
TOWARDS MORE FLEXIBLE BDI AGENTS
Saadi Adel, Maamri Ramdane and Zaïdi Sahnoun
LIRE Laboratory, Mentouri University, Constantine, Algeria
Keywords: BDI agents, Practical reasoning, Decision making, Goal’s attributes.
Abstract: BDI agents are among the most popular models for the development of intelligent agents. The practical
reasoning within the most of BDI models and architectures rely, in the best case, on three kinds of
attributes: The utility associated with a goal, the cost of a plan and the uncertainty associated with the
action’s effects. Based on a richer set of practical reasoning’s attributes, we propose a BDI architecture
which aims to provide a step towards more flexible BDI agents.
1 INTRODUCTION
In a number of applications and fields, the software
is required to be flexible and autonomous. This need
brought about the "intelligent agent" paradigm.
Because of the importance of this paradigm, the
artificial intelligence is sometimes defined as a
computer science subfield which aims to construct
agents behaving intelligently (Wooldridge and
Jennings, 1995). The interest in the agent technology
gives rise to a range of models. The Belief-Desire-
Intention (BDI) models are among the best known
approaches to design intelligent agents. The BDI
formalism lies on the Bratman's philosophical theory
(Bratman et al., 1988) which argues the importance
of intention in resource-bounded practical reasoning
(Rao and Georgeff, 1991). Indeed, an intention
constrains and supervises the future decisions
(Wooldridge, 1999). Moreover, commitment
embodies a trade-off between the reactivity and
goal-directedness of an agent-oriented system (Rao
and Georgeff, 1995). This trade-off is important for
an agent situated in a dynamic environment with
time constraints.
The practical reasoning within the most of BDI
models and architectures (Bratman et al., 1988; Rao
and Georgeff, 1991, 1995; Schut et al., 2004; Casali
et al., 2009; Rahwan and Amgoud, 2006) rely, in
the best case, on three kinds of attributes: The utility
associated with a goal, the cost of a plan and the
uncertainty associated with the action’s effects.
Based on a richer set of practical reasoning’s
attributes, we detail the generic BDI architecture
described in (Wooldridge, 1999). The resultant
architecture aims to provide a step towards more
flexible BDI agents. In this paper, we define the
flexibility of an agent as the ability, of the agent, to
change its behaviour according to the situation. This
definition was inspired from the definition of the
adjective “flexible”, taken from “Cambridge
Avanced Learner’s Dictionary”, which means to be
able to change or to be changed easily according to
the situation.
From the BDI agents’ literature, it is worth
noticing that there is no consensus about the
definition of the concept of goal, and its relation
with desire and intention. In our BDI architecture,
we adopt the same point of view about goal as in
(Morreale et al., 2007):
Desires and intentions are mental attitudes
towards goals, which are in turn considered as
descriptions of objectives. Thus, “pursing the
goal g” is only a desire if the agent is not yet
committed to it, due to some reason. On the
other hand, “pursuing the goal g” becomes an
intention when the agent is committed to it and
work to achieve it. (p. 336)
We find the same point of view concerning the
relation between goal, desire, and intention, in
(Braubach et al., 2004). In this last work, each goal
has a life cycle which is composed of some states.
Each state expresses a different agent’s attitude
toward the goal. The agent can see the goal as
merely desired (There is a desire toward the goal,
i.e., the goal has the state “option”) because it
believes that the goal is not possible. On the other
hand, the agent considers that pursuing the goal is an
136
Adel S., Ramdane M. and Sahnoun Z..
TOWARDS MORE FLEXIBLE BDI AGENTS.
DOI: 10.5220/0003720801360145
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 136-145
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
intention (There is an intention toward the goal, i.e.,
the goal has the state “active”) when it is currently
trying to achieve it. In our architecture, the agent’s
decision making process is based on the
management of the state transitions of goals. The
state of the goal is among the important attributes of
the practical reasoning. For the other attributes, we
inspired them from the work of Beaudoin (1994).
This later provides a detailed analysis of the concept
of goal, which suggests a rich set of goal’s attributes.
The processes that operate on goals were also
presented. Nevertheless, as Beaudoin affirms in
(Beaudoin, 1994), the proposed architecture is broad
and shallow (i.e., which includes a large and rich set
of functions and capabilities but which are not
sufficiently detailed).
The next section of this paper gives an overview
about the generic architecture of BDI agents. Section
3 presents the proposed architecture. The last section
ends with conclusion and perspectives.
