
THE PRIZE-COLLECTING VEHICLE ROUTING PROBLEM WITH
NON-LINEAR COST
Integration of Subcontractors into Route Design of Small Package Shippers
Andreas Stenger
IT-based Logistics, Goethe University Frankfurt, Grueneburgplatz 1, 60323 Frankfurt, Germany
Keywords:
Vehicle routing, Prize-collecting, Subcontracting, Heuristic.
Abstract:
In this paper, we propose a new routing problem to model a highly relevant planning problem in small package
shipping. The problem, called Prize-Collecting Vehicle Routing Problem with Non-Linear cost (PCVRPNL),
allows for each customer the choice of being serviced by a vehicle of the private fleet or being outsourced to
a subcontractor. A lower bound on the total customer demand serviced by the private fleet ensures a constant
capacity utilization. The subcontracting costs follow a non-linear function representing the discount given
by a subcontractor if larger amounts of packages are assigned. To solve the NP-hard problem, we propose a
Variable Neighborhood Search algorithm. In numerical studies performed on benchmark instances adapted
from classical VRP, we demonstrate the strong performance of our algorithm and study the effect of different
cost functions on the routing solution.
1 INTRODUCTION
The market of small package shippers (SPS) drasti-
cally changed since the deregulation in EU as well as
in USA. The formerly big players like DHL
1
operated
a huge fleet of vehicles and performed all last-mile
deliveries by their own employees. However, rising
competition forces them to adapt the business model
of companies like DPD
2
, that use subcontractors for
the last-mile deliveries. Instead of high fixed costs in-
curred by vehicles or employees, they pay subcontrac-
tors per parcel delivered. Beside outsourcing of whole
delivery areas, subcontractors are often used on the
operational level to balance high demand fluctuations,
in particular when the capacity of the owned vehicles
is not sufficient to serve all customers on a given day.
On these days, the problem is to decide which cus-
tomers should be served by an own driver and which
customers should be subcontracted. Thus, a trade-off
between routing costs based on the solution of a Ve-
hicle Routing Problem (VRP) and the fixed costs for
subcontracting a customer have to be made. (Chu,
2005) modeled this planning problem, relaxing sev-
eral practical constraints, as an extension of the clas-
sical VRP, which was later named VRP with Private
1
www.dhl.com
2
www.dpd.com
Fleet and Common carriers (VRPPC) (Bolduc et al.,
2008).
However, the VRPPC disregards important real-
world characteristics. First, a lower bound of cus-
tomer served by the private fleet is mandatory in order
to maintain the profitability of the vehicle fleet. Sec-
ond, the costs charged by the subcontractor for serv-
ing an additional customer follow a non-linear cost
function, since the subcontractor itself tries to opti-
mize its capacity utilization.
In this paper, we contribute by modeling the real-
world planning task as a Prize-Collecting Vehicle
Routing Problem with Non-Linear costs (PCVRPNL)
extending the well-known Prize-Collecting Traveling
Salesman Problem (PCTSP). In a PCTSP, a prize is
collected when visiting a customer and penalty costs
incur for each unvisited customer. An additional con-
straint requires to collect at least a given prize. The
objective is to minimize the sum of distances traveled
and penalty costs for unvisited customers. In our case,
penalty cost are equal to subcontracting cost while at
least a given customers demand (prize) have to be ser-
viced by the private fleet. We generate a set of test in-
stances which we solve by means of a Variable Neigh-
borhood Search (VNS) algorithm. Furthermore, we
study the effect of different cost functions on the route
design and the subcontracting decisions as well as the
influence of the lower bound chosen for the customer
265
Stenger A..
THE PRIZE-COLLECTING VEHICLE ROUTING PROBLEM WITH NON-LINEAR COST - Integration of Subcontractors into Route Design of Small
Package Shippers.
DOI: 10.5220/0003740002650273
In Proceedings of the 1st International Conference on Operations Research and Enterprise Systems (ICORES-2012), pages 265-273
ISBN: 978-989-8425-97-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

assignment.
The remainder of our paper is structured as fol-
lows. In Section 2, we briefly review the literature
related to our work. Subsequently, we formulate the
PCVRP as an Integer Linear Program (ILP) in Section
3. The proposed VNS solution method is detailed in
Section 4. In Section 5, we present the computational
studies performed followed by some concluding re-
marks in Section 6.
2 LITERATURE REVIEW
In this section, we provide a brief review of literature
on PCTSP and VRPPC which are of importance for
our work.
The idea of prize-collecting first arised in the con-
text of the iron and steel industry. There, a PCTSP
was used to model the operational scheduling of a
steel rolling mill. (Balas, 1989) transferred this idea
to the general case of a traveling salesman and studied
structural properties. A traveling salesman collects a
prize for each city visited and has to pay a penalty for
each city that remains unvisited. The objective is to
minimize the total distance traveled and penalty costs
incurred for unvisited cities while collecting at least a
given amount of prize money. Several solution meth-
ods are proposed for the PCTSP in literature.
(Dell’Amico et al., 1998) presented a heuristic
that starts from solutions obtained by lagrangian re-
laxation. The subsequent improvement phase applies
an extension and collaborate procedure.
Recently, (Chaves and Lorena, 2008) proposed
a hybrid metaheuristic that generates initial solu-
tions by means of a combined greedy randomized
search procedure and VNS. Based on this, clusters are
formed and promising clusters are identified in order
to further improve those by a local search procedure.
