
SEMANTIC INTERFACE FOR RESOURCE CONSTRAINED
WIRELESS SENSORS
Arto Ylisaukko-oja
1
, Pasi Hyttinen
2
, Jussi Kiljander
1
, Juha-Pekka Soininen
1
and Esa Viljamaa
1
1
VTT Technical Research Centre of Finland, Oulu, Finland
2
VTT Technical Research Centre of Finland, Kuopio, Finland
Keywords: Ultra-low power wireless sensors, semantic sensor web.
Abstract: In this paper, a functional implementation of a semantic interface for a resource constrained, battery
operated wireless sensor is presented. The concept is demonstrated by a home greenhouse application where
the semantic interface is applied to moisture sensors which are connected to a database. The solution is
based on M3 architecture for Smart Spaces. The paper discusses the enabling technologies that make the
semantic messaging more viable for resource constrained devices. Performance figures concerning power
consumption, battery duration and memory consumption are presented along with ideas for further
development.
1 INTRODUCTION
Providing a semantic interface for accessing
information of resource constrained wireless sensors
is still a novel concept. The objective of semantic
level interoperability is to enable meaningful sharing
of information between a variety of devices –
including situations and new applications which
have been impossible to take into account at design
time. It is hard to address such demands if e.g. the
data format and their semantics are defined and
implemented for each use case separately. Also
approaches such as device profiles have their limits
in this sense: Bluetooth device profiles, for example,
inherently assume a certain application domain, such
as audio or health device. Such an approach does not
support well any novel ways of utilizing the same
information in novel, unexpected applications.
Wireless sensors are often low capacity devices
in terms of energy, processing, communication,
physical size and cost. A typical wireless sensor is
battery operated and uses one of the standard or
proprietary radio communication technologies.
Standardized radio technologies such as IEEE
802.15.4 or Bluetooth Low Energy have low power
consumption and battery based operation as one of
the most important design criteria. These protocols
also define short message payloads – simple, short
messages are sent, preferably infrequently. The
target is to conserve battery power and achieve
reasonable times of operation before the battery
needs to be replaced. It is a challenge to apply
semantic interfaces to such devices, since memory,
processing time and message length overheads
easily increase, potentially leading to more
expensive and power-hungry devices.
The scope of the work presented in this paper
was to adapt semantic interface to a resource
constrained wireless sensor that we call an Active
Tag. The Active Tag has a radio access to a
database, where it can publish its sensor data in a
semantic form. In addition, the Active Tag can read
data from the database using similar semantic
messages. It can use this information to adjust its
own behaviour.
The aim was to achieve an implementation that
would still enable an ultra-low power
implementation from small batteries, also without
excessive component cost. This meant that
minimizing the resulting overhead was essential, to
prevent excess complexity in software and to keep
radio messages as compact as possible – only this
way can the memory requirements be kept modest
and the operation time of the battery reasonable. The
aim was to keep the power consumption in a level
that would allow several months or years operation
time in typical wireless sensor applications.
The framework for our solution was the M3
smart space architecture, for which open source
505
Ylisaukko-oja A., Hyttinen P., Kiljander J., Soininen J. and Viljamaa E..
SEMANTIC INTERFACE FOR RESOURCE CONSTRAINED WIRELESS SENSORS.
DOI: 10.5220/0003698905050511
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (SSW-2011), pages 505-511
ISBN: 978-989-8425-80-5
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

software has been developed over the last few years
(Smart-M3 in SourceForge). Some of this
development has been targeting to decreased
complexity and improved execution efficiency.
Therefore, software libraries for implementation
were available. However, they had certain limits –
especially about supported communication
interfaces – that had to be overcome when adapting
to wireless sensor domain.
The overall proof-of-concept demonstration was
implemented as a greenhouse smart space
application, where the Active Tags work as moisture
sensors in plant jars. They use semantic level, RDF
(Resource Description Framework) based messaging
to communicate via RIBS (RDF Information Base
Solution). (RDF Vocabulary Description Language
1.0). The RIBS is the central knowledge base and
semantic information broker (SIB) in the smart
space. Below the semantic communication level
there is simple data access communication between
Active Tag and RIBS. This communication follows
the smart space access protocol (SSAP), with WAX
encoding (Suomalainen and Hyttinen, 2011) that is
suitable for resource limited devices. WAX (Word
Aligned XML) and RIBS are the key technologies in
minimizing the overhead caused by the semantic
level interface.
