
LANDMARK-BASED CAR NAVIGATION WITH OVERTAKE
CAPABILITY IN MULTI-AGENT ENVIRONMENTS
Sirvan Khalighi
1
, Somayeh Maabi
1
, Mercedeh Sanjabi
1
and Ali Jahanian
2
1
Department of Electronic and Computer Eng., Islamic Azad University, Qazvin Branch, Qazvin, Iran
2
Department of Electronic and Computer Eng., Shahid Beheshti University, Tehran, Iran
Keywords: Landmark-based car navigation, Wireless sensor networks (WSN), Multi-agent environment.
Abstract: Intelligent car navigation systems are planned to assist humans and route them automatically in the roads
with sufficient security and correctness. Landmark-based car navigation is a widely used technique in
automotive and robot navigation. In this paper, we improved a wireless landmark-based car navigation
(WLCN) algorithm to operate in multi-agent (MA) environments. The extended navigation algorithm allows
the cars to overtake in uni-directional real roads. Overtaking is based on the information which the cars send
to each other in the road. According to this information and using a related algorithm, cars traverse each
other. Analysis of accuracy and efficiency in various states, real-time RISC-based embedded system
especially for high speed movements in real roads show that, the cars are navigated easily and reliable in
multi-agent environments and they can successfully do overtake. In addition to reliable navigating,
calculation cost of the algorithm is acceptable for real world scenarios.
1 INTRODUCTION
Automatic car navigation (ACN) system is regarded
as one of the best kinds of offering solutions in
intelligent transportation systems (ITS). The ACN
systems are capable of doing some of the tasks
(reading the maps, determining the best routes and
etc.), that were performed by the driver. Recently,
GPS and digital road maps are used for land vehicle
navigation systems. The main drawback of using
GPS is false positioning, due to the imprecise
receivers and outdated maps. Therefore, GPS need
more complicated map matching algorithms to state
the vehicle location and navigation (Taghipour,
Taghipour, 2008), which lonely can't be reliable for
ACN. Most of the recent ACN algorithms are based
on machine vision and artificial intelligence
algorithms such as ant colony, neural network and
etc. (Yashikawa, Otani, 2010). (Wu et al., 2009)
developed some prototypes for landmark-based car
navigation using a full windshield head-up display
(FWD) system. They used computer vision methods
to correct distortion of FWD projection on the
windshield. (Yashikawa, Otani, 2010) obtained a
new routing algorithm to route on a graph
embedding of the map. They proposed a combined
method that integrates Tabu search and Ant colony
optimization. This hybrid technique could find the
shortest route when the blind alley existed in the
map. Their searching algorithm is comparable with
Dijkstra algorithm; But Dijkstra algorithm may not
be the best solution for drivers because each driver
has own definition in choosing the best route.
Furthermore genetic algorithm is widely used to
solve routing search and optimization problems.
Kim (Kim et al., 2009) considered the multi-
objective mathematical formulation for ACN
systems in real roads. Their method searched the
road's map to solve the problem that involves the
fuel cost in traffic congestion, the regulation of
traffic, and the weather, etc. Hashing method was
used to have a suitable selection in multi objectives
route problems. In another work (Taghipour,
Taghipour, 2008), proposed a correct mapping from
GPS on the road network parameters. Their results
show that the proposed algorithms can be effectively
used for map matching. The algorithm used only
location of the vehicle and vehicle speed information
and database of the road network. Another car
navigation system which communicated with each
other through wireless LAN was developed by
(Hiraishi et al., 1999). The system used the traffic
information from the other vehicles to perform the
234
Khalighi S., Maabi S., Sanjabi M. and Jahanian A..
LANDMARK-BASED CAR NAVIGATION WITH OVERTAKE CAPABILITY IN MULTI-AGENT ENVIRONMENTS.
DOI: 10.5220/0003752502340239
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 234-239
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
time-constrained search dynamically, yielding that
the system can generate a new route to avoid the
congestion. Significant developments and technical
trends in the area of navigation systems were
reviewed by (Hasan et al., 2009). They evaluated
integration systems for obtaining a reliable and
accurate navigation solution.
