
SIMULATING KNOWLEDGE AND INFORMATION IN
PEDESTRIAN EGRESS
Kyle Feuz
1,2
and Vicki Allan
3
1
Computer Science, Utah State University, Logan, Utah, U.S.A.
2
Electrical Engineering and Computer Science, Washington State University, Pullman, Washington, U.S.A.
3
Computer Science, Utah State University, Logan, Utah, U.S.A.
Keywords:
Reinforcement-learning, Pedestrian simulation, Egress assistance, Congestion, Multi-agent systems.
Abstract:
Accurate pedestrian simulation is a difficult yet important task. One of the main challenges with pedestrian
simulation is providing the simulated pedestrians with appropriate amounts of route knowledge to be used in
the route selection algorithm. In this paper, we propose a novel use of reinforcement learning as a means to
represent different amounts of route knowledge. Using this techniques we show the impact learning about
route distances and average route congestion levels has upon the egress time of pedestrians. We also look at
the effect that dynamic congestion information has upon the efficiency of pedestrian egress.
1 INTRODUCTION
In recent years, pedestrian simulation has become an
important research topic (Santos and Aguirre, 2004;
Pan, 2006; Helbing and Johansson, 2009). Pedes-
trian simulation models are useful in the design of
safe facilities, validation of fire codes, and automatic
tracking and surveillance of pedestrians in live video
feeds (Antonini et al., 2006). An important area of
pedestrian simulation is the route selection algorithm.
Most route selection algorithms either assume per-
fect knowledge of egress routes or they assume no
prior knowledge of the egress routes. While com-
mon, these methods are not an accurate representation
of pedestrian knowledge. Rarely would a pedestrian
have complete route knowledge, yet, having no prior
route knowledge is also unrealistic for most cases.
A few simulators allow route knowledge to be en-
tered manually by the user to simulate different route
knowledge for different pedestrians (Gwynne et al.,
2001; PTV AG, 2011), which may require a large
time commitment by the user to properly set up the
environment. We propose a novel application of rein-
forcement learning to provide pedestrians with indi-
vidualized knowledge of the building without requir-
ing a large time commitment from the user. Pedestri-
ans can learn about the environment in an initial learn-
ing phase, and then the actual simulation is run with
different pedestrians having learned various routes.
Another factor which can affect route selection is
congestion. The use of reinforcement learning to sup-
ply pedestrian agents with prior knowledge about the
building can be extended to include the average con-
gestion levels of the different routes. Using this tech-
nique, we can analyze the effect that utilizing con-
gestion knowledge has upon the egress time and effi-
ciency of the simulation. In traffic management, stud-
ies conflict as to whether or not providing dynamic
information about traffic congestion conditions im-
proves the efficiency of the road network. Some stud-
ies indicate that providing such information can lead
to road usage oscillation patterns as drivers switch be-
tween two alternate routes (Wahle et al., 2002). The
question of the effectiveness of providing congestion
information has yet to be answered regarding pedes-
trian egress. The effect of learning typical conges-
tions levels in a building prior to the actual simulation
is also unanswered. We fill these gaps by analyzing
the effect of incorporating dynamic route congestion
information and learned route congestion information
into the route selection algorithm.
2 RELATED WORK
Reinforcement learning has been studied extensively
for several decades (Kaelbling et al., 1996). Differ-
ent algorithms and techniques have been developed,
each with benefits and drawbacks. In general, re-
246
Feuz K. and Allan V..
SIMULATING KNOWLEDGE AND INFORMATION IN PEDESTRIAN EGRESS.
DOI: 10.5220/0003755202460253
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 246-253
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

inforcement learning algorithms can be divided into
two broad categories: model-free learning and model-
based learning. The main difference between these
two techniques is that in model-based learning, an
agent learns about both the transition relationship be-
tween states and the reward function, whereas in a
model-free technique, an agent only learns about the
reward function. For a good survey of reinforcement
learning algorithms, consult (Kaelbling et al., 1996).
