
ENVIRONMENT UPDATING AND AGENT SCHEDULING POLICIES
IN AGENT-BASED SIMULATORS
Philippe Mathieu and Yann Secq
Universit´e Lille 1, LIFL UMR CNRS 8022, Villeneuve d’Ascq, Lille, France
Keywords:
Agent-based simulation, Agent scheduling, Simultaneity, Simulation bias, Parameter sensibility.
Abstract:
Since Schelling’s segregation model, the ability to represent individual behaviours and to execute them to
produce emergent collective behaviour has enabled interesting studies in diverse domains, like artificial finan-
cial markets, crowd simulation or biological simulations. Nevertheless, the description of such experiments
are focused on the agents behaviours, and seldom clarify the exact process used to execute the simulation.
In other words, little details are known on the assumptions, the choices and the design that have been done
on the simulator on fundamental notions like time, simultaneity, agent scheduling or sequential/parallel exe-
cution. Though, these choices are crucial because they impact simulation results. This paper is focused on
parameter sensitivity of agent-based simulators implementations, specifically on environment updating and
agent scheduling policies. We highlight concepts that simulator designers have to define and presents several
possible implementations and their impact.
1 INTRODUCTION
When buildinga simulation infrastructure, several cri-
teria have to be taken into account by the simulator
designer. (Arunachalam et al., 2008) defines criteria
to compare some existing agent-based simulators: de-
sign (environment complexity, environment distribu-
tion, agent/environment coupling), model execution
(quality and nature of visualisation and ease of dy-
namical properties evolution at runtime), model spec-
ification (expected levelof programmingskills and ef-
fort needed to create a given toy example) and docu-
mentation (quality and effectiveness). These criteria
are mainly concerned by the user point of view, stress-
ing the flexibility and richness of models that can be
expressed, but also involve some aspects linked to the
implementation of the proposed multi-agent models
(specification and execution).
In this paper, we want to stress the importance
of design and implementation choices that are made
by simulator designers. To do so, we define a set of
problematics that have to be answered by simulator
designers. These problematics can be crucial or irrel-
evant depending on the application domain. If these
problematics are not properly taken into account, it
can lead to biased results. It is thus critical to clearly
state these design and implementation choices, in or-
der to ease reproducibility and trust in produced re-
sults. We stress the fact that this paper is focused on
simulators parameter sensitivity and not on domain
parameter sensitivity.
In section 2, we define criteria in order to provide
a structured set of questions to characterize agent-
based simulators models and implementations. We
believe that simulator designers should take into ac-
count these questions before making their implemen-
tation choices. Section 3 characterizes impacts of
agents scheduling and environment updating policies
on three application domains.
2 AGENT-BASED SIMULATORS
PROBLEMATICS
When building an agent-based simulator, there is a
large set of problematics that have to be taken into
account: time and duration notion, simultaneity han-
dling, agents equity, spatial/non spatial environment,
determinism and reproducibility and scalability is-
sues. Even if not all these aspects are pertinent for
each application domains, simulator designers should
have them in mind before making implementation
choices that can deeply impact their conceptual and
technical models. To provide some guidelines of
the choices that can be made for a given simulation
170
Mathieu P. and Secq Y..
ENVIRONMENT UPDATING AND AGENT SCHEDULING POLICIES IN AGENT-BASED SIMULATORS.
DOI: 10.5220/0003732301700175
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 170-175
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

model, we believe that designers should at least an-
swer precisely these questions:
• Does your model need simultaneity ?
• Do you have a spatial environment or not ?
• Do you need to guarantee equity in talk, in infor-
mation or in resources ?
• Does your agents need to perceive a lot of infor-
mation in order to decide ?
• Does your agents have small or high resource us-
age (memory and/or computation) ?
• Do you have a “human in the loop” ?
• Do you have an open or closed simulator ?
Providing a clear diagram detailing the relation
between these problematics could be interesting, but
as they are interleaved and because they are also im-
pacted by the application domain, we believe that it
is not possible to define a clear taxonomy. Thus, fol-
lowing sections will only focus on policies that can be
used in order to update the environment and to sched-
ule agents.
