
COMPARING LINEAR AND CONVEX RELAXATIONS FOR
STEREO AND MOTION
Thomas Schoenemann
Lund University, Lund, Sweden
University of Pisa, Pisa, Italia
Keywords:
Motion estimation, Convex relaxation.
Abstract:
We provide an analysis of several linear programming relaxations for the problems of stereo disparity estima-
tion and motion estimation. The problems are cast as integer linear programs and their relaxations are solved
approximately either by block coordinate descent (TRW-S and MPLP) or by smoothing and convex optimiza-
tion techniques. We include a comparison to graph cuts. Indeed, the best energies are obtained by combining
move-based algorithms and relaxation techniques. Our work includes a (slightly novel) tight relaxation for the
typical motion regularity term, where we apply a lifting technique and discuss two ways to solve the arising
task. We also give techniques to derive reliable lower bounds, an issue that is not obvious for primal relaxation
methods, and apply the technique of (Desmet et al., 1992) to a-priori exclude some of the labels. Moreover we
investigate techniques to solve linear and convex programming problems via accelerated first order schemes
which are becoming more and more widespread in computer vision.
1 INTRODUCTION
First order methods for correspondence problems, in
particular stereo and motion, have received a lot of
attention over the past few years. The arising opti-
mization problems are largely solved today, and it is
time to compare the different techniques. In doing
so, we focus on a topic that has been widely ignored
for computer vision: in a primal relaxation scheme,
what can we truly conclude about the associated lower
bound? Most standard approaches require a very high
precision to give a guaranteed lower bound, which is
impractical.
The addressed models are discrete multi-label
problems and can be cast as Markov Random Fields
with binary terms. As unary data terms do not impose
algorithmical challenges we focus on the regularity
terms, considering ones that can be expressed in terms
of absolute differences of indicator functions: linear
potentials and the Potts model.
Subsequently, we consider two types of linear pro-
gramming relaxations: the standard marginal poly-
tope relaxation associated to inference in Markov
Random Fields, and specialized linear relaxations
where absolute differences are modeled by a con-
straint system. For the latter, we consider a simple
variant and a much tighter relaxation based on lifting.
The problem with these relaxations is that they are
convex, but neither strictly convex nor differentiable,
which makes solving them exactly very cost inten-
sive. In this paper we evaluate two common strategies
to deal with this problem: for the marginal polytope
relaxation we use block-coordinate descent methods
(Kolmogorov, 2006; Globerson and Jaakkola, 2007;
Sontag et al., 2010) that may not find the exact relax-
ation value, but usually get very close to it.
For the specialized relaxations we consider
smoothing techniques that approximate the linear re-
laxations via strictly convex and differentiable func-
tions. These functions are convex relaxations of
the original discrete optimization problem. To solve
the smoothed problems, we apply optimization tech-
niques that are becoming increasingly popular in
Computer Vision but have not been applied to the ex-
act considered problems yet. A basic scheme con-
sists of combining accelerated first order schemes
(Nesterov, 2004) with the projection on a product
of simplices (Michelot, 1986), plus a smoothing of
non-smooth functions (Nesterov, 2005). This scheme
has been used in (Lellmann et al., 2009; Goldl
¨
ucke
and Cremers, 2010). In a second scheme, we apply
the well-known augmented Lagrangian method (Bert-
sekas, 1999, chap. 4.2) to the linear programming for-
mulations.
Previously (Szeliski et al., 2008), energy mini-
mization methods have been compared in a discrete
context including stereo, but excluding motion. In
contrast, we focus on correspondence problems and
5
Schoenemann T. (2012).
COMPARING LINEAR AND CONVEX RELAXATIONS FOR STEREO AND MOTION.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 5-14
DOI: 10.5220/0003710400050014
Copyright
c
SciTePress

lifting techniques. We start with a review of common
approaches for stereo and motion. The optimization
techniques underlying the most relevant works will be
reviewed in a later section.
Stereo. To get an overview of methods for
stereo disparity estimation, the taxonomy given in
(Scharstein and Szeliski, 2002) is still a very good
starting point. A quite robust approach that guaran-
tees global optima for certain first-order priors was
given by (Ishikawa, 2003) and later formulated in
(Pock et al., 2008) as a continuous problem. (Bhus-
nurmath and Taylor, 2008) address second order pri-
ors via customized linear programming and a convex-
ification of the data term.
To further improve the robustness of these models,
typically non-convex regularization terms are used,
and the resulting optimization problems become hard.
(Kleinberg and Tardos, 1999) cast the Potts model as
a linear program, and (Zach et al., 2008) solve this
by coordinate descent on a modified functional. The
top-performing methods are currently based on belief
propagation (Klaus et al., 2006; Yang et al., 2009)
or the related tree reweighted message passing (Kol-
mogorov, 2006). (Meltzer et al., 2005) show how
to obtain global optima by running several stages of
these techniques.
Finally there are move-based algorithms like ex-
pansion moves (Boykov et al., 2001). In a less direct
approach, fusion moves have been considered (Wood-
ford et al., 2008).
Motion. We focus on non-parametric methods to
the estimation of optical flow. Traditionally here one
minimizes a flow-field energy with a non-convex data
term and a convex regularizer. This trend was started
by (Horn and Schunck, 1981) and much refined sub-
sequently. In particular, robust data terms and reg-
ularizers based on absolutes have been considered
(Memin and Perez, 1998; Papenberg et al., 2006).
Also, different optimization techniques have been ex-
plored (Papenberg et al., 2006; Bruhn, 2006; Zach
et al., 2007) and second order priors were considered
(Trobin et al., 2008). All of these methods rely on re-
peated convexification of the energy. Some of them
are among the best performing known today.
In a more recent line of work, one instead works
with a discretized set of possible motion vectors.
One way to address the arising discrete optimization
problem is given by move-based algorithms (Boykov
et al., 2001; Glocker et al., 2008). The remaining
techniques can all be viewed as linear or convex pro-
gramming methods. (Shekhovtsov et al., 2008) in-
troduce a clever application of tree reweighted mes-
sage passing (Kolmogorov, 2006), where horizontal
and vertical displacements are separate variables.
