
EVOLUTIVE AND ACO STRATEGIES FOR SOLVING
THE MULTI-DEPOT VEHICLE ROUTING PROBLEM
H. I. Calvete
1
, C. Gal
´
e
2
and M. J. Oliveros
3
1
Dpto. de M
´
etodos Estad
´
ısticos, IUMA, Universidad de Zaragoza, Pedro Cerbuna 12, 50009 Zaragoza, Spain
2
Dpto. de M
´
etodos Estad
´
ısticos, IUMA, Universidad de Zaragoza, Mar
´
ıa de Luna 3, 50018 Zaragoza, Spain
3
Dpto. de Ingenier
´
ıa de Dise
˜
no y Fabricaci
´
on, Universidad de Zaragoza, Mar
´
ıa de Luna 3, 50018 Zaragoza, Spain
Keywords:
Multi-depot vehicle routing problem, Ant colony optimization, Genetic algorithm.
Abstract:
This paper addresses the multi-depot vehicle routing problem. This problem involves designing a set of routes
in order to deliver goods from several depots to a set of geographically dispersed customers. For solving this
problem, we propose two different approaches. Both have in common the use of an Ant Colony Optimization
algorithm to construct the routes from each depot. The approaches differ in the manner in which depots are
dealt with in terms of how customers are assigned to depots. In the first method, called ACO-MDVRP, the
customer assignment process is controlled by the ant colony by adding a super-depot which is connected with
each depot by arcs with zero unit cost. The second method, called GA-MDVRP, is a hybrid algorithm in the
sense that an Ant Colony Optimization algorithm is embedded in a genetic algorithm. In order to construct a
feasible solution, the procedure uses a genetic algorithm to assign customers to depots. Then, under the given
data on each depot, the corresponding vehicle routing problems are solved by using Ant Colony Optimization.
1 INTRODUCTION
The vehicle routing problem (VRP) consists of de-
signing a set of routes for serving a number of geo-
graphically dispersed customers from a central depot.
The objective is to minimize total distance or total
travel time. In this problem customer demand is fixed
and known in advance, vehicles are assumed to be
identical and cannot be overloaded, all routes start and
end at the depot and each customer is visited exactly
once by a single vehicle. Due to its theoretical and
practical importance, a lot of effort has been devoted
to solve this problem (Laporte, 2009). A lot of vari-
ants of the VRP have been proposed in the literature to
model more precisely real systems. The VRP and its
variants are NP hard and, usually, only small instances
can be solved to optimality within reasonable com-
putational time. Although some exact methods have
been proposed to solve the VRP, most techniques de-
scribed in the literature are heuristics or metaheuris-
tics which aim to provide cuasi-optimal solutions in
acceptable computational times.
A well known variant of the VRP is the multi-
depot vehicle routing problem (MDVRP). In this
problem a company owns several depots from which
it can serve the customers. There is a fleet of vehicles
based at each depot. Each vehicle starts from one de-
pot, services a set of the customers assigned to that de-
pot and returns to the same depot. The objective of the
problem is to service all customers while minimizing
the total travel time. The MDVRP arises naturally in
a large variety of contexts and has considerable eco-
nomic importance. We refer the reader to (Renaud
et al., 1996) and (Cordeau et al., 1997) for more in-
depth discussion and details regarding the structure
and formulation of the MDVRP. Recent algorithms
for this problem or some variants have been proposed
in (Crevier et al., 2007; Giosa et al., 2002; Pisinger
and Ropke, 2007) and (Tansini and Viera, 2006).
When solving the MDVRP two decisions are
made: 1) how customers are assigned to depots and
2) which delivery routes are constructed. Therefore,
most methods developed in the literature to solve
the MDVRP propose a two-phase approach. In the
first phase, customers are assigned to depots, usually
according to distance. In the second phase, routes are
constructed. Moreover, in order to improve the solu-
tion, different strategies of either relocating customers
in a route or transferring customers from a route to an-
other can be applied.