However, no common benchmark set for PCTSP
exists so that the quality of the various solution meth-
ods proposed can not be evaluated straightforward.
For an extended literature review, we refer the
reader to (Feillet et al., 2005) who provide a classified
overview of literature on traveling salesman problems
with profits that also include the PCTSP.
In the context of iron and steel industry applica-
tions, (Tang and Wang, 2006) extended the PCTSP to
a prize-collecting vehicle routing problem (PCVRP)
in order to model the scheduling of a hot rolling mill.
Each customer represents an order to be scheduled
which has a given length that corresponds to the de-
mand of the customer. Each vehicle route describes a
turn whereby the vehicle capacity corresponds to the
maximum length of a turn. The objective is to find
the optimal schedule so as to minimize the production
costs while profits of orders are considered.
In the context of deliveries from warehouses to lo-
cal customers, (Chu, 2005) proposed a routing model
based on a VRP, in which a customer can either be
served by a truck of the privat fleet or outsourced to
a common carrier. While costs for deliveries per-
formed by a private truck depend on the distances
traveled plus fixed vehicle cost, a common carrier is
paid a fixed price per assigned customer. The ob-
jective is to minimize the total costs incorporating
fixed vehicle costs and variable travel costs of pri-
vate trucks as well as costs of assigning deliveries to
the common carrier. To solve this NP-hard problem
which was later named VRPPC (Bolduc et al., 2008),
(Chu, 2005) presented a simple heuristic based on
the well-known Clarke and Wright algorithm (Clarke
and Wright, 1964). Another simple heuristic that
outperforms the approach of (Chu, 2005) was devel-
oped by (Bolduc et al., 2007). (Bolduc et al., 2008)
modeled the VRPPC as heterogeneous VRP and
proposed a randomized construction-improvement-
perturbation heuristic. Furthermore, they generated
two large sets of benchmark instances for the VRPPC
with up to 480 customers, based on classical VRP
instances. Recently, two tabu search (TS) heuris-
tics have been developed for the VRPPC. (Cˆot´e and
Potvin, 2009) presented a heuristic which is mainly
based on the unified TS framework proposed by
(Cordeau et al., 1997) (?)see also¿Cordeau:2001. The
solutions obtained by this heuristic were further im-
proved by the TS of (Potvin and Naud, 2011) which
is enhanced by the concept of ejection chains. Nu-
merical studies show that ejection chains helped to
clearly improve the solution quality, in particular on
instances with heterogeneous vehicle fleet, but lead
also to a significantly increased computing time.
3 ILP FORMULATION OF THE
PCVRP
Adapting the VRPPC formulation of (Bolduc et al.,
2008), the PCVRPNL can be stated as follows. Given
an undirected graph with a vertex set V = {0...n} and
an arc set A. Vertex 0 denotes the depot and all other
vertices are customers with a demand of q
i
units. A
customer can either be serviced by a vehicle k of the
set of private vehicles K or by a subcontractor. The
private vehicle fleet consists of m identical vehicles
with restricted capacity Q. For each vehicle used fixed
costs f
k
are charged as well as variable costs c
ij
for
traversing edge (i, j).
Assigning a customer to a subcontractor incurs
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
266

non-linear cost consisting of a standard price p
i
which
is discounted by factor (1 − e). The price p
i
denotes
the cost charged if only customer i is assigned to the
subcontractor and e the discount factor. With growing
total demand delivered by the subcontractor, discount
factor e is increased following a stepwise function in
order to represent the situation in practice. At least L
demand units have to be delivered by the private fleet.
Furthermore, we use the following binary vari-
ables. Variable x
ijk
is equal to 1 if vehicle k uses
edge(i, j), otherwise 0, for i, j ∈ V, i 6= j and k ∈ K.
Variable y
ik
is set to 1 if vehicle k visits node i, oth-
erwise it is equal to 0, for i ∈ V, k ∈ K. The binary
variable z
i
takes value 1 if customer i is assigned to
a subcontractor, otherwise 0, for i ∈ V\{0}. Finally,
let u
ik
denote an upper bound on the load of vehicle
vehicle k upon leaving customer i for i ∈ V\{0} and
k ∈ K (Bolduc et al., 2008; Cˆot´e and Potvin, 2009).
min
m
∑
k=1
f
k
· y
0k
+
m
∑
k=1
n
∑
i=0
n
∑
j=0
j6=i
c
ij
· x
ijk
+ (1 − e) ·
n
∑
i=1
p
i
· z
i
(1)
m
∑
k=1
n
∑
j=1
x
0jk
=
m
∑
k=1
n
∑
i=1
x
i0k
≤ m (2)
n
∑
j=0
j6=h
x
hjk
=
n
∑
i=0
i6=h
x
ihk
= y
hk
, h ∈ V;k ∈ K (3)
m
∑
k=1
y
ik
+ z
i
= 1, i ∈ V\{0} (4)
n
∑
i=1
q
i
· y
ik
≤ Q, k ∈ K (5)
n
∑
i=1
m
∑
k=1
y
ik
· q
i
≥ L (6)
u
ik
− u
jk
+ Q · x
ijk
≤ Q− q
j
,
i, j ∈ V\{0};i 6= j;k ∈ K (7)
x
ijk
∈ {0,1};y
ik
∈ {0,1};z
i
∈ {0,1} (8)
u
ik
≥ 0, i ∈ V\{0},k ∈ K (9)
The objective function (1) minimizes the total ex-
penses of the SPS, involving fixed costs for vehicles
used, variable transportation cost as well as subcon-
tracting cost for outsourced customers. The number
of available vehicles of the private fleet is restricted
to m by Constraints (2), while Constraints (3) imply
that a customer vertex i has to be entered and left by
the same vehicle k. Constraints (4) ensure that each
customer is either served by the private fleet or a sub-
contractor. The maximum capacity of a vehicle of the
private fleet is limited to Q by Constraints (5). Con-
straint (6) specifies the minimum customer demand L
to be serviced by the privatefleet. Subtour elimination
constraints are given in Constraints (7). Finally, Con-
straints (8) define the binary nature of variable x
ijk
,
y
ik
and z
i
and Constraints (9) define the possible val-
ues for u
ik
.
