
PROBABILISTIC ESTIMATION OF VAPNIK-CHERVONENKIS
DIMENSION
Przemysław Kle¸sk
Department of Methods of Artificial Intelligence and Applied Mathematics, West Pomeranian University of Technology
ul.
˙
Zolnierska 49, Szczecin, Poland
Keywords:
Statistical learning theory, Machine-learning, Vapnik-Chervonenkis dimension, Binary classification.
Abstract:
We present an idea of probabilistic estimation of Vapnik-Chervonenkis dimension given a set of indicator
functions. The idea is embedded in two algorithms we propose — named A and A
′
. Both algorithms are based
on an approach that can be described as expand or divide and conquer. Also, algorithms are parametrized
by probabilistic constraints expressed in a form of (ε,δ)-precision. The precision implies how often and by
how much the estimate can deviate from the true VC-dimension. Analysis of convergence and computational
complexity for proposed algorithms is also presented.
1 INTRODUCTION
Vapnik-Chervonenkis dimension is an important no-
tion within Statistical Learning Theory (Vapnik and
Chervonenkis, 1968; Vapnik and Chervonenkis,
1989; Vapnik, 1995; Vapnik, 1998). Many bounds
on generalization or sample complexity are based on
it.
Recently, several other measures of functions sets
capacity (richness) have been under study. Particu-
larly, of great interest are covering numbers (Bartlett
et al., 1997; Anthony and Bartlett, 2009). In many
cases covering numbers can lead to tighter bounds
(on generalization or sample complexity) than pes-
simistic bounds based on VC-dimension. However,
the constructive derivation of covering numbers itself
is usually a challenge. One has to suitably take ad-
vantage of some properties of given set of functions
or of the learning algorithm and discover how they
translate onto a cover. One of such attractive results is
e.g. a result from (Zhang, 2002) related to regulariza-
tion. Qualitatively, it states that for sets of functions
linear in parameters and under a L
q
-regularization
(general q = 1,2,...) the bound on covering number
scales only linearly with the dimension of input do-
main. This allows to learn and generalize well with
a sample complexity logarithmic in the number of at-
tributes. On the other hand, there exist results where
the property used for the derivation of covering num-
bers is actually the known VC-dimension of some
set of functions (Anthony and Bartlett, 2009), which
again proves its usefulness.
Known are some sets of functions for which the
exact value of VC-dimension has been established
by suitable combinatorial or geometric proofs (of-
ten very complex). Here are some examples. For
polynomials defined over R
d
of degree at most n,
the VC-dim is
n+d
d
, see e.g. (Anthony and Bartlett,
2009). For hyperplanes in R
d
(which can be bases
for multilayer perceptrons) the VC-dim is d + 1 (Vap-
nik, 1998). For rectangles in R
d
the VC-dim is 2d
(Cherkassky and Mulier, 1998). For spheres in R
d
(which can be bases of RBF neural networks) the
VC-dim is d + 1 (Cherkassky and Mulier, 1998). As
regards linear combinations of bases as above the
VC-dim can typically be bounded by the number of
bases times the VC-dim of a single base (Anthony and
Bartlett, 2009, p. 154), this fact however requires usu-
ally a careful analysis.
Also, some analysis has been done in the subject
of computational complexity for the VC-dimension.
In particular, in (Papadimitriou and Yannakakis,
1996) authors take up the following problem ,,given
a set of functions F and a natural number k, is
VC-dim(F) ≥ k?”, i.e. one asks about a lower bound
of VC-dimension. And the problem is proved to be
logNP-complete.
Our motivation for this paper is to introduce an
idea for algorithms, which given an arbitrary set of
functions (plus a learning algorithm) would be able
to estimate its VC-dimension with an imposed proba-
bilistic accuracy. Such algorithms, if sufficiently suc-
262
Klesk P..
PROBABILISTIC ESTIMATION OF VAPNIK-CHERVONENKIS DIMENSION.
DOI: 10.5220/0003721702620270
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 262-270
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

cessful, could potentially replace the need for com-
plex proofs establishing the exact value of the VC-
dimension.
2 NOTATION, NOTIONS, TOOLS
We restrict considerations to the binary classification
learning problems.
Let F denote the set of indicator functions
1
, which
we have at disposal for learning. Let L denote the
learning algorithm we use to choose a single function
from F. This happens via the sample error minimiza-
tion
2
principle.
Let P denote the unknown joint probability distri-
bution defined over Z = X × Y from which training
pairs z = (x, y) are drawn, where in general x ∈ R
d
are input points and y ∈ {0,1} are corresponding class
labels. By z = {z
1
,z
2
,...,z
m
} we shall denote the
whole training sample of size m drawn from the prod-
uct distribution P
m
in a i.i.d. manner
3
.
