
INTERVAL AVAILABILITY ANALYSIS
OF A TWO-ECHELON, MULTI-ITEM SYSTEM
Ahmad Al Hanbali and Matthieu van der Heijden
School of Management and Governance, University of Twente, Enschede, The Netherlands
Keywords: Inventory, Spare Parts, Markov Processes, Supply Chain Management, Interval Availability.
Abstract: In this paper we analyze the interval availability of a two-echelon, multi-item system. Modeling the system
as a Markov chain we analyze the interval availability of the system. We compute in closed and exact form
the expectation and, the variance of the availability during a finite time interval [0,T]. We use these
characteristics together with the probability that interval availability is equal to one to approximate the
survival function using a Beta distribution. Comparison of our approximation with simulation shows
excellent accuracy, especially for points that are practically most relevant.
1 INTRODUCTION
Nowadays, the aftersales service business represents
a considerable part of the economy and, moreover,
is continuously growing (AberdeenGroup 2005;
Deloitte 2006).
Advanced capital goods such as MRI scanners,
lithography systems, baggage handling systems, and
radar systems, are highly downtime critical. So the
customers of these advanced goods are not just
interested in acquiring these systems at an affordable
price, but far more in a good balance between the
resulting Total Cost of Ownership (TCO) and
system productivity throughout the life cycle,
including the limitation of downtime. For customers
the system use rather than the system upkeep is their
core business. Therefore, a major part of the system
upkeep is preferably outsourced to the original
manufacturer or to a service provider that can offer a
good balance between the downtime and costs. For
that reason, service contracts are made between the
service provider and customers. These contracts
specify the services provided by the supplier with
their corresponding Service Level Agreements
(SLAs), such as the time between system failure and
time of fault resolution, and the system availability.
The SLAs are measured over a predetermined
time window, e.g., a quarter or a year. For the
service providers, it is essential that the service
levels are attained, because in some cases penalties
apply if an SLA target is violated. In case of a large
scale service contract (the average performance over
many systems is measured), the average
performance should meet the target. If the number of
systems covered by a contract is relatively small, we
have inherent statistical variability and we need an
additional buffer in performance to assure that the
probability of not meeting the SLAs over the time
window is still acceptable. We encountered such a
situation at Thales Netherlands, a manufacturer of
naval sensors and naval command and control
systems. There, a service contract typically covers a
few systems only. In the literature, this issue is
usually neglected. In this paper, we are mainly
interested in the logistical delay due to the
unavailability of spare parts. Moreover, the focus
will be on SLAs that are based on the system
availability during a predetermined period of times.
In service parts logistics there is usually a
tradeoff between the cost involved in keeping the
stocks very close to the customers sites or at a
central depot, which can supports multiple
customers at the same time. Due to the risk pooling
effect, it is more desirable from the point of a service
provider to position the stocks of spare parts
centrally. However, having a strict SLA, e.g., 99%
availability, with a customer forces the service
provider to move some spare parts closer to the
customer sites. In addition, in order to reduce the
system downtime and its critical consequences it is
usually the case that the repair of failed system is
done by replacing the failed part with a new part.
The failed part is sent to the repair shop, i.e., the
342
Al Hanbali A. and van der Heijden M..
INTERVAL AVAILABILITY ANALYSIS OF A TWO-ECHELON, MULTI-ITEM SYSTEM.
DOI: 10.5220/0003701703420348
In Proceedings of the 1st International Conference on Operations Research and Enterprise Systems (ICORES-2012), pages 342-348
ISBN: 978-989-8425-97-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

inventory is managed using the so-called base stock
policy referred to as (s-1,s)-policy. (Sherbrooke
1968) was among the first to tackle the spare part
optimization problem. He proposed the METRIC
model that is based on the maximization of system
availability subject to a constraint on the invested
budget in spare parts. METRIC model is a good
approximation in case of multi-echelon spare part
network and especially in case of high availability.
(Graves 1985) extended the METRIC model and
proposed an improved approach called VARI-
METRIC. We note that VARI-METRIC model is
used in most commercial software tools.