In this paper we propose two different meta-
heuristic procedures for solving the MDVRP: ACO-
73
I. Calvete H., Galé C. and J. Oliveros M..
EVOLUTIVE AND ACO STRATEGIES FOR SOLVING THE MULTI-DEPOT VEHICLE ROUTING PROBLEM.
DOI: 10.5220/0003673400730079
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2011), pages 73-79
ISBN: 978-989-8425-83-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

MDVRP and GA-MDVRP. Both have in common the
use of an Ant Colony Optimization (ACO) algorithm
to construct the routes from each depot. ACO is one
of the most powerful metaheuristics developed for
solving complex and large combinatorial problems
(Dorigo and St
¨
utzle, 2004; Dorigo and St
¨
utzle, 2010).
It is inspired by real behavior of ants when looking
for food. Ants are able to communicate information
about food sources by laying a chemical pheromone
trail on the ground which guides other ants. First
ACO algorithms were proposed in the early 1990s for
solving the traveling salesman problem. Since then,
several variants and extensions have been developed
and a variety of optimization models have been solved
by using ACO algorithms. Concerning the MDVRP,
(Calvete et al., 2011) study a complex hierarchical
production-distribution planning problem which has
embedded a MDVRP. They propose an ACO algo-
rithm for solving the MDVRP in which a super-depot
is added and connected with each depot by arcs with
zero unit cost. (Yu et al., 2011) introduce also a virtual
central depot and transform the MDVRP into a VRP
with this virtual depot as the origin. Then they solve
this VRP by using a parallel improved ACO.
The ACO-MDVRP method proposed in this pa-
per follows previous line of thinking and introduces a
super-depot node connected at zero cost with the de-
pots. In this method, there is no initial assignment
of customers to depots. Instead, every ant starts at
the super-depot and selects the real depot to visit first.
From this depot, a route is built which serves a set of
customers. This set of customers is assigned to that
depot. The GA-MDVRP method is based on the two-
phase methodology. Hence, a genetic algorithm deals
with the problem of assigning customers to depots.
Having made this decision, as many VRP as depots
are solved by using an ACO algorithm. The paper is
organized as follows. Section 2 states the problem.
In Section 3 the algorithms are developed. Section 4
goes on to analyze the computational performance of
the procedures on a set of benchmark problems. Fi-
nally, conclusions are presented in Section 5.
2 THE MULTI-DEPOT VEHICLE
ROUTING PROBLEM
Let G = (N ,A) be a directed network where N =
{d
1
,. . .,d
L
,1,2, ... ,n} is the set of nodes and A =
{(i, j) : i, j ∈ N } is the set of directed arcs. Node
d
l
represents the location of depot l, l = 1, ..., L.
Nodes 1 to n represent customer locations. Each arc
(i, j) ∈ A refers to a direct connection from i to j and
has an associated non-negative travel time t
i j
. We as-
sume that no routes connect depots to each other, so
there is no arcs (i, j) with i, j ∈ {d
1
,. . .,d
L
}.
We assume that there is a fleet of identical vehi-
cles with fixed capacity U. Each vehicle is located
at the depot from which its route starts. The route of
each vehicle starts and ends at the same depot. Ve-
hicles are assumed not to be overloaded, hence to-
tal demand of all customers on one particular route
must not exceed the capacity of the vehicle assigned
to this route. Moreover, for every vehicle route, its to-
tal route length must not exceed a given bound usually
due to working time restrictions.
We assume that a fixed quantity of goods q
i
has
to be delivered at customer i. This quantity is known
when delivery routes are established. Delivery at cus-
tomer i requires a service time s
i
. This delivery cannot
be divide up amongst vehicles, i.e. every customer
is served by a single vehicle and it is visited exactly
once. Therefore, it is assumed that q
i
6 U for all
i = 1,.. .,n. Otherwise, the corresponding customer
could not be served.