The overall scenario includes also a Gardener
Terminal device. NFC and optical tag technologies
are used in combination with uCode technology
(Koshizuka and Sakamura, 2010) to configure the
smart space appropriately.
2 BACKGROUND AND
RELATED WORK
2.1 Semantic Web
The Semantic Web is a vision of a next generation
World Wide Web (WWW) in which the semantics
of the information is explicit and openly shared in
the Internet. Explicity and the availability of the
ontology definitions allow run-time interpretation
and new intelligent Web applications and services.
The core technologies comprising the Semantic
Web stack include Resource Description Framework
(RDF), RDF Schema (RDFS), Web Ontology
Language (OWL) and SPARQL (SPARQL,
SPARQL 1.1). Information interoperability in the
Semantic Web is based on defining common
ontologies. RDFS and OWL provide vocabularies
for describing the concepts and relationships
between these concepts, i.e., ontologies. The RDF is
used to present the ontologies in the form of a
subject, predicate and object triples, so it is a very
natural way to make statements about information.
SPARQL query language provides SQL-like query
mechanisms for RDF data. The SPARQL 1.1
expands the 1.0 version by defining also
mechanisms for path queries and for modifying the
data in RDF database. (T. Berners-Lee et al., 2001).
2.2 Semantic Sensor Networks
There are also activities focusing on utilizing
Semantic Web technologies to sensor networks. The
Semantic Sensor Web (SSW) approach targets to
improve the interoperability of sensor networks by
adding temporal, spatial, and thematic metadata to
the measurement data. The SSW aims to achieve this
by extending the OGC and SWE specifications with
Semantic Web technologies (Sheth et al., 2008).
Sense2Web is a platform for publishing and linking
sensor data to the Semantic Web (Barnaghi and
Presser, 2010). Sense2Web Linked-sensor-data
platform enables users to publish RDF serializes
information about their sensors, associate this data
with existing RDF sensor data, link their sensor data
to other resources and make the information publicly
accessible for other semantic web applications via
SPARQL endpoints. In (Patni et al., 2010) a
framework for publishing sensor data to Linked
Open Data Cloud is presented. This is achieved by
converting the sensor descriptions from SWE’s
XML based Observations and Measurements
(O&M) standard to RDF format. It is also
noteworthy that W3C’s Semantic Sensor Networks
Incubator Group (SS-XG) has started to define
ontologies for describing sensor data (W3C’s
Semantic Sensor Networks Incubator Group).
The aforementioned approaches provide
necessary technologies and valuable knowledge for
enabling semantic sensors for the IoT. However,
these approaches do not concentrate on how the real-
life constrained sensors with limited power, memory
and processing capabilities are able to present their
information in, usually very sparse, semantic format.
In addition these approaches do not present how the
sensors could utilize the available machine
interpretable data to improve their own functionality.
The main contribution presented in this paper is a
novel approach for constrained sensors to publish
and access information in semantic form. In our
approach we utilize the Semantic Web based M3
concept. M3 is an infrastructure for providing
semantic interoperability in physical environments.
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
506

We present how constrained sensors can not only
publish their information for global use in semantic
form, but also how the sensors are able to improve
their quality of service (QoS) by utilizing the
semantic information produced by other parties.
3 SYSTEM MODEL
M3 is a concept for utilizing the Semantic Web ideas
and technologies to provide semantic level
interoperability between devices in physical
environments. By utilizing the ontology based
information model the M3 based software agents can
more autonomously interpret the meaning of
information and therefore obtain greater degree of
smartness and flexibility than could be achieved
with traditional use case specific data models. M3
utilizes RDF, RDFS and OWL for presenting the
semantics of information in a computer-interpretable
manner. In the core of M3 is a functional
architecture that specifies how the semantic
information can be accessed in a physical space. The
M3 functional architecture consists of Knowledge
Processors (KP) and Semantic Information Brokers
(SIB). For SIB, we use a specific implementation
called RIBS (RDF Information Base Solution). SIBs
or RIBSs are basically shared RDF databases of
semantic information that provide publish/subscribe
based interface for KPs. The role of KPs is to
provide applications for end-users by interacting
with each other via the RIBS. Smart Space Access
Protocol (SSAP) defines the rules for KP-RIBS
interaction. M3 utilizes existing solutions for the
communication and service level meaning that it is
possible to implement the SSAP protocol with
different service and communication level
technologies.
