function of this new
fuzzy set based on density is defined by:
µ
dens
(i) =
1
C
∑
q∈W
p
,q6=p
µ
q
phot
(i) (5)
where C is a normalization coefficient. This paper
proposes this approach through robust density estima-
tion to define a new fuzzy photometric neighborhood.
2.4 Bilateral Approach of Fuzzy
Neighborhood
To keep the advantage of both spatial and photomet-
ric approaches, the t-norms (Bouchon-Meunier,1995)
(i.e. a conjunction operator) permit to combine the
fuzzy spatial neighborhood and the fuzzy photomet-
ric neighborhood. Tomasi and Manduchi (Tomasi and
Manduchi, 1998) use the algebraic t-norm for com-
puting their bilateral filter. Then the membership val-
ues of ep
bilat
is defined by:
µ
bilat
(i) = µ
spat
(i) × µ
phot
(i) (6)
FCTA 2011 - International Conference on Fuzzy Computation Theory and Applications
442

In this paper, we use the classical minimum oper-
ator as t-norm combining both spatial and photomet-
ric density-based neighborhoods. The fuzzy bilateral
neighborhood ep
bidens
we propose is the conjunction
of these two fuzzy sets. Therefore the membership
function µ
bidens
is defined by:
µ
bidens
(i) = min
µ
spat
(i), µ
dens
(i)
. (7)
3 DEFUZZIFICATION
The goal of this section is to estimate the filtered
value I
∗
(p) from the fuzzy neighborhoods of p. This
step corresponds to a defuzzification process (see a
review of the defuzzification methods in (Leekwijck
and Kerre, 1999)). The defuzzification is obtained us-
ing two stages: the first one operates in the spatial do-
main and the second one operates in the photometric
domain.
The most classical defuzzification method is based
on the maximum of membership values. In the con-
text of multicomponent images, the maxima method
in the spatial domain consists in selecting the pixel p
i
for which the membership value µ(i) is maximal. Let
p be this pixel defined by:
p = arg max
p
i
∈W
p
µ(i)
(8)
In this paper, the membership function µ
bidens
is used
to determine p. Therefore p corresponds to the mode
of our density estimation.
Another usual defuzzification method consists in
computing the center of gravity of a fuzzy set where
the weights are the membership values. This method
is used in the photometric domain. I(p) is considered
as the center of the fuzzy photometric neighborhood
of p. Then the filtered value I
∗
(p) is defined by:
I
∗
(p) =
1
∑
1≤i≤N
µ
p
phot
(i)
∑
1≤i≤N
µ
p
phot
(i)I(p
i
) (9)
Indeed this barycenter inside the windowW
p
is the fil-
tered value we propose to reduce noise in multicom-
ponent images.
4 APPLICATION TO COLOR
IMAGES
To assess our method, we use color images with
three components: Red, Green and Blue. Images are
(a) Reference Image (Parrots)
(b) Noised Image
(c) Vector Median Filter
(d) Bilateral Filter
(e) Density-based Filter
Figure 1: Comparison of noise reduction filters: (a) Refer-
ence image (Parrots), (b) Part of Noised image (Noised),
(c) Vector Median filtered image (VM), (d) Bilateral fil-
tered image (BILAT), (e) Fuzzy Density-based filtered im-
age (DENS).
corrupted with two kinds of independent and identi-
cally distributed noise. A low level noise is designed
through additive Gaussian noise, and high level noise
is modeled by impulse noise. The goal is to reduce
both low level noise and high level noise by filtering
corrupted images.
The classical mean squared error (MSE) evaluates
the results by averaging the squared differences of fil-
tered and reference images. In this context MSE is
defined by:
MSE(I
∗
) =
1
#I
∑
p∈I
dist
phot
(I
∗
(p), I(p))
2
(10)
where #I is the number of pixels of the images. We
A FUZZY SCHEME FOR IMAGE NOISE REDUCTION
443
separate MSE into two parts MSE
−
and MSE
+
.
MSE
−
is defined by:
MSE
−
(I
∗
) =
1
#I
−
∑
δ(p)≤T
δ
2
(p) (11)
where I
−
= {p : δ(p) ≤ T}, and MSE
+
is defined by:
MSE
+
(I
∗
) =
1
#I
+
∑
δ(p)>T
δ
2
(p) (12)
where I
+
= {p : δ(p) > T} . In this paper, the thresh-
old T = 10 is used to separate low levelnoise and high
level noise.