Let R be a feasible solution, i.e. R is a set
of routes verifying above constraints. Let R =
{d
l
,i
1
,i
2
,i
3
,. . .,i
k
,d
l
} be a route in R which starts
at depot d
l
and sequentially visits customers i
j
, j =
1,. . .,k.
In order to be a feasible route, working hours reg-
ulations have to be met:
t
d
l
i
1
+ s
i
1
+t
i
1
i
2
+ s
i
2
+ · ·· + s
i
k
+t
i
k
d
l
≤ t
w
(1)
where t
w
refers to the maximum duration of a route.
Moreover, bearing in mind that vehicles cannot be
overloaded:
q
i
1
+ q
i
2
+ · ·· + q
i
k
≤ U (2)
The MDVRP consists of determining a set of
routes that minimizes the total travel time. A route
involves information about the depot in which the ve-
hicle is located, the customers which are visited and
the order in which they are visited.
3 ALGORITHMS
Both algorithms developed in this paper to solve
the MDVRP use artificial ants to build feasible so-
lutions. As indicated above, a feasible solution is a
set of routes which visit all customers and satisfy the
constraints (1) and (2). Each route must start and end
at one depot. Each ant constructs a feasible solution
and, when moving, lays a pheromone trail. This trail
and the heuristic information are used to guide next
movements of ants based on a stochastic rule.
At the end of every iteration, a number of feasible
solutions are available. The size of the ant colony in
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
74

each iteration is one of the algorithm parameters and
is fixed a priori. Then, total travel time of these so-
lutions is compared with the best-so-far solution and
the best one is selected. This new best-so-far solu-
tion is used to guide other ants by depositing a quan-
tity of pheromone on its arcs. The customer selection
process and the guide process are main characteristics
of ACO algorithms. Following subsections explain in
more detail these processes for each of the algorithms
proposed.
3.1 The ACO-MDVRP Algorithm
The idea of this method is to add a super-depot node
which is connected with each real depot by arcs with
zero unit cost. As a consequence, the original MD-
VRP is transformed into a VRP with the super-depot
acting as the central depot. Hence, the first ‘cus-
tomer’ of every route is selected from the set of de-
pots {d
1
,. . .,d
L
}. Afterwards, the route successively
selects the following customer from the set of acces-
sible customers not yet visited. Only when the route
leaves the real depot, real customers can be added to
the route. Summarizing, in this algorithm a depot is
assigned to each route in the same way as customers.
There is no a priori assignment of customers to de-
pots.
3.1.1 Initialization
In order to construct an initial feasible solution, in
the implementation of the algorithm we have used
a variant of a nearest neighbor heuristic. First, the
real depot which is reached from the super-depot is
randomly selected. Second, the first customer of the
route is randomly selected amongst the reachable cus-
tomers from the depot. Then, while it is possible to
add a customer to the route, the nearest customer to
the incumbent customer is selected according to travel
time. When it is not possible to add a new customer
to the route, the artificial ant returns to the same depot
from which the route started and then goes back to
the super-depot. From the super-depot the ant starts a
new route.
This process continues until every customer has
been visited. It is worth mentioning that this vari-
ant of the nearest neighbor heuristic, which involves a
random selection in the first steps, allows us to build
different initial solutions. This feature will be used to
improve the performance of the algorithm.
Once an initial solution has been computed, main
parameters of the algorithm are initialized. Let
e
T the
total travel time of the initial solution and τ = 1/n
e
T .
In the implementation of the algorithm, the initial
pheromone trail is set to τ
i j
= τ, (i, j) ∈ A; τ
0l
= τ,
l = 1,... ,L where index 0 denotes the super-depot.
The heuristic information is set to η
i j
= 1/t
i j
, (i, j) ∈
A; η
0l
= 1, l = 1,.. .,L. Let M denote the size of the
colony of ants in each iteration.