The model differs from the VRPPC formulation
in the objective function (1), that includes the non-
linear subcontracting cost, and in Constraint (6), that
defines the minimum “prize” to be collected. In our
case, the prize corresponds to the demand serviced by
the private fleet.
4 SOLUTION METHOD FOR THE
PCVRP
The PCVRPNL is designed to model the real-world
route planning problem of an SPS. Since the prob-
lem is clearly NP-hard, only small instances can be
solved by an exact approach. In order to tackle large
real-world instances, we propose a VNS algorithm.
The algorithm is adapted from the AdaptiveVNS pro-
posed by (Stenger et al., 2011) for the Multi-Depot
VRPPC, where it has shown its high performance in
both solution quality and computing time.
In general, VNS, originally proposed by (Mlade-
novi´c and Hansen, 1997), is a metaheuristic that per-
forms local search on systematically changing, ran-
domly generated neighborhoods. In this way, a high
diversification is achieved which helps to efficiently
search for improving solutions. VNS is highly popu-
lar especially for tightly constraint and large routing
problems such as VRP with time windows (Br¨aysy,
2003) and large-scale VRP (Kyt¨ojoki et al., 2007).
In Figure 1, we provide a pseudocode of the basic
VNS algorithm as proposed by (Hansen and Mlade-
novi´c, 2001). In the initialization phase, a set of κ
neighborhood structures N
κ
has to be defined. After
finding an initial solution x the algorithm proceeds to
the shaking phase which is repeated until a stopping
criterion is met. In the shaking, starting from initial
solution x, a first neighboring solution x
′
is randomly
generated by using the neighborhood structure κ = 1.
Subsequently, a greedy local search is performed on
x
′
to determine the local minimum x
′′
. If the solution
x
′′
improves on the incumbent solution x, we replace
x by x
′′
and the shaking procedure restarts with x
′′
as
initial solution and neighborhood structure κ = 1. In
case x
′′
is worse than the initial solution x, the shak-
ing proceeds with x as starting point and uses now the
more distant neighborhood structure κ + 1. Typical
stopping criterions are a fixed number of iterations or
number of iterations without improvement.
THE PRIZE-COLLECTING VEHICLE ROUTING PROBLEM WITH NON-LINEAR COST - Integration of
Subcontractors into Route Design of Small Package Shippers
267

1: {Initialization}
2: Define neighborhood structures N
κ
with κ ∈ [1,..,κ
max
]
3: Find initial solution x
4: Set κ := 1
5: repeat
6: {Shaking}
7: Generate randomly x
′
∈ N
κ
(x)
8: {Local Search}
9: Find local optimum x
′′
with local search algorithm
starting from initial solution x
′
10: {Acceptance Decision}
11: if x
′′
improves x then
12: x ← x
′′
13: κ ← 1
14: else
15: κ ← κ+ 1
16: end if
17: until κ = κ
max
Figure 1: Pseudocode of the basic VNS algorithm as pro-
posed by (Mladenovi´c and Hansen, 1997).
In the following, we provide the algorithmic de-
tails of the initialization, shaking and local search
phases used in our VNS algorithm designed for the
PCVRPNL.
4.1 Initialization
The aim of the initialization phase is to quickly com-
pute a first feasible solution which serves as starting
point for the shaking phase. In detail, we need first to
assign all customers either to the private fleet or the
subcontractor and second to determine vehicle routes
for the private fleet.
Our approach is a modified version of the initial-
ization method proposed by (Cˆot´e and Potvin, 2009)
for the closely related VRPPC. In general, the idea
is to service not more than the mandatory demand L
by the private fleet and to subcontract all remaining
customers. In order to identify the most suitable cus-
tomers to be subcontracted, we start by ordering all
customers according to the quotient p
i
/q
i
in increas-
ing order, where p
i
denotes the subcontracting cost
of customer i and q
i
the demand. Subsequently, we
assign the first b customers to the subcontractor with
b
∑
i=1
q
i
≥
n
∑
i=1
q
i
− L ≥
b−1
∑
i=1
q
i
(10)
where L denotes the minimum customer demand to
be service by the private fleet (see Section 3). The
remaining customers are assigned to the private fleet
and initial vehicle routes are constructed by means of
the well-known Clarke and Wright algorithm (Clarke
and Wright, 1964). The routing is further improved
by a greedy local search that uses the neighborhoods
described in Section 4.3.
