
A LOCAL-GLOBAL MODEL FOR MULTIAGENT SYSTEMS
Sheaves on the Category MAS
Thomas Soboll
1
and Ulrike Golas
2
1
Fachbereich Computerwissenschaften, Universit¨at Salzburg, Salzburg, Austria
2
Konrad-Zuse-Zentrum f¨ur Informationstechnik Berlin, Berlin, Germany
Keywords:
Multiagent systems, Sheaves, Dynamic cooperation structures.
Abstract:
In multiagent systems, each agent has its own local view of the environment. Nevertheless, agents try to
cooperate to reach a common global goal. In this paper, we use a suitable Grothendieck topology and sheaves
to model the agents’ local data and their communication.
1 INTRODUCTION
Multiagent Systems (MASs) provide autonomous,
distributed, and flexible problem solving capabilities
for a wide field of problem areas. The present contri-
bution elaborates how sheaf theory can provide the
unification and abstraction to integrate cooperation
structure, agents’ local knowledge, and communica-
tion in a single model. The idea is to un-couple struc-
tural information and the agent’s knowledge. Struc-
tural information comprises of all kinds of relations
and cooperations between agents and is encoded in so
called base diagrams. An agent’s gathered knowledge
is then encoded in a sheaf over base diagrams.
This paper is organized as follows. In Section 2,
we describe the category MAS, introduce our running
example and some notions in sheafs. In Section 3, we
apply the construction of sheaves to MAS .
2 PRELIMINARIES
In this section, we introduce the category MAS , our
running example and some results for sheaves.
2.1 Base Diagrams
The category MAS (Pfalzgraf and Soboll, 2007) has
as objects base diagrams representing the current co-
operation structure of the underlying MAS, describ-
ing the agents, their properties and relationships. The
morphisms in this category are maps respecting the
structure of base diagrams. This is necessary to pre-
serve the relational information encoded in there. For
the remainder of this paper we use the following run-
ning example describing a set of agents that cooperate
to weld two cubes. The cubes are delivered to the as-
sembly agent by agents equipped with a gripper.
Agent Properties: Ap = {1, 2, 3}, agent is equipped
with (1) a welding device, (2) a gripper, (3) agent can
act as relay agent for communication. Arrow types:
At = {c, d, r} (c) communication channel, (d) deliv-
ery channel (dotted lines), (r) request channel.
In Fig. 1, the left hand side shows the actual
robots, while the underlying base diagram is depicted
on the right. Of the four robots, b, c, and d have a
gripper (2), b is also a relay agent (3), and a is an as-
sembly robot with a welding device (1). Agent b has a
delivery channel to agent a and agent a has open com-
munication channels to b and c. A MAS morphism F
is depicted in Fig. 2. F is the obvious inclusion map,
where the communication channels, the arrow types,
as well as the object types are preserved.
Actions: The action types Act = {idle, wf r, weld, ed}
define of possible actions: Type 1 (welding agent) can
execute weld or idle. Type 2 (gripper agent) can exe-
cute wf r (wait for resources, if no cubes are available)
or idle, and it can set an outgoing delivery channel to
ed (execute delivery) or idle. Type 3 (relay agent)
can only execute idle, but may act as a relay agent for
communication and requests.
B
a
1
b
2,3
c
2
d
2
d
c
c
Figure 1: Example of a base diagram.
331
Soboll T. and Golas U..
A LOCAL-GLOBAL MODEL FOR MULTIAGENT SYSTEMS - Sheaves on the Category MAS.
DOI: 10.5220/0003742103310334
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 331-334
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
a
1
b
2,3
c
2
c
c
a
1,3
b
2,3
c
2
d
2
c
c
d
d
F
Figure 2: MAS morphism.
2.2 Applied Notions and Notations
Here we summarize notions, notations, and results
from sheaf-theory (MacLane and Moerdijk, 1994;
Kashiwara and Schapira, 2006). We will use these
and want to introduce them here in an informal,
(hopefully) intuitive and motivating manner.
Given some domain of (distributed) entities, like
agents, a sheaf is a mathematical device providing the
means to collate local information stored or gathered
by each entity/agent in the system to a global view, if
the junks of local information agree in overlapping ar-
eas. A presheaf is a very similar thing, but presheaves
do not require the local observations to be collate-able
to a unique global view, whereas sheaves do.
To be able to formalize the notion of overlapping
areas we need some notions of intersection, union
and covering, which are provided by a Grothendieck
Topology (GT) of base diagrams. Given some base
diagram B, we construct a subcategory Sub(B) which
is a collection of sub-diagrams of B together with as-
sociated inclusions. In this category we define what it
means that a selection of sub-base diagrams covers B.