(Goldstein et al., 2009) propose a lifting technique
to solve the non-linearized motion problem in terms
of indicator variables for level sets. Below, we give a
different solution with indicator variables for labels -
the advantage being that we only have easy-to-handle
simplex constraints.
Recently (Goldl
¨
ucke and Cremers, 2010) pro-
posed a very memory efficient technique for large
scale non-linearized motion estimation, using a con-
vexification of non-convex terms. However, as we
show later in this work, the optimal energy is always
zero and the corresponding minimizers are meaning-
less. Hence, this method requires a careful initializa-
tion and must not be run until convergence.
2 THE PROBLEMS
In this paper we consider multi-label problems with
unary and binary terms, i.e. of the general form
E(y) =
∑
p∈V
D
p
(y
p
) +
∑
(p,q)∈N
V
p,q
(y
p
,y
q
) (1)
where y : V → {1,...,L}, p,q denote locations de-
fined by a set of points V ⊆ R
2
and N is a neigh-
borhood system, usually the 8-neighborhood in this
work. We require that N is asymmetric, i.e. if (p,q) ∈
N then (q, p) /∈ N . Further, it will be convenient to
abbreviate N (p) = {q |(p,q) ∈ N ∨ (q, p) ∈ N }.
2.1 Stereo
In stereo, one is given two images showing the same
scene and wants to find out where the points in the
first image are to be found in the second image. It is
known that each point can be found along a certain
epipolar line. For simplicity, in this work we assume
that these lines coincide with scan-lines in the image.
Given two images I
1
,I
2
: Ω → R , where Ω ⊂ R
2
,
in a continuous formulation one is then searching for
a disparity map d : Ω → R that describes the displace-
ments. In our first model, the optimal disparity map
is defined as the optimum of
Z
Ω
|I
1
(x,y) − I
2
(x + d(x,y), y)|
p
dxdy
+ λ
Z
Ω
|∇d(x,y)| dxdy ,
where p is some positive power and λ > 0 a weighting
factor. The first term is the data term, and we simply
choose p = 1 in this work. The second term is called a
regularizer, and we will meet one other choice below.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
6

Most current top-performing methods are based
on discretizing the continuous model and, more im-
portantly, the range of the function d. That is, we now
assume that d : V → L, where V is the set of pixel
locations and L ⊂ R is a finite set. For this work we
assume that the points in L are induced by an equidis-
tant spacing.
Instead of integrals, in the data term one is now
considering sums over the pixels in the image. Dis-
cretizing the regularity term is more intricate. We will
consider the approximation
|∇d(p)| ≈
∑
q∈N (p)
|d(p)− d(q)|
kp − qk
.
Methods derived from the continuous model will typ-
ically take a Euclidean vector norm of the gradient
here (Goldstein et al., 2009; Goldl
¨
ucke and Cremers,
2010), known as total variation. By defining
D(p = (x, y), l) = |I
1
(x,y) − I
2
(x + l,y)|
we are finally ready to phrase the first discrete model
considered in this work:
∑
p
D(p,d(p)) + λ
∑
(p,q)∈N
|d(p)− d(q)|
kp − qk
. (SA)
For the second model we directly consider the discrete
formulation which amounts to the Potts model:
∑
p
D(p,d(p)) + λ
∑
(p,q)∈N
1 − δ(d(p),d(q))
kp − qk
, (SP)
where δ(·,·) is the Kronecker delta.
2.2 Motion
Motion is a generalization of stereo to arbitrary two-
dimensional displacements, denoted by two functions
u : Ω → R and v : Ω → R for the displacement in hori-
zontal and vertical direction, respectively. The contin-
uous formulation of the model we will consider looks
as follows:
Z
Ω
|I
1
(x,y) − I
2
(x + u(x,y),y + v(x,y))|dxdy
+ λ
Z
Ω
h
|∇u(x,y)| + |∇v(x,y)|
i
dx dy .
Here, we have convex regularizers but a non-convex
data term which makes the problem difficult. Re-
cently there has been increasing interest (Shekhovtsov
et al., 2008; Goldstein et al., 2009; Goldl
¨
ucke and
Cremers, 2010) in methods that discretize the ranges
of the displacement functions. That is, we are now
considering u : V → L
H
and v : V → L
V
, where L
H
and L
V
are finite subsets of R . The discrete model
looks as follows:
∑
p∈V
|I
1
(x,y) − I
2
(x + u(x,y),y + v(x,y))| (MA)
+λ
∑
(p,q)∈N
|u(p) − u(q)|
kp − qk
+
∑
(p,q)∈N
|v(p) − v(q)|
kp − qk
.
The resulting optimization problem is much harder
than (SA) for stereo. Since with a Potts potential it
would be even more difficult, we will not consider a
variant (MP) here.
2.3 Why Lower Bounds?
Above two essential problems of computer vision
have been cast as energy minimization problems. In
practice it is desirable but not strictly necessary to find
the global minimum of these problems: the functions
are designed in a way that any solution with energy
in a certain band around the optimal one should be an
acceptable solution. Hence, if one is able to provide
a tight lower bound, any method that finds a solution
close to this bound will give valuable insights into the
suitability of the models for relevant real-world in-
stances of the problem.
2.4 Excluding Labels
In the absence of a regularity term (i.e. λ = 0) the
above problems are easy to solve: the optimal label
can be determined independently for each pixel. As
soon as there is a regularity term, even with a very
small λ, this no longer works. However, with the help
of the dead-end elimination algorithm of (Desmet
et al., 1992) it is still possible to at least exclude some
of the labels. We state this (adapted to our context) in
the following proposition:
Proposition 1. Consider the general energy (1) and
assume V
p,q
(·,·) ≥ 0 everywhere. For any site p, pick
a k
p
∈ arg min
l
D
p
(l). Now, if for any label l
D
p
(l) > D
p
(k
p
) +
∑
q:(p,q)∈N
max
l
V
p,q
(k
p
,l) , (2)
then y
p
6= l in any optimal solution y.
Proof: Assume that y
∗
is an optimal solution satis-
fying y
∗
p
= l and denote its energy c
∗
. Now define
ˆ
y
as
ˆy
v
=
k
p
if v = p
y
∗
v
else .