To illustrate the importance of environment up-
dating scheme and agent scheduling mechanism, we
study their impact on three well known models (Table
1): prey-predator, Game Of Life and artificial stock
market. In these models, the system is composed of
active entities that evolve to compute some function.
In prey-predator, only one cell is evaluated within a
time-step, in cellular automata all cells evolve simul-
taneously and in an artificial stock market traders act
concurrently. If these properties are changed, then
these models do not exhibit the same behaviour and
loose their emergent properties. We make the as-
sumption that everything is an agent (Kubera et al.,
2010) but adding an explicit environment update as a
last stage in the simulation loop could enable an ap-
proach mixing agents and objects.
3 ENVIRONMENT UPDATING
AND AGENT SCHEDULING
This section purpose is to define the main aspects
that an agent-based simulator designer should have
in mind before developing its own tool (Macal and
North, 2007). We first introduce the main schema
of agent-based simulators before diving into environ-
ment updating policies and agent scheduling com-
plexities.
3.1 A Classical Agent-based Simulation
Loop
• First, environment and agents have to be defined,
• then, during the simulation, the simulator has to:
– mix agents to determine in which order agents
will be queried to retrieve their chosen action.
The agents list is often shuffled but it can also
be sorted to give priorities to specific agent
classes,
– choose agents to decide which agents will be
able to act at this time-step (useful if some
agents have to wait or to enable action durations
spanning on more than one time-step),
– query agents to retrieve their action,
– execute actions and update environment,
some conflicts can appear, in such case the de-
signer has to define a tie-break rule,
– update agent population, ie. removing or cre-
ating agents if necessary,
– finally update probes so observations can be
made on the environment or agents in order to
analyze some representative criteria.
These basic steps enable the definition of a large range
evaluation scheme: with evolving population or not,
with random or specific agent querying ordering, with
synchronous or asynchronous environment update.
3.2 Environment Updating Policies and
Agent Perception
Agents act on the environment, thus environment up-
dating scheme linked with agent scheduling policy,
are important in order to guarantee that agents have
equal access to the same environment state (equity
in information). The two main environment handling
schemes are synchronousand asynchronousupdating.
On one hand, with synchronous updating scheme, all
modifications are done simultaneously. This mech-
anism is generally implemented by relying on the
availability of another environment representing the
next generation. This approach enables agents to ac-
cess the same information (by looking at the current
environment) and allows to switch between current
and next environment in order to give the illusion of
simultaneous update of the whole environment. On
the other hand, with asynchronous update scheme,
there is only one environment and modifications are
done directly. This means that during a time-step, ele-
ments from different time-steps are mixed, which can
break the equity in information. Indeed, the first agent
only handle information from the current time-step
ENVIRONMENT UPDATING AND AGENT SCHEDULING POLICIES IN AGENT-BASED SIMULATORS
171
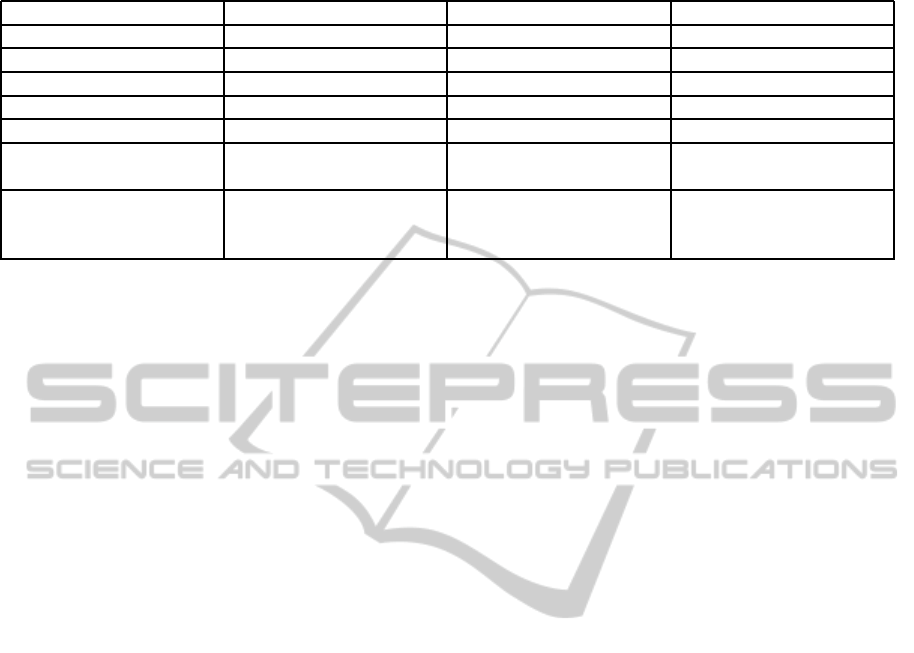
Table 1: Three well-known agent-based models: Prey-predator, Game of Life and Artificial Stock Market.
