
A REALIZATION OF GOAL-DIRECTED BEHAVIOR
Implementing a Robot Model Based on Cortico-Striato-Thalamic Circuits
Berat Denizdurduran and Neslihan Serap Sengor
Electronics and Communication Department, Istanbul Technical University, Maslak, Istanbul, Turkey
Keywords: Action Selection, Goal-directed Behaviour, Reinforcement Learning, Robot Model.
Abstract: Computational models of cognitive processes based on neural substrates clarify our understanding of the
ongoing mechanisms during these high order processes. These models also inspire new approaches and
techniques for implementing intelligent systems. Here, an implementation of goal-directed behaviour on
Khepera II mobile robot will be presented. The main point of this work is to show the potential use of robot
models for tasks requiring high order processes like goal-directed behaviour.
1 INTRODUCTION
The computational models of neural systems can be
considered as tools to understand the cognition.
Thus obtaining these models and showing their
effectiveness would stimulate studies in cognitive
science and inspire the development of new
approaches for intelligent systems.
Amongst the wide spectrum of high order
cognitive processes such as planning, selective
attention, decision making; goal-directed behaviour
has driven a specific attention. To consider goal-
directed behaviour as composed of two processes:
action selection and reinforcement learning bore a
computationally tractable model (Sengor, 2008).
Though there are numerous computational models
for action selection (Gurney, 2001), (Taylor, 2000)
and reinforcement learning (Schultz, 1997), (Dayan,
2009), few consider them together (Sengor, 2008),
(Humphrys, 1997). These models consider the role
of neural structures especially the basal ganglia, so
they are biologically plausible models. Based on the
models of basal ganglia behavioural disorders such
as addiction (Gutkin, 2006), and different processes
as feature detection are studied (Saeb, 2009).
There are also some work considering the robot
models of neural substrates and some others where
cognitive processes are investigated considering
these robot models (Webb, 2000), (Fleischer, 2009),
(Prescott, 2006). In the well-known work of Prescott
(Prescott, 2006) a robot model for action selection is
given. This robot model mimics the behaviour of a
rat in an unfamiliar environment and it is based on
mathematical model of basal ganglia which is
inspired by neurophysiologic studies (Gurney,
2001). In this robot model which is implemented on
Khepera II, it is shown that basal ganglia take part in
selecting an action amongst different choices based
on the saliencies of each possibility.
Here, the idea is to develop the work in (Prescott,
2006), further by implementing reinforcement
learning to determine the saliencies which influence
the choice of the rat. The process of learning has not
been considered in (Prescott, 2006), where the
choices depend only on a priori saliencies. So the
saliencies are reconsidered and priority of one over
the other is determined according to the
environmental conditions with reinforcement
learning. It is shown that a simpler model of the
cortico-striato-thalamic circuit considered for action
selection can fulfil the expected behaviour based on
these saliencies. Thus, the improvement of this work
over (Prescott, 2006), is the utilization of
reinforcement learning to determine the choices and
this is provided by using a simpler model of cortico-
striato-thalamic circuit for action selection (Sengor,
2008).
In the sequel, first the computational model
proposed in (Sengor, 2008) will be summarized,
than the task and implementation of the model on
the Khepera II mobile robot will be given. In
section 3, simulation results will be given, and in the
last section the expected improvements will be
discussed.
289
Denizdurduran B. and Serap Sengor N..
A REALIZATION OF GOAL-DIRECTED BEHAVIOR - Implementing a Robot Model Based on Cortico-Striato-Thalamic Circuits.
DOI: 10.5220/0003733602890294
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 289-294
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
2 COMPUTATIONAL MODEL
In this section, first a model for goal-directed
behaviour (Sengor, 2008) will be introduced. Then it
will be shown that the model is capable of selecting
an appropriate action under changing environmental
conditions and the implementation of this model on
Khepera II will be discussed.
2.1 Modelling Goal-Directed Behaviour
The sub-regions of neural system communicate with
each other by interconnection neurons and realize
any process via neurotransmitters along neural
pathways. One of these pathways is striatonigral
pathway which is associated with motor control and
related to dopaminergic pathway (Haber, 2010).