Then the cost of
ˆ
y are
ˆc = c
∗
+ D
p
(k) − D
p
(l) +
∑
q∈N (p)
[V
p,q
(k
p
,y
∗
q
) −V
p,q
(l,y
∗
q
)] .
COMPARING LINEAR AND CONVEX RELAXATIONS FOR STEREO AND MOTION
7

Exploiting the condition (2) on D
p
(l), it follows that
ˆc < c
∗
+
∑
q∈N (p)
[V
p,q
(k
p
,y
∗
q
) − max
l
0
V
p,q
(k
p
,l
0
)
−V
p,q
(l,y
∗
q
)]
≤ c
∗
.
So
ˆ
y has a lower energy than y
∗
. A contradiction.
For (SP) up to 25% of all labels can be excluded,
and we exploit this information to initialize the con-
vex relaxation methods.
3 LINEAR PROGRAMMING
RELAXATIONS
In this paper, we evaluate strategies to solve the
problems (SA),(SP) and (MA) by first casting them
as integer linear programs and then (approximately)
solving the arising linear programming relaxations.
Hence, we are dealing with constrained optimization.
All formulations are based on indicator functions to
express which pixel has which label.
For stereo, all considered methods introduce a bi-
nary variable x
p
d
∈ {0,1} for every p ∈ V and every
label d ∈ L, where a value of 1 indicates that y
p
= d.
The variables are grouped into a vector x
S
. Among
other things, the constraint system expresses that ev-
ery pixel must have exactly one label:
x
S
∈ S
S
=
n
ˆ
x|
∑
d∈L
ˆx
p
d
= 1 ∀p ∈ V
o
.
Together with the constraint x
S
≥ 0 that is naturally
satisfied for binary variables such a constraint system
is known as a product of simplices, an important fact
for several of the methods we consider below.
For motion, there are two different approaches. In
one of them there is a binary variable x
p
h,v
∈ {0,1} for
every pixel p ∈ V and combination of displacements
h ∈ L
H
,v ∈ L
V
. All these variables are grouped into
a vector x
H×V
. The constraint that every pixel have
exactly one label is now expressed as
x
H×V
∈ S
H×V
=
n
ˆ
x|
∑
h,v
ˆx
p
h,v
= 1 ∀p ∈ V
o
.
In the other approach there are separate binary
variables x
p,H
h
and x
p,V
v
for every pixel p ∈ V to ex-
press the horizontal and vertical displacements of a
pixel. They are grouped into a vector x
HkV
. Now ev-
ery pixel must have exactly one horizontal and exactly
one vertical label, expressed as
x
HkV
∈ S
HkV
=
n
ˆ
x|
∑
h
ˆx
p,H
h
=
∑
v
ˆx
p,V
v
=1 ∀p ∈ V
o
.
In both methods we again have products of simplices.
All of these problems are based on binary variables.
However, these often make the arising constrained op-
timization problems very hard. As a consequence,
x ∈ {0,1} is often relaxed to the constraint x ∈ [0,1]
and the resulting problem is in all considered cases a
linear programming relaxation (when using smooth-
ing this turns into a non-linear but still convex prob-
lem).
Before we proceed to present the considered
methods, we note that the data terms of (SA) and
(SP) can now be expressed as a linear function c
S
T
x
S
,
those for motion as a linear function c
H×V
T
x
H×V
,
where
c
p
d
= |I
1
(p) − I
2
(p + (d 0)
T
)|
c
p
h,v
= |I
1
(p) − I
2
(p + (h v)
T
)| .
3.1 Marginal Polytope Formulations
All considered problems are inference problems for
Markov Random Fields with unary and pairwise
terms. There is a standard integer linear programming
formulation (and associated LP-relaxation) for such
problems, called the marginal polytope formulation.
Here we detail it by directly choosing (SA) and
(SP) as applications. Problem (1) is here re-phrased
as the integer linear program
min
z
∑
p
∑
l∈L
D
p
(l) · z
p
l
+
∑
(p,q)∈N
∑
l
p
,l
q
V
p,q
(l
p
,l
q
) · z
p,q
l
p
,l
q
s.t.
∑
l
q
z
p,q
l
p
,l
q
= z
p
l
p
∀p ∈ V ,l
p
∈ L (3)
∑
l
p
z
p,q
l
p
,l
q
= z
q
l
q
∀q ∈ V ,l
q
∈ L
z
p
l
∈ {0, 1} ∀p ∈ V ,l ∈ L .
For general V
p,q
(·,·) this integer programming prob-
lem is NP-hard, so one aims at solving the linear
programming relaxation, i.e. relaxing z
p
l
∈ {0,1} to
z
p
l
∈ [0,1]. However, actually storing all pairwise vari-
ables z
p,q
l
p
,l
q
is only practicable for a very small number
of labels and hence not applicable for stereo. Hence,
using a standard linear programming solver is not an
option here. Instead there are specialized block coor-
dinate descent algorithms which we introduce below.
Many of these methods have already been tested
on the problem of stereo, e.g. (Kolmogorov, 2006).
For motion we note the work of (Shekhovtsov et al.,
2008) who show how to efficiently solve the problem
(MA) with these techniques. They build on variables
x
HkV
, so there are no longer any unary terms: the
data term is now binary, too. This results in savings
in memory and run-time compared to the straightfor-
ward solution with variables x
H×V
.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
8

3.2 Specialized Linear Programming
We now turn to specialized linear programming re-
laxations which take into account that the regularity
terms are functions of absolute differences, i.e. terms
of the form |y
p
− y
q
| where y
p
,y
q
∈ L. At first glance
this does not apply to the Potts model. However, as
exploited by (Kleinberg and Tardos, 1999; Zach et al.,
2008), the Potts model can be written as a sum of ab-
solute differences in terms of the indicator variables:
1 − δ(y
p
,y
q
) =
1
2
∑
l∈L
|x
p
l
− x
q
l
| . (4)
Finally, minimizing terms of the form |y
p
− y
q
| is
equivalent to the linear program (see e.g. (Dantzig and
Thapa, 1997))
min
a
p,q
+
,a
p,q
−
a
p,q
+
+ a
p,q
−
(5)
s.t. y
p
− y
q
= a
p,q
+
− a
p,q
−
,
a
p,q
+
≥ 0, a
p,q
−
≥ 0 .