Analysis of previous works show the vision methods
are more complex and time consume thus they are
not suitable enough for real time systems. In this
situation, other options such as GPS, digital roads
and landmark-based maps should be explored. In
addition, using new communicating technologies
such as Zigbee, Wi-Fi and Wi-Max enables efficient
inter-communication in a multi-agent environment.
(Sanjabi et al., 2009) obtained a landmark-based car
navigation algorithm to route cars in the roads which
are equipped with Wi-Fi landmarks. A map
matching method has been used for navigating in the
roads without branches. The nearest visited
landmark was selected as free line. The next position
will be chosen with arithmetic formulas on this free
line. In another work we (Sanjabi et al., 2009)
discussed on navigating in multi branches routes.
Every branch has its group landmarks, hence the
route will be chosen according to its group
landmarks IDs and car will be navigated in this route
to reach the destination.
2 WIRELESS LANDMARKS
To make correct decisions during the agent’s
movement, agents need to know their location in the
environment (e.g. localization). Therefore, agents
must recognize the landmarks and communicate
with them to read their internal information. To
communicate between cars, there are many ways
such as vision, sensor, wireless and etc. But in this
project, due to the reasons which will mention in the
following, just wireless landmarks have been used
for navigating the agents: I) Wireless landmarks can
be detected in high speed movement with low
degree of error. II) In the recent years, wireless
technology is dramatically improved, and many
cost-effective wireless technologies (Wi-Fi, Zigbee
and Wi-Max) have been commercially available. III)
Information of wireless landmarks does not require
any pre-processing such as other kind of signal
processing. IV) Wireless landmarks make a new
framework to construct a large sensor network in
roads to navigate the cars. However, wireless
technology consists of a variety of standards such as
IEEE 802.1 (Zigbee), IEEE 802.2 (Bluetooth), IEEE
802.3 (Wi-Fi), IEEE 802.4 (Wi-Max) and some
other emerging technologies such as cognitive radio.
Due to significant features in terms of power
consumption and maximum coverage area, Wi-Fi
technology has been considered as wireless
landmarks. Furthermore, the coverage area of a Wi-
Fi landmark is about 50m, which is sufficient for
ACN (IEEE 802 standard, 2007), (the IEEE 802.11
protocol, 2008).
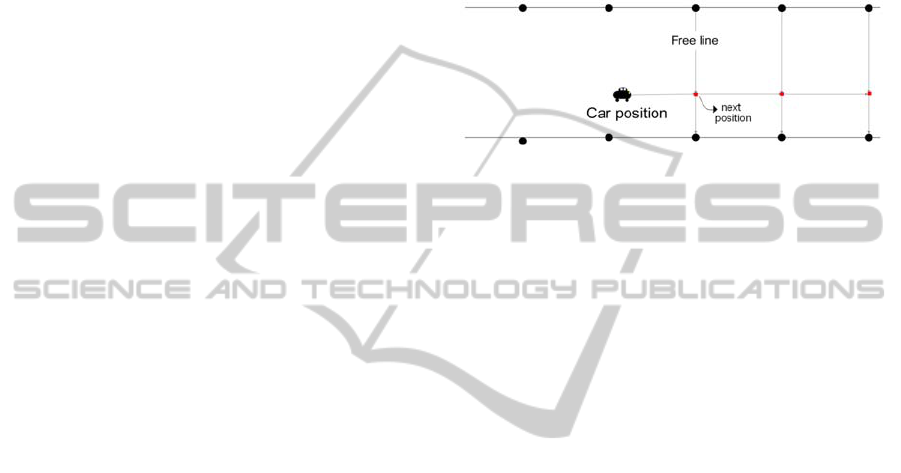
Figure 1: Place of landmarks in a road.