Table 1: Assessments of noised image (Noised), vector me-
dian filtered image (VM), bilateral filtered image (BILAT)
and fuzzy density-based filtered image (DENS) using MSE
with 388, 112 pixels, MSE
−
with N
−
pixels, and MSE
+
with N
+
pixels (N
+
+ N
+
= 388, 112).
Image MSE MSE
−
N
−
Noised 2873.6 256,921 46.1
VM 98.2 338,773 32.9
BILAT 2803.0 336,865 28.6
DENS 69.0 370,588 21.3
Image MSE MSE
+
N
+
Noised 2873.6 131,191 8410.9
VM 98.2 49,339 545.6
BILAT 2803.0 51,247 21040.3
DENS 69.0 17,524 1077.5
In this paper, the filtering windows has 5× 5 pix-
els. Estimating the density in the photometric space,
a large value of σ
phot
is prefered for smoothing PDF
estimation. Then we use σ
phot
= 30.0. In the spatial
domain, σ
spat
is empirically determined (σ
spat
= 0.5).
In the defuzzification process, σ
phot
value controls the
smoothing when filtering. The value which gives the
best results is σ
phot
= 10.
Evaluating the results, we compare a corrupted
image (Noised), a classical bilateral filtered image
(BILAT), a vector median filtered image (VM) and
our fuzzy density-based filtered image (DENS). Ta-
ble 1 gives the mean square errors obtained when as-
sessing the noise reduction. These results show that
the bilateral filter is inappropriate in the case of high
level noise (i.e. outliers) and vector median filter can-
not smooth enough the image for reducing low level
noise when preserving the edges. Figure 1 confirm
these results.
The defuzzification process uses a weighted mean
of the photometric vectors which permits to smooth
the image. The higher σ
phot
value, the smoother
the image. If σ
phot
is too small, then the filter does
not smooth the filtered image. Therefore it does not
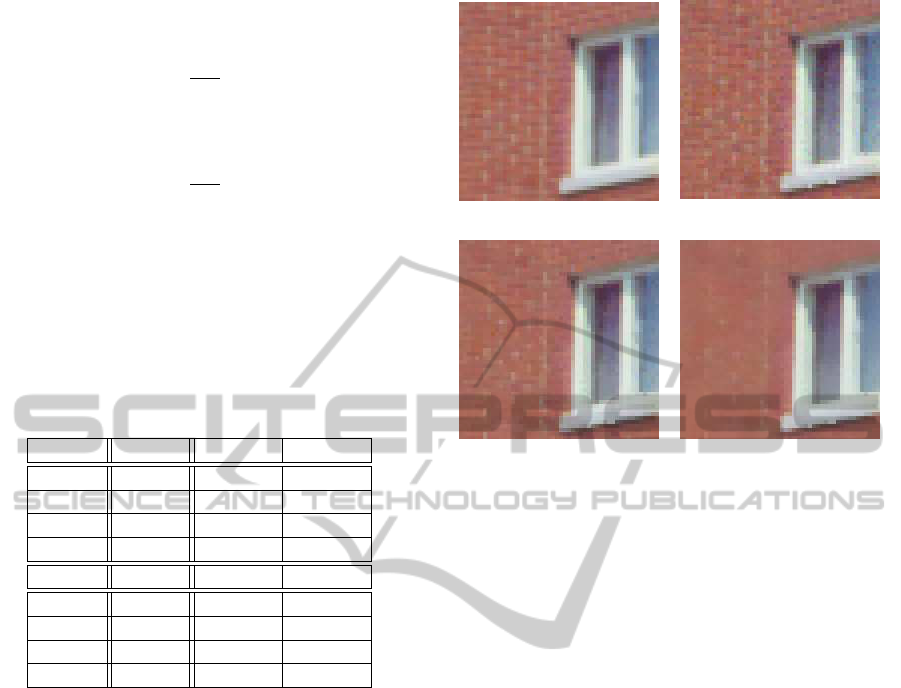
(a) Reference
(b) σ
phot
= 5
(c) σ
phot
= 10 (d) σ
phot
= 20
Figure 2: Reducing noise and level of texture: (a) part of
a reference image and fuzzy density-baser filtered images
with (b) σ
phot
= 5, (c) σ
phot
= 10, (d) σ
phot
= 20.
enough reduce low level noise. If σ
phot
is too large,
the fine details could disappear when filtering because
of a too large smoothing. Figure 2 displays the results
obtained with σ
phot
= 5, σ
phot
= 10, and σ
phot
= 20.