By itself this problem is trivial and the optimum 0.
However, this construction also holds when integrated
into larger linear programs (as e.g. derived below),
provided the auxiliary variables a
p,q
+
,a
p,q
−
are not used
for other constraints.
While the Potts model (4) can now be directly
translated to a linear program, for (SA) and (MA)
this is more difficult: the models here involve differ-
ences between labels, i.e. in terms of the variables y,
whereas it is often convenient to state the problem in
terms of the binary indicator variables x. Below we
detail two ways on the problem of stereo, then briefly
discuss the transfer to motion estimation.
Simple Relaxations. A simple way, used in (Lell-
mann et al., 2009; Goldl
¨
ucke and Cremers, 2010), to
express the absolute difference |y
p
− y
q
| in terms of
indicator variables is given by
|y
p
− y
q
| =
∑
l∈L
l · (x
p
l
− x
q
l
)
While for binary variables this expression holds ex-
actly, we will see later that the associated relaxations
are quite weak. The linear program corresponding to
(SA) is now
min
x,a
±
c
S
T
x
S
+
∑
p,q∈N
λ
kp − qk
[a
p,q
+
+ a
p,q
−
]
s.t.
∑
l∈L
l · (x
p
l
− x
q
l
) = a
p,q
+
− a
p,q
−
∀(p,q) ∈ N ,
x
S
∈ S
S
,x
S
≥ 0 , a
±
≥ 0 .
Relaxations based on Lifting. A technique that gives
much stronger relaxations is called lifting and was
used by (Ishikawa, 2003) to show that (SA) can be
globally optimized via graph cuts - the linear pro-
gramming relaxation is here equivalent to the integer
linear program. In the considered setting, lifting is
closely related to level sets, i.e. it can be expressed
using variables
u
p
l
=
1 if y
p
≤ l
0 else
=
∑
l
0
≤l
x
p
l
0
.
With these variables we can now express the original
absolute differences as sums of absolute differences
of the level variables:
|y
p
− y
q
| =
∑
l∈L
u
p
l
− u
q
l
,
and obtain the linear program
min
x,a
±
c
S
T
x
S
+
∑
p,q∈N
λ
kp − qk
[a
p,q
+
+ a
p,q
−
]
s.t.
∑
l
0
≤l
[x
p
l
− x
q
l
] = a
p,q
+,l
− a
p,q
−,l
∀(p,q) ∈ N ,l ∈ L,
x
S
∈ S
S
,x
S
≥ 0 , a
±
≥ 0 .
Motion Relaxation. Both introduced techniques
can be transferred to the problem of motion estima-
tion when using the variables x
H×V
. For simplicity
we state the models in terms of absolute differences
and leave the construction
`
a la (5) to the reader. The
simple relaxation can be cast as
min
x
H×V
c
H×V
T
x
H×V
+
∑
(p,q)∈N
λ
kp − qk
∑
h,v
v · [x
p
h,v
− x
q
h,v
]
+
∑
(p,q)∈N
λ
kp − qk
∑
h,v
h · [x
p
h,v
− x
q
h,v
]
s.t. x
H×V
∈ S
H×V
, x
H×V
≥ 0 .
The lifted version is stated here as
min
x
H×V
,u
c
H×V
T
x
H×V
+
∑
(p,q)∈N
λ
kp − qk
∑
h
|u
p,H
h
− u
q,H
h
|
+
∑
(p,q)∈N
λ
kp − qk
∑
v
|u
p,V
v
− u
q,V
v
|
s.t. u
p,H
h
= u
p,H
h−1
+
∑
v
x
p
h,v
u
p,V
v
= u
p,V
v−1
+
∑
h
x
p
h,v
x
H×V
∈ S
H×V
, x
H×V
≥ 0 .
Note that here it is straightforward to eliminate the
variables u as they are defined by acyclic equality
constraints.
COMPARING LINEAR AND CONVEX RELAXATIONS FOR STEREO AND MOTION
9

3.3 Quadratic Programming
Formulations
Recently (Goldl
¨
ucke and Cremers, 2010) proposed
to model problems with product label spaces such
as (MA) as a quadratic integer programming prob-
lem with an indefinite cost function. They build on
the separate variable version x
HkV
and (in the discrete
analogon) express the cost function as
∑
p∈V
∑
h,v
c
p
h,v
· x
p,H
h
· x
p,V
v
.
These are sums of second order non-convex terms and
the authors propose to convexify the problem by re-
placing each term by its lower convex envelope:
∑
p∈V
∑
h,v
c
p
h,v
· max{0,x
p,H
h
+ x
p,V
v
− 1} . (6)
The maximization could again be translated to a linear
programming relaxation. This relaxation would nat-
urally fit into our survey. However, we have already
stated in the introduction that it does not make sense,
and will now substantiate this:
Lemma 1. Suppose |L
H
| ≥ 3 and |L
V
| ≥ 3. Then the
minimal value of (6) s.t. x
HkV
∈ S
HkV
,x
HkV
≥ 0 is 0.
Proof: Consider
x
p,H
h
= 1/|L
H
| ∀p ∈ V , h ∈ L
H
x
p,V
v
= 1/|L
V
| ∀p ∈ V , v ∈ L
V
.
Then x
p,H
h
+ x
p,V
v
≤ 2/3 and hence max{0,x
p,H
h
+
x
p,V
v
− 1} = 0 for all p ∈ V ,h ∈ L
H
,v ∈ L
V
.
The given x
HkV
is identical for all pixels, and since a
typical regularization term for stereo and motion will
be at its minimum for such a configuration, this is
the global minimum even for regularized functionals.
The solution is meaningless: it assigns equal proba-
bility to all possible labelings.
4 ALGORITHMS
There are standard software packages for (nearly) ex-
actly solving linear programming relaxations. How-
ever, in practice they do not scale well: e.g. (Meltzer
et al., 2005) found they could handle images of size
up to 39 × 39 for the marginal polytope relaxation in
stereo with 30 disparities.