3.1.2 Main Iteration
In every iteration, each of M ants constructs a feasi-
ble solution of the MDVRP. For this purpose, the ant
selects the next node (a real depot at the beginning, a
real customer afterwards) to be visited by applying the
pseudo-random-proportional rule. Let i be the incum-
bent node and N
i
be the set of reachable customers
from i not yet visited. Let Q be generated from a uni-
form random variable in the interval (0, 1). Then, if
Q 6 Q
0
, j ∈ N
i
is selected as:
j = argmax
h∈N
i
{τ
ih
(η
ih
)
β
}
where β is a parameter which determine the relative
influence of the heuristic information.
If Q > Q
0
the ant chooses to go to customer j ∈ N
i
with probability:
p
i j
=
τ
i j
(η
i j
)
β
∑
h∈N
i
τ
ih
(η
ih
)
β
Pheromone trails are updated locally and globally
in order to guide future ants to get improved solutions.
Immediately after the ant has crossed the arc (i, j), the
pheromone trail of this link is updated by using the
expression
τ
i j
= (1 − ξ)τ
i j
+ ξτ, 0 < ξ < 1
where the parameter ξ reflects the tendency towards
exploration. The goal of this local pheromone trail
updating is to make this arc less desirable for the fol-
lowing ants in order to encourage the exploration of
arcs not yet visited.
Having built the M ants their feasible solution, the
best-so-far solution is selected. At this moment, it is
very useful to apply local search methods to improve
the quality of the solution selected. We have imple-
mented the 2-opt intra routes and the 2-opt inter route
procedures (Br
¨
aysy and Gendreau, 2005). To end the
iteration, a global updating of the pheromone trail is
performed. Some pheromone is added to the arcs of
the best-so-far solution by using the expression:
τ
i j
= (1 − ρ)τ
i j
+ ρ
e
τ, 0 < ρ < 1
where
e
τ is the inverse of the total travel time of the
best-so-far solution. The parameter ρ reflects the
speed of the pheromone evaporation.
EVOLUTIVE AND ACO STRATEGIES FOR SOLVING THE MULTI-DEPOT VEHICLE ROUTING PROBLEM
75

In order to improve the convergence of the algo-
rithm and avoid stalling problems, we also propose a
reinitialization of the algorithm after a number of it-
erations without decreasing the total travel time. Tak-
ing into account that the initial solution will be usu-
ally different due to the variant of the nearest neighbor
heuristic implemented, the reinitialization process im-
proves the exploration of different feasible solutions.
3.2 The GA-MDVRP Algorithm
In contrast to the previous algorithm, in the GA-
MDVRP algorithm customers are assigned to de-
pots before the construction of routes starts. More-
over, this process is controlled by a genetic algo-
rithm (GA). GA are stochastic search techniques in-
spired by natural biological evolution. They were in-
troduced by (Holland, 1975). When applying GA to
solving a problem, each solution is encoded as a string
of symbols which is called chromosome. Each posi-
tion in the string is a gene and its value is the allele
value. Each chromosome has a fitness value associ-
ated which measures its quality, usually in terms of
the objective function.
To start the algorithm, an initial population of
chromosomes is generated and the fitness of each
chromosome is computed. The size p of this popula-
tion is a parameter of the algorithm. In each iteration,
a new population is generated. New chromosomes are
formed by combining chromosomes from the current
population (parents) using a crossover operation or by
modifying a chromosome using a mutation operation.
After evaluating the fitness of the resulting chromo-
somes, some of the chromosomes of the old popula-
tion and some new chromosomes (offspring) are se-
lected to form the new population. Some variants of
the selection procedure have been proposed in the lit-
erature. The most common is the elitist strategy in
which the best p chromosomes in terms of fitness are
kept from one generation to the next. The algorithm
proceeds by building populations until the stopping
condition is met.