Informally, this is the case if the union of a selection
of sub-base diagrams results in B, using a GT.
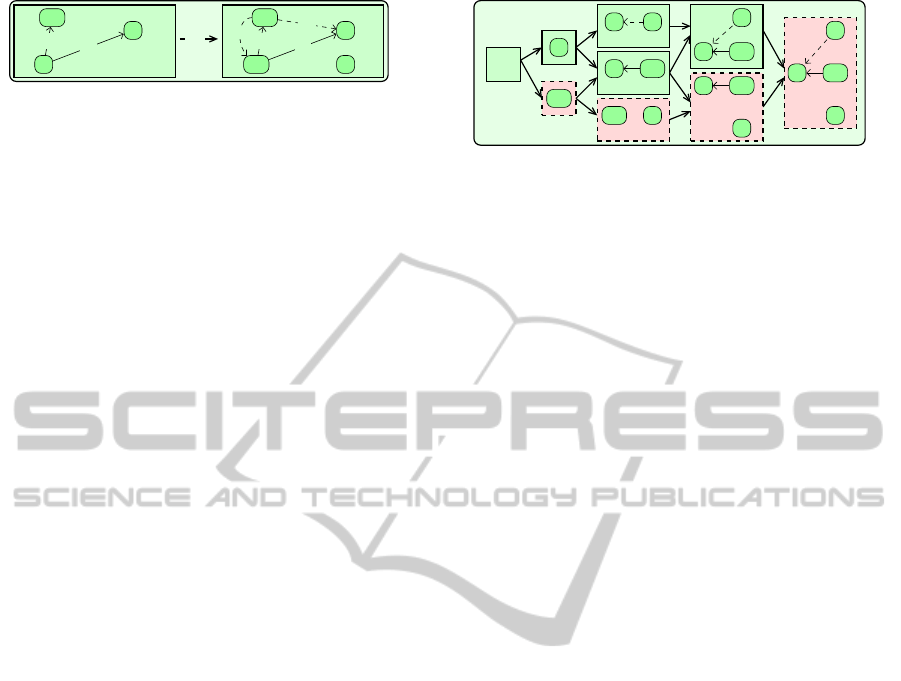
Example 1. In Fig. 3, a subcategorySub(B) is shown,
where the base diagram B is depicted as the right-
most object. Bold arrows define the morphisms in
Sub(B). We can observe that the set of inclusion mor-
phisms { 11, 12}, {7, 8}, and {9, 10} cover B, S
4
, and
S
5
respectively. On the other hand, the inclusions
{4, 5} do not cover S
2
because the arrow is missing.
Given a sheaf F on Sub(B), holding the observa-
tion gathered by the agents in B, for every subsystem
S of Sub(B), F(S) holds all the information gathered
or stored in S. We can perform a restriction of F to
S denoted by F|
S
, which is again a sheaf defined on
Sub(S). A sub-sheaf of F on Sub(B) is simply a sheaf
F
′
on Sub(B) such that the information stored in F
′
is
a subset of the information in F for every subsystem.
For a presheaf of observations, where for some or
all observations there is no unique collation, we can
perform sheafification. This operation provides for
any presheaf P the “best” sheaf F you can get from
P. F is obtained by identifying things that have the
same restrictions and then adding in all the things that
can be patched together (Mumford, 1999).
∅
c
2,3
a
1
S
3
c
2,3
d
2
S
2
a
1
c
2,3
S
1
a
1
b
2
S
4
a
1
c
2,3
b
2
S
5
a
1
d
2
c
2,3
B
a
1
c
2,3
b
2
d
2
1
2
3
4
5
6
10
9
8
7
12
11
Figure 3: Example of a subcategory Sub(B).
A very important notion is the gluing of sheaves.
The main idea is that for sheaves, i.e.knowledge on
different subsystems, where we explicitly allow inter-
sections, we can collate the observations to a single
sheaf if the corresponding “local” sheaves agree in
the overlaps. This means that the restrictions of the
“local” sheaves of the different subsystems to the in-
tersection of the subsystems need to be equal.
Example 2. Given the discrete topology on a set of
agents Ag, for any subset U ⊂ Ag the actual action
assignments f : U → Act of the agents can be deter-
mined locally. For V ⊂ U, the restriction of f to V,
denoted as f|
V
:V → Act is the action assignment for
the agents in V, this is a passage from global to local.
3 SHEAVES ON MAS
In this section, we apply the sheaf concepts to our
base diagrams. Note that we allow in our running ex-
ample that some arrows (here of type d) get actions
assigned (ed and idle). Such arrows will be called ac-
tion arrows (aA). For the other arrow types we do not
introduce actions, because they do not influence the
agent’s knowledge in its local view.