For any fixed function f ∈ F the true generaliza-
tion error with respect to P is typically calculated as
er
P
( f) =
Z
Z
l
f
(z)dP(z), (1)
where l
f
is the following loss function
l
f
(z) = l
f
(x,y)
=
(
0, for f(x) = y;
1, for f(x) 6= y.
(2)
Therefore er
P
( f) expresses the probability of misclas-
sification of (x,y) drawn randomly from P. Since
P is unknown the learning algorithm L can only try
to minimize the frequency of misclassification on the
observed sample i.e.:
b
er
z
( f) =
1
m
m
∑
i=1
l
f
(z
i
). (3)
Let the solution-function of L be denoted by
b
f.
We now briefly remind some notions introduced
by Vapnik. Let l
F
= {l
f
: f ∈ F} denote the set of loss
functions generated by F. Consider the following set
l
f
(z
1
),...,l
f
(z
m
)
: f ∈ F
. (4)
It contains all distinguishable functions in l
F
re-
stricted to the fixed sample z
1
,...,z
m
. Throughout the
paper we shall denote (4) by (l
F
)
|z
1
,...,z
m
.
1
{0,1}-valued functions.
2
Alternatively also called empirical risk minimization
3
Independent, identically distributed. This means P
m
is
unknown but fixed.
Using a natural correspondence between indica-
tor functions and dichotomies of a set, Vapnik intro-
duces the notion of shattering. We say that l
F
shat-
ters a sample z
1
,...,z
m
if all its dichotomies can be
generated using functions from F, equivalently this
means that the number of distinguishable functions is
#(l
F
)
|z
1
,...,z
m
= 2
m
. The Vapnik-Chervonenkis dimen-
sion for l
F
(or equivalently for F) is equal to the size
of some largest sample that can be shattered.
It will be helpful to remind three more quantities:
• Vapnik-Chervonenkis entropy
H
F
(m) =
Z
Z
m
ln#(l
F
)
|z
1
,...,z
m
dP
m
(z
1
,...,z
m
),
(5)
which is an expectation of the logarithm of the
number of distinguishable functions;
• annealed entropy
H
F
ann
(m) = ln
Z
Z
m
#(l
F
)
|z
1
,...,z
m
dP
m
(z
1
,...,z
m
),
(6)
which is a logarithm of expected number of dis-
tinguishable functions;
• growth function
G
F
(m) = sup
z
1
,...,z
m
#(l
F
)
|z
1
,...,z
m
, (7)
which is supremum number of distinguishable
functions.
Known is the connection H
F
(m) ≤ H
F
ann
(m) ≤
lnG
F
(m), where the first inequality is due to Jensen
inequality. Known also is the fact, that VC-dim(F) is
equal to such an argument of G
F
after which it stops
growing exponentially.
As a tool, throughout the paper, we shall exten-
sively take advantage of one-sided Chernoff inequali-
ties (Hellman and Raviv, 1970; Schmidt et al., 1995),
which we now write down the following way
p− ν
m
≤
r
−lnδ
2m
, (8)
ν
m
− p ≤
r
−lnδ
2m
, (9)
where p is a probability of some event (that will be
of interest for us) and ν
m
is its frequency observed in
m independent trials. Each inequality holds true with
probability
4
at least 1− δ.
Also, in several places we are going to take ad-
vantage of Iverson notation [s], which returns 1 if the
statement s is true and 0 otherwise (Graham et al.,
2002).
4
The 1−δ is an outer probability calculated with respect
to probabilistic space defined over all random experiments
consisting of m independent trials.
PROBABILISTIC ESTIMATION OF VAPNIK-CHERVONENKIS DIMENSION
263

3 PROBABILISTIC SHATTERING
In this section we introduce several new notions,
which can be regarded as probabilistic versions of se-
lected notions reminded in the previous section. The
new notions are suitable for our purposes and give a
high-levelintuition on algorithms we are about to pro-
pose.
3.1 Distribution Dependence — Two
Conceptual Scenarios
We start with the following remark. It is the fact
that: shattering, growth function and VC-dimension
are distribution-independent notions. For our pur-
poses it will be convenient though to define notions
that are distribution-dependent, because we are going
to carry out probabilistic estimations. All the notions
shall therefore refer to P or P
m
. Two conceptual sce-
narios are possible here.
I. In this scenario we think of P as it was originally
defined — i.e. the joint probability distribution de-
fined over X× Y describing the specific learning
problem. And therefore we should treat all new
notions as distribution-dependent counterparts of
classical Vapnik’s notions.
II. In this scenario we conceptually replace P by
the uniform distribution. By doing so we sep-
arate ourselves from the specific problem. For
this purpose, we only need to assume a bound-
edness of X. The P will still explicitly appear
in the notions and formulas. But, we can then
agree (as a form of convention) to look at the no-
tions as distribution-independent or at least ‘orig-
inal problem’-distribution-independent, since the
uniformness does not favor any samples.
The reader can therefore treat further considera-
tions in either context — of scenario I or II. In both
scenarios we shall assume that we can freely and nu-
merously redraw samples from P.