To solve the MDVRP, we have developed a GA
aiming to find good customer assignments to depots
that lead to good solutions of the MDVRP in accept-
able computational times. The idea underlying the
proposed GA is to associate chromosomes with as-
signments. A gene corresponds to a customer and
the allele value indicates the depot which serves him.
The fitness of a chromosome is the value of the to-
tal travel time of the solution of the MDVRP obtained
by putting together the best solutions provided by an
ACO algorithm applied to each of the L VRPs arisen
when considering each depot and its assigned set of
customers.
3.2.1 Initialization
The initial population is formed by p chromosomes.
Several routines for selecting the members of this
initial population can be envisaged. For instance, a
chromosome can be constructed by assigning each
customer to its nearest depot. Another possibility is
to assign the customer to a depot at random. This
possibility could also limit the number of customers
assigned to each depot or not. Initially, two rou-
tines were implemented in the algorithm: Nearest
depot and completely random assignment. The first
one usually gives a good chromosome from the fit-
ness point of view. However, random assignment
provides very bad chromosomes. Hence, in order
to have more promising chromosomes in the initial
population we implemented a routine in which ev-
ery customer has the possibility of being assigned
only to a set of depots which are close to him. In
order to define the closeness of a depot, let t
max
=
max{t
id
l
: (i,d
l
) ∈ A;i = 1,... ,n;l = 1,. ..,L} and
t
i
min
= min{t
id
l
: (i,d
l
) ∈ A; l = 1, ..., L}, i = 1,. ..,n.
The depot d
l
is close to the customer i if
t
id
l
−t
i
min
6
t
max
4
Then, the customer i is randomly assigned to one of
the depots close to him.
To evaluate the fitness of each chromosome, we
compute a good solution of the MDVRP bearing
in mind the customer assignment determined by the
chromosome. For this purpose, we propose to solve
the VRP associated to each depot by using an ACO al-
gorithm. The description of this algorithm is similar
to the one given in Section 3.1. Instead of a super-
depot, L depots and n customers, there is one depot,
say d
l
, and n
l
customers (those previously assigned to
d
l
). Let T
l
be the total travel time of the best solu-
tion provided by the ACO algorithm after solving the
VRP corresponding to the depot d
l
. The fitness of a
chromosome C is
f (C) =
L
∑
l=1
T
l
3.2.2 Main Iteration
The GA proceeds by performing crossover, mutation,
evaluation and selection, until the stopping condition
is met. In each generation a population formed by p
chromosomes is maintained. In the crossover process,
chromosomes are selected from the source population
and combined to form offspring which are potential
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
76

members of the successor population. A chromosome
of the current generation is selected for the crossover
operation with probability p
c
. The parents selected
are taken in pairs to provide offspring. Let us assume
that there are 4 depots and 10 customers. Let the two
parents selected be:
Parent 1:
1 2 1 1 3 4 1 2 4 3
Parent 2:
3 3 1 2 1 4 1 3 1 3
Then a location is randomly selected (for example the
seventh one) and the right-hand indices are exchanged
in pairs:
Parent 1:
1 2 1 1 3 4 1 3 1 3
Parent 2:
3 3 1 2 1 4 1 2 4 3
After crossover, the mutation operation is carried
out. A chromosome of the current population is se-
lected for the mutation operation with probability p
m
.
Once it has been selected, several customers are ran-
domly selected from the chromosome and a depot is
randomly assigned to each of them.
After mutation, the fitness of the new chromo-
somes obtained from crossover and mutation is com-
puted. The offspring are added to the current popula-
tion and the whole set of chromosomes is passed on
to the selection step. We use the elitist strategy which
selects the best p chromosomes of the current set of
chromosomes available (current population plus off-
spring resulting from the crossover and mutation op-
erations). These chromosomes form the population of
the next iteration.
The population size, the probability of crossover,
the probability of mutation, the number of genes af-
fected by the mutation operation and the stopping
condition are control parameters of the algorithm
which have to be set in the beginning.