4.2 Shaking
Starting from an initial solution, the shaking proce-
dure randomly generates neighboring solutions based
on predefined neighborhood structures. We define
our neighborhood structures by means of a move-
exchange and a cyclic-exchange operator (Thompson
and Psaraftis, 1993). In both cases, we separate those
neighborhoodsthat only consider routes of the private
fleet and those that allow the exchange between routes
of the private fleet and the subcontractor. In detail, we
use the following neighborhood structures.
• Moving a sequence of customers among vehicle
routes of the private fleet: The first six neighbor-
hood structures (κ = 1,..., 6) move a sequence of
ω customers from one route into another. The se-
quence length ω to be exchanged on neighbor-
hood κ is randomly selected as min([0,κ], |N|),
where |N| denotes the number of customers in the
route.
• Moving a sequence of customers among vehi-
cle routes of the private fleet and subcontrac-
tor: The following six neighborhood structures
(κ = 7, ...,12) are similar to the first set, however,
customer sequences can additionally be inserted
into or removed from the subcontractor.
• Exchanging customer sequences among vehicle
routes of the private fleet: This set of neighbor-
hood structures transfers sequences of up to 6 cus-
tomers among up to 4 routes in a cyclic way. Con-
sidering an example with three routes, a customer
sequence is removed from route r
1
and inserted
into route r
2
where a sequence of customers is
extracted and moved to route r
3
. The sequence
removed from route r
3
is finally inserted into r
1
,
which closes the circle of exchange. Neighbor-
hood structures κ = 13,...,18 consider exchanges
among 2 routes, κ = 19,..., 24 exchanges among
3 routes and neighborhood structures κ = 25,...30
involve exchanges of up to 4 routes. The maxi-
mum sequence length to be exchanged increases
for each subset with increasing κ and the actual
length to be exchanged ω is randomly selected as
described in the first set.
• Exchanging customer sequences among vehicle
routes of the private fleet and the subcontractor
This set of 18 neighborhood structures is similar
to the third set but involves again not only vehicle
routes of the private fleet but also the subcontrac-
tor.
4.3 Local Search
Routes modified during the shaking phase are opti-
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
268

mized by a greedy local search to determine the local
optimum. On the single route level, we use the well-
known edge-exchange operators 2-opt and Or-opt. 2-
opt replaces two existing edges by two new ones (Lin,
1965) while Or-opt similarly substitutes three non-
consecutive edges without inverting any of the route
segments (Or, 1976). Considering exchanges among
different routes, we apply the relocate-exchange as
well as the swap-operator. In a relocate move, a single
customer is extracted from one route and inserted at
the cost-optimal position in another one. Given cus-
tomer a in route r
1
and customer b in route r
2
, the
swap-operator inserts customer b in r
1
at the former
position of a and customer a into r
2
at the former po-
sition of b.
In order to efficiently explore the solution space,
infeasible solutions are accepted during the search by
means of a penalty mechanism. In the case of the
PCVRPNL, a solution can be infeasible in terms of
violating capacity limits of vehicles and falling below
the minimum demand to be serviced by the private
fleet. Any violation is penalized by adding a penalty
term to the objective function. Let OverCap de-
note the overcapacity and LowPrize the demand units
required to satisfy the typical prize-collecting con-
straints. If a solution s is infeasible, we add to the ob-
jective function value c(s) a penalty term as follows:
f(s) = c(s) + α · OverCap + β · LowPrize. The vari-
ables α and β describe the penalty factors which are
positive weights in the interval [Pen
min
,Pen
max
]. Ini-
tialized with a value Pen
init
, we update these weights
after each iteration without violation (with violation)
of constraints by dividing (multiplying) by 1.5.
4.4 Acceptance Decision
The solution x
′′
obtained in the local search is com-
pared to the current best solution x and accepted ac-
cording to a given criterion. In standard VNS ap-
proaches, only improving solutions are accepted. Re-
cent works, however, show the high efficiency of us-
ing an acceptance criterion inspired by simulated an-
nealing (Hemmelmayr et al., 2009). In this case,
we still accept each move that improves the incum-
bent solution and additionally deterioating moves ac-
cording to the Metropolis probability. Let f(·) be
the objective function value and θ the temperature,
the probability of accepting solution x
′′
is equal to
e
−(C(x
′′
)−C(x))
θ
. The temperature parameter controls the
degree of the diversification achieved by accepting
worse solutions. Starting with an initial value θ
init
>
0, we constantly reduce the value by factor θ
dec
af-
ter each VNS iteration. In this way, the probability of
accepting a worsening solution decreases during the
search leading to an intensification phase at the end in
which all non-improving solutions are rejected.
5 COMPUTATIONAL STUDIES
We coded our VNS algorithm in Java and run all
tests as single thread on a standard personal computer
equipped with an Intel Core i5 Processor with 2.67
GHz and 4 GB RAM. Since the PCVRPNL is a new
problem class, we designed a set of benchmark in-
stances based on classical VRP ones which we use
for our numerical testings (Section 5.1). To study the
influence of the non-linear cost function on the sub-
contracting decision, we performed tests with differ-
ent cost functions, which we present in Section 5.2.
In Section 5.3, we analyze how the value of the mini-
mum demand to be delivered by the private fleet influ-
ences the overall solution. The general performance
of our VNS heuristic on related problems, such as
VRPPC, has already been proven in (Stenger et al.,
2011).
5.1 Benchmark Instances
The PCVRPNL is an extension of the classical VRP.