3.2 New Notions
Definition 1. We say that µ
F
(m) is a shatterability
measure with respect to the probability distribution
P
m
, and is calculated as follows
µ
F
(m) =
Z
Z
m
[#(l
F
)
|z
1
,...,z
m
= 2
m
]dP
m
(z
1
,...,z
m
).
(10)
Intuitively the shatterability measure expresses
how frequently one ‘comes across’ samples drawn
from P
m
which can be shattered. We suggest to
think of shatterability measure in conjunction with
the growth function G
F
(m), see (7). Imagine some
method trying to discover the argument z
1
,...,z
m
in
P
m
for which the supremum is attained. Of course for
strictness, we must remind that firstly the definition of
G
F
(m) is distribution-independent and secondly even
if it was distribution-dependent then the supremum
could be attained on sets of measure zero. Never-
theless, the intuition that the smaller µ
F
(m) the more
difficult it is to indicate the supremum represented by
G
F
(m) is true. In particular if G
F
(m) < 2
m
then cer-
tainly µ
F
(m) = 0.
Definition 2. We say that a set of indicator functions
F is an m-shatterer with respect to P
m
(or: shatters
some samples of size m drawn from P
m
) if µ
F
(m) > 0.
Definition 3. We say that a set of indicator functions
F is not an m-shatterer with respect to P
m
everywhere,
if the two conditions are met:
1. µ
F
(m) = 0,
2. ∄ z
1
,...,z
m
such that #(l
F
)
|z
1
,...,z
m
= 2
m
.
Definition 4. We say that a set of indicator functions
F is not an m-shatterer with respect to P
m
almost ev-
erywhere, if the two conditions are met:
1. ∃ z
1
,...,z
m
such that #(l
F
)
|z
1
,...,z
m
= 2
m
,
2. µ
F
(m) = 0.
The complementary definitions above followfrom
the arguments discussed earlier, and the almost every-
where condition takes into account that the case where
2
m
dichotomies are feasible but for sets (samples) of
measure zero.
3.3 Probabilistic Estimation of
VC-dimension — Sketch of Idea
We now sketch an idea according to which the algo-
rithms to be presented later shall work.
Suppose that for given sample of size m we exe-
cute multiple times (say n times) an experiment con-
sisting of drawing a sample z
1
,...,z
m
from P
m
and
checking exhaustively if all its dichotomies are fea-
sible, i.e. checking if #(l
F
)
|z
1
,...,z
m
= 2
m
. If for any
experiment this is true, then we can stop (before n is
reached), since certainly VCdim(F) ≥ m and we can
try to increase the sample size. If this event did not
occur in any experiment, then by means of Chernoff
inequality we have that with probability at least 1− δ:
µ
F
(m) ≤ 0+
r
−lnδ
2n
. (11)
We write down 0 explicitly on purpose — it is the
observed frequency of the event ‘all dichotomies are
ICAART 2012 - International Conference on Agents and Artificial Intelligence
264

feasible on random sample’. In that case we shall de-
crease the sample size. We would also like to intro-
duce a probabilistic precision parameter for the algo-
rithm. We name it (ε,δ)-precision, 0 < ε,δ < 1. If we
insert ε :=
p
−lnδ/(2n), it follows that the needed
number of experiments is n = ⌈− lnδ/(2ε
2
)⌉.
Now, by analogy to the definition 4, we introduce
the following definition.
Definition 5. We say that a set of indicator functions
F is not a (m, ε,δ)-shatterer with respect to P
m
if with
probability at least 1− δ:
µ
F
(m) ≤ ε.
In simple words we say (with an imposed proba-
bilistic precision) that F does not shatter samples of
size m, if the probability that 2
m
dichotomies on a ran-
dom sample are feasible is suitably small.
Now, we define the probabilistic VC-dimension.
Definition 6. We say that the probabilistic
(ε,δ)-VC-dimension for the set F equals m, we
write
VCdim
ε,δ
(F) = m,
if there exists a sample of size m that can be
shattered by F and simultaneously F is not a
(m+ 1,ε,δ)-shatterer.
4 ALGORITHM A
The algorithm A, we are about to propose, returns the
probabilistic dimension VCdim
ε,δ
(F). This value is
an estimate of the true VC-dimension.
First, we present an auxiliary algorithm called B,
which will be invoked by the main algorithm A in a
loop. The algorithm B works as the checker of feasi-
bility of all dichotomies given a fixed sample, accord-
ingly to the sketch from the section 3.3. The algo-
rithm returns 1 when all dichotomies are feasible and
0 otherwise.
B(F;z
1
,...,z
m
)
1. For all (t
1
,...,t
m
) ∈ {0,1}
m
:
1.1. Create a temporary training sample S =
(x
1
,t
1
),...,(x
m
,t
m
) and execute learning algo-
rithm L on it, which yields
b
f.