In our case, the Active Tags are essentially KPs
in the system. In the demonstration, the Active Tags
work as intelligent moisture sensors in plant jars; the
basic idea is to indicate if the moisture of the soil is
correct. This is done by two different ways:
1. By inserting the moisture data from Active
Tags to RIBS. The gardener can read the
moisture value by his mobile terminal. The
mobile terminal is also a KP and it also has
a connection to RIBS.
2. By blinking bright LED indication in each
of the sensors in jars, giving visual location
indication for the gardener about the plants
in need of water.
The gardener presence is also inserted to the SIB:
when the gardener touches an NFC location tag, his
presence is inserted to the SIB. The Active Tags
regularly query the presence information and use
this to avoid blinking the LEDs in vain, therefore
reducing power consumption.
4 APPROACH
In this Chapter, we describe the main technical
solutions applied in the implementation of our home
greenhouse demonstration for Active Tags using
semantic interfaces.
4.1 WAX Encoding of SSAP
Word Aligned XML (WAX) is data encoding
scheme where each XML tag, attributes and user
data is packed into memory locations that are
multiples of the word length of the processor. For 32
bit processors the word length is four bytes and thus
WAX tags, attributes and data are placed into
memory using four byte alignment. Four byte
alignment allows data to be treated as byte array or
as word array. The word processing is beneficial
from the processor point of view since the arithmetic
logic units (ALU), system bus and memories are
often designed for word operations.
Word alignment means also that lengths of tags,
attributes and data are multiples of words. The
minimum length is one word and intuitively this is
the favourable length. The lengths of the tags and
attributes of the SSAP fields are four bytes each.
Since the XML end tag has three reserved characters
“<”, “/” and “>” the actual name of the tag may
contain only one character. As an example, the
WAX encoding of the SSAP message tag use letter
M, and thus start tag is “<M> “ and end tag is
“</M>“. Note that the extra space character after
“>” in the begin tag is important and required for the
word alignment.
SSAP message tag without WAX encoding use
tags “<SSAP_message>” (14 bytes) and
“</SSAP_message>” (15 bytes). As byte counts
indicate the message overhead in WAX encoding of
SSAP is 3-4 times lower than in the SSAP without
encoding. The message overhead can be eliminated
totally by removing all metadata of the SSAP
message and using for example some fixed binary
structure for the user data. While this could be
optimal for transmission and memory usage, it will
cause difficulties in interoperability since
interpretation of the messages requires a priori
knowledge of the structure of the message. In this
respect the WAX encoding is a good compromise
SEMANTIC INTERFACE FOR RESOURCE CONSTRAINED WIRELESS SENSORS
507
between semantic interoperability and size of the
message. The metadata is present, but its length is
minimized.
WAX parser may use word alignment for
speeding up the parsing process. Instead of byte
comparison, the WAX parser can use word
comparison for matching tags and attibutes. Roughly
speaking, the integer comparison is four times faster
and than byte comparison for 32-bit processor,
which is also a power consumption advantage.
Similar advantage is present also when composing
WAX message.
A huge benefit is that WAX parser is much more
compact than a generic XML parser – Expat XML
parser used in our earlier work was 206 kB of code
size – too large to even fit to the wireless sensor
platform we are next describing.