It is worth to mention that both METRIC and
VARI-METRIC and most spare parts management
theory are based on the maximization of the steady
state average system availability, i.e., the fraction of
time the system is operational during a very long
(infinite) period of time. However, in practice we
often see that the agreed upon availability SLA is the
average availability during a finite period, e.g.,
month, quarter, or year. Moreover, if the availability
during a period of time is lower than a specific
percentage the penalty rules then apply. This
motivates us to analyze the availability during a
finite period of time, the so-called interval
availability in reliability theory defined as follows
see, e.g., (Nakagawa and Goel 1973):
Definition: The system interval availability is
defined as the fraction of time a system is
operational during a period of time [0,T].
Note that as opposed to the steady state average
availability the interval availability is a random
variable (rv) that has a distribution.
2 RELATED LITERATURE
In this section we shall the review the existing
literature on interval availability. (Takács 1957) was
among the first to analyze the interval availability
distribution function of an on-off stochastic process.
Takács result is in the form of an infinite sum of
terms, each consisting of multiple convolutions. This
result is hard to compute numerically.
Approximation by fitting the on and off periods by a
phase type distribution with two phases was proven
to give accurate result with small computation time,
see e.g., (van der Heijden 1988). Another
approximation based on fitting the approximated
first two moments and the hundred percent and nil
probability of the interval availability in a Beta
distribution was proposed in (Smith 1997). For an
on-off two states Markov chain the first two
moments of the interval availability are derived
exactly in (Kirmani and Hood 2008). We note that in
all these previously mentioned studies the
underlying assumption is that the on periods are
independent and the off periods are independent,
moreover, all the on and off period are independent
of each other, i.e., the on-off process can be
represented by a renewal process.
(De Souza e Silva and Gail 1986) derived in
closed-form the cumulative sojourn time distribution
in a subset of states of a Markov chain during a
finite period of time. The subset of states may
represent the operational states of a system.
Therefore, the division of the cumulative sojourn
time by the period length gives right away the
system interval availability. We note that computing
the full curve of the interval availability distribution
using the result of (De Souza e Silva and Gail 1986)
is time consuming. (Carrasco 2004) proposed an
efficient algorithm to compute the interval
availability distribution for the special case of the
systems which can be modeled by an absorbing
Markov chain. Note that in the latter two papers the
renewal assumption of the on-off process is not
anymore necessary.
In this paper, we shall propose a numerically
efficient approach to compute the distribution
function of the interval availability. Our approach
builds on the result of (De Souza e Silva and Gail
1986) extensively in order to compute in closed-
form the first two moments of the interval
availability. Note that these two moments were not
derived previously in the literature for a Markov
chain with more than two states. Moreover, we will
follow a similar approach to (Smith 1997) to
approximate the interval availability by a Beta
distribution using the first two moments in addition
to the probability that interval availability is equal 1.
3 MODEL
We consider a two-echelon, multi-item supply
network. There is a single depot that supports
multiple identical systems which are located at
different bases. A system consists of multiple items
that are subject to breakdown. These items are
repairable and belong to the class of expensive slow-
movers, i.e., they have low failure rates. The depot
and the bases hold a safety stock of spares for each
item. Upon an item failure, the item is immediately
sent to the depot for repair and at the same time a
replenishment order is issued according to the (s-
1,s)-policy, where s denotes the order-up-to level.
INTERVAL AVAILABILITY ANALYSIS OF A TWO-ECHELON, MULTI-ITEM SYSTEM
343

Note that it is possible to extend our model by
allowing for repair of failed items at the bases. The
unsatisfied demand of parts is backordered. When
the replenishment order arrives at the base it is used
to fill backorders, if any. Otherwise, it is added to
the base stock. The time needed to transfer a spare
from the depot to the base is assumed to be
exponentially distributed. This assumption was
validated in (Alfredsson and Verrijdt 1999). In
Section 5, we shall numerically examine the impact
of the assumption of exponential order-and-ship
times on the interval availability distribution. We
say that the system is operational if all the items are
operational. Obviously, if an item fails and no spare
is available at the base, the system will be
malfunctioning and unavailable for use.
We consider a scenario inspired by a case study
done at Thales Netherlands. There is one naval
radar system at each of the N bases (frigate). A
system consists of M items. We assume that the j-th
item fails according to a Poisson process with rate λ
j
,
j=1,…,M. Moreover, the failure of item j is
independent of the rest of items. We assume that the
replenishment time of the i-th item at the depot is
exponentially distributed with rate
. The
replenishment time includes the time to transport the
failed item from the base to the depot and the time to
repair the item at the depot. We model the depot
repair shop as an ample server, i.e., it has an
unrestricted repair capacity. We also assume that the
transshipment time of a spare part from the depot to
the system is exponentially distributed with rate μ
0
.