2 THE GENERIC BDI
ARCHITECTURE
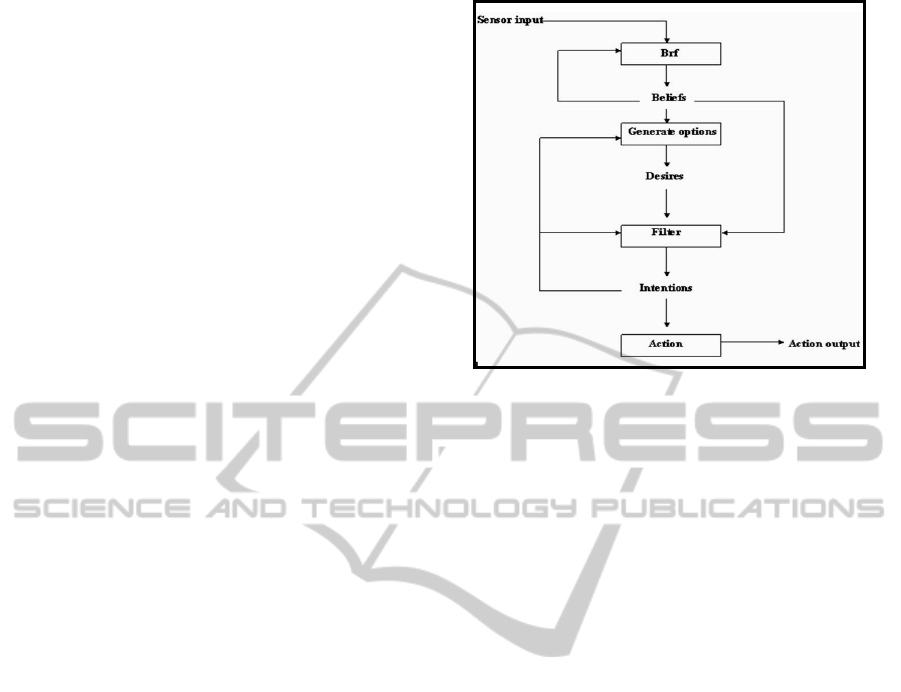
The generic architecture of BDI agents contains the
following components (Wooldridge, 1999):
A set of current beliefs.
A belief revision function (Brf): It is a function
which, on the basis of perceptual input and the
agent's current beliefs, produces a new set of
beliefs.
An option generation function: It determines
the options (desires) available to the agent, on
the basis of its beliefs and intentions.
A set of current options: It represents possible
courses of actions available to the agent.
A filter function (filter): On the basis of current
beliefs, desires, and intentions, this function
determines the agent's intentions.
A set of current intentions: This set represents
the current focus of the agent.
An action selection function: It determines an
action to perform on the basis of current
intentions.
In the next section, based on a rich set of
practical reasoning’s attributes, we are going to
detail the generic BDI architecture.
Figure 1: A generic BDI architecture (From (Wooldridge,
1999)).
3 PRESENTATION OF THE
ARCHITECTURE
The proposed architecture is structured in 6 data
structures constituting the agent’s internal state S
and 9 modules (noted in italic) defining the set C of
modules (See Figure 2):
Agent = S∪C
(1)
with: S={M, B, LP, SP, G, I_M_Q} and C={MU,
BR, GG, FS, F, AE, DTUM, APU,GM }.
3.1 The Agent’s Internal State
The internal state of the agent, noted by S, contains
the following 6 data structures:
M is the motives set. Motives can be viewed as
higher-level non-derivative components that
characterize the agent and from which goals are
generated (Munroe et al, 2003; Norman and
Long, 1995a, 1995b). In our architecture, each
motive m∈M is viewed as a record m=<Pr,
Alt, I> with m.Pr ∈[0, 1] is the priority of the
motive m, m.Alt is the set of all alternative
goals that can be generated from m, and m.I
∈[0, 1] is the intensity of m, which is updated as
the environment changes.
B is the beliefs set. It contains what the agent
knows about the world.
LP is the plan library of the agent. We assume
that a plan p is composed from a goal attribute
gl (the goal for which the plan will be
executed), a pre-condition p-c (The condition
TOWARDS MORE FLEXIBLE BDI AGENTS
137

that must be true for p to begin execution), an
in-condition i-c (The condition that must
remains true during the execution of p), the
body b (The actions composing p), a post-
condition e or plan’s effects, c∈[0, 1] the cost of
executing p, and r the probability of achieving g
if we apply p. We note p as a record p=<gl, p-c,
i-c, b, e, c, r> (This structure of a plan was
inspired from (Casali et al., 2005; Thangarajah
et al., 2003)). A plan p, which is not in
execution, is said to be an applicable plan, in
the current situation, for a goal g, iff gl=“g” and
the pre-condition p-c of p is satisfied in the
current situation. In the same manner, we say
that a plan p, which is actually trying to achieve
g, is an applicable plan, in the current situation,
iff gl=“g” and the in-condition i-c of p is
satisfied in the current situation.
Figure 2: The proposed architecture (To avoid overload in
the figure, we have omitted the BR module).
SP is the set of plans whose execution was
suspended for some reason (For example
because the in-condition is actually not
satisfied).
G is the goals set. In our work the goal g is
viewed as a record of the following properties :
g = <Target, State, U, Motiv, t
begin
, t
deadline
,
t
deadline-AE
, t
Urg0
, t
Urg1
, Urg, Interrupted,
Prevented, Waited_Int, App-Plans,
A-Plan>
(2)
where:
- g.Target represents the world state the agent wants
to bring about.
- g.State∈{“New”, “Ready”, “Prevented”,
“Active”, “Suspended”} is the state of the goal:
g.State=“New” means that g is not actually pursued
by the agent and that g has no applicable plans in the
current situation. This state is considered as a
“waiting” state for g, where g waits for the
availability of applicable plan.
g.State=“Ready” means that g has at least one
applicable plan but is not actually pursued by the
agent. This state is considered as a waiting state for
g, where g waits for the activation.
g.State=“Active” means that the agent is actually
trying to achieve the goal g (In this case, g is called
an active goal, i.e., a goal towards which the agent
has an intention). In this case, the agent is either
executing a plan in order to achieve g or either
waiting for an applicable, free-conflict plan for g.