Prey-predator Game of Life Stock Market
Environment 2D Grid or continuous 2D Grid Non spatial
Agents Grass / Sheep / Wolf Cell Trader
Human in the loop No No Yes
Simultaneity None Yes None
Agent per timestep 1 all cells N
Emergence Lotka-Voltera graph of
population evolution
stable, growing or cyclic
patterns
stylised facts
Equity in talk Yes or No Yes Yes
Equity in information No Yes Yes/No
Equity in resources No Yes No
while the last one to act can perceive modifications
that have been done by previous agents.
Environment updating is also deeply linked with
agents perceptionhandling. The two main approaches
are pushing or pulling information. In the pushing
scheme, information is automatically given by the en-
vironment to the agent, while in the pulling scheme,
it is the agent that initiate the request to access some
information within the environment. It is important to
distinguish these two schemes because if a simulator
rely on a pushing scheme, it can ensure information
equity by pushing information to agents at the begin-
ning of the time-step and after query agents for their
action. If a pulling mechanism is used, agents can re-
quest information to the environment while modifica-
tions have already been done during the current time-
step. Thus, it becomes harder to maintain information
equity in a pulling scheme with an asynchronous en-
vironment updating mecanism.
Table 1 presents the differences of the three mod-
els concerning these problematics of environment up-
dating and notification scheme. In prey-predator,
there are several agent families with different proper-
ties and behaviours: the grass just grows, sheeps and
wolves can eat, move and reproduce themselves. In
the Game of Life (or GoL), there is only one kind of
agent, a cell with only two states: dead or alive. In
artificial stock markets, there are several traders fam-
ilies which define different trading strategies. There
is no simultaneity in prey-predator: a time-step is re-
duced to one agent action. This is in fact to prevent a
sheep and a wolf to act simultaneously and to have a
wolf trying to eat a sheep but being unable to catch it.
On the opposite, in GoL, cells evolution rely on the
crowding in their close neighbourhood. Thus, each
cell compute how many alive cells surround her and
all cells switch their state simultaneously. If simul-
taneity is not properly handled, emergent patterns do
not appear. Finally, in artificial stock markets, equity
in talk is enforced but there is no simultaneity in the
model: as soon as an order can match another, a new
price is fixed. Nevertheless, this do not mean that no-
tification is done immediately. To enforce informa-
tion equity, notification occurs only at the end of a
time-step, or if agents use a pulling scheme and price
history is kept, it is possible to ensure that the agent
access the previous fixed price and not the one pro-
duced during this time-step.
3.3 Agent Scheduling Policies
The Table 2 express two dimensions useful to de-
scribe precisely agent scheduling policies: agent log-
ical scheduling and underlying sequential or paral-
lel execution. We believe that simulator designer
should describe precisely how they implement their
simulation engine in order for the simulation designer
to know exactly which bias could be observed. An
experimentation to reproduce the Sugarscape model
(Epstein and Axtell, 1996) with the MASON simula-
tor insists also on the importance of action scheduling
(Bigbee et al., 2005).