Dysfunction of this pathway causes disorders such
as Parkinson’s disease, Huntington’s disease and
Schizophrenia (Alexander, 1990). Transmission of
dopamine relates striatum with substantia nigra pars
compacta. These regions are the part of the basal
ganglia-thalamus-cortex circuits (Alexander, 1990).
Retrograde and anterograde tracing studies have
shown that the basal ganglia-thalamus-cortex
circuits and a.k.a. striatonigrostrital pathways have
important role in action selection and learning
phenomena. The cortico-striato-thalamic model
considered in this work for implementation of goal-
directed behaviour is based these neurophysiological
facts and is capable to explain how primates make
appropriate choices and learn associations between
environmental stimuli and proper actions (Sengor
2008). In (Alexander, 1990), different regions of
basal ganglia are considered for different neural
circuits, but principle substructures are proposed to
be striatum, subthalamic nucleus, globus pallidus
internal and external, substantia nigra pars reticulate
and compacta. Relationship between these
substructures, cortex and thalamus is very complex.
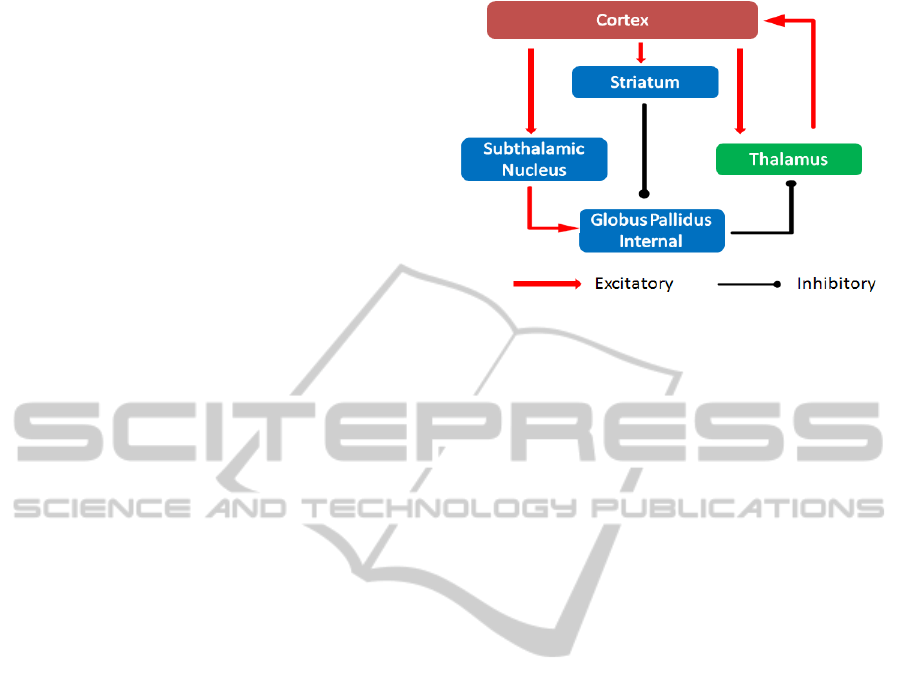
The model used in this work, consider only a
subgroup of these relations which are important for
action selection, so it is simpler. The connections
considered in the model are illustrated in Figure 1.
This computational model of action selection has
been shown to realize a sequence learning task
(Sengor, 2008). The parameters of the dynamical
system corresponding to neurotransmitters are
modified with reinforcement learning. In order to
realize the task, input substructure of the model
which is cortex transmits the sensory data to the
striatum, thalamus and subthalamic nucleus. The
main effect on cortex is due to excitatory signal from
thalamus
.
Figure 1: Basal Ganglia-Thalamus-Cortex circuit
considered in the computational model.
In the model of cortico-striato-thalamic circuit for
action selection (Sengor, 2008) all substructures act
according to tangent hyperbolic function
f(.). The
activity in the cortex is demonstrated by a difference
equation as follows:
)()()(()1( kIWkThlkCfkC
c
++=+
λ
(1)
The variables
ThlC ,
denote vectors
corresponding to cortex and thalamus and the matrix
c
W
denotes the efficiency of sensory stimulus
I
and
it is adapted through reinforcement learning.