We say that a plan p is in conflict with another plan
p’ if the plans’ effects p.e and p’.e are inconsistent.
In this paper, we say that a plan p is a free-conflict
plan if it doesn’t conflict with plans currently
achieving active goals.
g.State=“Prevented” means that the goal g is
waiting for the termination of active goals g’ which
are in conflict with g or is waiting for the urgency
event (i.e., when g.Urg=1). g was considered for the
activation but was prevented from the activation, by
active goals g’ (g was prevented from the activation,
because g is in conflict with active goals g’ and g is
not urgent. See section 3.2, especially the paragraph
concerning the filter module for more details). When
the active goals g’ terminate or when the urgency
event g.Urg=1 appears, the goal g is moved from
the “prevented” state to “Ready” or “New” state
(according to the availability of applicable plans).
g.State=“Suspended” means that the goal g is
waiting for the termination of an active conflicting
goal g’. This later caused the interruption and the
suspension of the execution of g because g’ is urgent
and more important for the agent than g. When the
ICAART 2012 - International Conference on Agents and Artificial Intelligence
138

active goal g’ terminate, the goal g is moved from
the “suspended” state to “Ready” or “New” state
(according to the availability of applicable plans).
It is worth noticing that in the case where g.State
∈{“New”, “Ready”, “Prevented”, “Suspended”},
pursuing the goal g is only a desire. Whereas in the
case g.State=“Active”, pursuing g becomes an
intention (See the introduction of the paper for more
details about our point of view about the relation
between goal, desire, and intention). In the
remainder of this paper, we will use the previous
goal’s states as adjectives of the world “goal”. For
example, when we say “Prevented goal”, we mean
that we have a goal with the state “Prevented”.
- g.U ∈[0, 1] is the utility value associated with the
goal g. The calculation details of g.U are outside the
scope of this paper.
- g.Motiv is the motive that gives rise to the goal g.
- The interval [g.t
begin
, g.t
deadline
] represents the
period during which the goal g must be achieved. If
there is no imposed beginning time to g, we take
g.t
begin
=0. Similarly, in the case where there is no
imposed deadline time we write g.t
deadline
= +∞.
- g. t
deadline-AE
is a deadline time that is attributed to
an active goal g if the plan that is actually executed
to achieve g is not applicable in the current situation
and if g.t
deadline
= +∞ (See section 3.2, precisely the
paragraph concerning the “action execution” module
for more details). If there is an imposed deadline
g.t
deadline
, g. t
deadline-AE
will take the value +∞.
- The interval [g.t
Urg0
, g.t
Urg1
] with g.t
Urg0
≥g.t
begin
and g.t
Urg1
<g.t
deadline
represents the critical period
during which the agent must begin the realization of
g. Otherwise, it is greatly probable that the execution
time of g will exceed the deadline time g.t
deadline
, and
thus it will fail (In this paper, we do not consider the
case of partial achievement of a goal). In the case
where g.t
deadline
= +∞ there is no urgency for the
agent to begin the realization of the goal. We
express this situation by taking g.t
Urg0
= g.t
Urg1
= +∞.
- g.App-Plans is the set of applicable plans available
in the current situation, for the goal g. The two plans
set LP and SP are taken into account when
calculating the set of applicable plans.
- g.Urg is the urgency function. It is a time-varying
function (In the following formula of Urg, t
represents the time) and is derived basically from the
interval [g.t
Urg0
, g.t
Urg1
]:
If the urgency function of g take 1 then the agent
must immediately begin the realization of g (If there
is no active goals conflicting with g and which are
more important than g). The calculation of urgency
function is inspired by the “alarm function” used to
calculate the motivation intensity (Norman and
g.Urg(t)=
1, If
((( g.State=“Ready”) or
(g.State∈{“Prevented”, “Suspended”}
and g.App-Plans≠∅)) and (g.t
deadline
≠+∞ ) and (t∈[g.t
Urg0
, g.t
Urg1
]) and
( ∃g2∈ (g.Motiv).Alt:
g2.State=“Active”))
{This later existential condition
means that it doesn’t exist an
alternative goal to g that is
actively pursued by the agent}
or g.Urg(t-1)=1
0, Otherwise
(3)
Long, 1995b). If the time variables t
begin
, t
deadline
,
t
Urg0
, t
Urg1
are unknown or cannot be derived for the
goal g, then the urgency function g.Urg is derived
basically from the intensity of the motive g.Motiv
that leads to g. In this case, it is urgent to begin the
execution of g if the intensity (g.Motiv).I exceeds
some urgency threshold.
g.Urg(t)=
1, If
((( g.State=“Ready”) or
(g.State∈{“Prevented”, “Suspended”}
and g.App-Plans≠∅)) and
(g.Motiv).I ≥ urgency-threshold)
and ( ∃g2∈ (g.Motiv).Alt :
g2.State=“Active”))
or g.Urg(t-1) = 1
0, Otherwise
(4)
- g.Interrupted is a variable that takes 1 if the
execution of g was interrupted by another conflicting
goal. It takes 0 when g resumes its execution or
when g was not interrupted until now.
