
PLANNING FOR THE CONVOY MOVEMENT PROBLEM
Anand Kumar, I. Murugeswari, Deepak Khemani and N. S. Narayanaswamy
Department of Computer Science and Engineering, Indian Institute of Technology - Madras, Chennai, India
Keywords:
Convoy routing, Convoy movement problem, Logistics, Transport.
Abstract:
Convoy movement problem has significant practical applications. The problem has been attempted in many
styles with varying results. We address it as an AI Search and Planning and Scheduling problem. The work
focuses on modeling the convoy movement problem using PDDL and attempting a solution using existing
planning methods and planners. Initial results indicated problems of scalability. To address this we propose a
two stage planning process.
1 INTRODUCTION
The convoy movement problem (CMP) is a logisti-
cal problem and addresses the issue of planning and
scheduling a fleet of convoys between their sources
and their respective destinations. Usually convoys are
many vehicles long and take days to reach their desti-
nation.
Convoys are often employed when a large num-
ber of men and or large amounts of material have to
be moved. In many situations movement by road is
the only option. Planning convoys is of strategic im-
portance and it is a time consuming job. This work
presents a study on modeling the convoy movement
problem from a planning and scheduling perspective.
Toward the end present results from our experiments
on moderately large problem instances using existing
domain independent planners.
2 CONVOY MOVEMENT
PROBLEM
The convoy movement problem has two parts to it.
First is finding out the route the convoy is going to
take to reach its destination and the second is fix-
ing the time of the actions so that the resulting plan
satisfies all relevant constraints. Route selection and
scheduling of convoys can be seen as two interdepen-
dent activities. The route selected has to be schedule-
able within the deadlines goals and vice-versa there
should be a viable route that within bounds of the im-
posed deadlines. There are constraints in the prob-
lem that involve either or both of route selection and
scheduling.
Routing Constraints. Certain roads may not support
a convoy because the infrastructure may not be
able to support say movement of heavy vehicles.
Some roads may not allow bi-directional traffic
flow. Constraints under this category are most of-
ten static.
Scheduling Constraints. These are usually deadline
constraints. There are four common forms in
which they are imposed. They are “Earliest ar-
rival time”, “Latest arrival time”, “Earliest de-
parture time” and “Latest departure time”.
Mixed Constraints. Cities most often impose con-
straints on when convoys can enter city traffic
zones. Some roads along a route might become
available for traffic only during certain time of
day. Constraints of this type affects both route
planning and scheduling.
3 RELATED WORK
The convoy movement problem has been tried in dif-
ferent forms. Most often it has been formulated as an
optimization problem (Chardaire et al., 2005; Gold-
stein et al., 2010; Montana et al., 1999). Some of
the earlier work consider convoys as point objects and
do not model their length explicitly (Chardaire et al.,
2005; Montana et al., 1999).
In (Goldstein et al., 2010) the problem they con-
sider is most similar to the work discussed above.
495
Kumar A., Murugeswari I., Khemani D. and S. Narayanaswamy N..
PLANNING FOR THE CONVOY MOVEMENT PROBLEM.
DOI: 10.5220/0003739004950498
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 495-498
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

They consider convoys in the case of disaster recov-
ery and management. Genetic algorithm is used for
finding the solution. The initial state consists of the
shortest path between the source and destination for
each convoy. The cost function in this case considers
a linear combination of penalties for vertex overlaps
(no. of common vertexes between paths) and edge
overlaps (no. of common edges between paths).
In (Chardaire et al., 2005) the cost function de-
fined is focused on the time taken for the convoys to
reach their destination over a given path. Length of
the convoy is modeled indirectly as a guard time in-
terval. We start from a set of simple paths between
source and destination and optimize using integer pro-
gramming.
In (Montana et al., 1999) genetic algorithms are
used for route selection and convoy scheduling. In
this work the convoy schedules are optimized for min-
imum cargo weight time and minimum civilian traffic
disruption. These are objectives that the current work
does not attempt to address.