1.2. If
b
er
S
(
b
f) > 0 return 0.
2. Return 1.
Figure 1: Auxiliary algorithm B.
We now present the algorithm A which works with
an imposed (ε,δ)-precision, see the Fig. 2. As argu-
ments for A, apart from F we also enlist P, with solely
such an intention that we will be able to draw multiple
samples from it, nothing more (since P in general can
be unknown, recall scenario I).
A
ε,δ
(F, P)
1. Set m
L
:= 1, m
U
:= ∞, m := m
L
.
2. Repeat while m
U
− m
L
> 1:
2.1. Set s := 0.
2.2. Repeat n = ⌈−lnδ/(2ε
2
)⌉ times:
2.2.1 Draw a sample z
1
,.. .,z
m
from P
m
.
2.2.2 If B(F;z
1
,.. .,z
m
) = 1 then set s := 1 and jump
out of the loop 2.2.
2.3 If m
U
= ∞:
2.3.1 If s = 1 then set m
L
:= 2m, m := m
L
.
2.3.2 Else set m
L
:= 1/2m, m
U
:= m, m := (m
L
+
m
U
)/2.
2.4 Else
2.4.1 If s = 1 then set m
L
:= m, m := (m
L
+ m
U
)/2.
2.4.2 Else set m
U
:= m, m := (m
L
+ m
U
)/2.
3. Return ⌊m
L
⌋.
Figure 2: Algorithm A.
The algorithm uses an approach that could be de-
scribed as expand or divide and conquer. At the start
we set the lower bound m
L
and the current sample size
m to 1, whereas we set the upper bound m
U
to infin-
ity. At first, as the algorithm progresses and all di-
chotomies prove feasible (s flag equals 1), the tested
sample sizes are doubled (step 2.3.1.). Let us call it
the expand-phase. When a moment is reached such
that all dichotomies are not feasible despite n trials,
the algorithm suitably sets m
L
and m
U
(no longer in-
finite) and puts the next sample size m to be tested in
the middle of m
L
and m
U
(step 2.3.2.). This moment
starts the divide-phase. Since then, all next execu-
tions of the main loop (step 2) make the algorithm
enter step 2.4. and suitably narrow down the interval
[m
L
,m
U
) until the stop condition is reached.
The form of the return value ⌊m
L
⌋ requires a short
explanation. The floor function is meant to handle
the special case when after the first iteration of the
main loop (step 2.) the s flag is already equal 0. Then
halfening (step 2.3.2.) causes m
L
to be 1/2, and since
the stop condition is reached we want to correct this
value to 0.
5 CONVERGENCE AND
COMPUTATIONAL
COMPLEXITY ANALYSIS
We will show that it is convenient to analyze con-
PROBABILISTIC ESTIMATION OF VAPNIK-CHERVONENKIS DIMENSION
265
vergence of the algorithm A in terms of shatterability
measures for given problem.
5.1 Sequence of Shatterability Measures
— General Observations
Consider the sequence of shatterability measures
along growing sample size:
µ
F
(1),µ
F
(2),....
A moment of thought leads to the following observa-
tion.
Lemma 1. The sequence µ
F
(1),µ
F
(2),... is non-
increasing.
Proof. By independence and Fubini’s theorem we
have that:
µ
F
(m+ 1)
=
Z
Z
m+1
[#(l
F
)
|z
1
,...,z
m+1
= 2
m+1
]dP
m+1
(z
1
,... ,z
m+1
)
=
Z
Z
Z
Z
m
[#(l
F
)
|z
1
,...,z
m+1
= 2
m+1
]dP
m
(z
1
,... ,z
m
)dP(z
m+1
)
≤
Z
Z
Z
Z
m
[#(l
F
)
|z
1
,...,z
m
= 2
m
]dP
m
(z
1
,... ,z
m
)dP(z
m+1
)
≤ µ
F
(m)
Z
Z
dP(z
m+1
).
Please note that in the second equality-pass any z
i
can be taken outside the inner integral, not necessarily
z
m+1
, and the rest of the proof is still valid.
A second obvious observation is that µ
F
(m) = 0
for all m > VCdim(F). This follows from the defini-
tion of VC-dimension.
A more interesting fact is that there exist
sets of functions F and distributions P for which
the sequence complies with the following pattern:
(1,... , 1,0,...). It means the sequence consists solely
of starting ones and after some point zeros take place.
Consider e.g. hyperplanes on a plane. Clearly any sin-
gle point or two points can be shattered by a hyper-
plane. Any three points can also be shattered provided
that they do not lie in the same line. This is called
a “general position”, see e.g. (Anthony and Bartlett,
2009, Theorem 3.1), (Wenocur and Dudley, 1981).
