
DETECTION OF LANE DEPARTURE ON HIGH-SPEED ROADS
David Hanwell and Majid Mirmehdi
University of Bristol, Bristol, U.K.
Keywords:
Lane departure, Lane tracking, Vanishing point.
Abstract:
We present a system for detecting and tracking the lanes of high-speed roads, in order to warn the driver of
accidental lane departures. The proposed method introduces a novel variant of the classic Hough transform,
better equipped to detect and locate linear road markings with a common vanishing point. This is combined
with a simple model of the lane and an Extended Kalman Filter to make detection and tracking more robust.
This allows detection of lane changes, resistant to visual interference by traffic and irrelevant road markings.
1 INTRODUCTION
Studies have shown that many accidents are caused
by drivers falling asleep (Horne and Reyner, 1995),
especially during long journeys on high speed roads.
In such cases, mortality rates tend to be higher as
the driver is not sufficiently alert to brake or steer
to avoid obstacles (NCSDR/NHTSA Expert Panel on
Driver Fatigue and Sleepiness, 1998). Even when
wide awake, a driver’s inattentiveness can cause ac-
cidents, e.g. due to failure to check for other vehicles
in blind spots when changing lanes. Recently, some
vehicle manufacturershavebegun to incorporate cam-
eras into their cars, for example to provide a more fa-
vorable rear-view when reversing. Using these to pro-
duce a lane departure warning system (LDWS) could
help reduce both the number and severity of accidents
(Rimini-Doering et al., 2005).
For its use to become widespread, a LDWS should
be as cheap and simple to install as possible, requiring
minimal additional hardware. Much of the previous
work in lane detection and tracking looks at the more
involved problem of autonomous driving, requiring
extra hardware for a more elaborate approach to lane
departure detection, e.g. many use multiple cameras
(Loose and Franke, 2010; Lipski et al., 2008).
Accidental lane departures are most common, and
most dangerous,on high speed roads. Such roads tend
to have low curvature, appearing almost straight, es-
pecially from our camera’s viewpoint, mounted on the
front bumper significantly below driver eye view (see
Fig. 5(a) for an example). We exploit this fact to sim-
plify both the detection and modelling of lane mark-
ings and present a system which uses only a single
camera, and requires no more computational power
than provided by a standard PC. The data is obtained
from an experimental vehicle by Jaguar Land Rover.
In order for a LDWS to be effective, it must be
resilient to visual clutter. Specifically, it should (a)
detect only those image features which correspond to
road markings, i.e. ignore road barriers, or other traf-
fic, (b) ignore irrelevant road markings, i.e. writing
on road surfaces or road markings not parallel to the
vehicle’s lane, and (c) be able to detect and track not
only those markings delimiting the vehicle’s immedi-
ate lane, but also adjacent lanes to allow tracking to
be uninterrupted during, and after, a lane change.
For each of the above criteria, one can find exam-
ples of its use in previous work, but no single piece of
work incorporates all three into a single camera sys-
tem. In the case of the 1
st
for example, (Wu et al.,
2009) describes a system which exploited the con-
trast of road markings against their background. They
used transitions in image intensity, with a statistical
search algorithm, to find road markings. Most others
however, simply sought strong edge lines (McDon-
ald, 2001; Voisin et al., 2005; Jung and Kelber, 2005).
While road markings do tend to have strong edges, not
all strong edges correspond to road markings, and so
it can be prone to interference, e.g. from other traffic.
Approaches to the 2
nd
criteria usually involve tak-
ing into account the expected position and orienta-
tion of road markings. For example in (McDonald,
2001), the vanishing point (VP) of the road markings
was presumed to lie in a fixed rectangular region of
the image. A Hough transform (HT) was applied to
this rectangle, and the accumulator binarised, giving
a map of the points in the Hough space that represent
lines which pass through the rectangular region. This
was then used as a mask for the accumulator during
529
Hanwell D. and Mirmehdi M. (2012).
DETECTION OF LANE DEPARTURE ON HIGH-SPEED ROADS.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 529-536
DOI: 10.5220/0003732605290536
Copyright
c
SciTePress

Figure 1: An overview of the system.
the detection of lane edge lines, thus filtering out any
detected edges unlikely to belong to road lane mark-
ings. In (Jung and Kelber, 2005), a histogram of edge
pixel directions was used in a weighted HT to extract
the edge lines in the most common directions. The
authors state this worked well but could be prone to
interference from other ‘significant structures’ in the
image, or from vehicles close in front.
Of the three criteria, the 3
rd
is perhaps the least
common, with most previous work concentrating on
tracking only two (Voisin et al., 2005; Wu et al., 2009;
Jung and Kelber, 2005) or three (McDonald, 2001;
D’Cruz and Jia Zou, 2007) road markings. One no-
table exception is (Ieng et al., 2005), in which arbitrar-
ily many road markings were simultaneously tracked,
each with a separate Kalman filter (KF). However, the
width of each lane was not taken into account, and
multiple cameras were required.
While many of the above showgood results in lane
tracking, none take into account all three criteria, and
so are not ideally suited to LDWS. We propose a sim-
ple LDWS method that detects and tracks the lanes
of high speed roads, and addresses all three crite-
ria. We demonstrate insensitivity to both nearby traf-
fic and irrelevant road markings. Our method begins
with a novel variant of the classic HT which is bet-
ter equipped to detect and locate linear road markings
with a common VP (Section 4). It uses knowledge
of the VP location to detect only those road markings
parallel to the lane. Also, it takes advantage of the
distinctive appearance of linear road markings, to dis-
tinguish them from other lines parallel to the lane, e.g.
edges of vehicles or road barriers. This is combined
with an Extended Kalman Filter (EKF) to detect (Sec-
tion 4.1) and track (Section 4.2) arbitrarily many road
markings which are then used to estimate the VP lo-
cation by an MSE minimisation method (Section 5).