Let s
ij
, i=0,…,N, j=1,…,M, denote the stock level of
item j at location i, where i=0 represents the depot
and i=1,..,M represents the i-th base. Under the
above assumption it is easily seen that the behavior
of the system over time can be modeled as a
continuous-time Markov chain. More precisely,
since there is a finite number of spare parts in the
network the continuous-time Markov chain is of
finite size. Comparing the assumptions of our model
and (VARI-)METRIC the only difference is the
exponentially distributed replenishment time and
order-and-ship time, whereas order-and-ship times
are deterministic and replenishment times have a
general distribution in (VARI-)METRIC.
Let A
i
(T), i=1,…,N, denote the interval
availability of system i during [0,T]. Our objective is
to find the survival function of A
i
(T), i.e., the
complementary cumulative distribution function of
A
i
(T). For this reason, we first compute the mean and
the second moment of the interval availability as
well as the probability that the interval availability
equals 1, i.e., P(A
i
(T)=1). Although we may also
compute the probability mass in the point zero,
P(A
i
(T)=0), this is not really useful: for practical
relevant problem instances, it will be very close to
zero. Next, using the three performance metrics as
mentioned above we approximate the survival
function of A
i
(T) by a mixture of a probability mass
at one and a Beta distribution. Throughout this
paper, we shall only focus on the interval availability
of a tagged system. For this reason, we shall drop
the index i in A
i
(T) and refer to it as A(T): the
interval availability of a tagged system at one of the
bases. In addition, we shall refer to the stock level of
item j in the tagged system as s
j
.
Since the failure processes of the different items
are independent of each other and the repair capacity
is unrestricted, the different items on the tagged
system behave mutually independent over time. Let
X
j
(t) denote the state of item j in the tagged system at
time t, i.e., X
j
(t)=1 if the item is operational at time t
and zero otherwise. Note that X
j
(t)=0 if item j fails
and there is no spare part available at the base to
replace the malfunctioning item. Let
(
)
denote
the item j pipeline of the tagged system i. That is, it
is the total number of item j backorders of the tagged
system at the depot or in transport from the depot to
the tagged system. Note that the pipeline of item j
depends on the stock on-hand at the depot.
Furthermore, the depot stock depends on the failure
processes of item j in all the systems in the installed
base including the tagged system. Let us denote N
j
(t)
the total number of failed items of type j in the depot
repair shop. Note that backorders at the depot are
served according to FIFO discipline. Therefore, if
N
j
(t)≥s
0j
, i.e., on-hand stock in the depot is equal to
zero, it is also necessary to keep track of the position
of the tagged system backorders in the depot
backorders list. This is a complication that arises
when computing the interval availability distribution
which is not encountered in (VARI-)METRIC
model. The previous complication makes a detailed
Markov analysis difficult. For this reason, in the
following section we shall propose an approximate
two-dimensional finite-size Markov chain to
represent the state evolution of item j.
The tagged system is operational at time t if
X
j
(t)=1, for all j=1,…,M. Let O(T) denote the total
sojourn time of the joint process (X
1
(t), X
2
(t),…,
X
M
(t)) in state (1,..,1) during [0,T]. The interval
availability of the tagged system can be written as
A(T)=O(T)/T. Note that the processes X
j
(t), for
j=1,…,M, are mutually independent and can be
modeled as a Markov chain. Therefore, the joint
process (X
1
(t),…, X
M
(t)) is also a Markov chain.
A word on notation: Given that A is a matrix,
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
344
A(i,j) denotes the (i,j)-entry of A. We use
⊗
as the
Kronecker product defined as follows. Let A and B
be two matrices then A
⊗
B is a block matrix where
the (i,j)-block is equal to A(i,j)B. We use e to denote
a column vector with all entries equal to one.