Indeed, one aspect is to know how agents will be
able to act at each time-step, in sequential or in par-
allel, and how the simulation engine will indeed give
the computational resources to agents. To understand
the differences and implications of these choices, we
have to detail the different cases.
3.4 Purely Sequential and Fair
Controlled scheduling with one process is concerned
with a round-robin agent scheduling to retrieve their
actions and a sequential execution of these actions.
This approach is often used in simulators as it is easy
to understand and implement. Nevertheless, the sim-
ulator designer has to make a choice between two ac-
tion execution schemes: a direct execution of agents
actions or a deferred one. The first scheme allows
agents that are last in the round to take into account
ICAART 2012 - International Conference on Agents and Artificial Intelligence
172
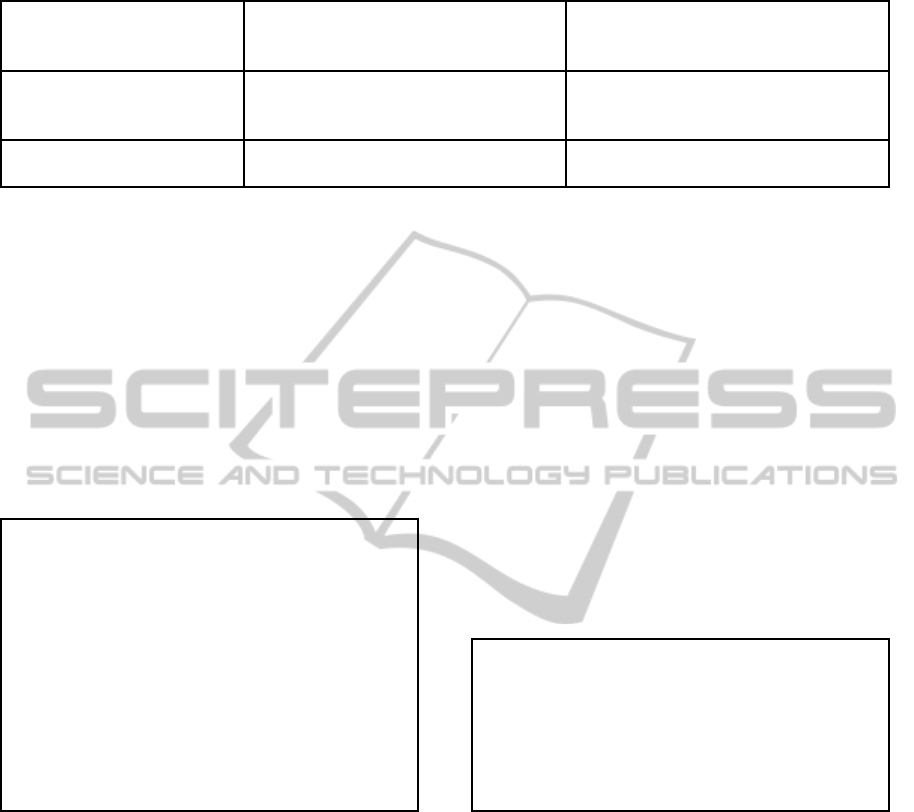
Table 2: Agent logical scheduling and physical execution context.
Controlled scheduling
Explicit agent handling by the simu-
lation engine
Undefined scheduling
Delegated to the language or operat-
ing system
Only 1 process
all sequential
Simulated simultaneity possible
(influence/reaction)
Fair access to info
no simultaneity
N physical processes
real execution simultaneity
increase execution time for agents real time reasoning
what others agents have done (and thus break infor-
mation equity), while the second scheme ensure that
the information available to all agents is the same.
This approach is fair as each agent has the oppor-
tunity to act at each time-step. It can lead to some
distortion in equity if the simulator designer do not
distinguish action gathering from action execution.
The figure 1 illustrates a classic implementation. The
main restriction of this approach is a loss of perfor-
mance while running on parallel hardware because
agents reasoning and the main simulation loop are
purely sequential.