- g.Prevented is a variable that takes 1 if g was
considered for the activation but was prevented from
the activation, by another conflicting active goal. It
takes 0 when g was not yet considered for the
activation or when g is considered for the activation
but g becomes active.
- g.Waited_Int contains the active goals that caused
the interruption or the prevention of g.
- g.A-Plan is the plan that is actually executed by
the agent, to achieve the goal g.
After giving the structure of a goal, we will give
in what follows the structure of the goals set G.
The goals set G is structured in 6 queues (See
Figure 2):
- NG_Q (New Goals Queue): It contains “New”
goals.
- RG_Q (Ready Goals Queue): It contains “Ready”
goals.
TOWARDS MORE FLEXIBLE BDI AGENTS
139

- PG_Q(Prevented Goals Queue): It contains
“Prevented” goals.
- I_Q (Intentions Queue) and W_Q (Waiting
intentions Queue): I_Q contains active goals that
are actually achieved via plans. W_Q contains
active goals that are waiting for an applicable, free-
conflict plan.
- SG_Q (Suspended Goals Queue): This queue
contains “Suspended” goals.
We conclude the presentation of goals set G by
defining the notion of “goals conflict” (In this paper,
we focus on the conflict between a ready
goal∈RG_Q and an active goal∈ I_Q∪W_Q).
A ready goal g is said to be in conflict with an
active goal g’∈I_Q, iff all the applicable plans of g
(i.e., the plans of g.App-Plans) are in conflict with
g’.A-Plan. If g has an applicable plan that doesn’t
conflict with g’.A-Plan then g and g’ are not in
conflict. On the other hand, a ready goal g is said to
be in conflict with an active goal g’∈W_Q iff the
goal targets of g and g’ (i.e., g.Target and g’.Target)
are inconsistent. In this paper we assume that the
targets of two alternative goals g, g’ (i.e., g.Motiv
=g’.Motiv) are inconsistent. This assumption leads
to the following property:
∀g∈R_G, ∀g’∈ I_Q∪W_Q: g.Motiv =
g’.Motiv ⇒ g is in conflict with g’
(5)
After presenting the set G, we give, in what
follows, the last data structure included in the
agent’s internal state S.
I_M_Q (Internal Messages Queue): This
queue receives all messages addressed to the
module GM (Goals state Manager) from other
agent’s modules (For more details about the
module “GM” see the subsection 3.2).
3.2 The Modules of the Architecture
The proposed architecture contains the 9 following
modules working in parallel: MU, BR, GG, FS, F,
AE, DTUM, APU, GM (These modules define the
set C). The MU module (Motivations Updater) is
responsible of updating the agent’s motives set (M).
On the basis of beliefs set (B), (M), and active goals
in I_Q queue, the GG module (Goals Generator)
generates and updates the set of new goals (the
NG_Q queue). The GM module (Goal state
Manager) on the basis of messages transmitted by
the other modules, updates the states of the goals.
The FS module (Filter Scheduler) selects one ready
goal, from the set of ready goals, i.e., the RG_Q
queue (The FS module sorts the ready goals g on the
basis of the motive priority (g.Motiv).Pr, the utility
g.U, the urgency measure g.Urg, the flags
g.Interrupted and g.Prevented). The chosen ready
goal g is transmitted to the F module (Filter), which
will decide about its activation (i.e., adding it to the
I_Q queue). If F decides to activate g, then the
active goals g’∈I_Q∪W_Q that are in conflict with
g will be moved to the “Suspended” state, i.e., added
to SG_Q queue (If g conflict only with an active
goal g’ which is an alternative to g, then g’ will be
moved to NG_Q or RG_Q queue, according to the
availability of applicable plan). In the case F decides
to not activate g, then g will be moved to the
“Prevented” state. The “prevented” and the
“suspended” goals g will be moved to the “Ready”
or “New” state (According to the availability of
applicable plans) when the goals g’ that conflict with
g (i.e., causing the suspension/prevention) terminate.
The prevented goals g are also moved to the
“Ready” or “New” state when the urgency event
appears, i.e., g.Urg= 1 (The termination of a goal
and the urgency of a prevented goal are signalled to
the “Goal state Manager”, by the DTUM module
(Goal’s Deadline, Target, and Urgency Monitor)).
The AE module (Action Execution) is
responsible
of the achievement of active goals via plans. If this
module finds that the executed plan of an active goal
g (i.e., g.A-Plan) is not applicable in the current
situation (the in-condition of g.A-Plan is not
satisfied) then g will wait in the active state (in the
W_Q queue) until the availability of an applicable
and free-conflict plan for g. The waiting time of g in
W_Q queue should not exceed the deadline g.t
deadline
.
If g has no deadline then the AE module will
associate to g a deadline t
deadline-AE
.
In the following, we give details of the different
modules:
MU (Motivations Updater): This module is
responsible of updating motives set. The details
of updating motivations process are outside the
scope of this paper.