4 APPROXIMATION
In this section, we first propose an approximate
two-dimensional continuous-time finite-state
Markov chain to model the evolution of X
j
(t) over
time. Second, we represent the transition generator
of the joint process (X
1
(t),…, X
M
(t)) as function of
the generators of X
j
(t), j=1,…,M. The main
approximations are as follow: the time to satisfy an
item j backorder at the depot is equal to its time to
repair. This means that it is exponential distributed
with rate
. If there is on-hand stock of item j at
depot the time to satisfy a backorder at the base is
equal to the minimum of the item repair time and the
order-and-ship time. Moreover, we shall assume that
all the systems in the installed base, excluding the
tagged system, are always operational.
Let us consider the finite-state two-dimensional
Markov chain
(
)
,
(
)
:≥0, referred to
as
. We note that the chain has a finite state
space because of the finite number of stocks in the
network. Recall that
(
)
is the item j pipeline of
the tagged system i and N
j
(t) is the total number of j-
th items in the depot repair shop. Note that
(
)
∈{0,⋯,
+1} and
() ∈ {0,⋯,
+
+⋯+
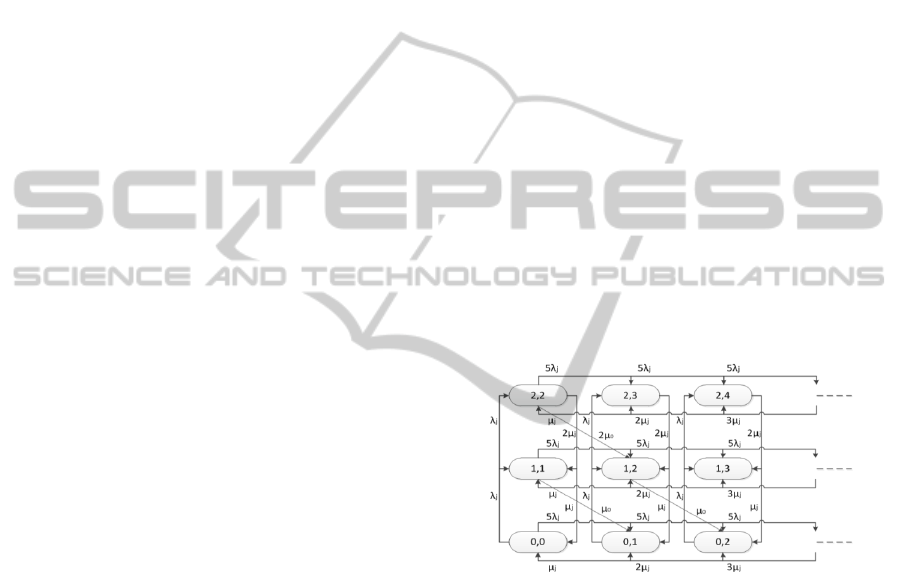
+}. Figure 1 shows the transition
diagram of
with s
0j
=2 and s
ij
=1. The process
has the following transitions:
• A failure of item j in the tagged system. In
Figure 1, it represents the transition from (PL
ij
(t),
N
j
(t)) to (PL
ij
(t)+1, N
j
(t)+1) with rate λ
j
.
• A failure of item j in one of the systems in the
installed based excluding the tagged system. In
Figure
1, it represents the transition from (PL
ij
(t),
N
j
(t)) to (PL
ij
(t), N
j
(t)+1), which occurs by
assumption with rate (N-1)λ
j
.
• A depot repair completion of an item j that is
used to replenish a backorder for one of the
systems in the installed based excluding the
tagged system. In Figure 1, it represents the
transition from (PL
ij
(t), N
j
(t)) to (PL
ij
(t), N
j
(t)-1),
which occurs by assumption with rate (N
j
(t)-
PL
ij
(t))µ
j
.
• A depot repair completion of an item of type j
that is used to replenish a backorder of the
tagged system. In Figure
1, it is the transition
from state (PL
ij
(t), N
j
(t)) to (PL
ij
(t)-1, N
j
(t)-1),
which occurs by assumption with rate PL
ij
(t)µ
j
.
• A backorder replenishment from the stock on-
hand at depot. In Figure
1, it is the transition
from (PL
ij
(t), N
j
(t)) to (PL
ij
(t)-1, N
j
(t)) that is
assumed to be equal to PL
ij
(t)µ
0
. Note there is
stock on-hand at the depot if N
j
(t)≤s
0j
.
We emphasize that the previous four transitions
rate are an approximation. The accuracy of these
approximations shall be validated in Section 5.
Let G
j
denote the transition generator of
.