4.2 Hardware and Software Platforms
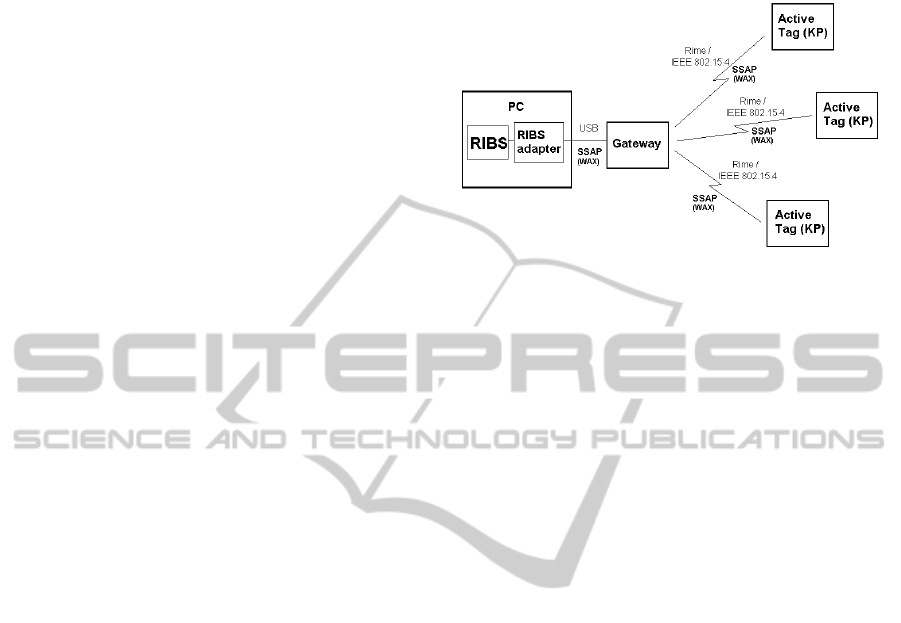
Fig. 1 shows the architecture of the KP – RIBS
network we needed to implement for our study. The
hardware and software platforms are described in the
following.
Many wireless sensor platforms that are intended
for research purposes contain 16- or 8-bit
microcontrollers such as Atmel AVR series or Texas
Instruments MSP430 series devices. However, we
ended up using a 32-bit computing platform. The
main reason for this decision is code efficiency: if
same functionality is performed with 32-bit ARM
based architecture, the resulting amount of
instructions is considerably lower than in case of 16-
bit devices, let alone 8-bit computing platforms. This
is a considerable benefit, keeping the memory
overhead caused by the program code of semantic
interface reasonably low. Although 32-bit
architectures are more power hungry per instruction
than lower word length architectures, this is very
much compensated by the shorter execution time
(assuming equal clock frequencies).
Even if more power efficient and modern
CortexM3/M0 would have been basically preferred,
we ended up choosing an ARM7 based platform by
Freescale, namely MC13224V system-on-chip that
includes ARM7TDMI-S processing core and an
IEEE 802.15.4 compatible 2.45 GHz short-range
radio transceiver. While there was a comparable,
Cortex-M3 based system-on-chip available from ST
Microelectronics (STM32W), we found that the
MC13224V with its total 96 kB divided between
program code and RAM memory gave greater
flexibility. Thus larger RAM buffers would be
possible to implement if needed, as opposed to the
fixed, 8 kilobytes RAM of STM32W. In addition,
MC13224V has the IEEE 802.15.4 MAC layer
readily implemented in ROM.
Figure 1: The star network of Active Tags connected to
RIBS.
The core of our research was the semantic
interface in a resource constrained sensor. Thus we
wanted a platform that would provide existing
support for the underlying wireless communication
mechanism. We decided to run Contiki operating
system on the MC13224V SoC: Contiki includes a
simple IEEE 802.15.4 compatible protocol called
Rime, and Contiki had been readily ported to this
platform (The MC1322x Open Source Project);
(Contiki Operating System. ANSI C was used to
write programs on Contiki OS. To avoid building
new hardware, we decided to build the Active Tag
on the MC13224V based, commercially available
platform by Redwire LLC, called Econotag.
Since IEEE 802.15.4 radio is not standard
equipment in PCs, we decided to use one Econotag
as a gateway in each network. That is, the device
containing the RIBS database needs to have an
Econotag connected to its USB port. In addition,
software had to be implemented to adapt to the
currently supported RIBS interfaces (basically only
socket connections are supported at the moment).