For this reason, we select the classical VRP instances
proposed by (Christofides and Eilon, 1969) as basis
for designing a new PCVRPNL benchmark set. The
benchmark design is inspired by the VRPPC instances
described in (Bolduc et al., 2008). Note that using the
VRPPC instances is not appropriate since the subcon-
tracting costs used there mainly depend on the cus-
tomers’ distance to the depot. In real-world small
package shipping, costs charged by a subcontractor
are, however, based on the demand of the customers.
The 14 newly designed instances consider up to
199 customers and are thus sufficiently large for our
studies. In detail, we keep the depot and customer
coordinates, the customer demand values as well as
the vehicle capacities of the original instances. We
add fixed vehicle cost f
k
which are highly relevant
for subcontracting decisions and computed the
standard subcontracting price p
i
for each customer.
Let C(x
∗
) be the objective function value and k
∗
denote the number of vehicles required of a very
good solution to the classical VRP instance (avail-
able on http://neumann.hec.ca/chairedistributique/
data/vrp/old/). The fixed usage cost of a vehicle k
is then computed as f
k
=
C(x
∗
)
k
∗
rounded down to the
nearest integer. The standard subcontracting price
of customer i is calculated as p
i
= q
i
·
( f
k
·k
∗
)+C(x
∗
)
˜q
,
where q
i
denotes the demand of customer i and
THE PRIZE-COLLECTING VEHICLE ROUTING PROBLEM WITH NON-LINEAR COST - Integration of
Subcontractors into Route Design of Small Package Shippers
269
˜q =
∑
n
i=1
q
i
the total demand of all customers of
the specific instance. Furthermore, we restrict the
number of vehicles available at the depot to k
∗
and set
the minimum demand to be served by the private fleet
L to 0.7˜q. Finally, we compute a simple upper bound
(UB) for our benchmark instances by adding the
vehicle fixed cost, calculated as described above, to
the current best known solution of the corresponding
VRP instance published in (Vidal et al., 2011).
In a preliminary testing on the benchmark set, we
identified the following parameter setting as the best
compromise between solution quality and computing
time. We start with an initial temperature of θ
init
= 50
and decrease it after each iteration by θ
dec
= 0.05%.
Furthermore, we reset the temperature to θ
init
every
time we performed 200 iterations without improve-
ment in order to force diversification. The penalty
factors OverCap and LowPrize are assigned an initial
value Pen
init
= 100 which is varied during the search
between Pen
min
= 1 and Pen
max
= 10000. We stop the
search after 1500 iterations without improvement.
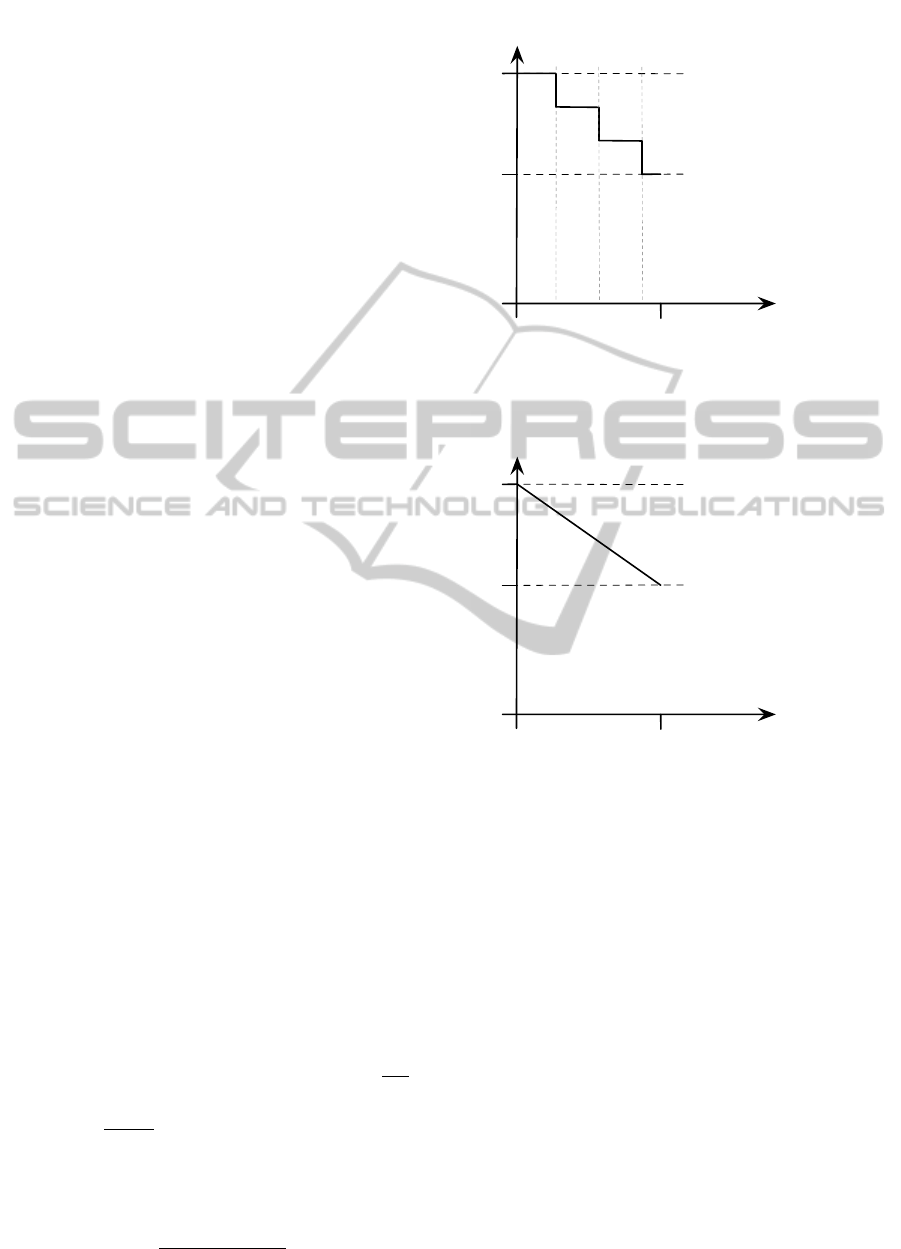
5.2 Cost Functions
In industry practice, a subcontractor is mainly paid
per package volume, i.e. demand unit, which an SPS
assigned to him. However, the price per demand unit
is usually not fixed but depends on the total subcon-
tracted demand. Subcontractors especially give dis-
counts if the demand to be delivered for an SPS fills
a whole vehicle. In that case, the delivery opera-
tions are most efficient. This fact is represented by
the common stepwise discount function of a subcon-
tractor which is depicted in Figure 2 tailored to our
PCVRPNL model. Given the standard price p
i
repre-
senting costs for solely subcontracting customer i, i.e.