Environment env = c r eat e A nd Ini t ( ) ;
Li s t<Agent> agent s = c r eat e AndI n i t ( ) ;
Li s t<Action > a c t i o n s = i n i t ( ) ;
while ! si mul a t ionF ini s h ed ( ) {
Li s t <Agent> ac t iveA gen ts =
choose ( mix ( agen ts ) ) ;
ac t i o n s . c l e a r ( ) ;
for ( Agent agent : active Age nts ) {
a c t io n s . add ( agent . act ( ) ) ;
}
env . apply ( ac t i on s ) ;
upda tePopula ti o n ( agent s ) ;
updateProbes ( environment , agent s ) ;
}
Figure 1: A purely sequential and fair classical implemen-
tation.
Prey-predator. To handle correctly simultaneity
in this model, the time-step has to be reduced to only
one agent selection. Equity in talk can be guaran-
teed through the agent selection policy (ie. choose
primitive). Game of Life: information equity has to
be enforced in order to provide simultaneity between
all cells. It can be done by separating the percep-
tion stage from the cell state evolution. One approach
consists in gathering all cells actions before apply-
ing them, or through a costly environment duplica-
tion (one handling the current time-step for percep-
tion and the other one for the next time-step to store
new cells states). Stock Market: if information equity
is required, an approach similar to the GoL has to be
implemented. Otherwise, the only important aspect is
to shuffle agents at each time-step, unless the designer
want to enforce a priority in talk, for example to sim-
ulate the fact that some traders are inside the market,
while others are remote.
3.5 Purely Sequential and Unfair
With undefined scheduling and one process, all ac-
tions are evaluated sequentially but there is no guar-
antee that each agent will talk the same number of
time during a simulation. In fact, the timestep is re-
duced to querying and executing only one agent cho-
sen randomly (or with a specific strategy that can take
into account talk equity between agents). In this ap-
proach, simultaneity is impossible because only one
agent act within a timestep. The figure illustrate a
classic implementation.
Environment env = c r eat e AndI n i t ( ) ;
Li s t <Agent> ag ent s = cr eat e A ndI n i t ( ) ;
while ! si mul a t ionF ini s h ed ( ) {
Agent c u r r e n t = choose ( agents ) ;
env . apply ( cu r r e n t . ac t ( ) ) ;
upda tePopula ti o n ( agent s ) ;
updateProbes ( environment , a gen ts ) ;
}
Figure 2: A purely sequential and unfair classical imple-
mentation.
Prey-predator. This approach is particularly
suited for the prey-predator model. It is simpler to
implement that the first cell because no simultaneity
is required in this specific simulation. Game of Life:
this approach is not suitable because of the manda-
tory simultaneity of the model. If this scheme is used,
cells do not evolvesimultaneously and thus cells from
different time-steps are mixed, leading to a mismatch
with rules model. With this constraints, classical pat-
terns of the Game of Life cannot be reproduced. Stock
Market: if equity in talk is not needed, like for prey-
predator, this approach is easier to implement. But
if equity in talk is required, it implies that the de-
signer has to implement a policy enforcing that agent
selection for each time-step check that no agent can
ENVIRONMENT UPDATING AND AGENT SCHEDULING POLICIES IN AGENT-BASED SIMULATORS
173

be more than one time-step in future than the others.
3.6 Parallel and Fair
Controlled scheduling with multiple processes en-
sures fairness by constraining agents actions through
an explicit synchronisation at each time-step. But,
as several (physical) processes are available, perfor-
mances are generally increased because computations
implied by agents reasoning can now be executed in
parallel. In this implementation, the main simulation
loop is restricted to a simple synchronisation barrier
that waits after all agents actions. The choice made on
straight or deferred action execution implies the same
consequences as in the case of controlled scheduling
with one process.
With the advent of multi-core architecture, this ap-
proach can leverage the raw computing power avail-
able in current hardware infrastructure. Nevertheless,
creation and switching process costs have to be mea-
sured and balanced with behaviours evaluation costs
in order to really obtain interesting speedup. In case
of multi-core CPU, this approach do not imply im-
portant code refactoring, but if the execution target
is a GPU, the translation is not easy. If special care
is taken on agent’s reasoning to simplify it as a fi-
nite state automata, this approach can scale on GPU
infrastructure as demonstrated by the FLAME-GPU
framework (Richmond Paul, 2009).