We define the (pre)sheaves representing the
agent’s knowledge as a functor P : Sub(B)
op
→ SET .
For all objects C of Sub(B), P(C) consists of a fam-
ily of maps defined by P(C) = { f
i
: Ag(C) ∪Aa(C) →
Act}, where Ag(C) are the agents in C, Aa(C) are the
action arrows in C, Act is the set of actions and each
map f
i
∈ P(C) assigns to every agent and action ar-
row a single action of the set Act. Loosely speaking,
each f
i
represents a possible world compatible with
the agents sensor and/or communication information.
3.1 Agent View
Each agent has sensors to allocate information in its
environment, where the reading of each sensor results
in a certain base diagram. We assume that an agent
is capable of sensing the types of the agents and their
identity and has knowledge about actions associated
to these types. A suitable combination of all sensor
information of an agent leads to its local view.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
332
Sub(E
a
)
∅
a
1
Ea
3
Ea
1
a
1
c
2,3
Ea
2
a
1
b
2
E
a
a
1
c
2,3
b
2
Figure 4: Env./Subcat. for agent a.
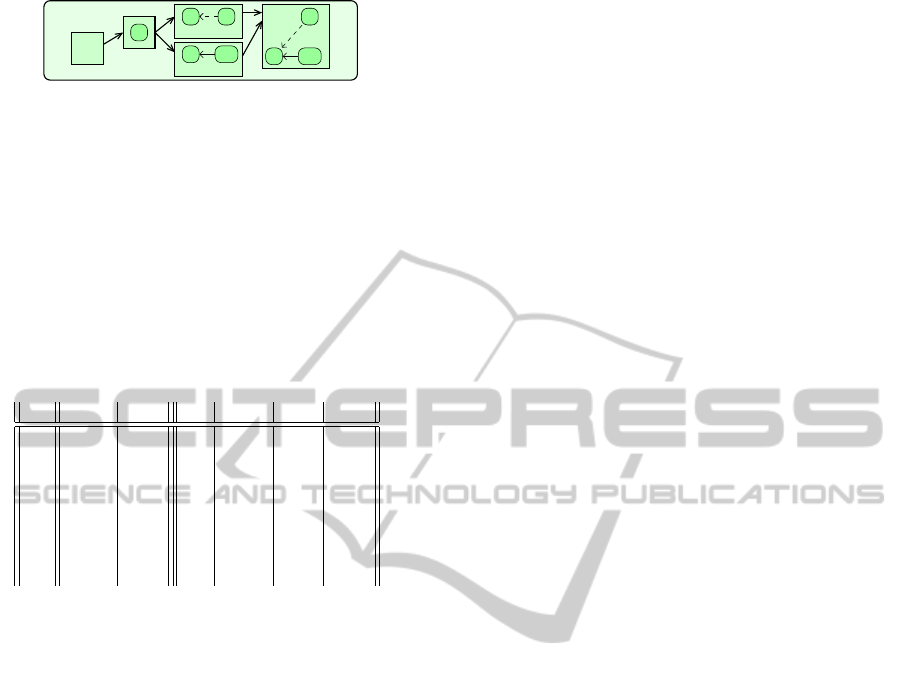
Definition 1 (Agent Environment). Given an agent
a with n sensors, each sensor i ∈ 1, 2, ..., n samples
an environment Ea
i
, where at least a is present. The
agent environment E
a
of a is the union of all environ-
ments Ea
1
, ..., Ea
n
.
Example 3. Suppose agent a is equipped with two
sensors which sample the environments Ea
1
and Ea
2
.
The agent environment E
a
is obtained by the union of
Ea
1
and Ea
2
(see Sub(E
a
) in Fig. 4).
Table 1: Example: Type sensor readings.
t
1
a c t
2
a b 99K
f idle wfr j idle wfr ed
g idle idle k idle idle ed
h weld wfr l weld wfr ed
i weld idle m weld idle ed
o idle wfr idle
p idle idle idle
q weld wfr idle
r weld idle idle
We distinguish type-sensors and action-sensors.
This distinction is necessary to apply adequate “glu-
ing” operations to collate the agent’s knowledge.
Type sensors collect type information, which allows
an agent to deduce the possible actions the agents in
its environment may execute. Action-sensors on the
other hand capture observed actions. The combina-
tion of the sampled information provides the building
block for local knowledge or the agent view.