S
in
Figure 1 corresponds to
IWS
c
=
. An action is
selected, when the value of cortex variable
C
becomes almost one. This corresponds to firing of
related neural structure.
The interconnections between substructures
striatum, subthalamic nucleus and substantia nigra
pars reticulate/globus pallidus interna, that are
respectively denoted by
i
GPStnStr ,,
are modelled
as in Eq. (2).
))()(()1(
))(()1(
))(()1(
))()(()1(
kStrkStnfkGP
kCfkStn
kCfWkStr
kGPkCfkThl
i
r
i
−=+
=+
=+
−=+
(2)
Here
r
W
denotes the effect of dopamine on
action selection. The action selection depends on
two parameters:
rc
WW ,
. In (Sengor, 2008), both of
these parameters were adapted through
reinforcement to determine the proper action.
In this work only the effect of sensory input on
action selection will be considered and
c
W
will be
ICAART 2012 - International Conference on Agents and Artificial Intelligence
290
adapted.
Adaptation of parameter
c
W
due to
reinforcement learning is given in Eq. 3:
)()()()()1( kCkSkkWkW
cc
μδ
+=+
(3)
Here
μ
is learning rate and
)(k
δ
corresponds to
error in expectation and determined as in
conventional reinforcement learning literature as
follows:
)()1()( kvkvrk
i
−++=
γ
δ
(4)
Expectation error
δ
depends on the value
v
attained
to the action selected and the reward
i
r
and
γ
is
discount factor. The value of the action is also
updated as follows:
)()()()1(
)()(
kCkkWkW
kCWkv
vv
v
μδ
+=+
=
(5)
In the equations through 1to 5, only selecting one
action is considered, so all variables are scalars.
When an action has to be selected amongst a number
of possible actions, except reward
i
r
and expectation
error
δ
all the variables corresponding to neural
substrates will be denoted by vectors and parameters
by matrices.
2.2 Implementation of the Model
The computational model summarized in section 2.1
will be modified and implemented on mobile robot
Khepera II. While implementing the model proposed
in (Sengor, 2008) on Khepera II, first the saliencies
are defined based on the sensory information
obtained from mobile robot. Another modification is
to consider
δ
as vector. The task of the robot is to
mimic the behaviour of a rat’s search for food in an
unfamiliar environment. Here, using the mobile
robot, rats’ behaviour such as searching for the food,
recognizing the food, and avoiding an obstacle and
finding the nest is simulated. All these actions will
be realized in the context of goal-directed behaviour,
thus action selection based on reinforcement
learning will be used. Thus behaviour of the rat will
be realized mimicking the cognitive processes