But even so, the situation of three points lying in the
same line is of probability measure zero in continuous
spaces. Therefore the sequence for that case would
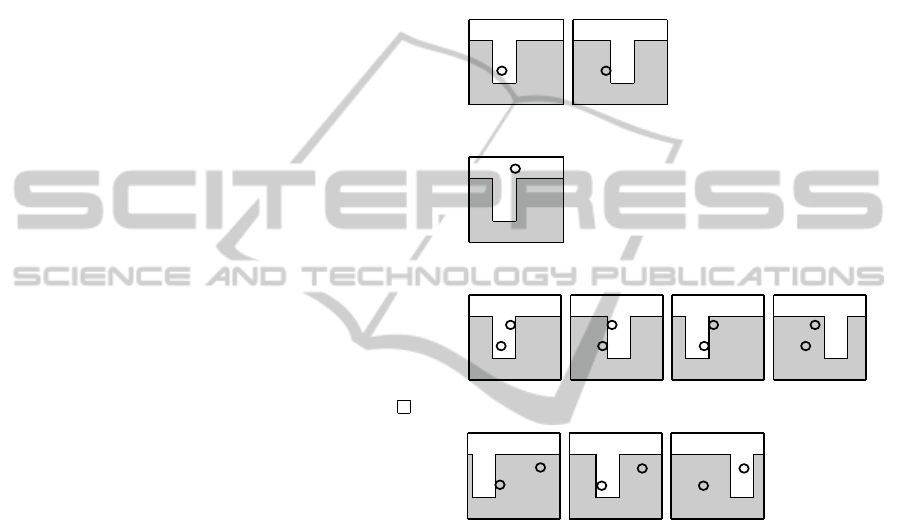
be (1,1,1,0,. . .). On the other hand it is possible to
indicate certain sets F and distributions P for which
the sequence that does not consist solely of ones and
zeros. As an example see the Fig. 3. It illustrates a
set of functions defined over a plane with the decision
boundary in the shape of ‘U’ letter. Suppose ‘U’ is
of fixed width and height and it can be shifted only
along horizontal axes. As the figure shows there exist
samples of size m = 1 (with positive probability mea-
sure) for which only 1 dichotomy is feasible. Also,
there exist such samples (also with positive proba-
bility measure) for which 2 dichotomies are feasible.
The same is true for the case of m = 2. Therefore, the
corresponding shatterability measures must be frac-
tions.
(a) m = 1; all dichotomies feasible
(b) m = 1; not all dichotomies feasible
(c) m = 2; all dichotomies feasible
(d) m = 2; not all dichotomies feasible
Figure 3: Set of functions with horizontally shifting ‘U’-
shaped decision boundary of fixed width. Illustration of
feasibility of all dichotomies for different samples.
From now one, for shortness we will denote the
sequence by µ
1
,µ
2
,....
5.2 Results Distribution and
Convergence for Algorithm A
As one may note, the result of algorithm A being
VCdim
ε,δ
(F) cannot be an overestimation of the true
VCdim(F), but it might be its underestimation. In
this section we analyze how often this underestima-
tion takes place and in effect we derive the probabil-
ity distribution defined over the results to which A can
converge. The analysis is carried out in terms of the
sequence µ
1
,µ
2
,....
Let p(h) denote the probability that A returns
VCdim
ε,δ
(F) = h and let us start by taking a closer
look at small cases. For h = 0 we have
ICAART 2012 - International Conference on Agents and Artificial Intelligence
266

p(0) = (1− µ
1
)
n
, (12)
since it requires that in all n = ⌈− lnδ/(2ε
2
)⌉ inde-
pendent trials the event opposite to feasibility of all
dichotomies occurs (in n times the algorithm B re-
turned 0). For h = 1 we have
p(1) =
1− (1− µ
1
)
n
(1− µ
2
)
n
. (13)
The first factor arises as a complement of p(0) —
the algorithm discovered that for some sample of size
m = 1 all dichotomies were feasible, but it failed to
discover such property for m = 2, hence the second
factor. The cases of h = 2, 3 reveal more of the ex-
pand or divide and conquer approach:
p(2) =
1− (1− µ
1
)
n
1− (1− µ
2
)
n
(1− µ
4
)
n
(1− µ
3
)
n
. (14)
p(3) =
1− (1− µ
1
)
n
1− (1− µ
2
)
n
(1− µ
4
)
n
1− (1− µ
3
)
n
, (15)
After the algorithm failed to discover feasibility of all
dichotomies for m = 4, it had to make a jump back-
wards to check the case of m = 3. We now move to a
bigger case example of h = 21 which illustrates well
forward and backward jumps during the divide phase
in a chronological order (see indices of µ).
p(21) =
1−(1−µ
1
)
n
1−(1−µ
2
)
n
1−(1−µ
4
)
n
1− (1− µ
8
)
n
1− (1− µ
16
)
n
(1− µ
32
)
n
(1− µ
24
)
n
1− (1− µ
20
)
n
(1− µ
22
)
n
1− (1− µ
21
)
n
.
(16)
A careful analysis allows to find a regular formula for
the whole distribution. We state it as the following
theorem.
