
SEMI-LOCAL FEATURES FOR THE CLASSIFICATION OF
SEGMENTED OBJECTS
Robert Sorschag
Institute of Software Technology and Interactive Systems, Vienna University of Technology
Favoritenstrasse 9-11, A-1040 Vienna, Austria
Keywords: Visual Features, Segmentation, Object Detection.
Abstract: Image features are usually extracted globally from whole images or locally from regions-of-interest. We
propose different approaches to extract semi-local features from segmented objects in the context of object
detection. The focus lies on the transformation of arbitrarily shaped object segments to image regions that
are suitable for the extraction of features like SIFT, Gabor wavelets, and MPEG-7 color features. In this
region transformation step, decisions arise about the used region boundary size and about modifications of
the object and its background. Amongst others, we compare uniformly colored, blurred and randomly
sampled backgrounds versus simple bounding boxes without object-background modifications. An
extensive evaluation on the Pascal VOC 2010 segmentation dataset indicates that semi-local features are
suitable for this task and that a significant difference exists between different feature extraction methods.
1 INTRODUCTION
The main research question of this work is: How to
extract state-of-the-art texture and color features best
from segmented objects to classify them? This
question is relevant because a set of object detection
approaches have been proposed where segmentation
is used as a pre-processing step (Pantofaru et al.,
2008), (Li et al, 2007), (Rabinovich et al., 2007),
(Russel et al., 2006). They outperform sliding
window approaches although almost the same
features and classification techniques are used. We
believe that customized features that are less
distracted by the object’s background can further
improve these results. The features proposed in this
work exploit this benefit. Furthermore, they are
simple and fast to compute which makes them
suitable to assist segmentation-based object
detection systems.
Generally, the detection of class-level objects in
real-world images is a challenging task for
automated systems that is far from solved. Objects
can be situated everywhere and at every size in an
image. They can be occluded and shown under all
kinds of perspective distortions or under different
lighting conditions. Moreover, intra class differences
and inter class similarities can complicate this task.
Even humans sometimes fail to distinguish between
closely related classes like bicycles and motorbikes
when only a single image with difficult examples is
shown. However, the complexity of object detection
can be reduced when a set of segmented object
hypotheses are given in the first place (Li et al.,
2007) because it is accurately known where to
search for an object.
In this work, we extract well-established image
features semi-locally from segmented objects.
Thereby, color and texture features are generated
from image regions that contain the entire object.
We use the term semi-local features because these
features are locally extracted from the image but
globally extracted from
the object. Furthermore, we
show that the use of differently prepared image
regions
facilitates the power of these features. For
Figure 1: Semi-local features.
instance, the object background is excluded and
170
Sorschag R. (2012).
SEMI-LOCAL FEATURES FOR THE CLASSIFICATION OF SEGMENTED OBJECTS.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 170-175
DOI: 10.5220/0003712301700175
Copyright
c
SciTePress

replaced by white pixels in Figure 1.
This work contributes to object detection research
with an extensive study on the suitability of semi-
local features for the classification of segmented
objects and the influence of different region
preparation techniques. The used set of image
features and dissimilarity measures should ensure
that the evaluation results are as universally valid as
possible. We do not propose a complete object
detection system with object segmentation and
classification techniques. Instead we work on
interactively generated segmentations that are
provided by the Pascal VOC challenge (Everingham
et al., 2010) and use a simple nearest neighbor
classification. In addition to this perfect
segmentation, we simulate inaccurate segmentations
for comparison.
The remainder of the paper is organized as
follows. Section 2 describes related work in the field
of object detection and segmentation. Section 3
presents semi-local features. Section 4 explains the
experiments and Section 5 draws conclusions.
2 RELATED WORK
Local features (Mikolajczyk and Schmid, 2005a) are
a part of the best practice for object detection
systems. First, these features are regularly sampled
or extracted around interest-regions (Mikolajczyk et
al., 2005b) before they are generalized to one or
more bag-of-features (BoF) per image (Van de
Sande et al., 2010), (Lazebnik et al., 2006). This
BoF approach produces fixed-length vectors for
classification. In order to locate objects within an
image, many sub-regions are then investigated with
a sliding window (Lampert et al., 2008). In addition
to BoFs, global and semi-local features have been
successfully used for related tasks, like scene
classification (Oliva and Torralba, 2006), geometric
context retrieval (Hoiem et al., 2005), and human
body detection (Dalal and Triggs, 2005).