BR (Belief Revision and update): This module
updates and revises the set B on the basis of
new perceptions. The details of this module are
outside the scope of this paper.
GG (Goals Generator): This module generates
and updates the set of new goals on the basis of
motives set M, beliefs set B, and I_Q queue.
The produced goals are initially in “New” state,
and then the “Goal state manager” updates their
states in response of incoming events (see the
paragraph about the “Goal state manager” for
details). The details of this module are outside
the scope of this paper.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
140

FS (Filter Scheduler): The task of this module
is to select from the “ready goals queue”
(RG_Q) one ready goal that will be considered
for the activation by the filter module F (See the
next paragraph concerning the filter). The ready
goals g are sorted by FS on the basis of the
motive priority (g.Motiv).Pr, the utility g.U, the
urgency measure g.Urg, the flags g.Interrupted
and g.Prevented.
A ready goal g pertains to one of the 4
followings categories:
- The category RED1: Contains ready goals g with
g.Urg=1. The goals of this category are placed by
FS in the 1
st
places of RG_Q.
- The category RED2: Contains ready goals g with
g.Interrupted=1 and g.Urg=0. The goals of this
category are placed in RG_Q, after goals of RED1
category.
- The category RED3: Contains ready goals g with
g.Prevented=1 and g.Interrupted=g.Urg=0. The
goals of this category are placed in RG_Q, after
goals of RED2 category.
- The category RED4: This category contains ready
goals g with g.Urg=g.Interrupted= g.Prevented=0.
The goals of this category are placed in RG_Q, after
goals from RED3 category.
Assume that g1, g2, g3, and g4 are ready goals, such
that: g1∈RED1, g2∈RE2, g3∈RED3, and
g4∈RED4, then we have the following propriety:
g1 >
RG
g2 >
RG
g3 >
RG
g4
(6)
where >
RG
is the precedence relation over ready
goals (g >
RG
g’ means that g precedes and is placed
before g’ in RG_Q).
Inside any category RED1, RED2, RED3, and
RED4, the ready goals g are sorted according to the
motive priority (g.Motiv).Pr. If two ready goals
inside the category have the same motive priority
then they will be sorted according to the utility g.U.
Assume that we have two ready goals g and g’ from
the same category RED
i
with i∈{1,2,3,4}, then we
obtain the two following proprieties:
∀g, g’∈ RED
i
:
(g.Motiv).Pr > (g’.Motiv).Pr ⇒ g >
RG
g’
(7)
∀
g
,
g
’∈ RED
i
: (
g
.Motiv).Pr=(
g
’.Motiv).Pr
and g.U > g’.U ⇒ g >
RG
g’
(8)
The ready goal that is transmitted by the module FS
to the module F is the goal placed in the head of
RG_Q.
F (Filter): This module decides about the
inclusion of ready goal g, chosen by the “filter
scheduler”, into the “Intentions queue”.
If g has an applicable and free-conflict plan (i.e.,
g doesn’t conflict with active goals of I_Q) and is
not in conflict with active goals of W_Q, then the
filter adds g to the “Intentions queue”. In the case of
conflict (i.e., there is no applicable and free-conflict
plans for g or g conflicts with goals of W_Q), if the
filter decides to include g in I_Q (The filter takes
this decision, if g conflicts only with an active goal
which is an alternative or g is an urgent goal and g is
more important than the active goals conflicting with
it) then all active goals conflicting with g are
moved to the “Suspended goals queue” (If g conflict
only with an active goal g’ which is an alternative to
g, then g’ will be moved to RG_Q or NG_Q queue,
according to the availability of applicable plan). In
the case F decide to not activate g, then g will be
moved to the “Prevented” state.
Before seeing the filter algorithm, we give some
functions that will be used in it (Some functions are
used by the other modules):
- Conflict-free(g∈G): This function returns the free-
conflict plans of the goal g.
- Net-utility (g∈G, p∈LP∪SP): Assuming that p is
a plan for the goal g (i.e., p.gl=“g”), this function is
calculated by the formula:
Net-utility (g, p) = p.r (g.U+(1-p.c)) /2
(9)
with p.r is the probability of attaining g if we apply
the plan p and p.c is the cost of executing the plan p
(This Net-utility function was proposed in (Casali,
2005) to calculate the intention degree). The Net-
utility function considers 3 parameters: the utility
value of the goal g, the cost of the plan p achieving
g, and the probability of achieving g if we apply p.
- Remaining (p∈LP): This function returns the
actions of p that were not yet executed.
- I-Conf-G (g∈RG_Q): This function returns the set
of active goals whose executed plans are in conflict
with the applicable plans of goal g.
- W-Conf-G (g∈RG_Q): This function returns the
set of active goals in W_Q queue, in conflict with
goal g.
- I-Conf-PL (p∈ LP∪SP): This function returns the
set of active goals whose executed plans are in
conflict with the plan p.