ongoing in neural structures.
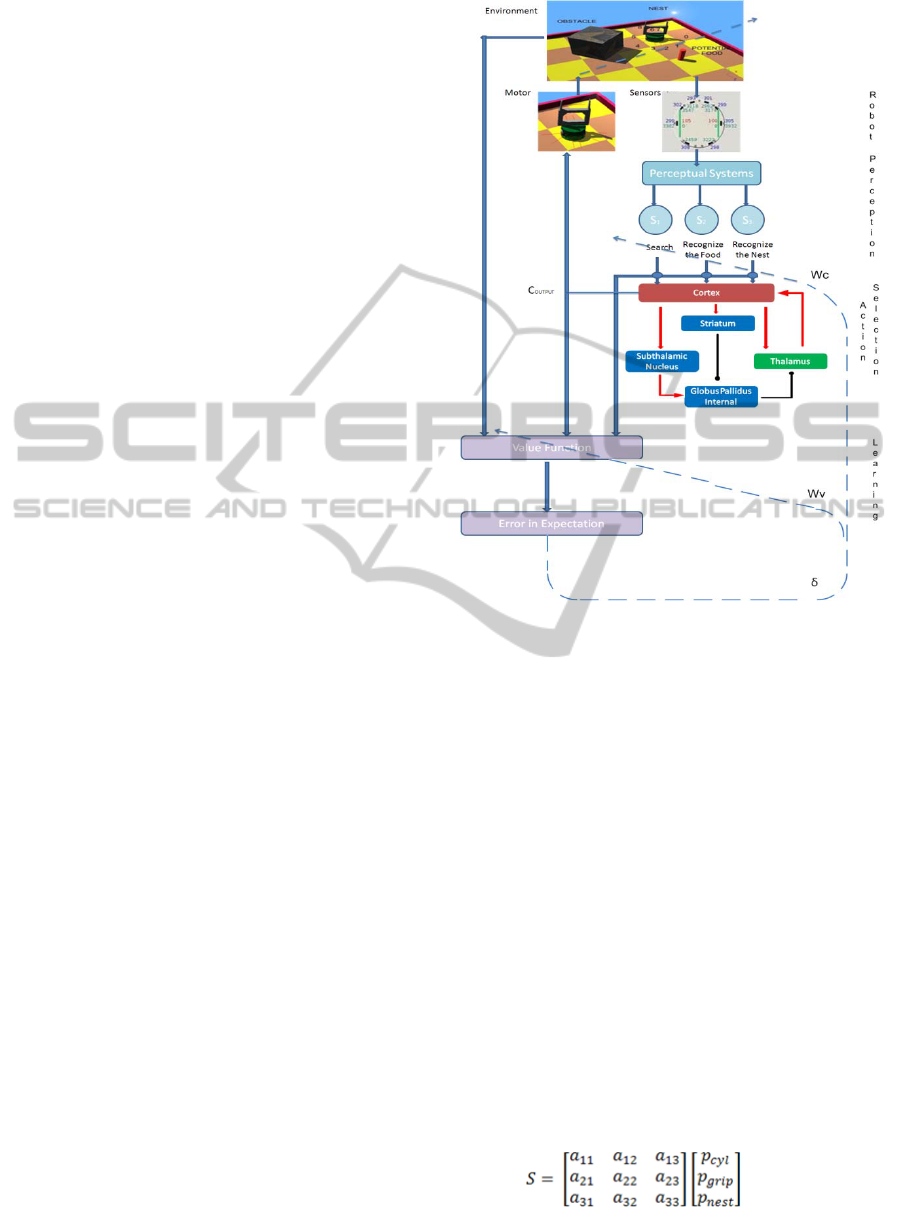
Figure 2 gives a schema of the whole
implementation. First the perception of environment
through sensors is realized and then these sensory
data interacts with action selection and
reinforcement learning blocks to fulfil the goal-
directed behaviour.
Figure 2: The architecture of the model realizing goal-
directed behaviour.
Based on the structure of Khepera II mobile
robot, the distance and light sensors are used to
collect data from environment. As it can be followed
from Figure 2, Khepera II mobile robot has 8
distance and light sensors, respectively.
These data collected from sensors form the
model input vector which is weighted by
coefficient matrix
c
W
to define the saliencies
IWS
C
=
. The dimension of this matrix is
determined by the number of action choices and the
saliencies build up the perceptual system. This
matrix is modified through reinforcement learning
process. In the problem considered, there are three
saliencies corresponding to search, recognizing the
food and recognizing the nest and they are formed
with the
data collected from sensors. This data is
considered with three different aspects
corresponding cylinder and nest distance and gripper
position. So, the saliencies are defined as follows:
(6)
A REALIZATION OF GOAL-DIRECTED BEHAVIOR - Implementing a Robot Model Based on
Cortico-Striato-Thalamic Circuits
291
Since there are three saliencies
S
built by
weighting three sensor information
I
, the dimension
of vectors and the matrix are
3
, RIS ∈ ,
33×
∈ RW
C
,
respectively. Robot distance sensors give natural
numbers between “0” to “1050” which means
absence or presence of related object. These
numbers are scaled in “0” to “1” so the variables
corresponding to distance of cylinder, gripper
position and distance of nest
,
,
are
denoted by rational numbers. This scaling is given in
Eq. (7):
)(_001.01
ˆ
)(__ isensdistivalsensdist −=
(7)
Once the saliencies are established, the cortico-
striato-thalamic circuit determines an action. This
selected action and the reward obtained for it
interacts with the learning block and the selection
process in action selection block restarts at each time
step. During this process,
C
W
is adapted
continuously, till the robot comes across cylinders or
nest. During the learning process, saliencies
determine the action selected, and selected action is
used to control the behaviour of robot. Unlike the
work of Prescott et al., (Prescott, 2006) there is no
need for a busy signal as the sensor data is
considered constantly.