4 COMPUTATIONAL
EXPERIMENT
The performance of the algorithms has been
tested on the set of MDVRP benchmark instances
of (Cordeau et al., 1997), which can be found
in http://neumann.hec.ca/chairedistributique/data/.
The ten problems vary in size from 48 to 288 retailers
and have 4 or 6 depots. Table 1 displays the charac-
teristics of the problems and the total travel time of
the best known solution http://neo.lcc.uma.es/radi-
aeb/WebVRP.
The purpose of the experiment was twofold. On
the one hand, to check the algorithm efficiency in
terms of the closeness of the best solution provided
by each algorithm to the best known solution. On
the other hand, to compare both algorithms aiming
Table 1: Description of problems and total travel time of the
best known solution.
Problem # of customers # of depots f
bk
1 48 4 861.32
2 96 4 1288.37
3 144 4 1782.58
4 192 4 2072.52
5 240 4 2343.66
6 288 4 2675.16
7 72 6 1085.61
8 144 6 1666.60
9 216 6 2153.10
10 288 6 2811.49
to conclude which one seems to have a better per-
formance. The experiments were performed on a PC
Core Quad 6600 at 2.4 GHz having 4 GB of RAM un-
der Windows 7. Both algorithms were coded in C++
using Borland Builder. For each problem five runs
with each algorithm were done.
Based on pilot testing, the general parameters of
the ACO-MDVRP algorithm have been set to ξ = ρ =
0.1, β = 2 and Q
0
= 0.5. Taking into account that
better solutions are obtained when combining ACO
algorithms with local search algorithms, we have im-
plemented the 2-opt intra routes and the 2-opt inter
routes local search procedures. These methods are ap-
plied to the best-so-far solution at the end of each iter-
ation. Reinitialization of the algorithm, as explained
in 3.1.2 is carried out after two iterations without ob-
jective function improvement. The number M of ants
in each iteration has been set to 50. The termina-
tion condition of this algorithm is established in terms
of computing time. In order to compare both algo-
rithms, the ACO-MDVRP algorithm is assigned for
each problem a computing time similar to that used
by the GA-MDVRP algorithm in the same problem.
Regarding the GA-MDVRP algorithm, each run
consists of eight iterations, the population size is p =
4, the probability of crossover is p
c
= 0.3, the proba-
bility of mutation is p
m
= 0.1 and the mutation oper-
ation is carried out on 5 genes (customers) randomly
selected. The general parameters of the ACO algo-
rithm applied to solve the VRP associated to each de-
pot are set to ξ = ρ = 0.1, β = 2 and Q
0
= 0.5 and lo-
cal search procedures are applied as explained above.
In this case, M = 4 ants are used in each iteration and
the ACO algorithm ends after 2 minutes of computing
time.