Since
is a finite state Markov that is aperiodic
and irreducible we deduce that
has a steady
state probability. Let
,
(
)
denote the steady state
probability that
is in state (m,n). We define
the probability distribution row vector π as follows
=
,.
,⋯,
,.
,
,.
=
,
,
,
,⋯,
,
⋯
,
=0,⋯,
+1.
Figure 1: Transition diagram of
with s
0j
=2, s
ij
=1,
and N=6.
In the case where
sojourns in states (m,n)
with m≤s
ij
item j in the tagged system is operational.
This is because, for m≤ s
ij
there is no backorder of
item j of the tagged system in the base. On the other
hand, when m=s
ij
+1 there is one item j backorder in
the base. Therefore, item j in the tagged system is
unavailable for m> s
ij
. Let Ω
denote the state space
of
. We split Ω
into to two disjoint subsets: Ω
subset of operational states, i.e., states (m,n) with m≤
s
ij
, and Ω
subset malfunctioning states, i.e., states
(m,n) with m=s
ij
+1. The steady state probability that
item j is operational in the tagged system gives
=1=
,
(
)
∑
,
INTERVAL AVAILABILITY ANALYSIS OF A TWO-ECHELON, MULTI-ITEM SYSTEM
345

where
is the steady state of the process
(
)
, i.e.,
=
(∞). Throughout this paper, we shall assume
that the
starts in steady state at time 0.
Therefore, for all ∈ [0,] the chain
,
=1,…,, will remain in steady state.
In the following, we shall use the uniformization
method, which is extremely useful for computational
purposes. The uniformization method transforms a
continuous-time Markov chain with non-identical
states leaving rate to an equivalent process in which
the transition are generated by a Poisson process at a
uniform rate (Tijms 2003). Let P
j
denote the
transition probability matrix of the uniformized
process of
. The matrix P
j
reads
=+
,
where I is the identity matrix, and ν is given by:
>max
(,),=1,…,||
||, where ||
|| is
the size of the matrix
. Let P
s
denote the transition
probability matrix of the joint uniformized process
(X
1
(t),…, X
M
(t)). Then, P
s
is equal
⊗…⊗
,
see, (Rausand and Høyland 2004).
4.1 Performance Metric
In this section, we derive in closed form the E[A(T)],
Var[A(T)], and P(A(T)=1). We refer the interested
reader for results to (Al Hanbali and van der Heijden
2011).
Theorem 1: The expected system interval
availability during [0,T] is equal to the steady state
system availability and is given by:
[
(
)]
=
,
(
)
∑
.
Before reporting our result on the variance of A(T),
let us introduce some notation. Let γ
j
denote a row
vector that is defined as
=
,.
,⋯,
,.
,,
where 0 denote a row vector with all entries equal to
0. Let f
j
denote a column vector that is defined as
=
(
,⋯,,
)
.
Theorem 2: The variance of the system interval
availability during [0,T] is given by:
[
(
)
]
=2
(
)
(
+2
)
!
(
−+1
)
+2
[
()
]
+−1
(
)
−
[
(
)
]
.
The process X
j
(t) is equal to one for all t
∈
[0,T]
if the time until absorption of ACM
j
into the subset
Ω
is larger than T, given that ACM
j
starts at time 0
in
. Let θ
j
denote the row vector
,⋯,
.
Let O
j
denote the transient generator of AMC
j
under
the assumption that the states of Ω
are absorbing.
That is, O
j
is the matrix composed of the first
+1×(
+
+⋯+
+) rows and
columns of G
j
. Let
denote the time until
absorption into a state of Ω
. It is then well known
that, see, (Neuts 1981)
≥=
exp
.
Theorem 3: The Probability that A(T)=1is given by:
(
(
)
=1
)
=
∑
(
)
!
,
where
=+
/
, and
>max
(,), =
1,…,||
||
.
Note that the infinite sum in the previous
Theorem 2 and 3 can be truncated with a
predetermined truncation error bounds, see (De
Souza e Silva and Gail 1986; Tijms 2003).
4.2 Approximation of
(
(
)
≥
)
Until now we have computed E[A(T)], Var[A(T)],
and P(A(T)=1). We shall report now how to fit these
metrics in a probability distribution that is a mixture
of probability mass at one and a Beta distribution.