- Net-utility2(g, p) is calculated by the formula:
Net-utility2(g, p) = (Net-utility(g, p)+
(1 / card(I-Conf-PL(p)))) /2
(10)
with I-Conf-PL(p)≠∅ and card(S) gives the
number of elements in the set S. The Net-utility2
function considers 4 parameters: the utility value of
the goal g, the cost of the plan p achieving g, the
TOWARDS MORE FLEXIBLE BDI AGENTS
141

probability of achieving g if we apply p, and the
number of active goals whose executed plans
conflict with p. When the value of Net-utility
increases and card(I-Conf-PL) decreases, the value
of Net-utility2 increases
- BEST-PLAN-1(g∈G, s⊂ LP∪SP) is a function
that retrieves which plan p’∈s for g maximizes the
function Net-Utility(g, p). Its algorithm is described
(in an abstract manner) by:
BEST-PLAN-1(g∈G, s⊂ LP∪SP): LP∪SP
Begin
Find p’∈s which is defined by:
Net-utility(g,p’)=Max
p∈s
Net-utility(g,p)
Return p’
End
- BEST-PLAN-2(g∈G, s⊂ LP∪SP) is similar to
the function BEST-PLAN-1. The only difference is
that BEST-PLAN-2 uses Net-utility2 instead of
Net-utility
- In what follows, in the Filter algorithm, the
procedure calls: ADD-I-Q, BEST-ALT, BEST-T-
GS, PREVENTED are addressed to the goal state
manager (See the last paragraph in this section, for
more details about the GM module).
Filter Algorithm (g∈RG_Q)
Begin
If
g.Prevented=1 Then g.Prevented←0
App-free-plans ← g.App-Plans ∩
Conflict-free (g)
If
(App-free-plans ≠ ∅)
{There is at least an applicable and
free-conflict plan for g}
and
(W-Conf-G(g)=∅)
{There is no active goal in W_Q
queue which conflicts with g}
Then
g.A-Plan←BEST-PLAN-1(g,
App-free-plans)
{The plan g.A-plan is the one that
maximises the function Net-utility}
ADD-I-Q(g) {Move the ready goal g
to the I_Q queue}
Else
{g is in conflict with active
goals∈I_Q∪W_Q}
If
g.Urg = 0 Then {g is not
urgent}
If
g is only in conflict with an
Alternative goal g’∈ I_Q
Then
interesting-plans ← ∅
For
each p∈ g.App-Plans Do
If
Net-utility(g, p) >
Net-utility(g’, Remaining(g’.A-Plan))
{The goal g taken with the plan p is
more interesting than the alternative
goal g’} Then
interesting-plans ←
interesting-plans ∪ {p}
End For
If
interesting-plans ≠ ∅ Then
g.A-Plan←BEST-PLAN-1(g,
interesting-plans)
BEST-ALT (g, g’)
{Replace the active goal g’ by
the alternative g}
End If
Else
If
g is only in conflict with
an alternative goal g’∈ W_Q
Then
g.A-Plan←BEST-PLAN-1(g,
g.App-Plans)
BEST-ALT (g, g’)
Else
{the no urgent goal g
conflicts with one or several
active goals g’}
PREVENTED(g){make g in the
“Prevented” state}
Else
{g.Urg=1, i.e. g is an urgent
goal which conflicts with one or
several active goals g’}
priority←False
interesting-plans ← ∅
If
App-free-plans= ∅ Then
For each p∈g.App-Plans Do
If
Net-utility(g, p)>
Net-utility (g’, g’.A-Plan))
{i.e. the goal g taken with the
plan p is more important than the
set I-Conf-PL(p)}
Then interesting-plans ←
interesting-plans ∪ {p}
End For
If W-Conf-G(g)≠∅ Then
If
∀g’∈W-Conf-G(g):
(g’.Motiv).Pr<(g.Motiv).Pr
Then
priority ←True
If(interesting-plans ≠ ∅) and
(W-Conf-G(g)= ∅)
Then
g.A-Plan←BEST-PLAN-2(g,
interesting-plans)
{The plan g.A-plan is the one that
maximises Net-utility2}
BEST-T-GS(g, I-Conf-PL(g.A-Plan))
∑
∈ )p(PL-Conf-I'g
ICAART 2012 - International Conference on Agents and Artificial Intelligence
142

{replace active goals g’ by g}
End If
If (priority=True)
and (App-free-plans ≠∅)
Then
g.A-Plan← BEST-PLAN-1(g,
App-free-plans)
{The plan g.A-plan is the one that
maximises Net-utility}
BEST-T-GS(g, W-Conf-G(g))
End If
If interesting-plans ≠ ∅)
and (priority=True)
Then g.A-Plan←BEST-PLAN-2(g,
interesting-plans)
BEST-T-GS (g, I-Conf-PL(g.A-Plan)
∪W-Conf-G(g))
End If
End If End
AE (Action Execution): This module is
responsible of the achievement of active goals
via plans. If this module finds that the executed
plan of an active goal g (i.e., g.A-Plan) is not
applicable in the current situation (The in-
condition of g.A-Plan is not satisfied) then g
will wait in the active state (in the W_Q queue)
until the availability of an applicable and free-
conflict plan for g. The waiting time of g in
W_Q queue should not exceed the deadline
g.t
deadline
. If g has no deadline then the AE
module will associate to g a deadline t
deadline-AE
.
We assume that t
deadline-AE
is the same for all
goals and will take the value t
w
.