Tables 2 and 3 display the results of the experi-
ment. For every problem, the first column indicates
the number of the problem. Columns two and three
refer to the objective function values, that is to say
EVOLUTIVE AND ACO STRATEGIES FOR SOLVING THE MULTI-DEPOT VEHICLE ROUTING PROBLEM
77
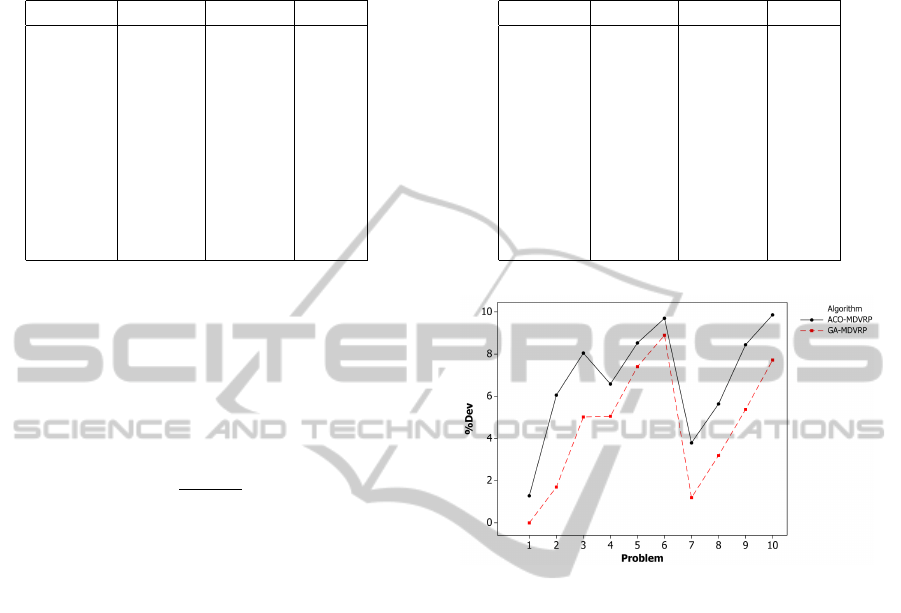
Table 2: Experimental results of the ACO-MDVRP algo-
rithm: Total travel time of the best solution f
b
, average of
the five runs
¯
f and percentage of deviation %Dev.
Problem f
b
¯
f %Dev
1 872.36 886.42 1.28
2 1366.34 1381.52 6.05
3 1926.05 1931.99 8.05
4 2208.90 2246.57 6.58
5 2543.51 2551.21 8.53
6 2934.56 2971.38 9.70
7 1126.78 1142.91 3.79
8 1760.57 1784.43 5.64
9 2334.86 2365.47 8.44
10 3088.71 3116.20 9.86
the total travel time, obtained in the five runs of each
instance. Column two shows the total travel time of
the best solution provided by the corresponding algo-
rithm and column three displays the average of the
five runs of the instance. In column four the best so-
lution obtained is compared with the best known so-
lution by using the expression
%Dev =
f
b
− f
bk
f
bk
× 100
where f
b
is the best objective function value provided
by the algorithm and f
bk
is the objective function
value of the best known solution.
From the comparison of both tables, we can de-
rive that GA-MDVRP shows a better performance
than ACO-MDVRP. In fact, GA-MDVRP provides
a better solution than ACO-MDVRP for all prob-
lems. Moreover, GA-MDVRP provides good solu-
tions to all problems since only 3 out of 10 problems
(which are the larger ones) show a deviation higher
than 5.5%, but less than 9%, from the best known so-
lution. Figure 1 shows the percentage of deviation
for both algorithms. We can see that it is higher for
ACO-MDVRP than GA-MDVRP. Moreover, %Dev
increases in both algorithms with the size of the prob-
lem, specially with the number of customers.
Finally, it is worth making some comments on the
computing time invested by both algorithms. In or-
der to be able to compare both algorithms, we carried
out the experiment with the GA-MDVRP algorithm,
took the average time invested in the five runs and as-
signed the ACO-MDVRP algorithm a similar comput-
ing time for each run. However, we observed that the
best solution of each run of the ACO-MDVRP algo-
rithm was provided in much less time than assigned.
This suggests that we could have made fewer itera-
tions when applying this algorithm, thus saving the
time invested, without, in general, losing accuracy.
Table 3: Experimental results of the GA-MDVRP algo-
rithm: Total travel time of the best solution f
b
, average of
the five runs
¯
f and percentage of deviation %Dev.
Problem f
b
¯
f %Dev
1 861.32 880.82 0.00
2 1310.20 1339.54 1.69
3 1872.02 1884.23 5.02
4 2177.19 2203.61 5.05
5 2517.14 2534.88 7.40
6 2913.02 2945.42 8.89
7 1098.56 1110.16 1.19
8 1719.78 1745.84 3.19
9 2268.83 2280.82 5.37
10 3028.47 3064.58 7.72
Figure 1: %Dev versus Problem.