The VP is tracked between frames using a KF, and
used by the HT to allow it to ignore edge lines not
parallel to the lane. Its y-coordinate is used to define
the ROI, allowing us to ignore objects above the hori-
zon. A system overview is shown in Fig. 1. Section 6
presents our results, and demonstrates the robustness
of our system on both straight and curved sections
of high-speed roads, and its robustness to occlusions.
The paper is concluded in Section 7.
2 CAMERA-VEHICLE SET-UP
Footage was taken using a colour video camera
mounted on the front bumper of the vehicle, 58cm
above the ground. The camera has a horizontal field
of view of 157°, resulting in severe fish-eye distor-
tion, making a correction necessary. The result is an
anti-aliased, greyscale image, conforming to a recti-
linear projection. Mounted so low, the camera gives a
different view from that usually seen by a driver (see
Fig. 5(a)). It points forward, so that the horizon is ap-
proximately halfway up the image, allowing us to ig-
nore the upper part of the image once the VP is found.
Also, because the camera is mounted so low down,
more distant road is contained within a much smaller
area of image than nearer road, making more distant
road markings difficult to distinguish. However, the
low camera position causes road markings in the im-
age to be less affected by the road’s curvature, allow-
ing the system to function well even on curves. The
choice of lens and camera position was not ours, but
that of the vehicle manufacturer. The camera is one
of six fitted to this model of vehicle, serving a variety
of purposes including reversing and parking aids.
3 THE ROAD MARKING MODEL
In order to determine whether the vehicle has crossed
a lane boundary, we must model the relationship be-
tween lines in the ground plane, and their correspond-
ing lines in the image. This relationship is used to
facilitate the detection and tracking of road markings.
We use a standard pinhole camera model, with viewer
axes X, Y, and Z, whose origin is the focal point. Our
image plane has axes x and y, which lie parallel to the
X and Y axes respectively.
We define a coordinate system in the ground
plane, with axes u and v, and origin at (0,h,0) in
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
530
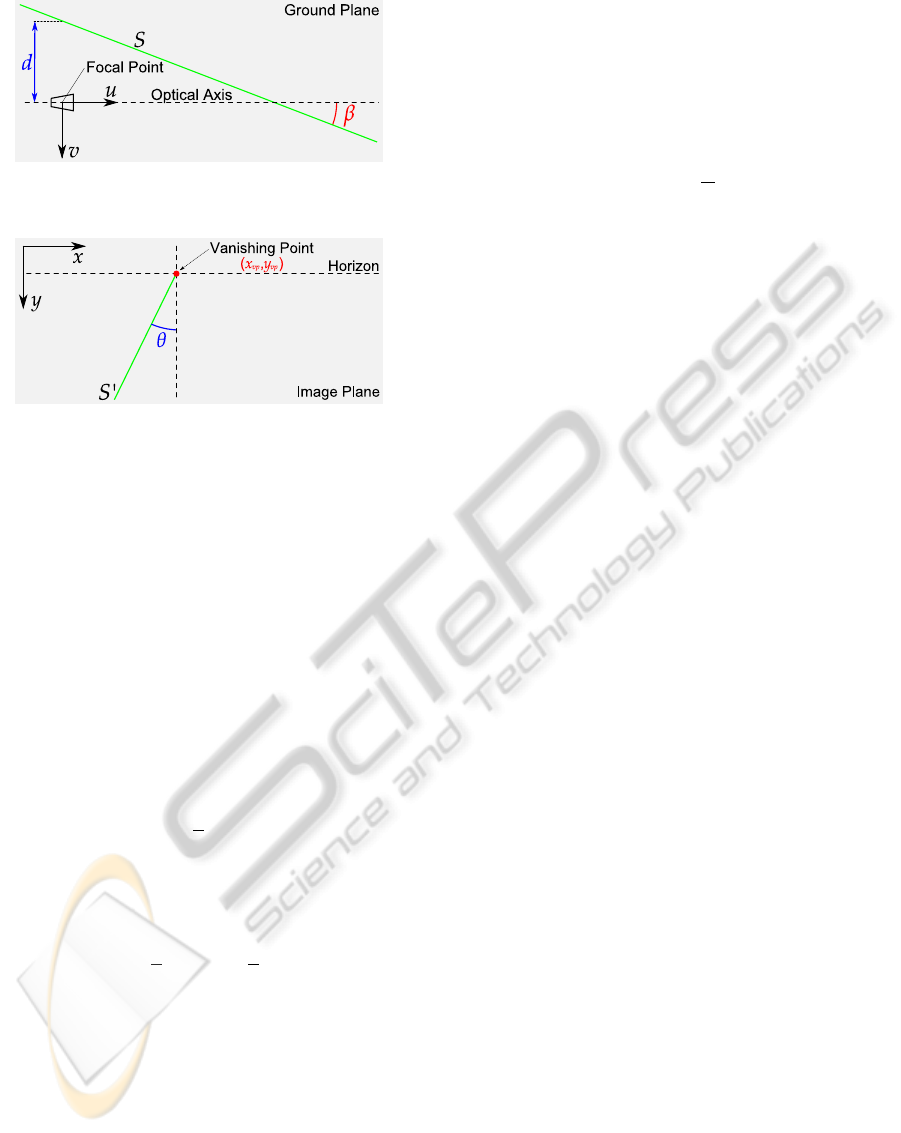
Figure 2: A top-down view of the parametrization of lines
in the ground plane.