Theorem 1. Suppose µ
1
,µ
2
,... is the sequence of
shatterability measures for given set of functions
F and distribution P. Let q = ⌊log
2
h⌋ and let
(h
q
,h
q−1
,...,h
0
)
2
denote a binary representation for
each h > 0. Then, the probability distribution of re-
sults to which algorithm A may converge is:
p(0) = (1− µ
1
)
n
,
p(1) =
1− (1− µ
1
)
n
(1− µ
2
)
n
.
p(h) =
q
∏
k=0
1− (1− µ
2
k
)
n
(1− µ
2
q+1
)
n
·
q−1
∏
k=0
h
q−k−1
+ (−1)
h
q−k−1
(1− µ
i(h,k)
)
n
,
(17)
for h ≥ 2, where
i(h,k) =
1
2
(2
q+1
+ 2
q
) +
k
∑
j=1
(−1)
1−h
q− j
· 2
q− j−1
.
(18)
Sketch of proof. Note that during the expand phase
the algorithm performs ⌊log
2
h⌋ + 2 iterations (which
is q+ 2) and this is represented in p(h) by the product
∏
q
k=0
1− (1− µ
2
k
)
n
(1− µ
2
q+1
)
n
. In this product all
but last factors must be of form 1 − (1− µ
2
k
)
n
, since
the algorithm discovered that some sample of size 2
k
can be shattered, whereas the last factor must be of
form (1 − µ
2
q+1
)
n
, since in n trials samples of size
2
q+1
failed to be shattered. In the divide phase the al-
gorithm performs log
2
(2
q+1
− 2
q
) = q iterations, this
is represented by the remaining product. The i(h,k)
function handles suitably successive indices visited
by the algorithm and it is easy to check that these in-
dices are determined by the q− 1 least significant bits
in the binary representation (h
q
,h
q−1
,...,h
0
)
2
. These
bits determine also whether the factor should be of
form (1− µ
i(h,k)
)
n
or 1− (1− µ
i(h,k)
)
n
.
The following statements are direct consequences
of p(h) distribution.
Corollary 1. Suppose that VCdim(F) = h
∗
and sup-
pose the sequence of shatterability measures for given
F and P consists solely of ones and zeros. Then dis-
tribution of results is p(h
∗
) = 1 and p(h) = 0 for all
h 6= h
∗
. Therefore, for any 0 < ε,δ < 1 we have that
A
ε,δ
(F,P) = h
∗
.
This states that the algorithm A always converges
to the true Vapnik-Chervonenkis dimension if the se-
quence of shatterability measures does not contain
fractions.
Corollary 2. Suppose that VCdim(F) = h
∗
and sup-
pose the sequence of shatterability measures contains
fractions. Then the expected result is EA
ε,δ
(F,P) <
h
∗
, where expectation is taken over infinite number of
runs of algorithm A for given problem.
This states that the algorithm A underestimates the
true Vapnik-Chervonenkis dimension if the sequence
of shatterability measures does contain fractions.
5.3 Computational Complexity
It is easy to see that the number of iterations of the
main loop in algorithm A (step 2.) is logarithmic as a
function of the true VCdim(F) = h
∗
. The number of
iterations is at most 2log
2
h
∗
+ 2. Recall that there are
q+ 2 iterations needed by the expand phase and q it-
erations by the divide phase. Unfortunately the most
heavy step is the execution of the algorithm B (step
2.2.2.), since it is an exhaustive check of feasibility of
all dichotomies. Therefore if we consider the compu-
tational complexity as a function of ε,δ,h
∗
then the
pessimistic number of iterations
PROBABILISTIC ESTIMATION OF VAPNIK-CHERVONENKIS DIMENSION
267

∑
visited indices
of µ
i
n2
i
≤ n
2h
∗
∑
i=1
2
i
= O
n(2
h
∗
+1
− 1)
, (19)
which is exponential in h
∗
. This is a consequence of
the fact the B is an exact algorithm.
In the next section we propose a new algorithm
named A
′
. It is very similar to A but uses an auxiliary
algorithm B
′
being a softened probabilistic version of
B. This leads to a constant (at most) complexity of the
step 2.1.2. and in effect logarithmic complexity of the
whole algorithm.
6 ALGORITHM A
′
First, we formulate a probabilistic auxiliary algorithm
B
′
. For a fixed sample z
1
,...,z
m
consider the follow-
ing quantity: η
F
(z
1
,...,z
m
) defined as the probabil-
ity that a random dichotomy drawn from the uniform
distribution (defined over {0, 1}
m
) is feasible by some
function in F on z
1
,...,z
m
:
η
F
(z
1
,...,z
m
) = (20)
2
m
−1
∑
i=0
1
2
m
[∃ f ∈ F realizing dichotomy
(i
m−1
,...,i
0
)
2
on z
1
,...,z
m
], (21)
where (i
m−1
,...,i
0
)
2
is a binary representation of i.