The figure 3 illustrates a classical implementation
where each agent has its own thread and where a syn-
chronisation barrier is used to guarantee equity in talk.
Thus, in each loop, all agents are waken and have to
proactively store their action in a shared resource.
Environment env = c r ea t e A ndI n i t ( ) ;
List <Agent> a g ent s = cr e a t eA n d I ni t ( ) ;
List <Action> a c t i o n s = i n i t ( ) ;
/ / Launching a l l agents th r ead s
for ( Agent agent : c u r r e n t ){
new Thread ( agent ) . s t a r t ( ) ;
}
while ! si m u la t i o nF i n i she d ( ) {
List <Agent> acti veAg ents = mix ( agent s ) ;
List <Agent> c u r r e n t =
choose ( a ctiv eAge nts ) ;
wa itA l lAg e nts A cti on s ( ac tiv e Age n ts ) ;
env . apply ( act i o n s ) ;
up dat e Pop u lat i on ( age nts ) ;
updateProbes ( environment , age n ts ) ;
}
Figure 3: A parallel and fair classical implementation.
Prey-predator. As this model do not need simul-
taneity, special care should be taken to avoid that two
agents of the same neighbourhood act in parallel. It
could lead to some artefacts like a wolf trying to eat
a sheep that is no more present at execution because
it has simultaneously moved. This problem can be
easily solved by decoupling action gathering from ac-
tion execution and by giving priorities to wolves over
sheep. Game of Life: as with prey-predator, it is nec-
essary to defer action execution otherwise cells from
different time-step are mixed. Speedup should not
be so interesting in this specific model because cells
computation are not costly. Unless a specific imple-
mentation under a GPU with an environment com-
pletely embedded within GPU memory (Perumalla
and Aaby, 2008) is used, sequential versions should
be faster than a parallel one. Stock Market: in con-
trary to prey-predator, as no simultaneity is possible
in this model, there are no issue if two agents act si-
multaneously as there will always have an order that
arrive before another within an order book. But the
fact that traders can run in parallel imply that some
gain could be observed for costly trading behaviours.
Nevertheless, processes synchronisation costs reduce
the gain that could be obtain with the last approach.
3.7 Parallel and Unfair
Finally, uncontrolled scheduling and multiple pro-
cesses can be seen as a special kind of individual-
based simulators where focus is put on real-time sim-
ulation. As no scheduling is done on agents and
actions can occur simultaneously, this approach is
adapted to real-time interactive simulations. Illustra-
tions of this special kind of simulations are mainly
related to Massively Multi-player Online Role Play-
ing Game (MMORPG) or serious games (pedagogi-
cal games). This level of parallelism enable scaling
in agents number and in response time. It should be
noted that in such settings, questions of reproducibil-
ity or fairness are no more pertinent. This context
should mainly be used to enable human-in-the-loop
simulations in a real-time setting, which is the case in
games and serious games. Equity in talk has another
meaning here, and virtual agents should be slow down
in order to enable humans to react in the same timing
as virtual agents.
Prey-predator: in this setting, the only problem
that can occur is simultaneous modification of ad-
jacent agents. It could be solved by some locking
mechanism to ensure that simultaneity cannot occur
in these situations. Game of Life: again, in this con-
text, the model cannot be guaranteed unless strong
synchronisation and deferred action execution is en-
forced. Such move would reduce any gains that could
ICAART 2012 - International Conference on Agents and Artificial Intelligence
174

Environment env = c r eat e A nd Ini t ( ) ;
Li s t<Agent> a gents = c r eat e A ndI n i t ( ) ;
Li s t<Action > a c t i o n s = i n i t ( ) ;
/ / Launching a l l agent s thr eads
for ( Agent agent : a gents ){
new Thread ( agent ) . s t a r t ( ) ;
}
/ / Main si m ula t i on loop
while ! si mul a t ionF ini s h ed ( ) {
Li s t <Agent> ac t i v e = choose ( agents ) ;
env . apply ( next ( acti ve , a c t i o n s ) ) ;
upda tePopula ti o n ( agent s ) ;
updateProbes ( environment , agent s ) ;
}
Figure 4: A parallel and unfair classical implementation.
be obtain from parallel action execution. Stock Mar-
ket: this approach is clearly fitted to artificial stock
market simulation, particularly in serious games con-
text where human agents interact with virtual agents.