For the specialized relaxations the situation is a bit
better: we solved the motion relaxation for a 75 × 75
image with displacements between −8 and 8 in steps
of 1 in both horizontal and vertical directions (= 289
labels) using a standard solver. This required roughly
3 GB and several hours computing time, so in practice
it is still too inefficient.
Instead we consider approximate techniques to
solve the relaxations, either using block coordinate
descent or using smoothing techniques. In practice
these methods get very close to the actual relaxation
value.
4.1 The Marginal Polytope
A number of popular algorithms to (approximately)
solve the marginal polytope relaxations are based on
block coordinate descent on dual problem formula-
tions. Here we explore two of them.
TRW-S. (Wainwright et al., 2005) proposed an ap-
proach where the blocks of the dual take the form
of trees. One then alternates the estimation of min-
marginals in the trees (using the inward-outward al-
gorithm) with reparameterization steps. The origi-
nal formulation was not monotonically improving the
dual bound, but the issue was solved by TRW-S (Kol-
mogorov, 2006). We will later see that in practice this
methods gets very close to the optimum.
The running times per iteration are in general
quadratic in the number of labels. However, for
many kinds of potentials (e.g. Potts and absolute dif-
ferences) there are more efficient ways to perform
inward-outward - see e.g. (Felzenszwalb and Hutten-
locher, 2006).
MPLP. Recently (Globerson and Jaakkola, 2007)
introduced a new message passing algorithm derived
from a non-standard dual of the marginal polytope al-
gorithm. On this formulation they perform block co-
ordinate descent where (for pairwise MRFs) a block
considers all dual variables associated to a particular
edge. See also (Sontag et al., 2010) for a very good
explanation and further background on the method.
The method is very efficient and monotonically in-
creases the dual bound. It allows the same kind of
optimizations as TRW-S.
4.2 Specialized Relaxations
For the specialized relaxations we tried block coordi-
nate descent on the primal relaxation, using standard
LP-solvers. This resulted in heavily suboptimal so-
lutions and the running times were still too high. As
a consequence, for these problems we apply smooth-
ing techniques. Note that the smoothed problems are
themselves valid relaxations of the discrete optimiza-
tion problem: the cost for integral solutions are the
same as in the discrete problem.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
10

Smoothing. (Nesterov, 2005) shows how a large
class of non-differentiable functions can be closely
approximated by differentiable functions with
Lipschitz-continuous gradients. Here, very efficient
numerical schemes can be applied (Nesterov, 2004).
In our context, the employed approximation
|x| ≈
|x| −
ε
2
if |x| ≥ ε
x
2
2ε
else
,
where ε > 0 is a small constant. We scale this func-
tion so that it gives exact values for x = ±1. This ex-
pression is substituted wherever absolutes occur in the
problem formulation. One obtains a convex function
to be optimized over a product of simplices, which is
done by combining (Nesterov, 2004) with the algo-
rithm (Michelot, 1986) to re-project on the simplices.
Augmented Lagrangians Instead of smoothing the
absolutes, one can work directly with the linear pro-
gram and apply the very general augmented La-
grangian method (Bertsekas, 1999, chap. 4.2), which
is applicable to many constrained optimization prob-
lems. Here we consider
min
x
c
T
x
s.t. Ax = b, x ∈ S
where A is a matrix and x,c,b are vectors of suitable
dimensions and S denotes a “simple” set, i.e. the pro-
jection on S can be handled efficiently (in our case
S is a product of simplices for the indicator variables
times simple variable bounds for the auxiliary vari-
ables). The augmented Lagrangian method is based
on minimizing
min
x∈S
c
T
x + ν
T
(Ax − b) + γkAx − bk
2
(7)
Indeed, since Ax − b = 0 for any feasible x, for any
ν ∈ R
n
and any γ > 0 this is a convex relaxation of
the original linear program (the cost for feasible so-
lutions remain unchanged). Moreover, the function
has a Lipschitz-continuous gradient, so the acceler-
ated first order method (Nesterov, 2004) with back-
projection on S can be applied.
In practice one also updates the constant γ and the
multiplier ν. With sufficient inner and outer iterations
this method will eventually find the optimum of the
original problem, but this takes too long for our appli-
cations.
We iterate the following steps: First solve (7) with
moderate precision (we use the same scheme as for
the smoothing of absolutes above). Then use the
found solution to update ν ← ν +γ(Ax
0
−b), increase
γ by 1.25 and proceed. When applying this to the
lifted version of the motion relaxation it proved much
more robust to actually include the level variables.
5 DERIVING BOUNDS
The principle of duality (e.g. (Bertsekas, 1999)) im-
plies that any method that maintains dual feasible so-
lutions will provide a feasible lower bound on the op-
timal objective value in every iteration. Among the
considered methods, only the ones for the marginal
polytope satisfy this property.
The methods for the specialized relaxations all
solve the primal problem and provide a generally
valid lower bound only when the respective problem
is solved with very high precision, which is imprac-
tical. However, a valid lower bound can be derived
from a fundamental property of differentiable convex
functions that simultaneously allows to decide if the
global optimum has been found:
Lemma 2. Consider the problem of computing f
∗
=
min
x∈Q
f (x) where f : R
n
→ R is a convex and dif-
ferentiable function and Q is an arbitrary closed set.
Then for any x
0
∈ R
n
f
∗
≥ f (x
0
) − ∇ f (x
0
)
T
x
0
+ min
x∈Q
∇ f (x
0
)
T
x . (8)
Moreover, if Q is convex then x
0
is a global optimum
if and only if the right-hand-side of (8) is equal to
f (x
0
).
Proof: Since f is convex, its tangent hyperplane at x
0
is a lower bound on the problem (Nesterov, 2004), i.e.
f (x) ≥ f (x
0
) + ∇ f (x
0
)
T
(x − x
0
) . The first statement
follows from taking the minimum on both sides. For
the second part, it is well known that x
0
is a global op-
timum of a differentiable convex optimization prob-
lem if and only if there is no local descent direction,
i.e. x
0
∈ arg min
x∈Q
∇ f (x
0
)
T
(x − x
0
).