3 ACN USING WIRELESS
LANDMARKS
To navigate the cars in multi agent environment an
improvement of the WLCN algorithm (Sanjabi,
2009) is proposed. For each car, a Wi-Fi transceiver
which broadcasts the car’s position and receives the
location of the other landmarks is considered. There
are two types of wireless landmarks: Moving
landmarks are the cars and fixed landmarks are the
landmarks on two sides of the road (Figure 1). Due
to distance limitation of wireless applications,
Landmarks are assumed as Wi-Fi nodes (Wireless
local networking, 2008). The maximum distance
between each two Wi-Fi landmarks is a critical
parameter. The suitable distance between landmarks
will be evaluated in Section 5. Each Wi-Fi node
propagated two essential data: A unique ID and the
position of the node. When an agent reaches to a
landmark covered domain, its ID and position will
be visible by the moving agent. This information is
used to localize the agent and navigate it along the
road (Figure 2). The domain of each node maybe
overlapped with the other nodes depending on the
distance between the Wi-Fi nodes. As will be seen in
the succeeding sections, the overlapping area has
direct impact on the navigation algorithm.
4 WLCN-MA ALGORITHM
An algorithm is proposed to navigate the cars in a
multi-agent road where two sides of the road are
equipped with Wi-Fi sensors. The algorithm is
LANDMARK-BASED CAR NAVIGATION WITH OVERTAKE CAPABILITY IN MULTI-AGENT ENVIRONMENTS
235

Figure 2: Covering domain of each sensor node.
named wireless landmark-based car navigation in
multi-agent roads (WLCN-MA).It summarized in
the flowchart which is shown in Figure 3. More
details of each step will be described in the
following.
4.1 Inputs of WLCN-MA algorithm
Inputs of the proposed algorithm consist of four
parameters:
List of landmarks: The landmarks data extract
from the various maps and then save as a text file (It
is named file1). The algorithm reads the files and
extracts the required data.
Other cars information: There is another file
which contains information for navigating of the
other cars that is generated in the road (It is named
file2). This information will be used in overtaking
algorithm. In addition, the other cars are separately
navigated in the same map and their situation in each
time slot is dumped into a file. This file is used as
another input given to the WLCN-MA algorithm.
First position of car: Initial location of the car
at start of the road.
End points of the route: End of the route is the
position of two last landmarks which will be visible
at the end of the route. Obviously, the algorithm will
stop when visit them and process their data.
As summarized in Algorithm 1, WLCN-MA
algorithm initialized using the start position of the
agent in the route. In each iteration of the algorithm,
percepts (location of the landmarks) are extracted
from the environment (e.g. from input file). Current
map of the road is updated based on visited percepts.
Then, if there is a car in front of us (near than 50m),
ACN system decides to do overtake; Otherwise, a
free line (Figure 1) between the last visited percepts
is constructed.
Figure 3: Flowchart of WLCN-MA algorithm.
Algorithm 1: WLCN-MA
1. Read the start position.
2. While (TRUE)
3. P
n
= Get percept.
4. Update map.
5. If existing car in front of us then
(a) Decide to overtake,
(b) Do overtake.
else
Find free line.
[End of If structure]
6. Select the best next position (NP).
7. Move to new position.
8. If (NP is the end of route) then
Finish.
[End of If structure]
[End of While structure]
[End of WLCN-MA]
Figure 4: Select position based on a geometrical method.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
236

A
lgorithm 2: Overtaking
1. Give the cars position.
2. Decrease our car speed.
3. Call Free-line algorithm.
4. Select new position in 1/4 right side of read.
5. Call Free-line algorithm.
6. Select new position in 1/2 right side of read.
7. Increase our car speed.
8. While (our distance is less than 30m)
Call Free-line algorithm.
Select new position in 3/4 right side of read.
[End of While structure]
9. Call Free-line algorithm.
10. Select new position in 1/2 right side of read.
11. Call Free-line algorithm.
12. Select new position in 1/4 right side of read.
13. Return to main algorithm.
[End of Overtaking]
A
lgorithm 3: Free-line
1. P
n
= Get percept.
2. Update map.
3. Find free line.
4. Return Free-line.
[End of Free-line]
After estimating the free line, the best point of the
free line is selected as the candidate point for the
next position of the car according to the distance
formula (1) (figure 4).