Figure 3: The parametrisation of lines in the image plane,
relative to the VP.
the viewer coordinate system, where h is the camera
height above the ground. The v axis is parallel to the
X and x axes, but the u axis is not necessarily parallel
to the Z axis, due to the tilt, α, of the camera relative
to the ground plane.
Now consider a straight line, S in the ground
plane, such as a road marking’s edge line, and assume
that the VP of S in the image has already been de-
termined to be at (x
vp
,y
vp
) (Section 5). The line S is
parametrised by (d,β), where d is its distance from
the uv-axes origin along the v axis, and β is the angle
at which it meets the u axis (Fig. 2). Hence, it is de-
fined by v = utanβ− d. The corresponding line in the
image plane, S
′
(Fig. 3) is then:
y− y
vp
=
h
d
(x− x
vp
). (1)
The line has slope h/d, hence a line in the ground
plane parametrised by (d,β) will lie in the image
plane at θ, i.e.
θ =
π
2
+ tan
−1
h
d
. (2)
Thus, the lateral position, d, of a detected edge line in
the ground plane relative to the camera, depends only
upon θ, the angle at which it was detected, and so is
invariant to translation. Crucially, this means that as
long as we know the road markings’ collective VP,
we can describe the location of each using only one
value, θ. This has two implications: firstly, it means
we can separate the tracking of the VP and the road
markings into two independent tasks, and secondly,
it means that to track a road marking, we need only
store its angle between frames.
In determining a white lane marking, we are in-
terested in finding the pair of edge lines demarcat-
ing it. Suppose θ
1
and θ
2
are the angles of two edge
lines in the image. We wish to determine the relation-
ship between these two angles, and the perpendicu-
lar distance w, between the corresponding lines in the
ground plane. Using (2) we can derive,
θ
1
= g(θ
2
,w) = tan
−1
w
h
− tan(−θ
2
)
. (3)
Hence, if we detect two road markings, we can deter-
mine the distance between them, and having detected
one edge line of a road marking we can estimate the
range of angles in which the other will lie.
4 NOVEL VARIANT OF THE HT
We begin by applying both horizontal and vertical
Scharr filters (J¨ahne et al., 1999) to the greyscale in-
put frame, to produce two gradient maps. Only those
pixels whose gradient magnitude is above a (liber-
ally selected) threshold go on to be represented in
the Hough accumulator. When transforming an edge-
pixel to the accumulator, instead of making an entry
for every value of θ, we instead use only a narrow
range, 2° each side of the edge-pixel’s angle. This is
intended to increase the speed at which the HT can
be performed, and to increase accuracy by reducing
the likelihood of erroneous maxima in the accumu-
lator. An edge pixel’s additions to the accumulator
are weighted in proportion to its gradient. This re-
sults in shorter, more well defined edge lines being
favoured over longer, more weakly defined ones. A
similar modification was made in (Jung and Kelber,
2005) for the same reason.
Parallel road markings have a common VP in
the image. We distinguish between those edge lines
which pass through or close to this VP, and those
which do not by first estimating the location of the VP,
and then performing a translation of image coordi-
nates, moving the origin to this estimated VP. We are
then able to exploit the polar coordinate system inher-
ent to the HT, by restricting the distance dimension, ρ,
of the accumulator to a narrower range, and thus omit
the parametrisations of lines which pass too far from
the VP. This amounts to only considering lines which
pass through a small circular region centred at the VP
(Fig. 4). By tracking the VP, we allow this efficiency
to continue for subsequent frames. This detection and
tracking is expounded on in Section 5.
This contrasts with the method of (McDonald,
2001) in which the VP is not explicitly detected, but
presumed to lie in a fixed rectangular region of the
image. A mask for the Hough accumulator specifies
DETECTION OF LANE DEPARTURE ON HIGH-SPEED ROADS
531
which parametrisations correspond to lines that pass
through this rectangle. A possible shortcoming of this
approach is that should the VP move out of the rect-
angle, none of the lane markings would be detected.
In order to move or resize the detection region, a new
mask would have to be created. Our method allows
the image region through which lane edge lines must
pass to be moved and resized as necessary, with no
increase in computation, with its radius, φ, based on
the covariance matrix of the VP KF (see Fig. 4). Fur-
thermore, our method uses a smaller accumulator in
which maxima can be found more quickly.