discount factor e
min
= 0, the value of e is increased
every time the total demand assigned to the subcon-
tractor q
current
exceeds 80% of the vehicle capacity
Q. The discount factor e is limited to e
max
= 0.4,
i.e. a subcontractor gives at most a discount of 40%
with respect to the standard price. In our instances,
we link the discount factor e to the minimum de-
mand to be delivered by the private fleet L, such that
e reaches its maximum value at latest when the sub-
contracted demand is equal to ˜q − L. In detail, we
calculated the number of discount steps by ρ =
˜q−L
Q
rounded to the nearest integer. Factor e is hence in-
creased by γ ·
(1−0.6)
ρ
, with γ ∈ [1,ρ], if the subcon-
tracted demand exceeds ((γ − 1) + 0.8) · Q demand
units. In order to evaluate the effect of the stepwise
discount function, we additionally performed tests
on the benchmark instances with a linear discount
function (1− e
min
)+
(1−e
max
)−(1−e
min
)
˜q−L
·q
current
, where
1
0.6
0
0.8Q 1.8Q 2.8Q
q-L
~
Cost Factor
(1-e)
Subcontracted
Demand q
current
Figure 2: Stepwise discount function.
1
0.6
0
Cost Factor
(1-e)
q-L
~ Subcontracted
Demand q
current
Figure 3: Linear discount function.
q
current
denotes the currently subcontracted demand
(see Figure 3).
The results obtained with both discount functions
are reported in Table 1. In detail, we publish the best
solution found in 10 runs (Cost), the average comput-
ing time in seconds (CPU) and the average number of
subcontracted customers (|SC|). In addition, we com-
pare our solutions to the upper bound (UB) which is
computed as explained above.
For both discount functions, our solutions found
improve the VRP-based upper bound by more than
20% while requiring moderate computing times.
Since the value of the UB corresponds to the best
known solution of the specific instance without sub-
contracting, the impressive results show that our algo-
rithm is clearly able to identify those customers that
can be profitably subcontracted and to determine ve-
hicle routes at minimal cost. Comparing the solutions
obtained with the two different discount functions, the
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
270

Table 1: Results obtained on the benchmark instances for the PCVRPNL with a linear and a stepwise discount function.
The upper bound (UB) indicates the best known solution to the corresponding VRP instance, i.e., without subcontracting any
customer.
Linear Stepwise
Instance UB Cost GapUB CPU |SC| Cost GapUB CPU |SC|
CEP-01 1044.61 908.13 -13.07% 40.6 20.2 887.64 -15.03% 44.1 16
CEP-02 1660.26 1385.07 -16.58% 35.8 26.8 1356.62 -18.29% 49.5 20
CEP-03 1650.14 1354.51 -17.92% 145.2 41.8 1332.91 -19.22% 147.9 36
CEP-04 2048.42 1645.06 -19.69% 308.3 57.5 1608.23 -21.49% 294.6 51
CEP-05 2583.45 2141.27 -17.12% 340.2 70.5 2088.79 -19.15% 364.9 63.3
CEP-06 1107.43 872.48 -21.22% 37.0 20.5 846.71 -23.54% 46.4 15
CEP-07 1811.68 1466.35 -19.06% 37.6 27.2 1430.94 -21.02% 50.0 19.9
CEP-08 1729.94 1326.69 -23.31% 147.2 42.1 1306.56 -24.47% 168.1 35.5
CEP-09 2324.55 1734.84 -25.37% 440.5 50.8 1665.60 -28.35% 463.6 58.4
CEP-10 2781.85 2159.32 -22.38% 419.6 70.3 2127.98 -23.50% 312.5 63
CEP-11 2078.11 1792.83 -13.73% 305.8 30.7 1727.17 -16.89% 353.5 37.2
CEP-12 1629.56 1384.45 -15.04% 112.3 32.7 1359.10 -16.60% 120.9 26.2
CEP-13 3081.14 1881.07 -38.95% 432.4 37.8 1838.13 -40.34% 365.2 37
CEP-14 1724.37 1372.29 -20.42% 122.0 30.4 1353.61 -21.50% 104.3 25.6
average 1530.31 -20.27% 208.9 40.0 1495.00 -22.10% 206.1 36.0
gap to the UB of the stepwise discount function is al-
most 10% higher while 10% less customers are sub-
contracted. This can be explained by the fact that
the stepwise function reaches e
max
earlier, i.e. with
less subcontracted demand. In case of the linear func-
tion, increasing the subcontracted demand up to ˜q− L
might be always profitable since the discount factor
continuously increases.