The effects of dynamic congestion information in
traffic management is a well-studied topic which has
not yet received much attention in pedestrian situa-
tions. Dia provides a framework for simulating driver
behavior with dynamic route information. He leaves
as an open question what effect such information
will actually have upon route selection behavior (Dia,
2002). Wahle et al. study the effect of dynamic con-
gestion information in traffic scenarios(Wahle et al.,
2002). They use simulation models to predicate the
effect that different congestion messages will have
upon traffic congestion. Their findings indicate that
the results are dependent upon the type of informa-
tion provided, but in general, dynamic information
tends to decrease the overall network efficiency as os-
cillation patterns of road usage develop. Roughgar-
den shows that selfish routing does not minimize the
total latency of a network and provides bounds upon
the cost of selfish routing for several different latency
functions and network topologies(Roughgarden and
Tardos, 2002). However, using game-theory, Helbing
et al. discover the emergence of alternating coopera-
tion as a fair and system-optimal road usage behavior
in a route choice game (Helbing et al., 2005). They
conduct empirical tests using an iterated 2-4 player
route choice game. Cooperation tends to emerge
when individuals also exhibit exploratory behavior.
They do not consider the case of providing dynamic
information about the road conditions.
Although dynamic congestion information has not
been heavily applied to pedestrian simulation, sev-
eral researchers have included congestion consider-
ation while modeling pedestrian egress. The work
of Hoogendoorn and Bovy includes the cost of con-
gestion when selecting routes and activities to per-
form(Hoogendoorn and Bovy, 2004). The congestion
information can either be derived from the pedestri-
ans current perceptions or it can be based upon fu-
ture predictions of congestion levels. How this infor-
mation affects the overall efficiency of the system is
not discussed. Banerjee et al consider the complex-
ity issues of dynamically discovering congestion and
rerouting agents accordingly(Banerjee et al., 2008).
Their model assumes complete route distance infor-
mation is known to pedestrians and that only pedes-
trians which perceive the congestion will choose new
routes. This is in contrast to our model where route
information may not be known and where congestion
may be known or estimated from previous experience
even when the actual congestion cannot be directly
perceived.
Pan represents one of the more comprehensive
pedestrian behavioral models (Pan, 2006). He in-
cludes pedestrian characteristics such as competi-
tive, leader-following, altruistic, queuing, and herd-
ing. Using these characteristics, an agent consid-
ers visible routes before identifying its currently pre-
ferred route. Similarly, Koh, Lin, and Zhou (Koh
et al., 2008) define an agent which only considers
congestion and obstructions which can be directly
perceived by the agent. However, knowledge of the
location of the end goals appears to be available to
all pedestrians. A common simulation environment,
buildingEXODUS, assumes the agents know about a
set of user specified routes or all routes in the absence
of the specification (Gwynne et al., 2001). VISSIM,
a commercially available pedestrian simulator, first
processes the building layout to generate perfect route
information for the pedestrians (PTV AG, 2011). In
VISSIM, the user also has the option of specifying
specific routes for specific pedestrian sets (PTV AG,
2011).
3 SIMULATION ENVIRONMENT
Our study is performed using the Pedestrian Leader-
ship and Egress Assistance Simulation Environment
(PLEASE) (Feuz, 2011). PLEASE is built upon the
multi-agent modeling paradigm where each pedes-
trian is represented as an individually rational agent
capable of perceiving the environment and reacting to
it. In PLEASE, pedestrian agents can perceive obsta-
cles, hazards, routes, and other agents. The agents
are capable of basic communication to allow for the
formation and dissolution of coalitions and the shar-
ing of knowledge. The agents use a two tier naviga-
tional module to control their movement within the
simulation environment. The high-level tier evaluates
available routes and selects a destination goal. The
low-level tier, based on the social force model (Hel-
bing and Johansson, 2009), performs basic navigation
and collision avoidance.
Typically, reinforcement learning algorithms are
used to discover a near-optimal policy. In fact, many
reinforcement learning algorithms provably converge
to the optimal policy (Kaelbling et al., 1996). One
benefit of reinforcement learning to our simulation
is the fact that when the search is truncated, a less
SIMULATING KNOWLEDGE AND INFORMATION IN PEDESTRIAN EGRESS
247

than perfect solution is found. These solutions can
be used to automatically generate various levels of
pedestrian knowledge about the building configura-
tion. These sub-optimal policies do have a unique
constraint though as well: they must still be realis-
tic. A learned policy which (when followed) never
results in the successful egress of the agent is unac-
ceptable. For this reason, we have implemented the
reinforcement learning algorithm using model-based
techniques. The details of the implementation follow.