The action selection adapted by reinforcement
learning block is the contribution of this work. In
(Prescott, 2006), the idea of behavioural selection is
based only on certain targets and the sensor data and
it is designed on a rule based algorithm. Early
studies of action selection and reinforcement
learning phenomena are proposed in different
contexts for separate tasks. However, both tasks are
considered together in this work.
3 SIMULATION RESULTS
Khepera II mobile robot is used to simulate the task
of a rat searching for food in an unfamiliar
environment, recognizing the nest and carrying food
there. We simulated rats’ intrinsic feelings in a
simple learning task. The robot is placed in any
starting point from which the rat could do any one of
the three goal actions. Only one of the goal actions is
chosen on each trial, and the chosen action is
searching in the beginning of the experiment. The
experiment is illustrated in Figure 3 (b).
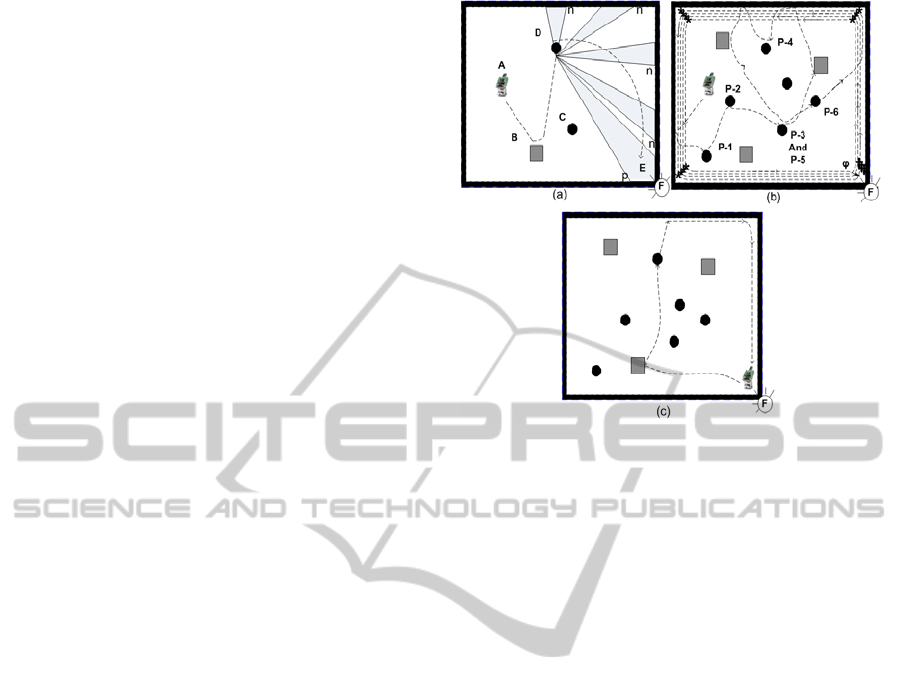
Experiments such as those illustrated in Figure 3
would clarify the difference between each process.
The case in Figure 3 (a) corresponds to the work in
(Prescott, 2006) where the saliencies are determined
Figure 3: Robot foraging on an unfamiliar environment is
illustrated with a priori saliencies, during learning and
after learning, respectively in (a), (b) and (c). n: negative
for light, p: positive for light, A: Khepera II, B: Obstacle,
C, D: Potential food, E: Nest, F: Light, P: Process of
Learning, ∗: negative for nest, †: nest but not enough for
deposit, φ: deposit it to the nest.
a priori. So robot begins to search instantly with the
correct choice, it recognizes the obstacle and food
without mistake. When food is picked up by the
robot, the light sensor begins to search light source
which is the indicator of the nest. Notice that for this
process the search continues until light sensors
recognize the nest.