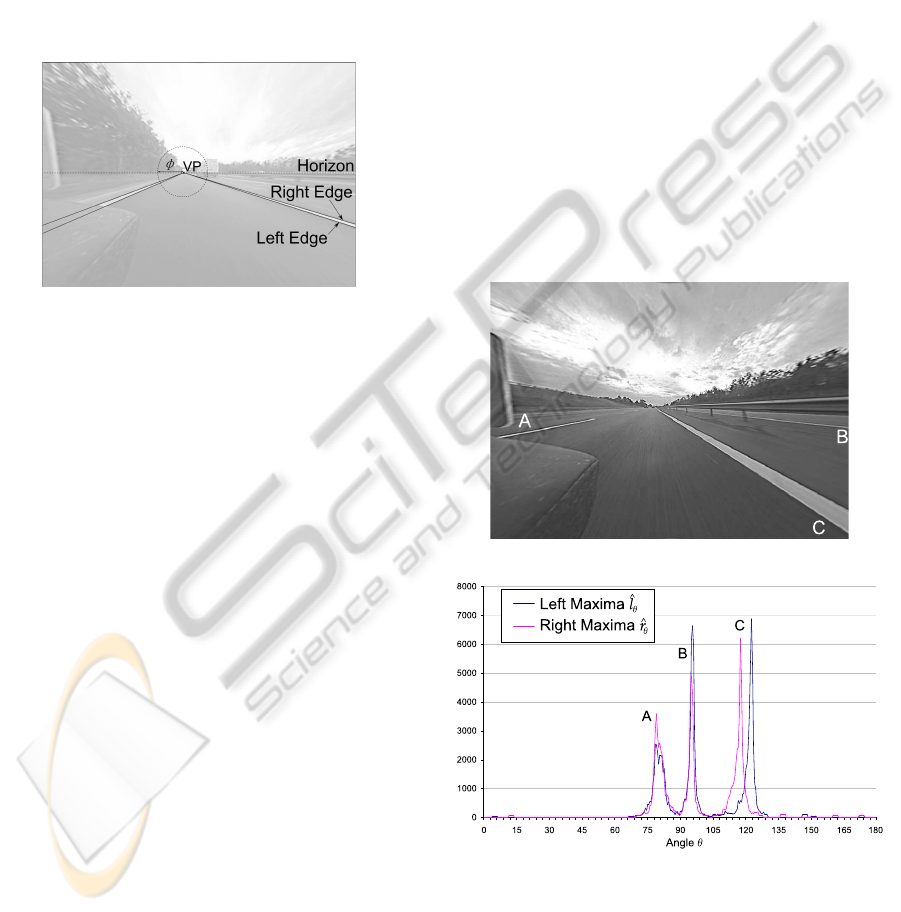
Figure 4: The circle of detection, and left and right edges.
Road markings are, by design, among the bright-
est objects on the road and have definite edges along
the transition from bright white paint to darker grey
road material. Since they are of constant width, they
have two parallel edge lines of opposite gradient di-
rection. We exploit both the sharpness of these gra-
dients, and the fact that they occur in converse pairs,
to distinguish them from other objects parallel to the
lane, such as barriers and nearby vehicles.
Our accumulator is a 2D array, A(ρ, θ), where ρ
specifies the perpendicular distance from a line to the
origin, and θ is the angle of the line. We refer to edge
pixels at which the image intensity increases in the
anti-clockwise direction about the VP, as the left edge
line of a road marking, and similarly, edge points at
which the image intensity increases in the clockwise
direction, as right edge line (Fig. 4). Each element of
the 2D accumulator stores two values, l and r, cor-
responding to left and right edges respectively, i.e.
A(ρ,θ) = (l,r).
Hence, the accumulator has two channels, a left
channel and a right channel. When performing the
HT, a pixel’s gradient direction is used to determine
which edge type it lies upon, and its addition to the
accumulator is then made to the corresponding chan-
nel. This means each occurrence of a lane marking
is characterised in the accumulator by a pair of rel-
atively high values, not more than a certain distance
apart, with one being in each channel.
To facilitate the identification of pairs of maxima
in the accumulator, the largest value is taken from
each column of each channel of the accumulator and
recorded along with the value of ρ at which it oc-
curred, i.e. we obtain for each of the (l,r) channels in
A, a 1D array of values, resulting in two arrays, L(θ)
and R(θ), which we refer to as the left maximum array
and the right maximum array respectively,
L(θ) = (
ˆ
ρ
l
θ
,
ˆ
l
θ
), R(θ) = (
ˆ
ρ
r
θ
, ˆr
θ
) (4)
with,
ˆ
ρ
l
θ
= argmax
ρ
A
l
(ρ,θ)
(5)
ˆ
l
θ
= max
ρ
A
l
(ρ,θ)
(6)
where A
l
and A
r
are the left and right channels of
A respectively, and
ˆ
ρ
r
θ
and ˆr
θ
are defined similarly.
An example of a typical frame and a graph showing
the contents of the maximum arrays resulting from
our HT are shown in Fig. 5. The graph clearly shows
three pairs of peaks, each representing one of the three
road markings visible in the frame.
(a) A typical frame.
(b) A plot of the two maximum arrays derived from the Hough accumulator
for the frame above.
Figure 5: Labels A, B, C mark the correspondence of the
peaks in maxima arrays
ˆ
l
θ
and ˆr
θ
to lane markings.
This reduction in dimension greatly simplifies
lane marking detection, as we later describe. It makes
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
532
the assumption however, that for each θ-value, there
will be at most one relevant maximum in each accu-
mulator channel. This is equivalent to the assumption
that no two relevant edge lines will be parallel in the
image. We consider this to be a credible assumption
for two reasons. Firstly, most linear objects in the
road environment are parallel to the road, and hence
share the same VP in the image as the road lane. This
implies that their edge lines are not parallel in the im-
age. Secondly, to be detected, edge lines must pass
through a relatively small circle around the VP. If a
detected edge line does have a parallel elsewhere in
the image, it is unlikely that it will be detected.
To summarise, there are four key differences be-
tween our method and the classical HT method: (a)
edge direction is taken into account when applying
the transform to a pixel, (b) the values added to the
accumulator are proportional to gradient magnitudes,
(c) we move the image origin to the VP, so that accu-
mulator maxima corresponding to relevant edges lie
near ρ = 0, and (d) we use two accumulator channels
for left and right edges.