2.1 Segmentation-based Detection
Object detection approaches that operate on
segmented objects (Pantofaru et al., 2008), (Li et al.,
2007), (Rabinovich et al., 2007), (Russel et al.,
2006) work similar to sliding window approaches
but with a heavily reduced search-space. Thus, more
powerful (and computationally more expensive)
recognition approaches can be applied. However,
this benefit is not extensively exploited so far: In
Pantofaru et al. (2008) color histograms and RCF
(regionSIFT) descriptors are extracted from the
segmented objects. Li et al. (2007), Rabinovich et al.
(2007), and Leibe et al. (2008) generate BoFs from
SIFT (Lowe, 2004), colorSIFT (Van de Sande et al.,
2010), local shape context (Leibe et al., 2008), and
gray-value patches. In Li et al. (2007) independent
BoFs are extracted from the segmented object and
its background within a bounding box as well as
semi-local HoG features (Dalal and Triggs, 2005).
Rabinovich et al. (2007) sets all background pixels
to black and extracts local features from interest-
regions that overlap with the segmented object. We
use a similar zero-masking step to generate features
with a higher weighting of the object shape.
Only Toshev et al. (2010) propose segmentation
specific features, called boundary object shape,
where the geometric relations of object boundary
edges are measured. We further explore this idea and
propose customized features for the classification of
segmented objects. To the knowledge of the authors,
no work has been proposed so far that investigates
such semi-local features for object detection.
2.2 Segmentation Approaches
Different object segmentation approaches including
Normalized Cuts (Shi and Malik, 1997), MinCuts
(Carreira and Sminchisescu, 2010), and Mean-Shift
(Comaniciu and Meer, 2002) have been used for the
object detection systems described above. A good
overview of segmentation approaches can be found
in Hoeim et al. (2011). In contrast to semantic
segmentation (Csurka and Perronnin, 2010), these
approaches work without knowledge about the
segmented objects and they are used to generate a
‘soup’ of many overlapping segmentations. Such
multi-segmentation approaches can achieve higher
object detection rates when overlapping segments
are individually classified and combined afterwards
(Li et al., 2007). All of the described object
detection systems work with unsupervised
segmentation. However, it can be useful to test
single stages of such detection systems on
interactively generated object segments that are
almost perfect (Pantofaru et al., 2008). We use this
strategy to compare different semi-local features that
are extracted from perfectly and inaccurately
segmented objects.
3 SEMI-LOCAL FEATURES
We extract and classify semi-local features from
segmented objects in following steps. First, a set of
SEMI-LOCAL FEATURES FOR THE CLASSIFICATION OF SEGMENTED OBJECTS
171

transformed image regions are prepared from every
segmented object. Next, different color and texture
features are extracted from these regions and stored
in a database. The features of each object are then
matched against the features of all other objects
using a nearest neighbor strategy with several
dissimilarity measures. At last, we evaluate the
percentage of correctly matched features for each
object class.
3.1 Region Preparation
In this work, semi-local features are extracted from
regions around segmented objects using different
object-background modifications, segment-ation
accuracies and bounding boxes. In the following,
these region preparation methods are explained and
their effects on the resulting feature properties are
discussed.
Figure 2: Region preparation techniques.
Object-background modifications: We use six
different modification techniques, shown in the
columns of Figure 2. Region 1 (leftmost column) is
equivalent to bounding boxes without segmentation.
No focus is set to specific properties of the object in
these regions. In the opposite, shape is the only
attribute left to describe in Region 6 (rightmost
column). In Region 2 and Region 3 black and white
backgrounds are used. These regions set the focus to
the object shape and its content. Region 4 keeps the
characteristics of the original background although
the object is focused and the object boundaries are
sharpened. We use Gaussian smoothing to blur the
background of these regions heavily. The Gaussian
noise of Region 5 also sets focus to the object but
with fewer weighting of the object shape. In
preliminary experiments, we have tested further
object-background modifications (e.g. object bound
expansion) but the six selected ones performed best.
Segmentation accuracy: As shown in Figure 2,
we use two different segmentation accuracies. On
the one hand, perfect segmentations are given from
the Pascal VOC dataset (Everingham et al., 2010).