Action execution Algorithm
Begin
While
True Do
While
(I_Q≠ ∅ ) Do
Repeat
Execute goals g of I_Q
Until
((∃g1∈I_Q: g1.A-Plan is
not applicable) or (∃g2∈W_Q:
g2.App-Plans∩Conflict-free(g2) ≠∅))
For all g1∈I_Q: g1.A-Plan is not
applicable Do
ADD-TO-SP(Remaining(g1.A-Plan))
{The ADD-TO-SP function is used to
add a suspended plan to the set SP}
If g1.t
deadline
=+∞
Then
g1.t
deadline-AE
← t
w
I_Q ← I_Q-{g1}
W_Q ← W_Q ∪{g1}
g1.A-Plan ←∅
End for
For all g2∈ W_Q:
g2.App-Plans∩Conflict-free(g2)≠∅ Do
If g2.t
deadline
=+∞
Then
g2.t
deadline-AE
← 0
g2.A-Plan← BEST-PLAN-1(g2,
g2.App-Plans∩Conflict-free(g2))
I_Q ← I_Q∪{g2}
W_Q ← W_Q-{g2}
End for
End While
End While End
DTUM (goal’s Deadline, Target, and Urgency
Monitor)
This module monitors the expiry of goals deadlines
t
deadline
/ t
deadline-AE
, the satisfaction of goals targets,
and the appearance of urgent prevented goals (i.e.,
prevented goals with Urg attribute equal to 1). In the
following we give its general algorithm (DELETE,
NEW, READY are messages addressed to the goal
state manager):
While True Do
If ∃g ∈G: g.t
deadline
expires Then
DELETE(g){i.e.,Delete the failed
goal g from G }
If ∃g∈W_Q: g.t
deadline-AE
expires Then
g.t
deadline-AE
← 0
NEW(g)
{i.e., moving g to the New goal
queue. g was failed to continue its
execution and is given another chance
to restart but from the new state}
End if
If
∃g∈G: g.Target is satisfied in
the current
situation Then DELETE(g)
If ∃g ∈PG_Q: g.Urg=1 Then
g.Waited_Int←∅
If g.App-Plans≠∅ Then
READY(g) {i.e., moving g to the
Ready goal queue}
Else
NEW(g)
End If
End while
APU (Applicable Plans Updater): This
module updates for each goal g the set of
applicable plans g.App-Plans. Also, it monitors
the new and ready goals. If it notices for a new
goal g that g.App-Plans≠∅, then it will send the
message READY(g) to the goal state manager.
If it notices for a ready goal g that g.App-
Plans=∅, then it will send the message NEW(g)
to the goal state manager.
GM (Goal State Manager): All the events
influencing the goal state are placed in the
queue I_M_Q. This later is monitored by the
module GM in order to manage and update the
TOWARDS MORE FLEXIBLE BDI AGENTS
143

goals states. The GM module associates for each
type of message one procedure. This module
contains the seven following procedures: ADD-
I-Q, BEST-ALT, BEST-T-GS, PREVENTED,
DELETE, NEW, and READY. In what follows
we give the general algorithms of BEST-ALT,
BEST-T-GS, and DELETE (The algorithms of
ADD-I-Q, PREVENTED, NEW, and READY
were omitted from the paper for a problem of
space):
BEST-ALT (g∈RG_Q, g’∈I_Q∪W_Q)
Begin
Remove g’from the corresponding queue
RG_Q ← RG_Q ∪ {g’}
g’.State← “Ready”
ADD-TO-SP(Remaining (g’.A-Plan))
g’.A-Plan ← ∅
RG_Q ← RG_Q - {g}
I_Q ← I_Q ∪ {g}
g.State← “Active”
If
g.Interrupted=1 Then
g.Interrupted ←0
End
BEST-T-GS
(g∈RG_Q, gs⊂ I_Q∪W_Q)
Begin
For
each g’∈gs Do
g’.Interrupted←1
If g’∈I_Q Then
ADD-TO-SP(Remaining(g’.A-Plan))
g’.A-Plan ← ∅
End If
g’. Waited_Int←g
Remove g’ from the corresponding queue
SG_Q ← SG_Q ∪ g’
g’.State← “Suspended”
End for
RG_Q ← RG_Q - {g}
I_Q ← I_Q ∪ {g}
g.State← “Active”
If g.Interrupted=1 Then
g.Interrupted←0
End
DELETE
(g∈G)
Begin
s←g.State
If
g.Target is satisfied in the
current situation
Then
For each g’∈G: g’.Motiv= g.Motiv Do
DELETE(g’)
Remove g from the queue associated
with the g.State
If s= “Active” Then
If ∃g’∈ SG_Q∪ PG_Q:
g∈g’.Waited_Int
Then
g’.Waited_Int← g’.Waited_Int-{g}
If g’.Waited_Int = ∅ Then
If g’.App-Plans≠∅ Then
READY(g’)
Else
NEW(g’)
End If
End If
End
4 CONCLUSIONS AND
PERSPECTIVES
In this paper, we argue that the first step towards
more flexible reasoning in the actual BDI models
and architectures is that the agent should consider
the different and varied attributes useful for the
decision making process (See (Beaudoin, 1994) for
an example of such attributes). In fact, the practical
reasoning within the most of BDI models and
architectures rely, in the best case, on three kinds of
attributes: The utility associated with a goal, the cost
of a plan and the uncertainty associated with the
action’s effects. We have presented in this paper a
BDI architecture based on a richer set of attributes
(Inspired from the work of Beaudoin (1994)) that
concerns fundamentally the characteristics of a goal
(We have used for example the two attributes
concerning the urgency and the state of a goal ). This
set of attributes is far from being exhaustive but it
constitutes a step towards a more complete one.