4.1 Road Marking Detection
Once the maximum arrays for a frame have been com-
puted, the average value is calculated over both ar-
rays. This givesa measure of the overall edge strength
in the frame, and is used to automatically set appropri-
ate thresholds for road marking detection. This is in-
tended to allow the system to quickly adapt to chang-
ing weather and light levels.
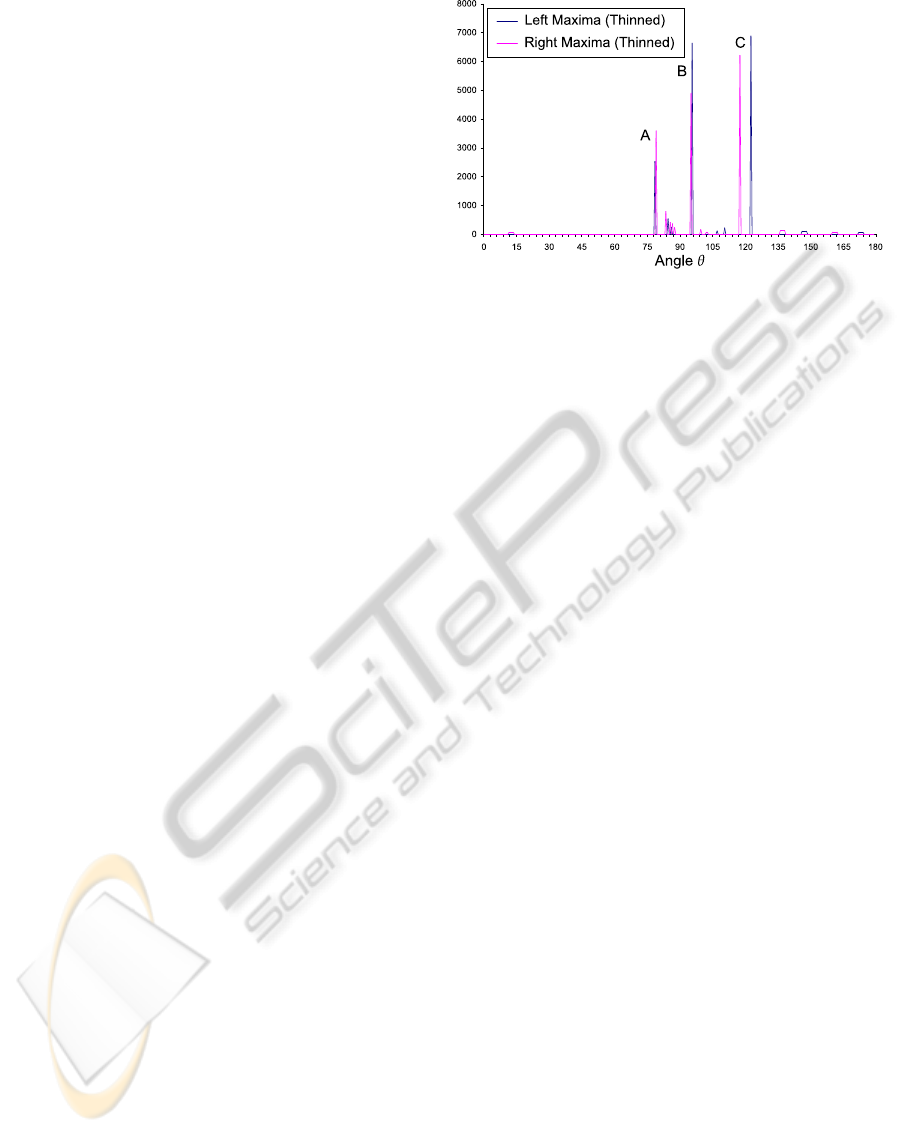
To simplify the process of detecting pairs of sig-
nificant local maxima in the two maximum arrays, we
‘thin’ each array by suppressing secondary maxima.
For each value of θ, we imagine a line at that angle.
We use (3) to calculate what range of angles is likely
to represent lines in the ground plane which lie within
a small lateral distance w of that line. In the maximum
arrays, we keep only the largest value in the range,
and set the rest to zero. More formally, we replace
each
ˆ
l
θ
by f
l
(θ), where,
f
l
(θ) =
ˆ
l
θ
if
ˆ
l
θ
= max
θ
′
∈G(θ,w)
ˆ
l
θ
′
0 otherwise
(7)
where G(θ, w) = [g(θ,−w),g(θ,w)] with g(θ,w) as
in (3). Values of ˆr
θ
are treated similarly. The result is
a sparse set of peaks, corresponding to lines that meet
at the VP and we expect to be lane markings; for an
example see Fig. 6.
As shown in Section 3, we can define each line
parallel to the lane, by a single value, θ. We de-
scribe each road marking by the angle of its central
Figure 6: The data shown in Fig. 5(b) after ’thinning’.
line, by averaging the angles of its two edge lines.
Given this angle, and a maximal thickness of a linear
road marking w, we use (3) to determine the appropri-
ate range of θ to search in the maximum arrays. We
determine w empirically to be approximately 32cm.
To increase performance, the ranges of θ values are
calculated off-line and stored in an array. We require
peaks to be larger than a certain threshold, which is
proportional to the automatic edge strength measure
described above. We also impose other criteria, such
as a maximal ratio between the peaks’ values, and a
maximal difference between their corresponding ρ-
values. Once a road marking is detected, its central
angle is used to track it in the next frame.