5.3 Varying the Minimum Demand to
be Delivered by the Private Fleet
One of the main characteristics of prize-collecting
problems is the lower bound given to the prize to be
collected or, in our case, the minimum customer de-
mand L which has to be serviced by the private fleet.
Since the value of L strongly influences the outsourc-
ing decision, we performed tests with different val-
ues of L to quantify the effect on the overall solution
value.
In detail, we solved our benchmark instances us-
ing the standard subcontracting price p
i
without any
discount function, which is hence a PCVRP. The
value of L is varied between 0.5˜q and 0.9 ˜q while we
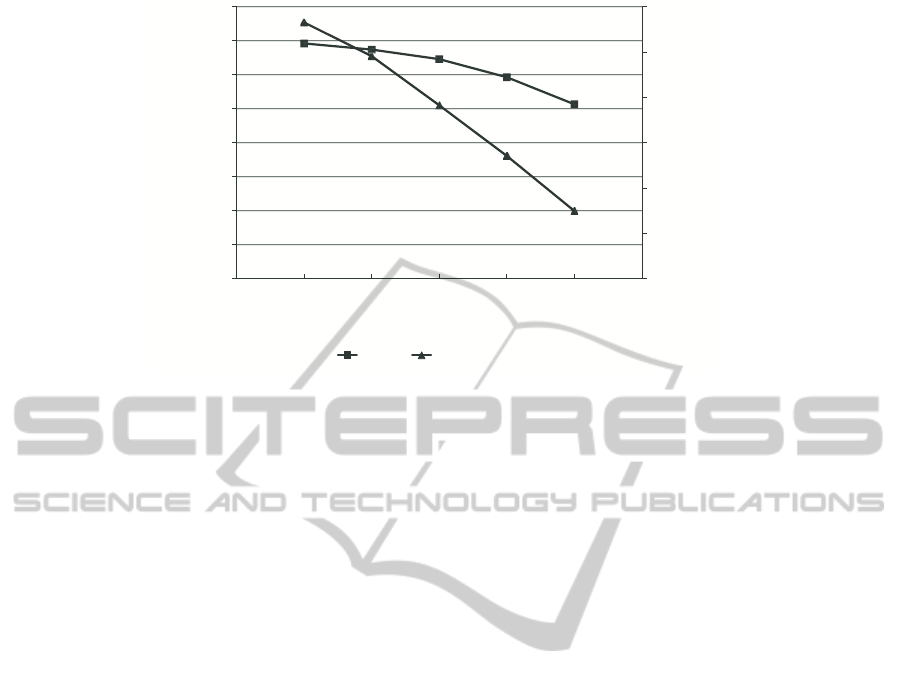
solved each instance 10 times with each value. Figure
4 depicts the average gap of the best solutions found
to the upper bound as well as the average number of
subcontracted customers for each value of
L
˜q
.
With increasing value of
L
˜q
and hence limited flex-
ibility of the algorithm, the solution quality clearly de-
creases. Similarly, the number of subcontracted cus-
tomers decreases when the minimum demand to be
serviced by the private fleet is increased. Comparing
the results obtained with
L
˜q
= 0.5 and 0.9, the num-
ber of subcontracted customers is decreased by almost
75% and the gap to the lower bound is 26% worse.
Although the findings of this study seem obvious, the
results quantify the strong influence of the important
real-world constraint that defines a lower bound on
the demand serviced by the private fleet. In addition,
the results prove again the high efficiency of our al-
gorithm in handling the subcontracting decision while
paying attention to the prize-collecting constraint.
6 CONCLUSIONS
In this paper, we proposed the Prize-Collecting
Vehicle Routing Problem with Non-Linear cost
(PCVRPNL) to model an important route planning
problem arising in small package shipping. The prob-
lem is closely related to the Prize-Collecting Trav-
eling Salesman Problem (PCTSP) and the Vehicle
Routing Problem with Private fleet and Common car-
rier (VRPPC). Given a single depot, a set of cus-
tomers with known demand and a homogeneous ve-
hicle fleet, the task is to find the vehicle routes for
the private fleet and to decide which customers to
be outsourced to a subcontractor incurring non-linear
cost depending on the total outsourced demand with
the objective of cost minimization. In order to solve
the NP-hard problem, we presented a Variable Neigh-
borhood Search (VNS) algorithm which has already
proven its high performance on related problems.
For the computational testing, we designed a set of
14 benchmark instances adapting classical VRP in-
stances. Numerical studies performed on the bench-
THE PRIZE-COLLECTING VEHICLE ROUTING PROBLEM WITH NON-LINEAR COST - Integration of
Subcontractors into Route Design of Small Package Shippers
271
0,0
5,0
10,0
15,0
20,0
25,0
30,0 -16,00%
-14,00%
-12,00%
-10,00%
-8,00%
-6,00%
-4,00%
-2,00%
0,00%
40% 50% 60% 70% 80% 90% 100%
Minimum Percentage of Demand
to be Serviced by Private Fleet
Average Number of
Subcontracted Customers
Average Gap to Upper Bound
Gap UB SC Customer
Figure 4: Comparing results obtained with different values of the lower bound L. Results show that reducing L leads to lower
total cost, i.e., to a larger gap to the upper bound and to a larger number of subcontracted customers.
mark instances clearly show that our algorithm is able
to efficiently solve the PCVRPNL. Furthermore, our
tests demonstrate the strong influence of the value
chosen for the minimum demand to be serviced by
the private fleet. In a next step, we aim to test our al-
gorithm on a large-scale benchmark set and to study
the multi-depot version of the problem at hand.