Type sampling. For every agent i, we construct the
presheaf Pr
i
: Sub(E
i
)
op
→ SET representing the in-
formation gathered by sensors observing type infor-
mation. Initially, Pr
i
is the functor assigning to each
object in Sub(E
i
) the empty set and to the empty
base diagram the singleton containing the empty map
only (which is a terminal object in SET). For every
type-sensor, the sensor reading contains type informa-
tion and results in a set of maps of the environment
E
s
∈ Sub(E
i
). It is joined with the already available
information in Pr
i
(E
s
) and propagated into the sub-
environments of E
s
by restriction. By sheafification
of Pr
i
we construct the sheaf T
i
.
Example 4. Let Pr
a
: Sub(E
a
)
op
→ SET be the ini-
tial presheaf. Agent a has two type sensors t
1
, t
2
sam-
pling the environments Ea
1
, Ea
2
(see Fig. 4). The
reading of t
1
in Ea
1
is “agent a has type 1 and agent
c has type 2,3”. From this, agent a deduces four pos-
sible action assignment maps f, g, h, i in Ea
1
. The
reading of t
2
in Ea
2
is “agent a has type 1 and agent
b has type 2” and a delivery channel is recognized.
This leads to eight possible action assignment maps
j, k, l, m, o, p, q, r in Ea
2
(see Table 1).
We update Pr
a
(Ea
1
) to Pr
a
(Ea
1
) ∪ { f, g, h, i} and
Pr
a
(Ea
2
) to Pr
a
(Ea
2
) ∪ { j, k, l, m, o, p, q, r}. More-
over, Pr
a
(Ea
3
) with inclusions into Ea
1
and Ea
2
is updated. The sheafification of Pr gives the
sheaf T
a
with T
a
(Ea) = { f j, fk, g j, gk, hl, hm, il, im,
fo, f p, go, gp, ho, hp, io, ip} (see Table 2).
Action Sampling. For a set of action-sensors {s
j
| j =
1, ..., k}, each sampling actions in a sub-environment
E
j
of E
i
of agent i, we interpret the sensor reading as
a sheaf Si
j
on Sub(E
j
).
Example 5. Assume agent a has two action sensors
as
1
and as
3
sampling Ea
1
and Ea
3
such that the read-
ing of as
1
results in the map a
1
: {a, c} → Act with
a
1
(a) = idle, a
1
(c) = wfr and the reading of as
3
is
the map a
3
: {a} → Act with a
3
(a) = idle. Note that
the restrictions of these maps result in sheaves Sa
1
and Sa
2
, respectively.
Collating Type and Action Information. We col-
late the type information in T
i
and the action informa-
tion in Si
1
, ..., Si
k
leading to the sheaf P
i
: Sub(E
i
)
op
→
SET by gluing sheaves.
Example 6. Given the sheaves T
a
, Sa
1
, and Sa
2
from
Ex. 4 and 5, we construct the sheaf P
a
by gluing the
maximal sub-sheaf T
′
a
. P
a
(E
a
) = { f j, fk, fo, f p} (see
Table 2). Including additional information that the
agent has, e.g. that the delivery channel is in state ed,
leads to only four possible action assignment maps in
P
a
(E
a
) = { f j, fk}; for the sake of simplicity we will
assume this for the remainder of the paper.
Assume that agent c is waiting for resources, a
local view P
c
evaluated at E
c
for c is then given by
P
c
(E
c
) = { fh, fi, gh, gi} as depicted in the right hand
side of Table 2.
Definition 2 (Agent View). The agent view of agent
i is the sheaf P
i
: Sub(E
i
)
op
→ SET. If the agent view
P
i
exists, i.e. the sensor information of i’s different ac-
tion sensors agree in the overlaps, we call the agent
view (locally) consistent.
3.2 Communication
Each communication arrow means that agents com-
municate selected information. Restrictions and sub-
sheaveswill be used for selecting specific information
that shall be communicated. The collation of commu-
nication content is similar to the way sensor informa-
tion was collated to form the agent view.
Definition 3 (Communication). Given the agent
views P
i
and P
k
on Sub(E
i
) and Sub(E
k
), respectively,
A LOCAL-GLOBAL MODEL FOR MULTIAGENT SYSTEMS - Sheaves on the Category MAS
333

Table 2: Examples: Value of the sheaf T
a
at E
a
, P
a
at E
a
(bold) and P
c
at E
c
.