Due to the lens and camera position employed in
our system, road markings close to the vehicle take
up a large proportion of the frame, and appear almost
straight even on curved roads. For this reason, our
method is appropriate even for roads of some curva-
ture, and is especially useful for a LDWS since nearer
road markings give the best indication of the vehicle’s
current position relative to the lane.
4.2 Tracking of Road Markings
To track road markings, we use an EKF (see the
model used in Fig. 7) which is able to track either
one or two road markings. The approach used is to di-
rectly track those road markings which are of immedi-
ate concern, i.e. the ones which delimit the vehicle’s
current lane. Then, the motion of the tracked mark-
ings is used to predict the locations of the road mark-
ings which are not tracked based on the assumption
that all relevant road markings are parallel, and thus
share the same lateral velocity relative to the camera.
This is particularly useful in maintaining the tracking
of dashed or occluded road markings
From (2) we can determine the position of a road
marking in the ground plane to be,
λ = tan(−θ), (8)
DETECTION OF LANE DEPARTURE ON HIGH-SPEED ROADS
533

where θ is the angle of the line in the image plane,
and λ is the lateral offset from the camera in units of
h. There are three quantities which comprise the ob-
servation of the lane. The first two are the angles in
the image plane at which each of the left and right
lane boundary markings were detected, θ
l
and θ
r
re-
spectively. The third is the lateral velocity, ν, which
is measured using the changes in road markings’ po-
sitions between frames. We calculate their lateral po-
sition on the ground plane, determine the movement
of each, and take the mean. Lane width ψ is calcu-
lated as the difference in the lateral positions of the
two road markings delimiting the lane.
If one of the two lane boundary markings is not
detected in a frame, its position is inferred using the
position of the other, and the model’s current estimate
of the lane width, ψ. Should neither lane boundary
marking be detected, the model’s prediction is used as
the next model state, and the model state’s covariance
updated accordingly, bypassing the weighting and up-
date stages. This continues until either one or both
of the lane delimiting markings is explicitly detected,
or until one of them has been absent for a sufficient
number of frames that it is deemed no longer to ex-
ist. Similarly, if no estimate of ν can be made, it is
assumed to remain constant.
4.3 Management of Road Markings
For each tracked road marking, we store details such
as its age (number of frames since first detection) and
its recent absences (number of frames since last de-
tected), which are used to decide whether or not it
is a lane boundary. This increases robustness against
mis-detections, e.g. by requiring that a road marking
be detected in 4 consecutive frames before it is con-
sidered real. It also allows dashed and occluded road
markings to be maintained in the list despite not being
detected for severalframes at a time, while at the same
time not allowing such transient features as writing on
the road surface to be mistaken for lane delimiters.
• The distance from the camera
to the left of the lane, λ.
• The width of the lane, ψ.
• The lateral velocity of the
lane, relative to the camera, ν.
Figure 7: The model used in the EKF.
Given (8), we can calculate the lateral distance of
a road marking from the camera using its angle in the
image. We can hence determine whether the vehicle
is on top of, or close to, each road marking. This
allows us to deduce whether the driver is in danger
of making an accidental lane departure. We require
that the vehicle be within 15cm of a lane boundary, or
within 30cm and moving towards it, in order to trigger
an alarm. These limits are easily adjustable to suit.
Should the vehicle approach a lane boundary
quickly, this warning will occur very soon before the
vehicle actually crosses the boundary. In order to
warn the driver earlier, we use a third criterion which
combines the distance from the lane boundary with
the lateral velocity of the vehicle relative to it. In
(Godthelp et al., 1984) the distance of a lane bound-
ary from the vehicle is divided by the lateral veloc-
ity, to give a time-to-lane-crossing (TLC) value. We
use the same method, and trigger an alarm whenever
this TLC value falls below 25 frames. If employed
on an actual vehicle, this alarm could be suppressed
when the corresponding direction indicator is acti-
vated, thus detecting only accidental lane departures.
5 LOCATING & TRACKING THE
VP
In (Cantoni et al., 2001) a method of estimating the
VP in an image was proposed that involved a MSE
minimization method to the contents of the Hough ac-
cumulator. We apply the same process but only to the
parameters of detected road markings. This means
fewer points must be processed, and, should the im-
age contain multiple VPs, we can be more certain that
we have identified the correct one.
Given N lines, parametrised by (ρ
i
,θ
i
) for i =
1,...,N, we estimate their VP ˆx
vp
, ˆy
vp
as:
ˆx
vp
=
AE − CD
AB− C
2
, ˆy
vp
=
BD− CE
AB− C
2
, (9)
where,
A =
N
∑
i=1
sin
2
θ
i
, B =
N
∑
i=1
cos
2
θ
i
, C =
N
∑
i=1
cosθ
i
sinθ
i
,
D =
N
∑
i=1
ρ
i
sinθ
i
, and E =
N
∑
i=1
ρ
i
cosθ
i
.
In order for a road marking’s position to contribute
to the estimate of VP location in a frame, it must have
been detected in that frame and be old enough to be
considered a genuine road marking (see Section 4.3).
Lookup tables are used to increase performance.