The object pixels are thereby used as foreground and
all others are used as background. On the other hand,
we simulate an inaccurate segmentation using the
convex hull of all pixels that belong to a perfectly
segmented object. No holes are given in this
approach but the actual object shape is heavily
changed.
Bounding boxes: Most image features are
extracted from square image regions. However,
segmented objects are given as arbitrarily shaped
polygons or image masks, and thus we operate on
bounding boxes around such object segments. As
shown in Figure 3, we select two different bounding
boxes for each object. First, we use tight, rectangular
bounding boxes that touch the segment bounds on
all four sides. These regions are resized to squares in
a pre-processing step. Secondly, we use squared
bounding boxes that touch the object bounds only in
the larger dimension. These regions contain larger
parts of the object’s background but no additional
resize step changes the aspect ratio of these regions.
Figure 3: Bounding boxes.
3.2 Image Features
In this work, four state-of-the-art texture and color
features are used: SIFT, Gabor wavelets, MPEG-7
ColorLayout and ScalableColor. We omit to add
specific shape features because the used texture
features extracted from Region 6 (white object on
black background) already present effective shape
features. All features are computed on 64 x 64 pixel
regions.
SIFT features (Lowe, 2004) consist of 8-
dimensional orientation histograms that are
computed from the image gradients in 16 slightly
overlapping sub-regions on a 4x4 grid. The feature is
normalized to increase the robustness against color
and illumination changes. In the proposed semi-local
feature approach, we extract only one SIFT feature
from the entire object region. No interest point
detection is used in this process.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
172

Gabor wavelets (Frigo and Johnson, 2005) are
computed with a bank of orientation and scale
sensitive Gabor filters. The mean and standard
deviation of each filter output is thereby used as
features values.
MPEG-7 ColorLayout features (Manjunath et
al., 2001) present the spatial distribution of colors in
a very compact form. They cluster an image or
image region into sub-regions of 8x8 pixels and
compute the average pixel value for each of them.
Finally, the first low frequency coefficients of a
discrete cosine transform are selected.
MPEG-7 ScalableColor features (Manjunath et
al., 2001) are computed from a quantized HSV color
histogram. A scalable binary representation is then
generated by indexing the probability values of each
histogram bin before a discrete Haar transformation
is applied. The resulting feature is scale invariant.
3.3 Classification
We compute the nearest neighbor for segmented
objects using all described region preparation
techniques and feature types independently.
Thereby, each segmented query object is matched
against all segmented objects in the dataset that do
not stem from the same image as the query object.
The object class of the nearest neighbor is then used
to classify a query object. We perform this nearest
neighbor classification with following dissimilarity
measures to get as general findings as possible.
Minkowski family distances: L1, Euclidian, and
Fractional distance
Cosine function based dissimilarity
Canberra metric
Jeffrey divergence
Chi-Square statistics
These measures have been chosen according to
their high performance for image retrieval with
global features in Liu et al. (2008) where further
information about these measures can be found. We
believe that more sophisticated classification
approaches can be used to achieve better results, but
it is out of the scope of this work to identify the best
classification strategies. Instead, we try to perform a
fair comparison between the proposed feature
extraction techniques.
4 EVALUATION
In the experiments of this work, we used two
different evaluation strategies. On the one hand, the
recall of correctly classified objects is computed for
each object class and for all classes combined. On
the other hand, we perform an additional k-nearest
neighbor classification to evaluate the percentage of
query objects with at least one correct match in the
top k entries (k = 1-10).
4.1 Dataset
We used the open Pascal VOC 2010 segmentation
dataset (Everingham et al., 2010) for experiments. In
this dataset, 20 different object classes (see x-axis of
Figure 4) are perfectly segmented in 1928 Flickr
images. The ground-truth contains a total number of
4203 objects whereby several object classes occur
more often than other ones. For instance, 928
persons and 108 dinning tables are given. All images
are provided with jpg encoding and a longer
dimension side of 500 pixels.
4.2 Results
The results are organized according to following
aspects: the suitability of semi-local features to
classify segmented objects and the role of region
preparation, segmentation accuracy, used image
feature types, and dissimilarity measures. Figure 4
and Table 1 are used to illuminate these points. Both
show the achieved recall of nearest neighbor
classification for Jeffrey divergence on squared
bounding boxes.