()( )
22
21 21
dxx yy=−+−
(1)
Finally, the next point is calculated and the current
position of the agent will be updated. If the new
current position is on the free line between the last
landmarks (end of the route), the algorithm is
finished. Otherwise, the algorithm goes ahead to get
the next percepts from the input file. As it can be
seen from the figure 4, the center of the circle is
right landmark of free line and its radius is d/4
where d denotes the road width. This crossing leads
to two positions but one point which is inside of the
road is the next position. It is worthwhile to consider
some criteria points in the selection of suitable next
position. The proposed algorithm can be easily
modified to consider any new metric.
The overtaking Algorithm: As it is shown in
the Figure 5-(a) and summarized in the algorithm 2,
algorithm 3, when one car (the red car) with lower
speed and inadequate distance, is visited in front of
our position (the white car), the main algorithm
decides to do overtake. Therefore, the car's speed is
decreased down to the front car’s speed (the red car),
then the car's movement is continued for one step in
1/4 right side of the road, where step means passing
states of get percept, update map, find free line and
(a)
(b)
Figure 5: (a) Steps of overtake process, (b) Overtake steps
(backing).
finally select next position. Then, the car must go to
1/2 and more to 3/4 from right side of the road in
two steps. After increasing our speed for passing the
front car, we regularly check our distance with the
red car by calling a move function. A move function
compares current time with the existing times in the
file2 and finds the closest time to extract the red
car’s position. This process is for simulating
concurrent movement of two cars. Then distance of
two cars calculates with the distance formula (1). If
we passed the red car with a suitable distance, we
back to 1/4 right side of the road, otherwise,
remaining in 3/4 one with passing just one step. For
checking the distance we need to know passed time
according to movement. This time is calculated by
=/
(2)
Where V, X and T denote the car's speed, car's
movement and current time respectively, and then is
fed into the move function (V is assumed as fixed
value). To finish the overtaking process, the distance
of our car and the red car is needed to be known.
Thus, distance of two cars calculates using move
function and the distance formula (1). For backing,
the car first goes to 1/2 and then 1/4 from right side
of road with passing two steps. The algorithm will
be finished if new position is located on or after the
end point of the route which is extracted (algorithm
2) (Figure 5-(b)).
5 EXPERIMENTAL RESULTS
The WLCN-MA algorithm has been implemented
LANDMARK-BASED CAR NAVIGATION WITH OVERTAKE CAPABILITY IN MULTI-AGENT ENVIRONMENTS
237

Table 1: Experimental results in terms of error rate.
Benchmark
map
Visible
landmarks
NP
deviation
D
Error rate
(%)
1
16 0 16 0%
2
16 2 16 2%
3
16 1.5 16 1.5%
4
16 0.5 16 0.5%
Average 16 2 16 2%
on a MIPS-based embedded system to evaluate the
algorithm in real world conditions. Algorithm was
developed in C programming language and
compiled on MIPS architecture using a standard gcc
cross-compiler with optimization level O3. The
algorithm is evaluated with five road maps that are
extracted from the real maps.
Table 1 shows the experimental results of
different maps in terms of error rate. These maps are
shown in Figures 6, 7. The column of visible
landmarks shows the average number of visited
landmarks. Column NP deviation represents the
average deviation of calculated next position and
ideal position for the car. It is noted that the error-
free position is calculated manually to compute the
error rate. Furthermore Column D shows the length
of the free line and finally, the column Error rate
shows the deviation of estimated route in percent. As
can be seen from Table 1, the average number of
visible landmarks is almost 16. As the number of
visible landmarks increases, the reliability of the
method improves. Therefore, we need to choose
appropriate distance between the landmarks. The
minimum visible landmarks that are needed to
navigate are two, but some other problems such as
effect of noise, car speed, Wi-Fi limitations or even
road conditions enforce to require more than 2
landmarks in each step. The results of implementing
the WLCN-MA algorithm on MIPS-based
embedded system are shown in the Table 2. In this
table, Frequency’s column shows the operational
frequency of embedded system and Landmark
distance’s column shows the average distance
between landmarks. Column Total runtime shows
Table 2: Experimental results in terms of allowable
maximum speed.