Each agent builds a model of the building lay-
out and the associated costs of available routes. To
do this, the agent abstracts the building layout into a
graph-based view. A common abstraction of building
layouts is to represent rooms as nodes in the graph and
doorways between rooms as edges in the graph. For
the purpose of reinforcement learning, however, this
abstraction is too course-grained. An agent is forced
to associate a single cost (the edge weight) between
two arbitrary, connected rooms. The true cost actu-
ally varies significantly depending upon the agent’s
location in the room. If time and space considera-
tion are ignored, the building can be discretized into
arbitrarily small grid cells, which allows the cost be-
tween nodes to be represented more accurately. Of
course, this method is too costly in terms of time and
space to be practical for buildings of even modest size.
PLEASE uses a building representation in between
these two extremes. To do this, we introduce the con-
cept of decision points. A decision point is simply a
point in the building at which an agent must decide
in which direction he will proceed. These points may
be placed at any arbitrary location, but in our mod-
els, the decision points are always placed at doorways
and corridor intersections. We select these locations
because they are areas which pedestrian must pass
through to move from one area of the building to an-
other. This prevents the systems from forcing a partic-
ular path upon an agent. The nodes in the graph rep-
resent decision points in the building, and weighted
edges between nodes represent the average cost of a
path between two decision points. This provides more
fine-grained control over the costs learned while still
being manageable for larger buildings.
Pseudo-code for the learning algorithm is shown
in Figure 1. Initially, the agent’s model is empty as
the agent has no prior knowledge about the build-
ing. Each time an agent passes through a decision
point, the agent estimates the cost (based upon dis-
tance and/or congestion levels) to all other visible de-
cision points in the room. (See Formula 1-3). Ad-
ditionally, the agent estimates the cost to other de-
cision points known by the agent to be in the room.
The weighted edge between decision points is then
updated to reflect the newly estimated costs. Deci-
sion points which are not currently represented in the
graph are added as necessary.
Definitions:
model - the adjacency matrix for the building layout
representation
d - the decision point whose cost is being updated
d p - decision points in the same room as d
al pha - learning parameter of the algorithm, deter-
mines the weight applied to new cost estimates
estimateCost - estimates the cost between two deci-
sion points. See Formula 1 - 3
model.insert - inserts new rows and columns into the
adjacency matrix as needed
Begin UpdateCost(DecisionPoint d)
foreach DecisionPoint dp in room
if dp isVisible or isKnown
cost = estimateCost(d, dp)
if d, dp in model
tmp = alpha * (cost - model[d][dp])
model[d][dp] += tmp
model[dp][d] += tmp
else
model.insert(d,dp,cost)
End
Figure 1: Algorithm used by the learning agent to update
the estimated cost between decision points.
The agents estimate the cost from one point in
the building (d p1) to another point in the building
(d p2) based upon the distance and congestion lev-
els between the two points. This estimate is speci-
fied by Formulas 1-3, where cost is the estimated cost
of moving from d p1 to d p2, w
cg
is the user-specified
weight for congestion costs, w
d
is the user-specified
weight for distance costs, sp
i
is the desired speed of
the current pedestrian i, sp
j
is the current speed of
agent j, n
d p1,d p2
is the number of agents along the
path from d p1 to d p2, N is the total number of agents,
s
1
is 1 if sp
j
< sp
i
and 0 otherwise, dist(d p1, d p2) is
the distance between d p1 and d p2, and maxDistance
is the maximum distance between any two connected
decision points which is defined as the length of the
diagonal of the building.
Both the distance cost and the congestion cost are
weighted by user-specified parameters so that differ-
ent relative weights can be chosen. Agents in the sim-
ulation are able to accurately estimate the distance to
visible points within the simulation model as well as
being able to estimate the distance to points which
they have previously visited. The distance is normal-
ized using the maximum distance between two points
on the simulation map. The congestion cost is es-
timated using the difference in speeds between the
ICAART 2012 - International Conference on Agents and Artificial Intelligence
248

current pedestrian and other pedestrians that exist be-
tween the two points in the building. For each pedes-
trian along the selected route, if its speed is slower
than the desired speed of the pedestrian, then a cost is
incurred relative to the speed difference. The cost is
raised to the square so that smaller speed differences
count less than larger differences. Finally, the result is
normalized by the worst-case cost (i.e. if every pedes-
trian in the simulation was along the selected route
and was not moving).