Semi-local features: Figure 4 shows that the
classification rates of the best matching object
classes are significantly above 50% for texture
features. Furthermore, the results of all objects are
clearly above random classification (5%)
independent of the used feature type. The fact that
all 4-legged animals (sheep, horse, cow, cat, dog)
are below the average, indicates that inter class
similarities decrease their classification. As shown in
Table 1, the highest overall classification rate of
46,5% was achieved with SIFT features from
perfectly segmented Region 6. Moreover, 80% of all
objects have at least one correct match within the
first 10 retrieved objects for the same configuration.
These results clearly indicate that semi-local features
are able to facilitate the classification of accurately
segmented objects.
SEMI-LOCAL FEATURES FOR THE CLASSIFICATION OF SEGMENTED OBJECTS
173
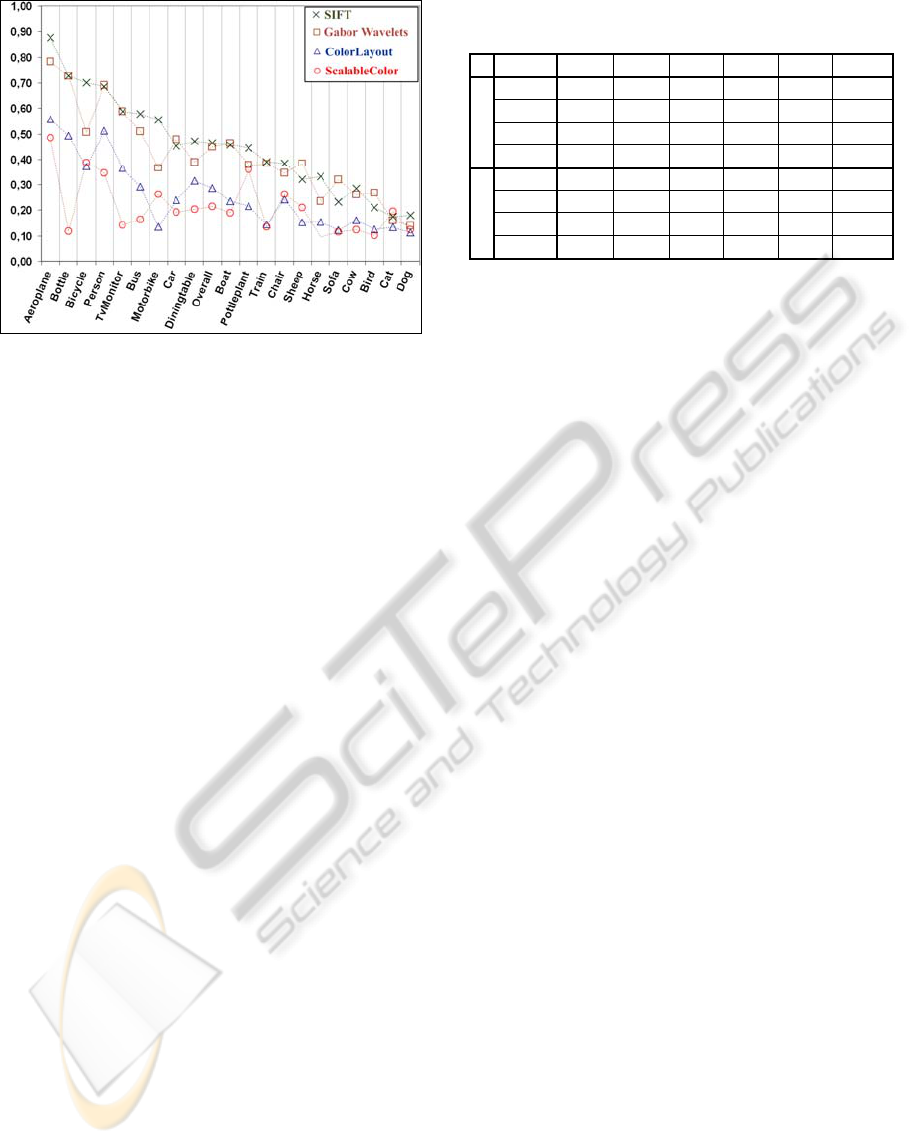
Figure 4: Classification results per object class for perfect
segmentations and square bounding boxes. For each
feature type we give the recall of the best performing
region.