In Figure 3(b), there are no a priori determined
saliencies, the robot learns the environment with the
choices it makes and the rewards it obtains. Thus it
begins with random search and it takes some trial
and error steps till it finds food, picks it up and
carries to the nest. Once the learning process is
completed, it can immediately pick up the food and
carry it to nest as shown in Figure 3(c).
As the robot is not moving at the beginning of
the experiment depicted in Figure 3(b), the
reinforcement learning block force it to move and
begin to search. This is provided by increasing
coefficient “a
11
” through reinforcement learning.
In Figure 4, the adaptation of coefficient “a
11
”,
change in expectation error and reward are given,
respectively. Once “a
11
” is large enough and
“search” salience is selected, robot begins to move.
If Khepera II robot comes across to any one of the
potential food, coefficient of “a
22
” begins to
increase. This is the learning phase of recognizing
food. Results of this phase are given in Figure 5.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
292

Figure 4: Simulation results for searching phase during
learning process. After 80
th
iteration, learning process ends
for the search salience but the given illustration is
continued till the 500
th
iteration. Reward is 1.8 for this
coefficient.
Once the robot learns to recognize food and
picks it up, it has to begin searching the nest. In
order to reach the nest the robot moves along the
wall and seeks for the light source when it finds it,
reward is given. This reward modifies the value of
“a
33
” and when “a
33
” reaches a certain value, the
robot learns the place of the nest. There are six
coefficients besides “a
11
”, “a
22
”, “a
33
” but these are
not necessary for the determination of saliencies, so
they are kept constant.
Once, the robot places the food to the nest, the
search for food begins again, but as it learned the
food and the nest it picks up the first food it comes
across and carries it to the nest directly. As, the
robot do not learn the coordinates of the latest food
it picked up, the searching process is made
randomly.
Figure 5: Simulation results for pick up and carrying
phase. After 550
th
iteration, learning process ends for this
phase. Reward is 2.2 for this coefficient.
Learning the deposit of the food in the nest is
same as the other learning routines and the results
are given in Figure 6. We can change the reward
value for each step to examine the variation of
process, so each reward selected differently. As it
can be followed from Figure 4, the small reward
need more iteration to learn the task, and when the
reward value is increased less iteration step is
needed and less try outs to learn the task. In Figure
5, the reward is chosen as 2.2 so robot learns the
potential food in 6 try outs while in Figure 6 reward
is increased and learning process for the nest ends in
4 try outs. This reinforcement learning results are
drawn in MATLAB, but the data are collected from
the environment where mobile is implemented. The
mobile robot is trained to learn to recognize the food
and the place of the nest and it is capable of
completing the task even though the conditions in
the environment changes. In 20 trials, mobile robot
recognizes the food and the nest for 17 cases. Once
the learning is completed the robot learns the place
of the nest and deposits the food there.
Figure 6: Simulation results for learning to find the nest
and deposit phase. After 1700
th
iteration, learning process
ends for finding the salience so in figure 1800
th
iteration
are shown. Reward is 3 for this coefficient.
4 CONCLUSIONS
In this work, it is shown that robot implementation
of neural circuits which are capable of realizing
reinforcement learning is possible. Here, the model
proposed in (Sengor, 2008) is reconsidered and
implemented on mobile robot Khepera II to mimic
the behaviour of a rat searching for food in an
unfamiliar environment. It has to be emphasized that
a more complex cognitive process than action
selection, i.e., goal-directed behaviour is
A REALIZATION OF GOAL-DIRECTED BEHAVIOR - Implementing a Robot Model Based on
Cortico-Striato-Thalamic Circuits
293

implemented on a mobile robot. So, the work
considered here improves (Prescott, 2006), in two
aspects, reinforcement learning process is
implemented on Khepera II and goal-directed
behaviour is realized. The task considered could be
easily upgraded for more complex scenarios.
Here the choices of the robot are determined only
by saliencies depending on sensor data. So the action
selection is due to environmental inputs. In (Shultz
1997, Dayan 2009), it has been discussed that the
action selection is affected also by the dopamine
value which is determined by emotional processes.