The choice for Beta distribution is made for the main
reason that: the interval availability and a Beta rv
both have finite support. The interval availability has
probability mass at 0 and 1. However, in most
practical cases with high expected interval
availability P(A(T)=0) is almost zero. For that
reason, we shall neglect it in the following. We
approximate the interval availability as follows:
(
)
=(1−
(
(
)
=1
)
∗+
(
(
)
=1
)
,
where B is a Beta distributed rv bounded between 0
and 1. From the latter equation it readily seen that
[
Β
]
=
[
(
)
]
−
(
(
)
=1
)
1−
(
(
)
=1
)
,
[
Β
]
=
[
(
)
]
−
(
(
)
=1
)
1−
(
(
)
=1
)
.
The probability density of a Beta rv reads
(
;,
)
=
1
(,)
(
1−
)
,
where (,) is the Beta function. Given that
expectation and the variance of Β is known a simple
algebra gives that
=
(
1−
[
Β
]
)
∗
[
Β
]
[
Β
]
−
[
Β
]
,and=
1
[
Β
]
−1.
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
346
Finally, we conclude that
(
(
)
≥
)
=(1−
(
(
)
=1
)
(
;,
)
+
(
(
)
=1
)
.
5 NUMERICAL VALIDATION
In this section, we compare the results of our model
with the simulation as function of the average
system availability. Moreover, we consider different
cases with different number of items per system (M).
The main scenario is as follows: One depot that
serves six bases. We note this scenario and its input
parameters value are inspired from a case study done
at Thales Netherlands. A base is a system that is
composed of M=10,30,50 items. All stocks are
available at the depot and there is no possible repair
at the bases. The repair time of item j is
exponentially distributed with rate
=1/MTTR
j
,
where MTTR
j
is the mean time to repair item j. The
order of magnitude of the MTTR
j
is between few
month to more than a year. The order-and-ship time
is exponentially distributed with mean 120 hours. In
the simulation, we shall assume that the order-and-
system time is deterministic. Item j fails according to
a Poisson process with mean time between failures
(
) equal to 1/
,=1,⋯,. The order of
magnitude of
is between few times per year to
few times per hundred years. We are interested in
the interval availability of a system during one year,
i.e., T=8760 hours. The implementation of the