To track the VP, a simple KF is used, with a con-
stant position model consisting only of the VP’s co-
ordinates in the image. Though this is an almost triv-
ial instance of a KF, it has an important advantage
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
534
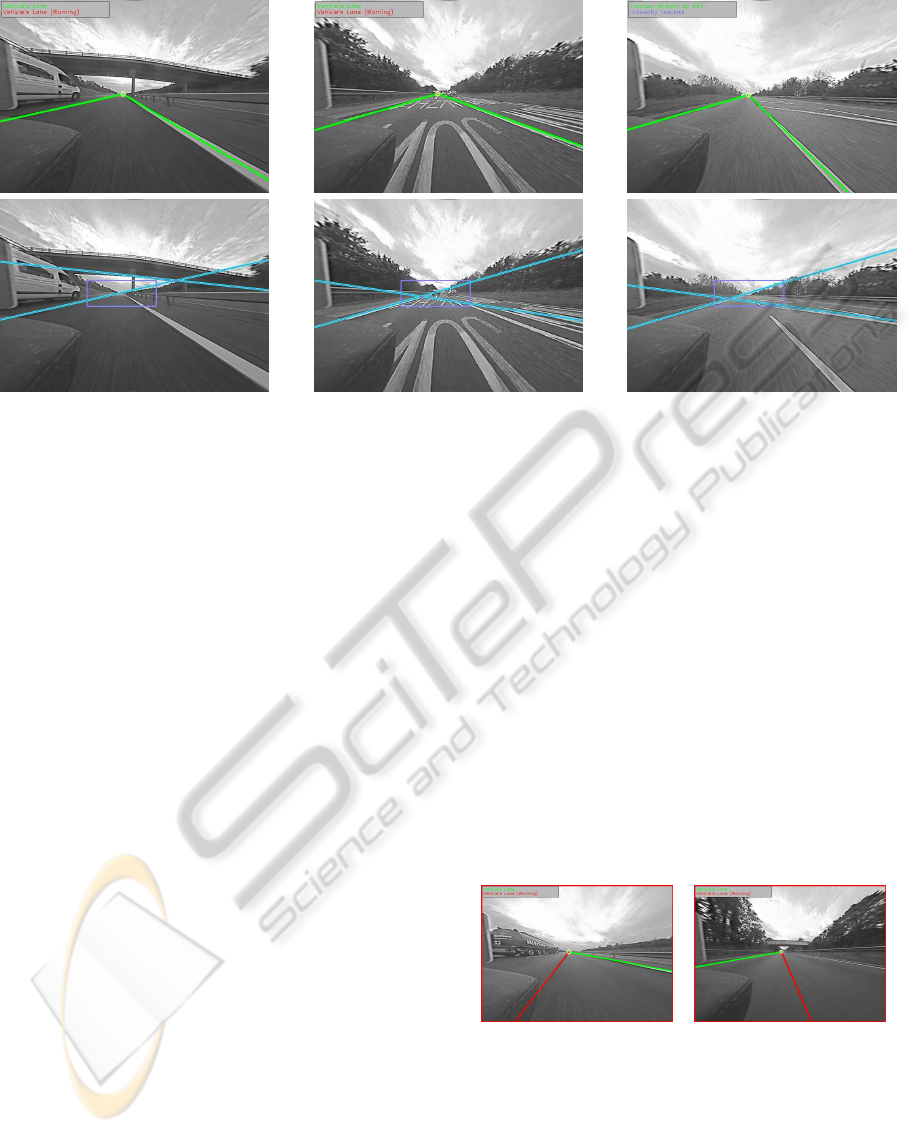
Figure 8: Our system (top) tracking lanes in the face of clutter, compared to McDonald (bottom).
over simpler methods such as exponential averaging.
There may be frames in which insufficient road mark-
ings are found to give a reliable estimate of VP loca-
tion. In such cases we simply use the model’s predic-
tion of VP location (i.e. that it remains where it is),
but increase the model’s covariance. When the VP’s
location can again be observed, the model will have
higher variance, and so more weight will be given to
the observation, resulting in the VP returning more
quickly to its true coordinates. Quantitative experi-
ments confirm that VP tracking accuracy is much im-
proved by the KF (Section 6).
As the location of the VP is used in the detection
of road markings, and the locations of road markings
are used to determine the VP, the system requires an
initial bootstrapping phase. This is achieved by ini-
tially setting the VP to be in the centre of the frame
and using a large radius of detection in the HT. As
road markings are detected, the covariance of the VP
KF decreases, and the radius of detection with it. In
our experiments, the VP KF typically takes around 1s
to converge to the correct location.
6 RESULTS
We present our results, comparing against those of
(McDonald, 2001), which is the closest work to
ours in methodology. Though there are currently
several commercially available LDWSs, we are un-
able to provide comparison with them as details of
their methodology remain undisclosed. These in-
clude Mobileye’s lane departure warning application
(Mobileye
®
N.V., 2010), which is integrated into sev-
eral manufacturers’ vehicles.
We also show examples of lanes being tracked de-
spite transient occlusions. In our approach, we esti-
mate the VP and do not process pixels above the hori-
zon. McDonald’s method does not locate the hori-
zon or VP, so in order to make the comparison fair
when applying McDonald’s method to our data, we
measured the ratio of image area above and below the
horizon in the examples shown in (McDonald, 2001),
and removed a portion of the frame in our data, to
achieve a similar ratio. In the examples, for McDon-
ald’s method, the rectangle through which lines must
pass in order to be detected is shown in lilac.
Fig. 9 shows two examples of lane change detec-
tion by the proposed method - in the left figure the ve-
hicle is crossing to the left and in the right it is about
to cross the lane to its right. Road markings being
crossed are shown in red.