T
a
(E
a
) a b c 99K a b c 99K
fj idle wfr wfr ed hl weld wfr wfr ed
fk idle idle wfr ed hm weld idle wfr ed
gj idle wfr idle ed il weld wfr idle ed
gk idle idle idle ed im weld idle idle ed
fo idle wfr wfr idle ho weld wfr wfr idle
fp idle idle wfr idle hp weld idle wfr idle
go idle wfr idle idle io weld wfr idle idle
gp idle idle idle idle ip weld idle idle idle
P
c
(E
c
) a c d
fh idle wfr idle
fi weld wfr idle
gh idle wfr wfr
gi weld wfr wfr
and a communication arrow from agent k to agent i in
the environment of k. k selects a sub-sheaf K of a re-
striction E
′
k
of its environment and sends it to agent i, i
computes the union of the environments E
i
and E
′
k
de-
noted asC
i,k
and called communication-environment.
Agent i computes the maximal sub-sheaves K
′
and P
′
i
of the communicated sheaf K and its agent view P
i
,
respectively, such that K
′
and P
′
i
can be glued to the
sheaf Comm
i,k
: Sub(C
i,k
)
op
→ SET. Comm
i,k
holds
the information of agent i including the communi-
cated knowledge of agent k.
Definition 4 (Communication Consistency). Given
communication arrows from agents a
1
, ..., a
n
to an
agent i. We call the communication consistent if for
all sheaves Comm
i,a
1
, ..., Comm
i,a
n
there exist sub-
sheaves Comm
′
i,a
1
, ..., Comm
′
i,a
n
that can be glued to
form the sheaf Comm
i
on the union C
i
of all C
i,a1
to
C
i,an
holding all information available to agent i.
Table 3: Example: Value of sheaf Comm
a
at C
a
.
Comm
a
(C
a
) a b c d 99K
fjfh idle wfr wfr idle ed
fjgh idle wfr wfr wfr ed
fkfh idle idle wfr idle ed
fkgh idle idle wfr wfr ed
Example 7. Assume agent c communicates its en-
tire agent view P
c
to agent a. The resulting sheaf
representing agent a’s knowledge including commu-
nication is Comm
a
= Comm
a,c
on C
a
depicted by
the dashed elements in Fig. 3, since c is the only
agent communicating to a. This is a sheaf in case
the local observations of a and c are not contra-
dictory. In Ex. 6, 6 we have defined the sheaves
P
a
, P
c
with P
a
(E
a
) = { f j, fk, fo, f p} and P
c
(E
c
) =
{ fh, fi, gh, gi} . P
′
a
with P
′
a
(E
a
) = { f j, fk, fo, f p}
and P
′
c
with P
′
c
(E
c
) = { fh, gh} are compatible lead-
ing to the gluing sheaf Comm
a
: Sub(C
a
)
op
→ SET .
It represents the observation of a including the com-
municated data, where Comm
a
(C
a
) := { f j fh, f jgh,
fk fh, fkgh, fofh, fogh, f p fh, f pgh} (see Table 3).
P
i
and Comm
i
on Sub(E
i
) and Sub(C
i
), respec-
tively, describe the knowledge available to agent i lo-
cally without and with communication. During the
construction of Comm
i
specific maps can be elimi-
nated (by building a subsheaf of P
i
) using the addi-
tional information available to the agent. The elimina-
tion of maps by building sub-sheaves reduces the set
of possible worlds, and hence this is in fact a method
to gain knowledge rather than to loose it.
4 CONCLUSIONS AND
OUTLOOK
We have demonstrated how sheaves can be applied to
model local-global dependencies within a Multiagent
System based on structural information of its base di-
agram and using a suitable Grothendieck topology for
MAS. Sheaves allow us to collate the local obser-
vations through communication for a “wider” view
of a single agent and to construct group knowledge.
The sheaf model implicitly checks for inconsistency
in overlapping observations.
Future work includes the integration of coopera-
tion rules describing rule-based changes of the base
diagrams. The possible worlds that are generated by
the sheaves represent an agent’s knowledge, where
based on this information it can decide whether and
how to execute specific cooperation rules. As a next
step, one could include additional information like
more specific resource data in the model by including
resources as agent properties or by defining additional
sheaves representing the distribution of resources.
REFERENCES
Kashiwara, M. and Schapira, P. (2006). Categories and
Sheaves, volume 332 of Grundlehren der Mathema-
tischen Wissenschaften. Springer.
MacLane, S. and Moerdijk, I. (1994). Sheaves in Geome-
try and Logic: A First Introduction to Topos Theory.
Springer. Corrected ed.
Mumford, D. (1999). The Red Book of Varieties and
Schemes. Springer. 2nd exp. ed.
Pfalzgraf, J. and Soboll, T. (2007). On a General Notion of
Transformation for Multiagent Systems. In Proceed-
ings of IDPT ’07. SDPS.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
334