simulation is done in Plant Simulation v8.2. We
used Matlab v7.8 for the approximations. For details
on the stock allocations see the Appendix.
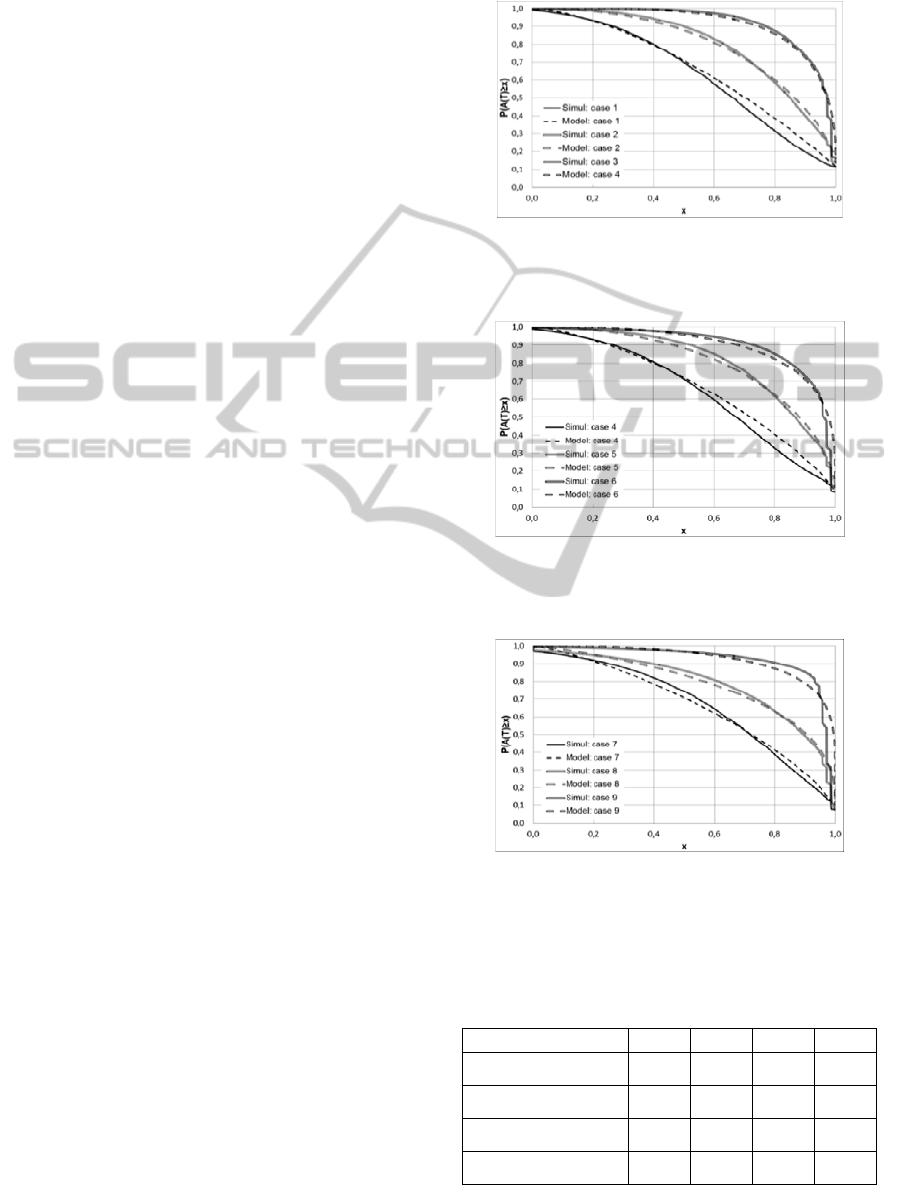
In Figure 3, 4 and 5, we show the survival
function of the interval availability using our model
and the simulation with M=10, 30, 50, respectively.
Note that the discontinuity points in the tail of A(T)
using simulation are due to the deterministic
assumption of the order-and-ship time. Observe that
our model has the highest accuracy for the cases
where M=10 and 30 and where E[A(T)] is larger
than 80%. Our model predicts very well E[A(T)] for
all the cases, see the second row in Table 1, and 2
for details. However, our model predicts Var[A(T)]
with less accuracy. Moreover, it seems that the
accuracy of Var[A(T)] has less impact on the
survival function than the accuracy of E[A(T)], see
for example the results of cases 3, 6, and 9. Note that
for all the different cases considered the difference
of (
(
)
≥), with ≥
[
(
)]
, obtained using
the simulation and our model is larger than -0.04 and
smaller than 0.07, as indicated in Table 1, and 2.
Finally, note that the run time of our approximation
is less 100ms for the considered cases.
Figure 2: Interval availability survival function with M=10
in case: 1. E[A(T)] = 63%, 2. E[A(T)] = 79%, and 3.
E[A(T)] = 92%.
Figure 3: Interval availability survival function with M=30
in case: 4. E[A(T)] = 64%, 5. E[A(T)] = 81%, and 6.
E[A(T)] = 90%.
Figure 4: Interval availability survival function with M=50
in case: 7. E[A(T)] = 66%, 8. E[A(T)] = 79%, and 9.
E[A(T)] = 92%.
Table 1: Relative absolute difference of E[A(T)] (resp.,
Var[A(T)]) obtained using our model and simulation for
case 1,2, 3, and 4.
Case
1 2 3 4
Relative absolute
difference E[A] (%)
3.68 0.17 0.35 3,67
Relative absolute
difference Var[A(T)] (%)
8.08 12.42 20.45 7,39
Min difference of
P(A(T)>x), x<=E[A(T)]
-0.04 -0.01 0 -0,04
Max difference
P(A(T)>x), x<=E[A(T)]
0.01 0.02 0.02 0,01
INTERVAL AVAILABILITY ANALYSIS OF A TWO-ECHELON, MULTI-ITEM SYSTEM
347

Table 2: Relative absolute difference of E[A(T)] (resp.,
Var[A(T)]) obtained using our model and simulation for
case 5, 6, 7,8 and 9.