For the considered problems the minimization is
over a product of simplices, which is straightforward
to compute.
Obtaining Integral Solutions. To obtain integral
solutions, for the primal methods we assign each pixel
p the label corresponding to the label variable with
maximal value. For the dual methods calculating the
objective (i.e. the lower bound) entails solving mini-
mization problems for the unary and pairwise terms.
For MPLP, we take the minimizers of the unary part
to generate an integral solution. TRW-S comes with
a more refined integer solution generation method: it
proceeds in a fixed order over the pixels, always tak-
ing into account the labels of the already fixed pixels.
6 EXPERIMENTS
For testing the considered methods we focus on two
different aspects. To examine the tightness of the
COMPARING LINEAR AND CONVEX RELAXATIONS FOR STEREO AND MOTION
11

modeled relaxations the methods are run for a large
number of iterations. Then we examine many itera-
tions are needed to get useful integral solutions from
inexactly solved relaxations. We also test combi-
nations of relaxation methods and move-based algo-
rithms: the integral solutions obtained from the for-
mer serve as initializations for the latter. We compare
this strategy to purely move-based algorithms started
from the 0-displacement.
In all experiments we chose an 8−connectivity
and found that double precision is necessary. We use
a 3 GHz Core2 Duo machine with a Tesla 2050 GPU.
For the augmented Lagrangians the sparse matrices
are computed on-the-fly in each iteration. We are
comparing Kolmogorov’s TRW-S code
1
against our
own implementation of MPLP, noting that the latter
is only moderately optimized and really designed for
higher order terms.
Stereo. (SA) is tested on the well-known Venus and
Tsukuba
2
. Here, only negligibly few labels can be
excluded by Prop. 1. Moreover, since the prob-
lem can be solved globally using Ishikawa’s lifting
method (Ishikawa, 2003), our main point here is to
show that the simple relaxation provides a very weak
lower bound: on both tested problems its optimal
value is barely more than half of Ishikawa’s global
optimum. And the obtained thresholded solutions are
very noisy.
Figure 1: Best (SP)-energy disparity maps for the consid-
ered sequences.
For the Potts model (SP) between 10% and 25%
of all label constellations could be excluded a priori,
and exploiting this knowledge reduces the number of
required iterations for the smooth approximations by
a third. An evaluation of all methods is given in table
1. Here, the augmented Lagrangian (AL) method pro-
vides the tightest lower bounds, the smooth approxi-
mations are significantly lower but lead to better inte-
gral solutions. TRW-S is a generally good performing
method. In terms of memory, expansion moves are
lowest (140 MB on Teddy), followed by the convex
1
http://research.microsoft.com/en-
us/downloads/dad6c31e2c04471fb724ded18bf70fe3/
2
http://vision.middlebury.edu/stereo/.
Table 1: Stereo: Comparison of lower bounds and integral
energies for (SP) with λ = 15 on the Tsukuba and Teddy
sequences. TRW-S was run for 1500 iterations where it was
near convergence. MPLP (being slower) was run for 500
iterations, where it was progressing only slowly. “Refined”
denotes a subsequent expansion move process. “low. bd.“
reports lower bounds. Note that TRW-S finds tight lower
bounds much earlier than MPLP.
Tsukuba
method low. bd. integral refined
TRW-S 347222 347274 347234
MPLP 347150 348037 347238
conv (ε = 10
−3
) 346908 347256 347235
conv (ε = 10
−4
) 347193 347251 347236
Lag. 12 × 500 347224 347294 347236
Expansion Move – 347833 347833
Teddy
method low. bd. integral refined
TRW-S 664952 666388 665834
MPLP 664278 669431 665357
conv (ε = 10
−3
) 663073 666472 665153
conv (ε = 10
−4
) 664818 666317 665141
Lag. 12 × 500 664991 666357 665178
Expansion Move – 666631 666631
relaxation (340 MB), TRW-S (560) and our MPLP
(950). With 1.7 GB AL needs too much – all tran-
sitions require explicit storage.
In practice, TRW-S gives comparable integral so-
lutions already after 150 iterations (250 sec.), and al-
ready after 35 it beats the value MPLP finds after 500
iterations. Hence, TRW-S is clearly superior to MPLP
on this problem.
To save running time it is better to choose a large
ε (e.g. 0.01) for the smooth approximations. Then
500 iterations (2200 sec) suffice, and on the GPU this
should be much faster. Our MPLP implementation
has similar running times, but AL cannot compete
with them.
Motion. For motion it is both common and sensi-
ble to pre-smooth the considered images, so we apply
three iterations of binomial smoothing (but see next
section). We consider two sequences, shown in Fig.
2, where the entire image is moving. For the upper
we take displacements in [−8,8] × [−8,8] in steps of
1, for the lower we take a range of [−5,5] ×[−5,5] in
steps of 0.5. Up to 4% of the labels could be excluded
via Proposition 1.
Table 2 shows that the TRW-S method generally
gives the best results. MPLP gets close, but already
after 95 iterations TRW-S achieves the bound MPLP
finds after 500. The two methods need nearly equally
long for an iteration
3
.
3
We use edges of type “general” for TRW-S everywhere.