We shall introduce an additional (ε,δ)-precision.
Suppose we would like to have B
′
ε,δ
(F;z
1
,...,z
m
) =
0 if an unfeasible dichotomy occurred, and to have
B
′
ε,δ
(F;z
1
,...,z
m
) = 1 if with probability at least 1−δ
η
F
(z
1
,...,z
m
) ≥ 1− ε (22)
holds true.
The algorithm B
′
is presented in the Fig. 4.
B
′
ε,δ
(F;z
1
,...,z
m
)
1. Repeat N = − lnδ/(2ε
2
) times:
1.1. Draw a random dichotomy (t
1
,...,t
m
) from a
uniform distribution.
1.2. Create a temporary training sample S =
(x
1
,t
1
),...,(x
m
,t
m
) and execute learning algo-
rithm L on it, which yields
b
f.
1.3. If
b
er
S
(
b
f) > 0 return 0.
2. Return 1.
Figure 4: Auxiliary algorithm B
′
.
We now present the algorithm A
′
. Since the inner
auxiliary algorithm was probabilistically softened, the
A
′
ε
1
,δ
1
,ε
2
,δ
2
(F,P)
1. Set m
L
:= 1, m
U
:= ∞, m := m
L
.
2. Repeat while m
U
− m
L
> 1:
2.1. Set s := 0.
2.2. Repeat n = ⌈−lnδ
1
/(2ε
2
1
)⌉ times:
2.2.1 Draw a sample z
1
,...,z
m
from P
m
.
2.2.2 If B
′
ε
2
,δ
2
(F;z
1
,...,z
m
) = 1 then set s := 1 and
jump out of the loop 2.2.
2.3 If m
U
= ∞:
2.3.1 If s = 1 then set m
L
:= 2m, m := m
L
.
2.3.2 Else set m
L
:= 1/2m, m
U
:= m, m := (m
L
+
m
U
)/2.
2.4 Else
2.4.1 If s = 1 then set m
L
:= m, m := (m
L
+ m
U
)/2.
2.4.2 Else set m
U
:= m, m := (m
L
+ m
U
)/2.
3. Return ⌊m
L
⌋.
Figure 5: Algorithm A
′
.
algorithm A
′
requires now four precision parameters
ε
1
,δ
1
,ε
2
,δ
2
, see the Fig. 5.
The result of A
′
is quantity compliant with the fol-
lowing definition (and is an estimation of the true VC-
dimension).
Definition 7. We say that the probabilistic
(ε
1
,δ
1
,ε
2
,δ
2
)-VC-dimension for the set F equals m,
we write
VCdim
ε
1
,δ
1
,ε
2
,δ
2
(F) = m,
if there exists a sample of size z
1
,...,z
m
such that with
probability at least 1− δ
2
η
F
(z
1
,...,z
m
) ≥ 1− ε
2
(23)
and with probability at least 1− δ
1
µ
F
(m+ 1) ≤ ε
1
. (24)
Putting it in simpler wording, the probabilistic
(ε
1
,δ
1
,ε
2
,δ
2
)-VC-dimension is m if we can indicate
a sample of size m for which with high probability
all dichotomies are feasible, and simultaneously with
high probability we cannot indicate such sample of
size m + 1. Obviously, both probability parameters
refer strictly to quantities µ and η, which one should
be aware of. They are related to different probabilistic
spaces. The probability 1 − δ
1
and µ quantities refer
to the probabilistic space with P distribution, whereas
the probability 1 − δ
2
and η quantities refer to the
probabilistic space describing feasibility of random
dichotomies drawn uniformly from {0, 1}
m
for some
fixed sample z
1
,...,z
m
.
Please note that, in contrast to the algorithm A, the
result of A
′
can be (with small probability)both under-
estimation and overestimation of the true VCdim(F).
ICAART 2012 - International Conference on Agents and Artificial Intelligence
268

It is worth remarking that the algorithm B
′
is of
constant complexity O(N) where N = − lnδ
2
/(2ε
2
2
).
Therefore, it is easy to see that the complexity of the
A
′
algorithm is
O
−lnδ
1
2ε
2
1
−lnδ
2
2ε
2
2
log
2
h
∗
. (25)
6.1 Notes on Distribution of Results for
Algorithm A
′
Having in mind the theorem 1 which describes the
probability distribution p(h) of results to which the
algorithm A may converge, we can try to do a sim-
ilar analysis for the A
′
algorithm. The main differ-
ence now is that A
′
can overestimate the true VC-
dimension. This happens when for some sample
drawn in the step 2.2.1. some dichotomies are not fea-
sible, but B
′
fails to discover it in its N trials. In other
words, apart from quantities µ
F
(m) the involvement
of η
F
(z
1
,...,z
m
) must be taken into account.