For this purpose, we implemented a simple PC
software program called RIBS adapter that runs in
the RIBS device, communicating with the gateway
device in the USB port and using a socket
connection to communicate the data to the RIBS.
The RIBS can be run in any PC. In our
demonstration, we had it running on a Via Artigo
A1100 compact PC. As moisture sensors in Active
Tags, we selected the VG400 sensor probes from
Vegetronix. These sensors can be powered directly
from a general-purpose IO pin of the
microcontroller. The sensor can measure water level
or moisture in soil of a plant jar.
Fig. 2 shows the Active Tag related portion of
the demonstration system. On the left, two battery
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
508
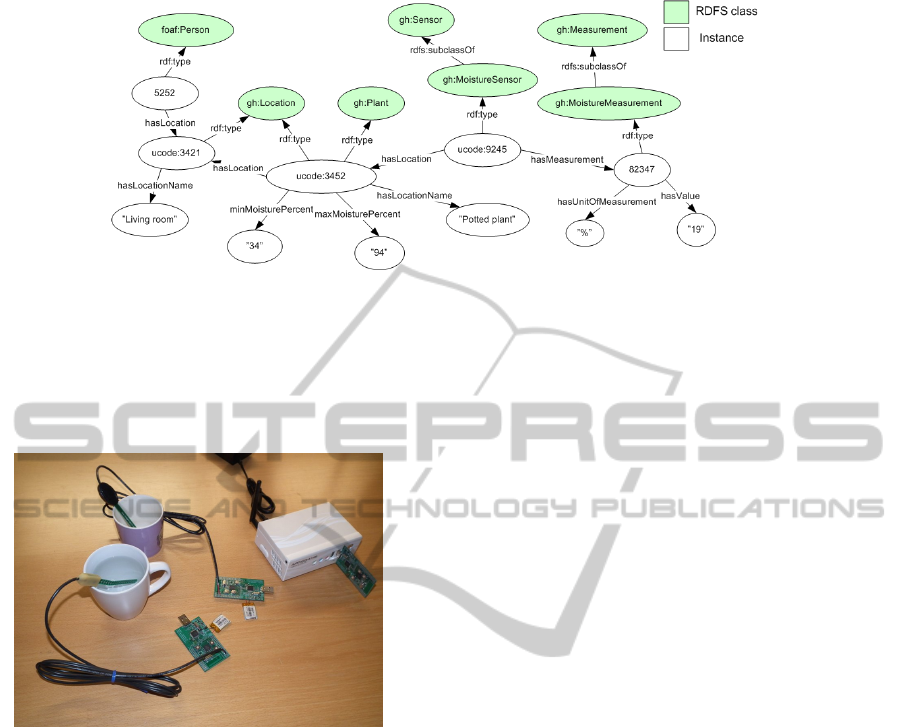
Figure 3: Ontology for Home Greenhouse.
operated Active Tags with moisture sensors are
shown. Here, the moisture sensors are measuring
water level in the coffee mugs. On the right, RIBS
PC is shown with attached Gateway to support IEEE
802.15.4 communications of the Active Tags.
Figure 2: Two Active Tags with moisture sensors and the
RIBS PC with Gateway.
4.3 Home Greenhouse Ontology
The ontology developed for the case study contains
four logically distinct physical entities: Person,
Location, Plant and Sensor. The Person class is
imported from the Friend of a Friend (FOAF)
ontology and the “foaf” namespace is thus used. For
Location, Plant and Sensor classes namespace “gh”
(form greenhouse) is used. These entities are
modelled as RDFS classes. The RDFS is used as the
ontology language because the RIBS provides RDFS
level reasoning.
The Location class presents a physical location
such as a town, house, room or pot, for example. In
this demonstration it is used to both present when
some person is in the same room with an Active Tag
(the Gardener Terminal is used for gardener
presence indication) and with which plant the Active
Tag is located in a same jar. The Plant class presents
necessary information about the plant. In this
demonstration the minimum and maximum
preferences for soil moisture are used. The actual
potted plant is modelled as an instance of both
Location and Plant classes.