Memory and run-time can be improved (Shekhovtsov et al.,
2008) by changing some of them to type “Potts”.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
12
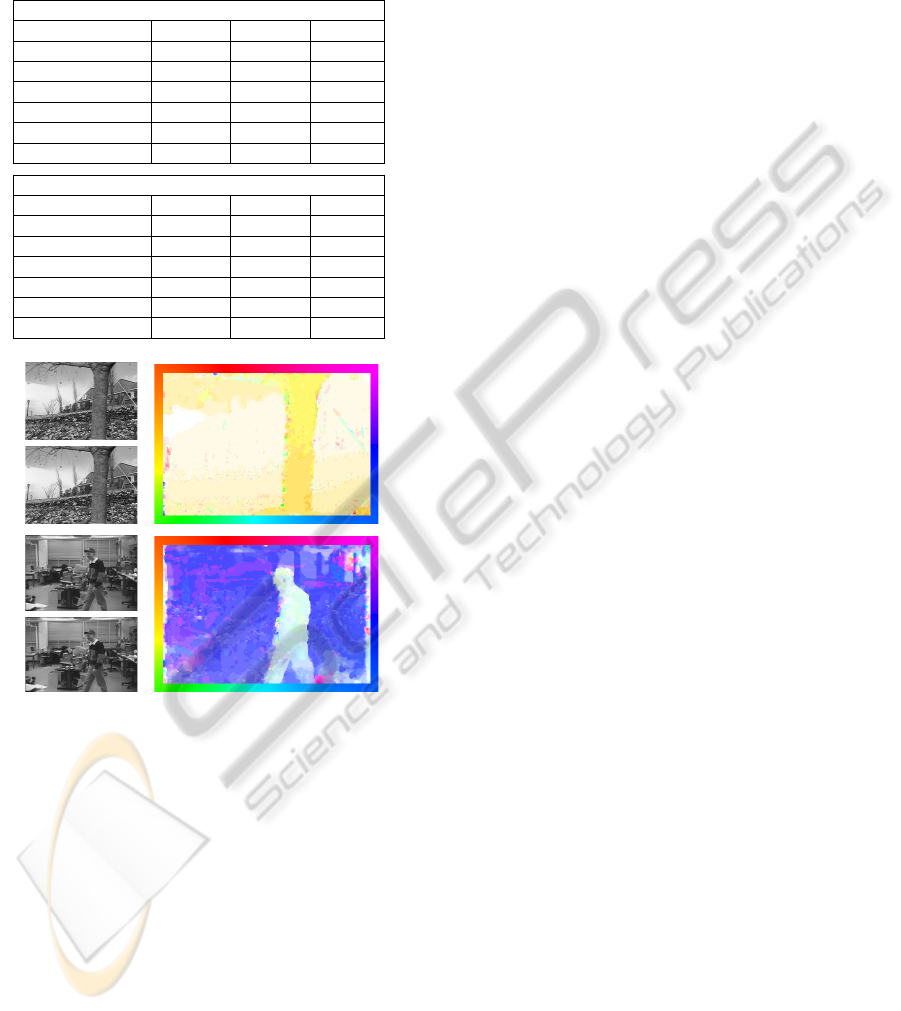
Table 2: Motion: Comparison of lower bounds and integral
energies for (MA) with λ = 1 on the Flower Garden and
Person Walking sequences. TRW-S and MPLP were run for
2500 iterations (close to convergence), with TRW-S using
edges of type “general”. Note that TRW-S finds tight lower
bounds much earlier than MPLP.
Flower Garden
method low. bd. integral refined
TRW-S 134532 135702 134919
MPLP 134385 137171 134896
conv(ε = 10
−2
) 132463 137212 134993
conv(ε = 10
−3
) 134368 136973 134930
aug-lag 12 × 500 134564 137314 134967
Expansion Move – 136180 136180
Person Walking
method low. bd. integral refined
TRW-S 107358 109014 107937
MPLP 107298 110079 107900
conv(ε = 10
−2
) 105538 117761 108115
conv(ε = 10
−3
) 107268 116821 108128
aug-lag 12 × 500 107069 121581 108931
Expansion Move – 111730 111730
Figure 2: Input sequences (www.cs.brown.edu/ black/) and
flow fields (color-coded) corresponding to the best (MA)-
energies.
In one case AL gives the best bound, but this
seems to be an exception (see below). The smooth
approximation needs a small ε to give tight bounds.
However, this method and MPLP need the least mem-
ory of all relaxation-based methods (500 MB com-
pared to 3 GB for TRW-S and 1 GB for AL ) and
is furthermore easily implemented in parallel on the
GPU. Again, expansion moves need much less mem-
ory than all relaxation-based methods: 200 MB.
Concerning the optimization of run-times, again
TRW-S wins: it can be terminated after 10 minutes
(on Flower Garden) and still gives a quite tight lower
bound. For the smooth approximations, we found that
with a choice of ε = 0.01 5000 iterations give compa-
rable integral solutions and still useful lower bounds
and runs in 30 min. on a GPU. AL gave useful results
after 6 × 200 iterations, which took roughly 1 hour.
Weak Data Terms. Finally, we consider problems
with more difficult data terms, where we introduce
noise on the stereo images and no longer pre-smooth
those for motion. For stereo, there are very little
changes. For motion we draw three conclusions:
Firstly, AL now breaks down, requiring many more
iterations to produce competitive bounds. Secondly,
TRW-S is now even more superior to MPLP - it needs
50 iterations to produce the same bound as MPLP
after 500. Thirdly, the lower bounds are now much
looser, up to 12% away from the best known integral
solutions. Moreover, the thresholded solutions abso-
lutely need the refinement process.
7 CONCLUSIONS
We have considered several relaxation-based tech-
niques for the problems of motion and stereo with
discretized displacement sets. In summary, the fastest
and most memory saving methods available are not
relaxation-based at all: the expansion moves win.
However, combining them with convex relaxations
gives better results as well as tight lower bounds.
TRW-S is generally the best relaxation-based
strategy to get good solutions very fast, and is
clearly superior to MPLP. Smooth approximations of-
ten need less memory, are parallelizable and work
about equally good. Augmented Lagrangians need
very much memory and, although they give very tight
bounds in some cases, they do not perform good in
general. To facilitate further research in this area, the
source code associated to this paper will be published.
ACKNOWLEDGEMENTS
We thank Fredrik Kahl for helpful discussions. This
work was funded by the European Research Council
(GlobalVision grant no. 209480).
REFERENCES
Bertsekas, D. (1999). Nonlinear Programming, 2nd edition.
Athena Scientific.
Bhusnurmath, A. and Taylor, C. J. (2008). Solving stereo
matching problems using interior point methods. In
Fourth International Symposium on 3D Data Process-
ing, Visualization and Transmission, 3DPVT.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast ap-
proximate energy minimization via graph cuts. IEEE
COMPARING LINEAR AND CONVEX RELAXATIONS FOR STEREO AND MOTION
13

Transactions on Pattern Analysis and Machine Intel-
ligence (PAMI), 23(11):1222–1239.