The main issue is then to slow down virtual agents so
humans can react in the same timing.
4 CONCLUSIONS
Agent-based simulator designers should take into ac-
count multiple notions: time and simultaneity, the
multiple notions of equity (in talk/information/re-
sources) between agents, the environmentnature, cen-
tralised or distributed, batch or interactive execution,
reproducibility and scalability issues. In this pa-
per, we focused our study on parameter sensitivity of
agent-based simulators to highlight the impact of de-
sign choices made by simulator builders.
We have restrained our study on agent scheduling
and environment updating. To do so, we have pro-
posed in section 2 two criteria that help to divide con-
ceptual and implementations choices in four distinct
approaches: purely sequential and fair, purely sequen-
tial and unfair, parallel and fair, and real-time. We
have shown the advantages and problems that are im-
plied by these conceptual and implementation related
choices and we have presented some guidelines that
should help simulator designers to choose the right
approach for the right simulation model.
The question we are left with is “Is-it possible to
define an universal simulator ?”, that could be con-
figured and customised in order to allow the whole
range of approaches. The heterogeneity of simulation
models requirements and also the diversity of techno-
logical choices, let us think that it is improbable that
such a tool will appear.
Future works will be focused on the formalisa-
tion of these notions of equity and simultaneity in
order to provide a conceptual framework to charac-
terise more precisely simulation models and their im-
plementations.
REFERENCES
Arunachalam, S., Zalila-Wenkstern, R., and Steiner, R.
(2008). Environment mediated multi agent simula-
tion tools; a comparison. In Self-Adaptive and Self-
Organizing Systems Workshops, 2008. SASOW 2008.
Second IEEE International Conference on, pages 43
–48.
Bigbee, A., Cioffi-Revilla, C., and Luke, S. (2005). Repli-
cation of sugarscape using mason. In 4th International
Workshop on Agent-based Approaches in Economic
and Social Complex Systems (AESCS 2005).
Epstein, J. M. and Axtell, R. L. (1996). Growing Artificial
Societies: Social Science from the Bottom Up (Com-
plex Adaptive Systems). The MIT Press, 1st printing
edition.
Kubera, Y., Mathieu, P., and Picault, S. (2010). Everything
can be agent! In van der Hoek, W., Kaminka, G.,
Lesp´erance, Y., Luck, M., and Sen, S., editors, Pro-
ceedings of the ninth International Joint Conference
on Autonomous Agents and Multi-Agent Systems (AA-
MAS’2010), pages 1547–1548. International Founda-
tion for Autonomous Agents and Multiagent Systems.
Macal, C. M. and North, M. J. (2007). Agent-based model-
ing and simulation: desktop abms. In Proceedings of
the 39th conference on Winter simulation: 40 years!
The best is yet to come, WSC ’07, pages 95–106, Pis-
cataway, NJ, USA. IEEE Press.
Perumalla, K. S. and Aaby, B. G. (2008). Data paral-
lel execution challenges and runtime performance of
agent simulations on gpus. In Proceedings of the
2008 Spring simulation multiconference, SpringSim
’08, pages 116–123, San Diego, CA, USA. Society
for Computer Simulation International.
Richmond Paul, Coakley Simon, R. D. (2009). Cellular
level agent based modelling on the graphics process-
ing unit. In High Performance Computational Systems
Biology, Trento, Italy.
ENVIRONMENT UPDATING AND AGENT SCHEDULING POLICIES IN AGENT-BASED SIMULATORS
175