The Sensor class models a physical object
capable of measuring its surroundings. Instances of
the Sensor class can be associated with a Location
class instance by using the “gh:hasLocation”
property. To allow sensor to have multiple different
measurements with different unit types the
measurements of a sensor is modelled as a separate
class. The Measurement class has properties for
presenting the value and unit of the measurement.
Subclasses for Sensor and Measurement class are
used to model the exact type of the sensor and
measurement respectfully. In this demonstration
only the MoistureSensor and MoistureMeasurement
classes are used.
Fig. 3 illustrates an example instant of the home
greenhouse ontology in the RIBS. Note that part of
the ontology description is related to the Gardener
Terminal.
4.4 Software Operation in Active Tags
To implement an ultra-low power battery operated
wireless sensor, it is essential to minimize the time
the radio is switched on. Furthermore, all the parts
should be in the deepest possible sleep mode for a
major part of time. This has effect on what publish-
subscribe methods are preferred.
The Active Tag uses insert and update
operations to publish its data along the common
ontology model (presented in the section C) into the
RIBS. Due to the nature of the greenhouse
application, this can take place quite infrequently,
such as once per minute (at least when gardener is
not present – if he is, the responsiveness of the
Active Tags can be automatically improved by
SEMANTIC INTERFACE FOR RESOURCE CONSTRAINED WIRELESS SENSORS
509

shortening the communication interval). To read
data from RIBS, we avoid subscribe, since it would
basically require the Active Tag to be ready for
communication at an arbitrary moment. Instead, the
Active Tag use query on a regular basis (following
the moisture data insert or update) to ask for
gardener presence data from RIBS. In the beginning
of operation, Active Tag also uses query for getting
the maximum and minimum moisture values from
RIBS.
Between the moisture measurement and above-
mentioned communication operations, the Active
Tag is in deep sleep mode: the microcontroller in
hibernate sleep mode and the radio and moisture
sensor being powered off. The internal RC oscillator
of the microcontroller is used as a wake-up circuit. If
a more precise wake-up circuit is needed, a low
power oscillator using a 32 kHz crystal is also
available.
5 VALIDATION
5.1 Power Consumption and Battery
Duration
The battery life of a wireless sensor is essentially
determined by the average power consumption. This
is a combination of sleep and active mode power
consumptions. To determine this, the current
consumption of the sleep mode was measured with a
digital multimeter and the active mode current was
measured with a current probe and an oscilloscope.
During the measurements, the Active Tag was
running a cycle where it wakes up, measures
moisture, inserts moisture data to RIBS, queries
gardener presence and goes back to sleep. No LED
is blinked in the test sequence.
During measurements, the Active Tag was operated
from a 3V supply without voltage regulation. This is
equivalent of using two 1.5V AA size batteries in
series without regulation. The current consumption
during sleep was measured to be 10.5 µA (all RAM
pages and microcontroller state retained). This is
equal to 32 µW. It is possible also not to retain the
microcontroller state, in which case the sleep current
was measured to be 5.1 µA.
The sleep mode consumption defines the absolute
maximum for the battery duration. For two 1.5V,
2700 mAh alkaline batteries in series the 10.5 µA
consumption yields a theoretical duration of 29 years
(self-discharge not taken into account). The practical
duration is of course further determined by the
wake-up interval and the power consumption during
the active cycle.
According to the measured current profile, the
active cycle consumes roughly 11.3 mA for the
duration of 236 ms and 28.8 mA for the duration of
388 ms. The current consumptions are at expected
levels, but the active cycle length is remarkably
long: the amount of data communicated during one
active cycle is approximately 1 kB with Rime and
IEEE 802.15.4 headers included, which takes 32 ms
of transmission/reception time. However, the time to
get a response from RIBS is now dependent on the
operation of the PC the RIBS is located in. This is
bound to increase the time the radio is kept on.
Nevertheless, the current implementation seems to
include extensive delays in operation that need to be
carefully sorted out in further development.
Despite the obvious need for optimization, we
get an average current consumption of 241 µA from
3 volts @ 60 second wake-up interval. For two 1.5V,
2700 mAh alkaline batteries in series this yields a
theoretical battery duration of 1.3 years (battery self-
discharge and LED blinking consumption not taken
into account). Even with 10 s wake-up interval we
would still get 2.7 months battery duration.