Bruhn, A. (2006). Variational optic flow computation: Ac-
curate modelling and efficient numerics. PhD thesis,
Universit
¨
at des Saarlandes, Saarbr
¨
ucken, Germany.
Dantzig, G. and Thapa, M. (1997). Linear Programming 1:
Introduction. Springer Series in Operations Research.
Springer.
Desmet, J., Maeyer, M. D., Hazes, B., and Lasters, I.
(1992). The dead-end elimination theorem and its use
in protein side-chain positioning. Nature, 356:539–
542.
Felzenszwalb, P. and Huttenlocher, D. (2006). Efficient be-
lief propagation for early vision. International Jour-
nal on Computer Vision (IJCV), 70(1).
Globerson, A. and Jaakkola, T. (2007). Fixing max-product:
Convergent message passing algorithms for MAP re-
laxations. In Conference on Neural Information Pro-
cessing Systems (NIPS), Vancouver, Canada.
Glocker, B., Komodakis, N., Tziritas, G., Navab, N., and
Paragios, N. (2008). Dense image registration through
MRFs and efficient linear programming. Medical Im-
age Analysis, 12:731–741.
Goldl
¨
ucke, B. and Cremers, D. (2010). Convex relaxation
for multilabel problems with product label spaces. In
European Conference on Computer Vision (ECCV),
Iraklion, Greece.
Goldstein, T., Bresson, X., and Osher, S. (2009). Global
minimization of Markov random fields with applica-
tions to optical flow. Technical Report 09-77, UCLA
CAM report.
Horn, B. and Schunck, B. (1981). Determining optical flow.
Artificial Intelligence, 17:185–203.
Ishikawa, H. (2003). Exact optimization for Markov Ran-
dom Fields with convex priors. IEEE Transactions
on Pattern Analysis and Machine Intelligence (PAMI),
25(10):1333–1336.
Klaus, A., Sormann, M., and Karner, K. (2006). Segment-
based stereo matching using adaptive cost aggregation
and dynamic programming. In International Con-
ference on Pattern Recognition (ICPR), Hong Kong,
China.
Kleinberg, J. and Tardos, E. (1999). Approximation al-
gorithms for classification problems with pairwise
relationships: metric labeling and Markov Random
Fields. In Symposium on Foundations of Computer
Science.
Kolmogorov, V. (2006). Convergent tree-reweighted mes-
sage passing for energy minimization. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence
(PAMI), 28(10):1568–1583.
Lellmann, J., Becker, F., and Schn
¨
orr, C. (2009). Con-
vex optimization for multi-class image labeling by
simplex-constrained total variation. In IEEE Interna-
tional Conference on Computer Vision (ICCV), Kyoto,
Japan.
Meltzer, T., Yanover, C., and Weiss, Y. (2005). Globally
optimal solutions for energy minimization in stereo
vision using reweighted belief propagation. In IEEE
International Conference on Computer Vision (ICCV),
Beijing, China.
Memin, E. and Perez, P. (1998). Dense estimation and
object-based segmentation of the optical flow with ro-
bust techniques. IEEE Transactions on Image Pro-
cessing (TIP), 7(5):703–719.
Michelot, C. (1986). A finite algorithm for finding the
projection of a point onto the canonical simplex of
n
. Journal on Optimization Theory and Applica-
tions, 50(1).
Nesterov, Y. (2004). Introductory lectures on convex op-
timization. Applied Optimization. Kluwer Academic
Publishers.
Nesterov, Y. (2005). Smooth minimization of non-smooth
functions. Mathematical Programming, 103(1):127–
152.
Papenberg, N., Bruhn, A., Brox, T., Didas, S., and Weick-
ert, J. (2006). Highly accurate optic flow computa-
tion with theoretically justified warping. International
Journal on Computer Vision (IJCV), 67(2):141–158.
Pock, T., Schoenemann, T., Cremers, D., and Bischof, H.
(2008). A convex formulation for continuous multi-
label problems. In European Conference on Computer
Vision (ECCV), Marseille, France.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International Journal on Computer Vision
(IJCV), 47(1–3):7–42.
Shekhovtsov, A., Kovtun, I., and Hlav
´
a
˘
c, V. (2008). Ef-
ficient MRF deformation model for non-rigid image
matching. Computer Vision and Image Understand-
ing, 112(1):91–99.
Sontag, D., Globerson, A., and Jaakkola, T. (2010). Intro-
duction to dual decomposition for inference. In Opti-
mization for Machine Learning. MIT Press.
Szeliski, R., Zabih, R., Scharstein, D., Veksler, O., Kol-
mogorov, V., Agarwala, A., Tappen, M., and Rother,
C. (2008). A comparative study of energy min-
imization methods for Markov random fields with
smoothness-based priors. IEEE Transactions on
Pattern Analysis and Machine Intelligence (PAMI),
30(6):1068–1080.
Trobin, W., Pock, T., Cremers, D., and Bischof, H. (2008).
An unbiased second-order prior for high-accuracy
motion estimation. In Pattern Recognition (Proc.
DAGM), Munich, Germany.
Wainwright, M., Jaakkola, T., and Willsky, A. (2005). MAP
estimation via agreement on (hyper-)trees: Message-
passing and linear programming approaches. IEEE
Tansactions on Information Theory, 51(11):3697–
3717.
Woodford, O., Torr, P., Reid, I., and Fitzgibbon, A.
(2008). Global stereo reconstruction under second
order smoothness priors. In IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), Anchorage, Alaska.
Yang, Q., Wang, L., Yang, R., Stew
´
enius, H., and Nist
´
er,
D. (2009). Stereo matching with color-weighted cor-
relation, hierarchical belief propagation and occlusion
handling. IEEE Transactions on Pattern Analysis and
Machine Intelligence (PAMI), 31(3):492–504.
Zach, C., Gallup, D., Frahm, J.-M., and Niethammer, M.
(2008). Fast global labeling for real-time stereo us-
ing multiple plane sweeps. In Vision, Modeling and
Visualization Workshop (VMV), Konstanz, Germany.
Zach, C., Pock, T., and Bischof, H. (2007). A duality based
approach for realtime TV-L1 optical flow. In Pattern
Recognition (Proc. DAGM), Heidelberg, Germany.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
14