5 CONCLUSIONS
The MDVRP is a generalization of the standard VRP
in which more than one depot is available to deliver
goods to a set of geographically dispersed customers.
The objective of the problem is to design a set of
routes for serving the customers while minimizing the
total travel time. Each vehicle starts from one depot,
services a set of customers and returns to the same
depot. In this paper we have develop two algorithms
for solving this problem: ACO-MDVRP and GA-
MDVRP. They differ essentially in the way in which
customers are assigned to depots.
The ACO-MDVRP algorithm does not execute an
a priori assignment of customers to depots. By in-
troducing a super-depot, the ACO-MDVRP algorithm
uses an ACO approach in which the assignment of
customers to depots is controlled by the colony of ants
and is made as the route is being built.
On the contrary, the GA-MDVRP algorithm is a
hybrid algorithm which uses GA to assign a priori
customers to depots. A chromosome is an assignment
of customers to depots. The fitness of a chromosome
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
78

is defined as the total travel time of the routes which
serve the customers assigned to each depot. For the
purpose of computing the fitness, an ACO algorithm
is applied to design the routes.
The results of the computational experiments car-
ried out using a set of MDVRP benchmark instances
indicate a better performance of the GA-MDVRP al-
gorithm. Moreover, this algorithm provides good re-
sults in terms of accuracy of the solution.
ACKNOWLEDGEMENTS
This research work has been supported by the Span-
ish Ministry of Education and Science under grant
MTM2010-17559
REFERENCES
Br
¨
aysy, O. and Gendreau, M. (2005). Vehicle routing prob-
lem with time windows, part I: Route construction
and local search algorithms. Transportation Science,
39(1):104–118.
Calvete, H., Gal
´
e, C., and Oliveros, M. (2011). Bilevel
model for production-distribution planning solved by
using ant colony optimization. Computers and Oper-
ations Research, 38(1):320–327.
Cordeau, J., Gendreau, M., and Laporte, G. (1997). A tabu
search heuristic for periodic and multi-depot vehicle
routing problems. Networks, 30:105–119.
Crevier, B., Cordeau, J., and Laporte, G. (2007). The multi-
depot vehicle routing problem with inter-depot routes.
European Journal of Operational Research, 176:756–
773.
Dorigo, M. and St
¨
utzle, T. (2004). Ant Colony Optimiza-
tion. MIT Press, Cambrigde, MA.
Dorigo, M. and St
¨
utzle, T. (2010). Ant colony optimization:
Overview and recent advances. In Gendreau, M. and
Potvin, J., editors, Handbook of Metaheuristics, pages
227–263. Springer, 2 edition.
Giosa, I., Tansini, I., and Viera, I. (2002). New assignment
algorithms for the multi-depot vehicle routing prob-
lem. Journal of the Operational Research Society,
53(9):997–984.
Holland, J. (1975). Adaptation in Natural and Artificial Sys-
tems. University of Michigan Press, Ann Arbor, MI.
Laporte, G. (2009). Fifty years of vehicle routing. Trans-
portation Science, 43(4):408–416.
Pisinger, D. and Ropke, S. (2007). A general heuristic for
vehicle routing problems. Computers and Operations
Research, 34(8):2403–2435.
Renaud, J., Laporte, G., and Boctor, F. (1996). A tabu-
search heuristic for the multi-depot vehicle rout-
ing problem. Computers and Operations Research,
23(3):229–235.
Tansini, L. and Viera, O. (2006). New measures of prox-
imity for the assignment algorithms in the mdvrptw.
Journal of the Operational Research Society, 57:241–
249.
Yu, B., Yang, Z., and Xie, J. (2011). A parallel improved
ant colony optimization for multi-depot vehicle rout-
ing problem. Journal of the Operational Research So-
ciety, 62(1):183–188.
EVOLUTIVE AND ACO STRATEGIES FOR SOLVING THE MULTI-DEPOT VEHICLE ROUTING PROBLEM
79