5.2 Microcontroller Resources
The resulting code size, with join, insert and query
operations enabled, was 39.7 kB. This is 26%
increase compared to a reference software that
includes only the underlying Contiki OS and the
Rime protocol – the reference software also does not
include the application software. Increase in RAM
memory use was more dramatic: from 14.3 kB in
reference software to 25.3 KB in our Active Tag
software (77% increase). RAM requirements need
further analysis in our further work.
6 CONCLUSIONS
A functional semantic interface was implemented
for a battery operated, resource constrained wireless
sensor. The sensor publishes data in a semantic
database, but also queries semantic data, adjusting
its operation accordingly.
Despite obvious need for improvement in active
cycle duration, the sensor achieves theoretical
battery duration of 1.3 years from two 1.5V AA
batteries at 60 s wakeup/communication interval.
Code size was increased by 26% compared to a
reference implementation with only Contiki OS and
radio protocol implemented (excluding the semantic
KEOD 2011 - International Conference on Knowledge Engineering and Ontology Development
510

interface and the application software). RAM
requirement increased by 77%, respectively.
One possibility to minimize radio on time could
be to use the Gateway as a message buffer in RIBS
communications, avoiding the need to wait for PC
program execution – in this case, subscribe could be
a viable alternative to query. Possibilities to
minimize message length further should also be
studied – an average WAX message length to be
sent is now 160 bytes. Binary XML is a potential
solution. Shortening the messages would make
semantic interface more viable with technologies
such as Bluetooth Low Energy that use even shorter
maximum message payloads than IEEE 802.15.4
radio.
Applying query languages such as SPARQL in a
resource constrained wireless sensor is another
possible research topic in the future.
REFERENCES
Smart-M3 in SourceForge: http://sourceforge.net/projects/
smart-m3/
RDF Vocabulary Description Language 1.0: RDF Schema,
W3C Recommendation 10 February 2004. URL:
http://www.w3.org/TR/rdf-schema/ [Accessed 14
October 2010].
Suomalainen, J., Hyttinen, P.: Security Solutions for Smart
Spaces. The Second International Workshop on
Semantic Interoperability for Smart Spaces (SISS
2011). July 18-21, 2011, Munich, Germany.
Koshizuka, N., Sakamura, K.: Ubiquitous ID: Standards
for Ubiquitous Computing and the Internet of Things.
Pervasive Computing, IEEE, 2010, pp. 98-101
T. Berners-Lee, J. Hendler, O. Lassila, “The Semantic
Web,” Scientific American Magazine, May 17, 2001.
SPARQL Query Language for RDF, W3C
Recommendation 15 January 2008. URL:
http://www.w3.org/TR/rdf-sparql-query/
SPARQL 1.1 Query Language W3C Working Draft, 12
May, 2011, URL: http://www.w3.org/TR/sparql11-
query/
A. Sheth, C. Henson, and S. Sahoo, “Semantic sensor
web,” Internet Computing, IEEE, vol. 12, no. 4, pp.
78–83, July-Aug. 2008.
Barnaghi, P. and Presser, M.: Publishing Linked Sensor
Data. In Kerry Taylor, Arun Ayyagari, David De
Roure (Eds.): The 3rd International workshop on
Semantic Sensor Networks 2010 (SSN10) in
conjunction with the 9th International Semantic Web
Conference (ISWC 2010), 7-11 November 2010,
Shanghai, China.
Patni, H.; Henson, C.; Sheth, A.: "Linked sensor data",
International Symposium on Collaborative Technolo-
gies and Systems (CTS), 2010, vol., no., pp.362-370,
17-21 May 2010.
W3C’s Semantic Sensor Networks Incubator Group home
page. URL: http://www.w3.org/2005/Incubator/ssn/
The MC1322x Open Source Project: http://mc1322x.devl.
org/
Contiki Operating System: http://www.sics.se/contiki/
SEMANTIC INTERFACE FOR RESOURCE CONSTRAINED WIRELESS SENSORS
511