Consider the following expectation
α
m
=
Z
Z
m
[#(l
F
)
|z
1
,...,z
m
= 2
m
]
+ [#(l
F
)
|z
1
,...,z
m
< 2
m
]η
F
(z
1
,...,z
m
)
N
dP
m
(z
1
,...,z
m
)
= µ
F
(m)
+
Z
Z
m
[#(l
F
)
|z
1
,...,z
m
< 2
m
]η
F
(z
1
,...,z
m
)
N
dP
m
(z
1
,...,z
m
). (26)
It describes (in an average case) the probability of an
event of interest, i.e. : that either a randomly drawn
sample of size m can be shattered (first summand) or
it cannot be shattered, but this fact was not discovered
in N trials (second summand). Therefore, to explicitly
write down the theoretical probability distribution for
results of A
′
it is sufficient to insert into (17) quantities
α
i
in the place of µ
i
.
7 SUMMARY AND FUTURE
RESEARCH
In the paper we propose a general idea for probabilis-
tic estimation of the VC-dimension for an arbitrary
set of indicator functions. The idea required suitable
definitions of several notions and quantities which can
be regarded as probabilistic counterparts of some tra-
ditional notions defined by Vapnik.
The main idea is based on an approach we call
expand or divide and conquer and is represented
by two algorithms A and A
′
that we propose. The
analysis of computational complexity shows that A
′
requires only logarithmic time with respect to the
true VC-dimension it tries to discover. This time
scales also with imposed precision parameters: n =
−lnδ
1
/(2ε
1
)
2
, N = − lnδ
2
/(2ε
2
)
2
, and their scaling
influence on the time is O(n· N).
We are aware that the presented part of research
constitutes only the theoretical part. Certainly, practi-
cal applications of the idea may still require a thor-
ough experimental research first, possibly some re-
finements in algorithms, in order to be successful.
In the future, we plan to carry out the following
experimentally-oriented studies on the idea:
1. executions of A and A
′
on sets of functions with
simple geometrical bases (hyperplanes, spheres,
rectangles etc.),
2. tests for linear combinations of bases,
3. tests for sets of functions with regularization,
4. tests on convergence and performance,
5. registering histograms of experimental distribu-
tions of results to see how heavy are the tails
(i.e. how often under/overestimations of the true
VC-dimension occur),
6. discovering ‘good’ settings for precision parame-
ters for given conditions of experiment,
7. tests for sets of functions for which the true VC-
dimension is unknown.
Results of these studies ought to form a separate pub-
lication.
ACKNOWLEDGEMENTS
This work has been financed by the Polish Govern-
ment, Ministry of Science and Higher Education from
the sources for science within years 2010–2012. Re-
search project no.: N N516 424938.
REFERENCES
Anthony, M. and Bartlett, P. (2009). Neural Network Learn-
ing: Theoretical Foundations. Cambridge University
Press, Cambridge, UK.
Bartlett, P., Kulkarni, S., and Posner, S. (1997). Covering
numbers for real-valued function classes. IEEE Trans-
actions on Information Theory, 47:1721–1724.
Cherkassky, V. and Mulier, F. (1998). Learning from data.
John Wiley & Sons, inc.
PROBABILISTIC ESTIMATION OF VAPNIK-CHERVONENKIS DIMENSION
269

Graham, R., Knuth, D., and Patashik, O. (2002). Con-
crete Mathematics. A foundation for Computer Sci-
ence. Wydawnictwo Naukowe PWN SA, Warsaw,
Poland.
Hellman, M. and Raviv, J. (1970). Probability of error,
equivocation and the chernoff bound. IEEE Transac-
tions on Information Theory, IT-16(4):368–372.
Papadimitriou, C. and Yannakakis, M. (1996). On limited
nondeterminism and the complexity of the V-C di-
mension. Journal of Computer and System Sciences,
53:161–170.
Schmidt, J., Siegel, A., and Srinivasan, A. (1995).
Chernoff-hoeffding bounds for applications with lim-
ited independence. SIAM Journal on Discrete Mathe-
matics, 8(2):223–250.
Vapnik, V. (1995). The Nature of Statistical Learning The-
ory. Springer Verlag, New York.
Vapnik, V. (1998). Statistical Learning Theory: Inference
from Small Samples. Wiley, New York.
Vapnik, V. and Chervonenkis, A. (1968). On the uniform
convergence of relative frequencies of events to their
probabilities. Dokl. Aka. Nauk, 181.
Vapnik, V. and Chervonenkis, A. (1989). The necessary
and sufficient conditions for the consistency of the
method of empirical risk minimization. Yearbook of
the Academy of Sciences of the USSR on Recognition,
Classification and Forecasting, 2:217–249.
Wenocur, R. and Dudley, R. (1981). Some special Vapnik-
Chervonenkis classes. Discrete Mathematics, 33:313–
318.
Zhang, T. (2002). Covering number bounds of certain reg-
ularized linear function classes. Journal of Machine
Learning Research, 2:527–550.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
270