Region preparation: Table 1 shows that texture
features achieved the best results on Region 6 (white
foreground on black background) where only shape
information is given. This is also true for most
object classes. MPEG-7 color descriptors generally
perform best with original objects on uniformly
colored background (Regions 2 and 3). These
regions are also the best choice for texture features
when no accurate segmentation is given. At the first
glance, white background outperforms black
background on the given dataset but the results of k-
nearest neighbour matching did not verify this
assumption. Moreover, square bounding boxes
always achieved better results than rectangle
bounding boxes for SIFT and MPEG-7 features by
an average increase of 2%. This indicates that the
effect of changing the object’s aspect ratio is worse
than using a larger amount of background. However,
for Gabor wavelets no significant changes have been
measured between square bounding boxes and
rectangle ones.
Segmentation accuracy: In order to simulate
inaccurate segmentations from the given test set, we
used the convex hull around perfectly segmented
objects. Table 1 shows the classification results of
perfectly and inaccurately segmented objects. These
results indicate that accurate segmentation can
improve the classification significantly (up to
+24,5%) when the region is prepared appropriately.
In contrast, only smaller improvements of about 2%
are achieved between unmodified regions (Region 1)
and modified ones for inaccurate segmentation. Only
the results of Gabor wavelets improved from 20,5%
to
25.3% and 24.8% for uniformly colored back-
grounds. Region 6 performs worse than all other
Table 1: Overall results (recall) for square bounding
boxes.
R.1 R.2 R.3 R.
4
R.5 R.6
Perfect Seg
SIFT 25,0 38,3 40,4 32,0 29,8 46,5
GW 20,5 37,2 39,9 21,0 31,5 45,0
CL 15,4 22,4 23,6 19,6 15,0 28,7
SC 16,4 21,8 21,4 21,6 16,5 -
Inacc. Seg.
SIFT 25,0 27,2 27,5 22,5 27,2 12,1
GW 20,5 25,3 24,8 19,1 25,1 10,8
CL 15,4 16,8 18,6 17,9 15,2 15,1
SC 16,4 16,5 16,8 16,5 15,8 -
regions for inaccurate segmentation because these
regions only contain very rough object contours, as
shown in Figure 2.
Feature types: The performance of SIFT and
Gabor wavelets is similar for both segmentation
accuracies and all regions except Region 1 and
Region 4 where the background is left unmodified
and blurred, respectively. Gabor wavelets perform
slightly better on rectangular bounding boxes while
SIFT achieves better results on square regions.
MPEG-7 ColorLayout and ScalableColor features
perform worse than texture features for the given
task. Although Figure 4 indicates that ColorLayout
outperforms ScalableColor this is only true because
the best performing region preparation approach
(Region 6) is not applicable for pure color features,
like ScalableColor, where no spatial information is
used.
Dissimilarity measures: The difference bet-
ween the best and the worst dissimilarity measure
for all features is about 3-5%. For instance, the
results of SIFT features for Region 6 on perfect
segmentations lie between 46,5% for the best
(Jeffrey divergence) and 42,4% for the worst mea-
sure (Canberra metric). The highest variations are
caused by MPEG-7 ScalableColor features. It seems
that the ranking of dissimilarity measures does not
depend on the used region preparation technique
because the results of all measures are similarly
ordered for all techniques. The best dissimilarity
measure for all features was Jeffrey divergence
followed by Chi-Squared statistics. The worst
measure was Fractional distance for all features
followed by Canberra metric for texture features. L1
metric performed best of the Minkowski family
measures, especially for texture features where the
difference to Euclidian distance was above 2,5%.
5 CONCLUSIONS
We have proposed semi-local features for the
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
174

classification of segmented but unknown objects. In
this approach, state-of-the-art texture and color
features are extracted from regions that cover the
entire object with and without background-
modifications. Results of an extensive evaluation
indicate that the proposed approach offers the
opportunity to improve the task of object class
detection in combination with efficient segmentation
approaches. The experiments of this work
investigated perfect segmentations as well as
inaccurate ones. The classification was done with a
nearest neighbor matching strategy and different
dissimilarity measures to keep the evaluation as
simple and universally valid as possible.
In the evaluation, we have first shown that it
does matter how the regions of segmented objects
are prepared for semi-local feature extraction.