The value σ
phot
= 10 gives convenient results be-
tween smoothing for reducing low levelnoise and pre-
serving details.
5 CONCLUSIONS
This paper adapts the classical fuzzy scheme for data
analysis in the framework of noise reduction for mul-
ticomponent images. This scheme consists in a data
fuzzification following by a defuzzification allowing
the decision. The approach we propose is based on
first the selection of adaptive fuzzy neighbourhoods
of the pixels (i.e. the fuzzification) and second a de-
fuzzification taking into account both spatial and pho-
tometric aspects of images. This fuzzy logic approach
allows us to model the most classical filters used in the
framework of image processing. Therefore this fuzzy
scheme offers new angles for noise reduction of mul-
ticomponent images. The new density-based filter we
propose reduces both high level noise (impulse noise)
and low level noise (Gaussian noise). Like Bilateral
filter, our filter reduces low level noise preserving de-
tails because its anisotropic nature. But it is also as
robust against outliers (i.e. high level noise) as the
FCTA 2011 - International Conference on Fuzzy Computation Theory and Applications
444

vector median based filters are. Therefore the fuzzy
scheme permits us to design a new filter taking into
account the advantages of two classic filters for re-
ducing both high and low level noise.
REFERENCES
Astola, J., Haavisto, P., and Neuovo, Y. (1990). Vector me-
dian filters. IEEE Proceedings, 78:678–689.
Bouchon-Meunier, B. (1995). La logique floue et ses appli-
cations. Addison-Wesley, Paris.
Bovik, A. (2000). Handbook of image and video processing.
San Diego, CA, Academic Press.
Camarena, J.-G., Gregori, V., Morillas, S., and Sapena, A.
(2010). Two-step fuzzy logic-based method for im-
pulse noise detection in colour images. Pattern Recog-
nition Letters, 31:1842–1849.
Detyniecki, M. (2001). Mathematical aggregation operators
and their application to video querying. In Research
Report, LIP6, PARIS.
Gallegos-Funes, F. and Ponomaryov, V. (2004). Real-time
image filtering scheme based on robust estimators
in presence of impulsive noise. Real-Time Imaging,
10:69–80.
Gonzales, R. and Woods, R. (1992). Digital Image Process-
ing. Addison-Wesley, USA.
Herbin, M. and Bonnet, N. (2002). A new adaptive ker-
nel density estimation. In Information Processing and
Management of Uncertainty (IPMU), Annecy.
Kotropoulos, C. and Pitas, I. (2001). Nonlinear model-
based image/video processing and analysis. New
York, NY, Wiley.
Leekwijck, W. V. and Kerre, E. (1999). Defuzzifica-
tion: criteria and classification. Fuzzy Sets System,
108(2):159–178.
Lin, R. and Hsueh, Y. (2000). Multichannel filtering by
gradient information. Signal Processing, 80:279–293.
Lukac, R., Smolka, B., Plataniotis, K. N., and Venet-
sanopoulos, A. N. (2006). Vector sigma filters for
noise detection and removal in color images. Journal
of Visual Communication and Image Representation,
17:1–26.
Morillas, S., Gregori, V., and Herv´as, A. (2009). Fuzzy peer
groups for reducing mixed gaussian-impulse noise
from color images. IEEE Transactions on Image Pro-
cessing, 18(7):1452–1466.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In Proceedings of IEEE Con-
ference on Computer Vision, Bombay, India.
Ville, D. V. D., Nachtegael, M., der Weken, D. V., Kerre, E.,
Philips, W., and Lemahieu, I. (2003). Noise reduction
by fuzzy image filtering. IEEE Transaction on Fuzzy
Systems, 11(4):429–436.
Wong, W., Chung, A., and Yu, S. (2004). Trilateral filtering
for biomedical images. In IEEE proceedings.
A FUZZY SCHEME FOR IMAGE NOISE REDUCTION
445