Frequency
Landmark
distance
Total
runtime
Step
runtime
Max. possible
speed
(m/s)
300 MHZ
10 13.3 ms 4 ms 250
300 MHZ
20 13.3 ms 4 ms 500
300 MHZ
30 13.3 ms 4 ms 600
100 MHZ
10 40 ms 12 ms 83.33
100 MHZ
20 40 ms 12 ms 166.66
100 MHZ
30 40 ms 12 ms 250
Figure 6: The road No. 1 (first benchmark in Table 1).
Figure 7: The road No.2 (second benchmark in Table 1).
the total time needed for navigating the agent from
start to end of the path and Step runtime represents
the runtime for one step of the algorithm. And
finally, the column Maximum possible speed
represents the maximum speed of each car during
the navigation process. Experiments are performed
on all benchmarks with three different landmark
distances and three various operational frequencies.
As can be seen in this table, the WLCN-MA
algorithm can be used in high speeds with accessible
frequencies and very small error rate because of its
light computations.
6 CONCLUSIONS
This paper improved the pervious car navigation
algorithm based on the landmarks to work in multi-
agent environments. In fact, the overtaking
capability was the main improvement of it. Decision
of the overtaking is according to cars transactions
with each other. The experimental results show that
the proposed algorithm can be used for real-time and
high-speed agents even in low operational
frequencies. As future research, we are going to
ICAART 2012 - International Conference on Agents and Artificial Intelligence
238

consider other moving agents as obstacles using
more intelligent algorithms.
REFERENCES
A technical tutorial on the IEEE 802.11 protocol,
Available on htt://sss-mag.com/pdf/802_11tut.pdf,
2008.
Apolloni B., et. al, October 2005. Machine learning and
robot perception, Springer.
Hasan A. M., Samsudin Khairulmizam, Ramli Abd
Rahman, Azmir Raja Syamsul, and Ismaeel Salam A.,
2009. A review of navigation systems (Integration and
Algorithms), Australian Journal of Basic and Applied
Sciences, pp: 943-959
Hiraishi Hironori, Ohwada Hayato and Mizoguchi Fuinio,
1999. Intercommunicating car navigation system with
dynamic route finding, International Conference on
Intelligent Transportation Systems, pp: 284-289
"IEEE 802 standard," Available on http: //en.wikipedia.org
/wiki/ IEEE_802, 2007.
Kim Byung-Ki, Jo Jung-Bok, Kim Jong-Ryul and Gen
Mitsuo, 2009. Optimal route search in car navigation
systems by multi-objective genetic algorithms,
International Journal of Information Systems for
Logistics and Management, Vol. 4, No. 2, pp: 9-18
Olson C. F., 2002. Selecting landmarks for localization in
natural terrain, In Autonomous Robots Manufactured
in the Netherlands
Sanjabi M., Maabi S., Jahanian A. and Khalighi S., 2009.
A light-weight car navigation algorithm for high speed
agents using wireless landmarks, IEEE International
Conference on Information and Automation, pp: 1028
- 1033
Sanjabi M., Maabi S., Esmaeili Z., Jahanian A. and
Khalighi S., 2009. A landmark based navigation
system for high speed cars in the roads with branches,
International Journal of Information Acquisition, Vol.
6, No. 3
Taghipour Sara, Taghipour Ali, April 2008. An algorithm
for map matching for car navigation system, The
International Conference on Information &
Communication Technologies, pp: 7-11
Wu Wen, Blaicher Fabian, Yang Jie, Seder Thomas, Cui
Dehua, 2009. A prototype of landmark based car
navigation using a full windshield head up display
system, Workshop on Ambient media computing
"Wireless local networking based on 802.11standards,"
Available on http: //www.Wi-fi.org, 2008.
Yoshikawa Masaya, Otani Kazuo, 2010. Ant colony
optimization routing algorithm with Tabu search,
Directory of open access journals, pp: 2104-2107,
VOL. 2182
LANDMARK-BASED CAR NAVIGATION WITH OVERTAKE CAPABILITY IN MULTI-AGENT ENVIRONMENTS
239