4 PDDL MODEL
PDDL has chosen as the domain description language
because this allows use of existing planners for study.
The models were developed incrementally. The initial
model is a single domain incorporating operators that
together model all constraints listed in 4.1.
4.1 Constraints Modeled
The set of constraints that we have currently modeled
are
• Edges have direction and may not allow two way
traffic.
• Nodes that allow halting have a specified capacity.
• Convoys have size which is proportional to their
length.
• Each convoy has its own length.
• Each convoy has its own speed.
• Each convoy has to maintain a minimum distance
from the convoy ahead of it.
4.2 Model Details
Roads in the networks are modeled as directed edges
in a graph. This allows traffic directions to be mod-
eled. To impose this constraint, it is assumed that con-
voys always move from left to right along an edge.
This allows us to make the move operators require
the convoys to move from the left end node, marked
by asserting (left-vertex ?v - vertex ?e - edge), to the
right end node, marked by asserting (right-vertex ?v
- vertex ?e - edge). Nodes where convoys can halt
are marked as halting grounds using the predicate
(halting-ground ?v - vertex). Convoys have heads
and tails. The tail follows the head taking the same
path. This is achieved by asserting the (head-edge ?c
- convoy ?v - vertex ?e - edge) predicate whenever the
head enters a new edge and is de-asserted after the
tail passes through. Fluents are used to model the size
(convoy-size ?c - convoy), speed (convoy-speed ?c -
convoy) and capacity (free-space ?v - vertex) param-
eters. The minimum inter-convoy distance that is to
observed is a constant so we can model this constraint
by increasing each convoys length appropriately.
4.2.1 Operators
There are four classes of operators in this model.
These operators are enter, exit, unwind and move. As
we are handling convoy length in the model, a single
move, enter, exit or unwind operator does not suffice.
The operators enter, exit and unwind each have three
cases and the move operator has nine cases. Thus the
model in total has 18 operators. The operators are dis-
cussed in detail below.
4.3 Observations
State space planners using planning graph heuristic
perform poorly because they spend most of the time
grounding actions. The domain has 18 operators in
PDDL and each of these have at least 3 parameters.
The parameters are of type convoy, vertex and edge
respectively. Now assume a 8x8 grid domain. This
has 81 vertexes with 89 edges. Suppose we have 8
convoys this amountsto 81x89x8 variationsof one op-
erator. So we have a total of 81x89x8x18 = 1038096
ground actions. This exponential blow up severely
affects scaling. Plan space planners also performed
poorly in our experiments. This can be attributed
to poor heuristics and the high branching factors in-
volved in the domain.
5 TWO STAGE PLANNING
5.1 Two Stage Process
To overcome the scaling issue introduced by sec-
tion 4.3, we introduce a two staged planning method.