This set of attributes permitted us to detail the
generic model of BDI agents. In our architecture, the
module FS taken with the module F correspond to
the “filter” function of the generic BDI model. The
modules GG, BR, AE correspond respectively to the
generic BDI model’s functions: “option generation”
function, Brf function, and action selection function.
The decision making process in our agent is based
on the management of the state transitions of goals.
In fact, the proposed architecture includes the
module GM (Goal state Manager) which, on the
basis of the messages transmitted from other
modules, updates the states of the goals. The
presented work aims to provide a step towards more
flexible BDI agents. Nevertheless, some points
should be addressed in future works:
Incorporate other types of goals as
“maintenance goals”, i.e., maintain some world
state (Braubach et al., 2004). In this paper we
have used only one type of goals: “achievement
goals” (achieve some world state).
Treat the case of partial achievement of a goal.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
144

Detail the “motivations updater”, “goals
generator”, and “Belief revision and update”
modules. Besides, we plan to incorporate
uncertainty in the architecture and to study its
impact on the whole agent’s reasoning.
The actual version of the architecture considers
only one type of conflict between goals:
Conflict that takes into account the
inconsistencies between goals’ targets and
inconsistencies between plans’ post-conditions.
We plan to consider other kinds of goals
conflict as conflict caused by the
incompatibility between the post-condition of a
plan p and the pre-condition of another plan p’
(i.e., the execution of the plan p will prevent the
execution of the plan p’) (Rahwan and
Amgoud, 2006; Thangarajah et al., 2003).
Experiment and evaluate the architecture in a
simulated worlds and scenarios.
REFERENCES
Beaudoin, L., 1994. Goal processing in autonomous
agants. PhD Thesis, University of Birmingham.
Bratman, M. E., Israel, D. J., Pollack, M. E., 1988. Plans
and resource-bounded practical reasoning. Computa-
tional intelligence, 4(3), 49-355.
Braubach, L., Pokahr, A., Moltdt, D., Lamersdorf, W.,
2004. Goal representation for BDI Agent Systems. In:
Proceedings of ProMAS04.
Casali, A., Godo, L., Sierra, C., 2009. g-BDI: A Graded
Intensional Agent Model for Practical Reasoning, In:
Proceedings of MDAI 2009, 5–20.
Casali, A., Godo, L., Sierra, C., 2005. Graded BDI Models
For Agent Architectures. In: Leite, J., Torroni, P.
(Eds.), CLIMA V, Lecture Notes in Artificial
Intelligence LNAI 3487, 126-143.
Morreale, V., Bonura, S., Francaviglia, G., Centineo, F.,
Puccio, M., Cossentino, M, 2007. Developing
Intentional Systems with the PRACTIONIST
Framework. In Proceedings of the 5
th
IEEE
International conference on Industrial Informatics,
633-638.
Munroe, S. J., Luck, M., d’Inverno, M., 2003. Towards
motivated-based decisions for worth goals. In: V.
Marik, J., Mueller, Pechoucek (Eds.), Multi-agents
systems and applications III, LNAI, 2691, 17-28.
Norman, T. N., Long, D., 1995. Goal creation in
motivated agents. In: Wooldridge, M., Jennings,
N.R.(Eds.), Intelligent Agents: Theories, Architecture,
and Languages, LNAI, 890, 277-290.
Norman, T. N., Long, D., 1995. Alarms: Heuristics for the
control of reasoning attention. In: Proceedings of the
seventeenth annual conference of the cognitive science
society.
Rahwan, A., Amgoud, L., 2006. An Argumentation-based
Approach for Practical Reasoning. In: Proceedings of
AAMAS'2006, 347-354.
Rao, A., Georgeff, M., 1995. BDI agents: From theory to
practice. In: Proceedings of the First International
Conference on Multi-Agent Systems (ICMAS'95),
312-319.
Rao, A., Georgeff, M., 1991. Deliberation and its role in
the formation of intentions. In: Proceedings of the 7th
Conference on Uncertainty in Artificial Intelligence,
300-307.
Schut, M., Wooldridge, M., Parsons, S., 2004. The Theory
and Practice of IntentionReconsideration. Journal of
Experimental and Theoretical Artificial Intelligence,
16(4), 261-293.
Thangarajah, J., Padgham, L., Winikoff, M., 2003.
Detecting and avoiding interference between goals in
intelligent agents. In: Proceedings of AAMAS’03,
401-408.
Wooldridge, M., 1999. Intelligent Agents. In: Weiss, G.
(Eds), Multiagent Systems. The MIT Press.
Wooldridge, M., Jennings, N. R., 1995. Intelligent Agents:
Theory and Practice. Knowledge Engineering Review,
10(2), 115-152.
TOWARDS MORE FLEXIBLE BDI AGENTS
145