Regions where the object and its background are
modified can improve the overall classification rate
significantly compared to unmodified regions,
especially for accurate segmentations. Secondly,
square bounding boxes achieves better results than
tight, rectangular bounding boxes. Thirdly, texture
features perform better than color features and
improvements of a few percent can be achieved
when the right dissimilarity measures are chosen.
The Jeffrey divergence and Chi-Square correlation
performed best for all feature types and region
preparation techniques. We conclude that semi-local
features are good candidates to improve object
detection systems due to their simplicity and the
promising results in this work. Furthermore, we plan
to investigate semi-local features in an integrated
object detection system to verify this assumption.
ACKNOWLEDGEMENTS
The author would like to thank Horst Eidenberger
for his feedback and support. The research leading to
this publication has received funding from the
Austrian FIT-IT project ‘IV-ART – Intelligent
Video Annotation and Retrieval Techniques’.
REFERENCES
Carreira, J., Sminchisescu, C., 2010. Constrained
parametric min cuts for automatic object
segmentation. CVPR.
Comaniciu, D., Meer, P., 2002. Mean shift: A robust
approach toward feature space analysis. PAMI.
Csurka, G., Perronnin, F., 2010. An efficient approach to
semantic segmentation. IJCV.
Dalal, N., Triggs, B., 2005. Histograms of oriented
gradients for human detection. CVPR.
Everingham, M., Van Gool, L., Williams, C., Winn, J.,
Zisserman, A., 2010. The PASCAL Visual Object
Classes (VOC) challenge. IJCV.
Frigo, M., Johnson, S., 2005. The design and implement-
tation of FFTW3. Proc. Program Generation, Optimi-
zation, and Platform Adaptation
Hoiem, D., Efros, A., Hebert, M., 2005. Geometric
context from a single image. ICCV.
Hoiem, D., Stein, A., Efros, A., Hebert, M., 2011.
Recovering occlusion boundaries. IJCV.
Lampert, C., Blaschko, M., Hofmann, T., 2008. Beyond
sliding windows: Object localization by efficient
subwindow search. CVPR.
Lazebnik, S., Schmid, C., Ponce, J., 2006. Beyond bags of
features: Spatial pyramid matching for recognizing
natural scene categories. CVPR.
Leibe, B., Leonardis, A., Schiele, B., 2008. Robust object
detection with interleaved categorization and
segmentation. IJCV.
Li, F., Carreira, J., Sminchisescu, C., 2007. Object
recognition as ranking holistic figure-ground
hypotheses. CVPR.
Liu, H., Song, D., Rüger, S., Hu, S., Uren, V., 2008.
Comparing dissimilarity measures for content-based
image retrieval. AIRS.
Lowe, D., 2004. Distinctive image features from scale-
invariant keypoints. IJCV.
Manjunath, B., Ohm, J.-R., Vasudevan, V., Yamada, A.,
2001. Color and texture descriptors. Trans. on Circuits
and Systems for Video Technology.
Mikolajczyk K., Schmid, C., 2005a. A performance
evaluation of local descriptors. Trans. PAMI.
Mikolajczyk, K., Tuytelaars, T., Schmid, C., Zisserman,
A., Matas, J., Schaffalitzky, F., Kadir, T., Van Gool,
L., 2005b. A comparison of affine region detectors.
IJCV.
Oliva, A., Torralba, A., 2006. Building the GIST of a
Scene: The Role of Global Image Features in
Recognition, Visual Perception, Progress in Brain
Research.
Pantofaru, C., Schmid C., Hebert, M., 2008. Object reco-
gnition by integrating multiple image segmentations.
ECCV
.
Rabinovich A., Vedaldi, A., Belongie, S., 2007. Does ima-
ge segmentation improve object categorization? Tech.
Rep. CS2007-090.
Russell, B., Freeman, W., Efros, A., Sivic, J., Zisserman,
A., 2006. Using multiple segmentations to discover
objects and their extent in image collections. CVPR.
Shi, J., Malik, J., 1997. Normalized cuts and image
segmentation. CVPR.
Toshev, A., Taskar, B., Daniilidis, K, 2010. Object
detection via boundary structure segmentation. CVPR.
Van de Sande, K., Gevers, T., Snoek, C., 2010. Evaluating
color descriptors for object and scene recognition.
PAMI.
SEMI-LOCAL FEATURES FOR THE CLASSIFICATION OF SEGMENTED OBJECTS
175