The first stage is broadly concerned with finding con-
voy routes and the second stage deals with the addi-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
496
Simplified
domain and
problem
Stage 1
Planning
Process
path for
each convoy
Domain with
additional
constraints
Stage 2
Planning
Output
final plan
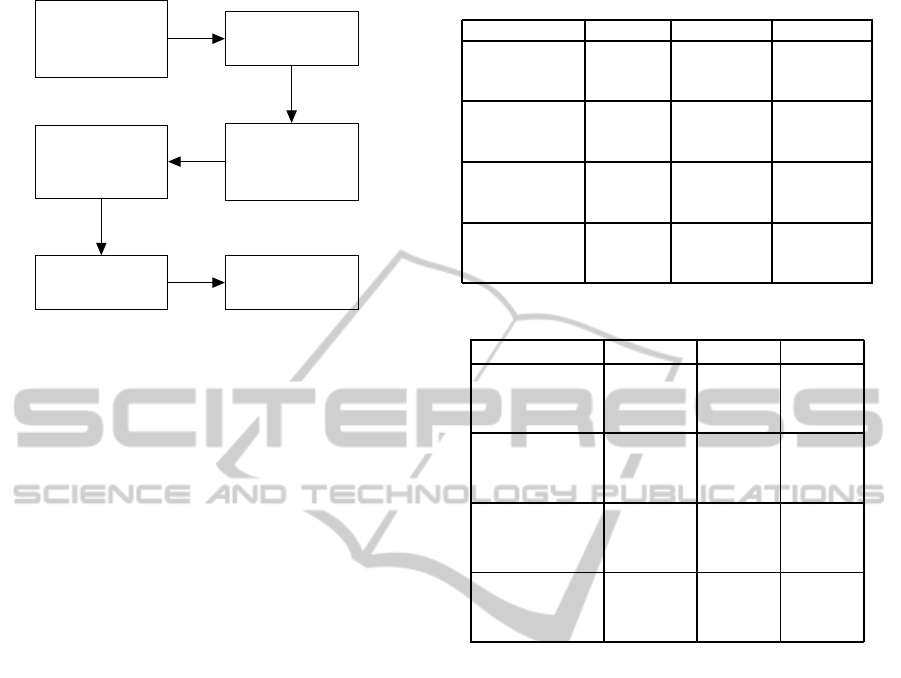
Figure 1: Two stage planning.
tional constraints that arise due to length of the con-
voys. The first stage uses a simplified domain model
as compared to the one detailed in section 4. This
model models point convoys and edge exclusivity for
convoys.
The second stage deals with all the constraints
dealt with in the monolithic model, in fact the same
PDDL model is augmented and used again. We al-
ter this model by removing the generic move opera-
tor with ground actions for each convoy. As noted
in section 4.2.1 the move operator has 9 variants and
contributes significantly against scaling. This leads
to faster planning times. Figure 1 depicts the whole
process.
5.1.1 PDDL Details
The first stage of the two stage model uses a simpli-
fied domain model. This model is geared toward find-
ing routes for all the convoys while making sure that
more than one convoy does not enter an edge simul-
taneously. It does not model convoy lengths. It has
three operators in all. They are enter, exit and move.
The second stage uses the monolithic model dis-
cussed in section 4 with the move operators replaced
by appropriately grounded actions for each convoy as
discussed in section 5.1
5.2 Experiment Results
The trial runs were conducted on two sets of problems
with the same object count. One is a set of random
graphs and the other a grid graph. All the graphs are
directed. All experiment runs were done using LPG-
td (Gerevini et al., 2006) as the planner for both stages
of planning. Results from the experiments conducted
are given in Tables 1 and 2. The planning process has
an overall timeout of 20 minutes. The experiments
Table 1: Result on random graph.
Nodes, Edges Convoys Stage 1 (s) Stage 2 (s)
25 , 80
10 0.1 0.02
20 0.09 0.02
30 0.09 0.02
100, 360
10 1.1 0.07
20 1.15 0.12
30 1.15 0.16
225, 840
10 5.4 0.38
20 5.37 0.13
30 5.42 0.13
400,1520
10 15.0 0.61
20 15.0 0.3
30 15.0 0.3
Table 2: Result on grid graph.
Nodes, Edges Convoys Stage 1 Stage 2
25, 80
10 0.11 0.45
20 0.09 0.08
30 0.1 0.07
100, 360
10 1.32 9.96
20 1.38 0.86
30 1.38 16.0
225, 840
10 7.62 4.65
20 8.29 50.0
30 8.26 474.0
400, 1520
10 - -
20 - -
30 - -
were conducted on a machine with Q9550 processor
and 4 GB of ram.
From the above tables we can see that the newpro-
cess has given results on domain which are much big-
ger than the domains we were able to deal with in the
single stage planning process. Another interesting re-
sult that we can observe from the above tables is that
the topology of the graph plays an important role in
the time consumed for the planning process. More ex-
periments have to be made for making strong claims
in this regard. At present we are speculating that tight
topologies like the grid lead to very few actions being
pruned, weakening of the heuristic used or both.