ACKNOWLEDGEMENTS
The author was partially supported by BMBF, Grant
01-S09016B, Germany. Thanks are due to Daniel En-
gel for his help in coding the algorithm.
REFERENCES
Balas, E. (1989). The prize collecting traveling salesman
problem. Networks, 19(6):621–636.
Bolduc, M.-C., Renaud, J., and Boctor, F. (2007). A heuris-
tic for the routing and carrier selection problem. Eu-
ropean Journal of Operational Research, 183(2):926–
932.
Bolduc, M.-C., Renaud, J., Boctor, F., and Laporte, G.
(2008). A perturbation metaheuristic for the vehicle
routing problem with private fleet and common car-
riers. Journal of the Operational Research Society,
59(6):776–787.
Br¨aysy, O. (2003). A reactive variable neighborhood search
for the vehicle routing problem with time windows.
INFORMS Journal on Computing, 15(4):347–368.
Chaves, A. A. and Lorena, L. A. N. (2008). Hybrid meta-
heuristic for the prize collecting travelling salesman
problem. In van Hemert, J. and Cotta, C., editors, Evo-
COP 2008. LNCS, vol. 4972. Springer, Heidelberg.
Christofides, N. and Eilon, S. (1969). An algorithm for one
vehicle-dispatching problem. Operational Research
Quarterly, 20(3):309–318.
Chu, C.-W. (2005). A heuristic algorithm for the truckload
and less-than-truckload problem. European Journal
of Operational Research, 165(3):657–667.
Clarke, G. and Wright, J. W. (1964). Scheduling of vehicles
from a central depot to a number of delivery points.
Operations Research, 12(4):568–581.
Cordeau, J.-F., Gendreau, M., and Laporte, G. (1997). A
tabu search heuristic for periodic and multi-depot ve-
hicle routing problems. Networks, 30(2):105–119.
Cˆot´e, J.-F. and Potvin, J.-Y. (2009). A tabu search heuristic
for the vehicle routing problem with private fleet and
common carrier. European Journal of Operational
Research, 198(2):464–469.
Dell’Amico, M., Maffioli, F., and Sciomachen, A. (1998). A
lagrangian heuristic for the prize collecting travelling
salesman problem. Annals of Operations Research,
81(0):289–305.
Feillet, D., Dejax, P., and Gendreau, M. (2005). Traveling
salesman problems with profits. Transportation Sci-
ence, 39(2):188–205.
Hansen, P. and Mladenovi´c, N. (2001). Variable neighbor-
hood search: Principles and applications. European
Journal of Operational Research, 130(3):449 – 467.
Hemmelmayr, V. C., Doerner, K. F., and Hartl, R. F. (2009).
A variable neighborhood search heuristic for periodic
routing problems. European Journal of Operational
Research, 195(3):791–802.
Kyt¨ojoki, J., Nuortio, T., Br¨aysy, O., and Gendreau, M.
(2007). An efficient variable neighborhood search
heuristic for very large scale vehicle routing problems.
Computers & Operations Research, 34:2743–2757.
Lin, S. (1965). Computer solutions to the traveling-
salesman problem. Bell System Technical Journal,
44(10):2245–2269.
Mladenovi´c, N. and Hansen, P. (1997). Variable neigh-
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
272

borhood search. Computers & Operations Research,
24(11):1097–1100.
Or, I. (1976). Traveling salesman-type problems and
their relation to the logistics of regional blood bank-
ing. PhD thesis, Department of Industrial Engineering
and Management Sciences, Northwestern University
Evanston, IL.
Potvin, J.-Y. and Naud, M.-A. (2011). Tabu search with
ejection chains for the vehicle routing problem with
private fleet and common carrier. Journal of the Op-
erational Research Society, 62(2):326–336.
Stenger, A., Vigo, D., Enz, S., and Schwind, M. (2011).
An adaptive variable neighborhood search algorithm
for a vehicle routing problem arising in small package
shipping. to appear in: Transportation Science.
Tang, L. and Wang, X. (2006). Iterated local search al-
gorithm based on very large-scale neighborhood for
prize-collecting vehicle routing problem. The Interna-
tional Journal of Advanced Manufacturing Technol-
ogy, 29(11-12):1246–1258.
Thompson, P. M. and Psaraftis, H. N. (1993). Cyclic trans-
fer algorithms for multivehicle routing and scheduling
problems. Operations Research, 41(5):935–946.
Vidal, T., Crainic, T. G., Gendreau, M., Lahrichi, N., and
Rei, W. (2011). A hybrid genetic algorithm for multi-
depot and periodic vehicle routing problems. Techni-
cal report, CIRRELT-2011-05.
THE PRIZE-COLLECTING VEHICLE ROUTING PROBLEM WITH NON-LINEAR COST - Integration of
Subcontractors into Route Design of Small Package Shippers
273