Case
5 6 7 8 9
Relative absolute
difference E[A] (%)
0,49 0,11 0,34 0,17 0,22
Relative absolute
difference
Var[A(T)] (%)
12,83 7,01 6,77 4,22 1,51
Min difference of
P(A(T)>x),
x<=E[A(T)]
-0,01 -0,01 -0,03 -0,02 -0.01
Max difference
P(A(T)>x),
x<=E[A(T)]
0,03 0,03 0,04 0,03 0.07
6 CONCLUSIONS
In this paper we analyzed the interval availability of
a two-echelon network that supports multi-item
systems. We proposed an analytical approximation
that is based on a Markov chain analysis. We
computed in closed and exact form the expected, the
variance, and the probability of hundred percent
interval availability of the system. Using the
previous metrics we approximate the survival
function of the interval availability. The simulation
result shows that our model has accurate results
especially for high expected interval availability.
ACKNOWLEDGEMENTS
This research is part of ProSeLo project that is
sponsored by Dinalog, The Netherlands.
REFERENCES
AberdeenGroup, Ed. (2005). The Service Parts
Management Solution Selection Report. SPM Strategy
and Technology Selection Handbook, Service Chain
Management.
Alfredsson, P. and J. Verrijdt (1999). "Modeling
emergency supply flexibility in a two-echelon
inventory system." Management Science 45(10):
1416-1431.
Al Hanbali, A. and M. van der Heijden (2011). Interval
availability analysis of a two-echelon, multi-item
system. Beta working paper 359.
Carrasco, J. (2004). "Solving large interval availability
models using a model transformation approach."
Computers & OR 31(6): 807-861.
Deloitte (2006). "The service revolution in global
manufacturing industries."
De Souza e Silva, E. and H. Gail (1986). "Calculating
Cumulative Operational Time Distributions of
Repairable Computer-Systems." IEEE Trans. on
Computers 35(4): 322-332.
Graves, S. C. (1985). "A multi-echelon inventory model
for a repairable item with one-for-one replenishment."
Management Science 31(10): 1247-1256.
Kirmani, E. and C. Hood (2008). A New Approach to
Analysis of Interval Availability. In Proc. of IEEE
ARES, Spain.
Nakagawa, T. and A. L. Goel (1973). "A note on
availability for a finite interval." IEEE Trans. on
Reliability 22:271-272.
Neuts, M. (1981). Matrix-geometric solutions in stochastic
models: an algorithmic approach, Dover Pubns.
Rausand, M. and A. Høyland (2004). System reliability
theory : models, statistical methods, and applications.
Hoboken, NJ, Wiley-Interscience.
Sherbrooke, C. (1968). "METRIC: A multi-echelon
technique for recoverable item control." Operations
Research 16(1): 122-141.
Smith, M. (1997). "An approximation of the interval
availability distribution." Probability in the
Engineering and Informational Sciences 11(4): 451-
467.
Takács, L. (1957). "On certain sojourn time problems in
the theory of stochastic processes." Acta Mathematica
Hungarica 8(1): 169-191.
Tijms, H. (2003). A first course in stochastic models. New
York, Wiley.
van der Heijden, M. (1988). "Interval uneffectiveness
distribution for a k-out-of-n multistate reliability
system with repair." European journal of operational
research 36(1): 66-77.
APPENDIX: SIMULATION
DETAILS
Case 1: M=10, depot stock =(0 0 0 0 0 0 0 0 0
0). Case 2: M=10, depot stock =(1 0 0 0 1 0 0 0 0
0). Case 3: M=10, depot stock =(2 1 1 1 2 1 0 0
0 0). Case 4: M=30, depot stock =(0 1 2 2 0 1 1
1 1 0 1 1 1 1 1 1 1 0 1 0 0 0 0 1 0 0
0 0 0 0). Case 5: M=30, depot stock =(1 1 2 2 1
1 1 1 1 0 1 1 1 1 1 1 1 0 1 0 0 0 0 1
0 0 0 0 0 0). Case 6: M=30, depot stock =(7 1 2
2 2 1 1 1 1 0 1 1 1 1 1 1 1 0 1 0 0 0
0 1 0 0 0 0 0 1). Case 7: M=50, depot stock =(1 0
0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0). Case 8: M=50, depot stock
=(7 1 2 2 2 1 1 1 1 1 1 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0). Case 9: M=50,
depot stock =(7 1 2 2 4 1 1 1 1 1 1 1 1 1
1 1 1 0 1 0 0 0 0 1 0 0 0 0 0 1 1 1 0
0 0 0 0 4 4 4 1 1 1 1 1 1 2 1 1 0).
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
348