Thus the choices of the robot should also be
determined by
r
W
parameter. So the adaptation of
r
W
could be considered to model the emotional
drives.
ACKNOWLEDGEMENTS
The mobile robot Khepera II used for simulations
and implementations belong to I.T.U. Artificial
Intelligence and Robotics Laboratory. The authors
would like to thank the laboratory staff and
especially the coordinator Sanem Sarel Talay for
their guidance and for their sharing knowledge. This
work is partially supported by I.T.U. BAP project.
REFERENCES
Gurney, K., Prescott, T. J., Redgrave, P., 2001.
Computational Model of Action Selection in the Basal
Ganglia I: A New Functional Anatomy. Biological
Cybernetics, vol.84, 401-410.
Taylor, J. G., Taylor, N. R., 2000. Analysis of Recurrent
Cortico-Basal Ganglia-Thalamic Loops for Working
Memory. Biological Cybernetics, vol.82, 415-432.
Schultz, W., Dayan, P., Montague, P. R., 1997. A Neural
Substrate of Prediction and Reward. Science 275,
1593-1599.
Dayan, P., 2009. Dopamine, Reinforcement Learning, and
Addiction. Pharmacopsychiatry. Vol.42, 56-65.
Gillies, A., Arbuthnott, G., 2000. Computational Models
of the Basal Ganglia. Movement Disorders. 15, no. 5,
762-770.
Sengor, N. S., Karabacak, O., Steinmetz, U., 2008. A
Computational Model of Cortico- Striato-Thalamic
Circuits in Goal-Directed Behavior. LNCS 5163,
Proceedings of ICANN, 328-337.
Gutkin, B. S., Dehaene, S., Changeux, J. P., 2006. A
Neurocomputational Hypothesis for Nicotine
Addiction. PNAS, vol.103, no.4, 1106-1111.
Saeb, S., Weber, C., Triesh, J., 2009. Goal-directed
learning of features and forward models. Neural
Networks, vol.22, 586-592.
Webb, B., 2000. What does robotics offer animal
behavior? Animal Behavior, Vol. 60, 545-558
Fleischer, J. G., Edelman, G. M., 2009. Brain-based
devices. IEEE Robotics and Automation Magazine,
33-41.
Prescott, T. J., Montes-Gonzalez, F. M., Gurney, K.,
Humpries, M. D., Redgrave, P., 2006. A Robot Model
of the Basal Ganglia: Behaviour and Intrinsic
Processing. Neural Networks, 1-31.
Haber, S. N., 2010, The reward circuit: Linking primate
anatomy and human imaging. Neuropsychopharmaco-
logy Reviews, 35, 4-26.
Alexander, G. E., Crutcher, M. D., DeLong, M. R., 1990.
Basal ganglia-thalamocortical circuits: Parallel
substrates for motor, oculomotor, “prefrontal” and
“limbic” functions. Progress in Brain Research, 85,
119-146.
Humphrys, M. “Action Selection Methods Using
Reinforcement Learning”, Ph.D. Thesis, Trinity Hall,
Cambridge, 1997.
APPENDIX
The algorithm corresponding to the model
considered is summarized as follows:
Begin
SetCoefficients
SetInitialCond
GetSensorData
ScaleSensorData
1. ReinforcementLearning
If ∀DistSen=0&&grip=0&&wheels=0
EvaluationOfEquation 6-10
Update a
11
If DistSen2&&DistSen3=0
EvaluationOfEquation 6-10
Update a
22
If ∀LightSen!=0&&∀DistSen!=0
EvaluationOfEquation 6-10
Update a
33
2. Saliencies
S
i
=
∑
;i=1,2,3
3. Action Selection
For IterationStep<200
EvaluationOfEquation 1-5
4. RobotMotion
If e1>0.67&&e2<0.67&&e3<0.67
DoSalience1
If e1<0.67&&e2>0.67&&e3<0.67
DoSalience2
If e1<0.67&&e2<0.67&&e3>0.67
DoSalience3
// e
i
are cortex output values
End.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
294