Figure 9: Examples of lane changes being detected.
Fig. 8 demonstrates key advantages of the pro-
posed method. Firstly, strong edges not belonging to
road markings are not detected. McDonald’s method
(McDonald, 2001) is confused by strong edges, e.g.
in the 1
st
column of Fig. 8, the edge between the un-
derside of a bridge and the sky, is detected as a road
marking. Because (McDonald, 2001) only tracks two
DETECTION OF LANE DEPARTURE ON HIGH-SPEED ROADS
535

road markings, when some other object is mistaken
for a road marking, a real road marking goes unde-
tected. Our proposed method does not detect strong
non-lane edges for two reasons. Firstly, estimating
the VP allows everything above the horizon to be ig-
nored, and so other vehicles or objects on the roadside
have much less influence. Secondly, instead of sim-
ply detecting edge lines, our method requires them to
be correctly paired, and so edges which do not corre-
spond to road markings are not detected.
Figure 10: Lane markings being tracked through occlusion.
In general, our method shows high detection ac-
curacy and good resistance to visual clutter. As Fig.
8 demonstrates, McDonald’s method copes less well
with such interference. In these respects, we fulfil the
first two of the criteria outlined in Section 1. Since we
track multiple road markings, our method also satis-
fies the third criteria. Fig. 10 shows tracking of lane
markings through occlusion by nearby vehicles.
We performed a quantitativeassessment of our VP
tracking by first manually determining the VP in 200
consecutive frames. Then we measured the distance
between the proposed method’s VP location and the
ground truth to have a mean of 2.0 pixels with a vari-
ance of 2.7. With the KF turned off, the mean was 4.4
pixels with a variance of 15.7.
Using a single thread on an Intel Core i5-660 CPU
at 3.33 GHz, our system can achieve an average per-
formance of 64 fps. The proposed method involves a
few parameters, for example, how long a road mark-
ing is tracked for before it is considered to be a lane
boundary, and how long one goes undetected before
it is dropped by the system. The values for all our
parameters have been empirically determined and re-
mained constant in all the experiments.
7 CONCLUSIONS
We described a novel variant of the HT for the detec-
tion and tracking of linear road markings, with several
novel refinements to the classical HT method, includ-
ing the use of two accumulators and the translation of
image coordinates to put their origin at the VP to fa-
cilitate more efficient analysis, such as ignoring road
markings which are not parallel to the lane. The VP
is also detected and tracked, and feeds back into the
HT process for subsequent frames. The method ex-
hibits real-time performance with spare capacity for
additional tasks.
ACKNOWLEDGEMENTS
The authors would like to thank Jaguar Land Rover
for their support and supply of videos.
REFERENCES
Cantoni, V., Lombardi, L., Porta, M., and Sicard, N. (2001).
Vanishing point detection: Representation analysis and
new approaches. In Proc. of ICIAP.
D’Cruz, C. and Jia Zou, J. (2007). Lane detection for driver
assistance and intelligent vehicle applications. In ISCIT
2007, pp. 1291–1296.
Godthelp, H., Milgram, P., and Blaauw, G. (1984). The de-
velopment of a time-related measure to describe driving
strategy. Human Factors: Journal of HFES.
Horne, J. A. and Reyner, L. A. (1995). Sleep related vehicle
accidents. BMJ, 310(6979):565–567.
Ieng, S.-S., Vrignon, J., Gruyer, D., and Aubert, D. (2005).
A new multi-lanes detection using multi-camera for ro-
bust vehicle location. In Proc. IEEE IV, pp. 700–705.
J¨ahne, B., Scharr, H., and K¨orkel, S. (1999). Handbook of
Computer Vision and Applications., pp. 125–152.
Jung, C. R. and Kelber, C. R. (2005). Lane following and
lane departure using a linear-parabolic model. Image and
Vision Computing, 23(13):1192–1202.
Lipski, C., Scholz, B., Berger, K., Linz, C., Stich, T., and
Magnor, M. (2008). A fast & robust approach to lane
marking detection & lane tracking. In SSIAI, pp. 57–60.
Loose, H. and Franke, U. (2010). B-spline-based road
model for 3d lane recognition. In Proc 13th Intelligent
Transportation Systems, pp. 91–98.
McDonald, J. (2001). Application of the HT to lane detec-
tion & following on high speed roads. In ISSC.
Mobileye
®
N.V. (2010). Lane Departure Warning.
http://www.mobileye.com.
NCSDR/NHTSA Expert Panel on Driver Fatigue and
Sleepiness (1998). Drowsy driving and automobile
crashes, Report No. DOT HS 808 707.
Rimini-Doering, M., Altmueller, T., Ladstaetter, U., and
Rossmeier, M. (2005). Effects of lane departure warning
on drowsy drivers performance and state in a simulator.
In 3rd Int. Driving Symp. on Human Factors in Driver
Assessment, Training, & Vehicle Design, pp. 88–95.
Voisin, V., Avila, M., Emile, B., Begot, S., and Bardet, J.-
C. (2005). Road markings detection and tracking using
Hough transform and Kalman filter. In Advanced Con-
cepts for Intelligent Vision Systems, pp. 76–83.
Wu, B.-F., Lin, C.-T., and Chen, Y.-L. (2009). Dynamic cal-
ibration and occlusion handling algorithms for lane track-
ing. In IEEE TIE, vol. 56, pp. 1757–1773.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
536