6 FUTURE WORK
6.1 Case for Local Search
In the real world convoys are used in logistics plan-
ning and execution. This translates to a decision sup-
port system in many cases. One characteristic of this
system that is of interest is that we might want to
be able to plan around hazards when execution fails.
PLANNING FOR THE CONVOY MOVEMENT PROBLEM
497

C
BA
D
Figure 2: Convoy crossover.
This would also mean preservation of as much of the
existing plan as possible. Another characteristic of
interest is that of convoy interaction. This can lead to
unsatisfied deadlines and/or other constraints which
in turn leads to backtracking and a ripple effect. Both
these characteristics suggest the use of local search.
6.2 Case for a Knowledgeable Heuristic
In figure 2 if the small but faster convoy is arriv-
ing a little later than the larger and slower convoy
then we would like to have the larger convoy wait for
the smaller convoy to crossover. We would like to
consider a heuristic that considers the convoy length,
speed and the time constraints associated with each
convoy. We would like to investigate whether a
heuristic can be formed for a dynamic scenario like
this which can take into point temporal constraints.
6.3 Complete Search in Split Planning
When dealing with goals that have deadlines, which
are common in this domain, the split planning ap-
proaching discussed in section 5 can fail to find a
suitable plan. This is because the second stage is al-
ready committed to certain routes, and a solution may
not exist for those routes. An interesting development
would be a backtracking feedback based planner. The
feedback can result in the plan from previous stage
begin altered according to the reason for failure.
7 CONCLUSIONS
In this paper we have looked at some of the prob-
lems that arise when we look at path finding and
scheduling of convoys when their length is significant
and modeled explicitly. We have experimented with
Sapa (Do and Kambhampati, 2003), Crikey (Coles
et al., 2009), LPG (Gerevini and Serina, 2002) and
LPG-td (Gerevini et al., 2006), an extension of LPG,
at various stages of model development. LPG-td per-
formed better than the other planners overall. By
splitting the problem into two stages and planning
separately we were able to improve scale and reduce
planning time. We plan to improve the system by
attempting to make it complete and also explore if
this methodology of split planning can be generalized
over multiple stages.
REFERENCES
Chardaire, P., McKeown, G. P., Verity-Harrison, S. A., and
Richardson, S. B. (2005). Solving a time-space net-
work formulation for the convoy movement problem.
Operations Research, 53(2):219–230.
Coles, A., Fox, M., Halsey, K., Long, D., and Smith, A.
(2009). Managing concurrency in temporal planning
using planner-scheduler interaction. Artificial Intelli-
gence, 173(1):1 – 44.
Do, M. B. and Kambhampati, S. (2003). Sapa: A multi-
objective metric temporal planner. Journal of Artifi-
cial Intelligence Research, 20:155–194.
Gerevini, A., Saetti, A., and Serina, I. (2006). An approach
to temporal planning and scheduling in domains with
predictable exogenous events. Journal of Artificial In-
telligence Research (JAIR), 25:187–231.
Gerevini, A. and Serina, I. (2002). Lpg: A planner based
on local search for planning graphs with action costs.
In International Conference on Automated Planning
and Scheduling/Artificial Intelligence Planning Sys-
tems, pages 13–22.
Goldstein, D., Shehab, T., Casse, J., and Lin, H.-C. (2010).
On the formulation and solution of the convoy routing
problem. Transportation Research Part E: Logistics
and Transportation Review, 46(4):520 – 533. Selected
papers from the Second National Urban Freight Con-
ference, Long Beach, California, December 2007.
Montana, D., Bidwell, G., Vidaver, G., and Herrero, J.
(1999). Scheduling and route selection for military
land moves using genetic algorithms. In Evolutionary
Computation, 1999. CEC 99. Proceedings of the 1999
Congress on, volume 2, pages 3 vol. (xxxvii+2348).
ICAART 2012 - International Conference on Agents and Artificial Intelligence
498