DistCost =
w
d
∗ dist(d p1, d p2)
(maxDistance)
(1)
CongCost = w
cg
∗
n
d p1,d p2
∑
j=0
((sp
i
− sp
j
) ∗ s
1
)
2
sp
i
∗ N
(2)
cost = CongCost + DistCost (3)
At this point, the agent must select the next route
to follow. Pseudo-code for the route selection algo-
rithm is shown in Figure 2. To do this, the agent per-
forms a breath-first search starting from each known
decision point (d p) in the current room. If a path is
found from the decision point to an end goal (g), the
cost of the path is computed as the cost to d p plus
the learned cost from d p to g. If no path is found
to g, then the cost is computed as the cost of d plus
UNEXPLORED COST . UNEXPLORED COST is
a user-specified parameter representing the cost of
choosing a route whose destination is not known.
With probability p, the agent selects a random de-
cision point to proceed towards, and with a proba-
bility of 1 − p, the agent selects the decision point
of least cost. The probability factor represent the
probability an agent chooses to explore a different
route. When the agent is learning we set this prob-
ability to 0.15. This value will reflect the speed with
which agents learn a building. When learning conges-
tion cost, this value will also affect the reliability of
the learned congestion costs. Agent training happens
concurrently for all agents in the simulation. This cre-
ates a moving-target problem because congestion lev-
els are constantly fluctuating as agents change their
respective policies based upon the congestion levels
encountered previously. When the probability of ex-
ploring is high, a large number of agents will not be
using routes they normally would if they were not ex-
ploring which leads to inaccurately learned conges-
tion costs.
Definitions:
d p - decision point in the current room to considera-
tion
explore - normally distributed random value between
0-1
p - probability of exploration
cost - dictionary of costs for decision points consid-
ered
estimateCostTo(dp) - similar to estimateCost in Fig-
ure 1 but uses the agents position as dp1
BFSCost(d p) - the cost found by performing a
breadth-first search from d p to the end goal
Begin routeSelection()
foreach DecisionPoint dp in room
cost[dp] = estimateCostTo(dp) + BFSCost(dp)
explore random()
if explore <= p
return random DecisionPoint in room
else
return arg min cost[dp]
End
Figure 2: Algorithm used by the agent to select the desired
route of travel.
4 CONGESTION
CONSIDERATIONS
As we are interested in the effects of congestion on
the egress efficiency of the system, we consider the
two cases: 1) ignore current congestion levels and 2)
adjust decisions based on directly perceived conges-
tion.
We use the case of ignoring congestion as a base
case against which we can compare all other cases.
For many situations, we expect that completely ignor-
ing congestion will lead to slower egress times as the
building corridors are used inefficiently. However, ig-
noring congestion is still a feasible pedestrian behav-
ior. Generally, pedestrians prefer to travel along paths
they have previously traveled(Ozel, 2001). This may
mean that, in spite of congestion, they continue to
travel along their preferred route. Congestion might
also be ignored if the pedestrian believes that other
routes will not decrease their egress time.
Adjusting to directly perceivable congestion is
common in many simulation models (Koh et al.,
2008; Hoogendoorn and Bovy, 2004). Intuitively, it
makes sense that pedestrians adjust their route based
upon perceived congestion. From a modeling per-
spective, this case has the additional benefit of not re-
quiring any additional knowledge about congestion in
other areas of the building. The question remaining
is, ”Does it improve the overall egress times?”
SIMULATING KNOWLEDGE AND INFORMATION IN PEDESTRIAN EGRESS
249

5 KNOWLEDGE
CONSIDERATIONS
We are interested not only in the effect of reacting
to congestion upon egress times, but also in the ef-
fect congestion knowledge has upon egress times. We
consider three types of knowledge which pedestri-
ans may have: 1) learned route distance knowledge
2) learned route congestion/distance knowledge, 3)
system-provide route congestion/distance knowledge.
The case of route distance knowledge represents
pedestrians who have learned route distances but not
route congestion levels. These pedestrians primary
concern is arriving at the destination rather than the
congestion levels along the way. The completeness
of the distance knowledge which a pedestrian has is
dependent upon the amount of training the agent has.
Knowledge of the average congestion costs is
more reflective of reality as pedestrians familiar with
a building are also typically familiar with the route
usage patterns. This case assumes that pedestrians
remember congestion costs from previous experience
in the building in addition to the distances between
various decision points. The congestion costs are as-
sociated with routes between decision points. Each
time an agent travels a given route, the expected cost
for that route is then updated. The completeness of
the distance/congestion knowledge which a pedes-
trian has is dependent upon the amount of training the
agent has.
The final case we consider is providing pedestri-
ans with dynamic route congestion information and
route distance information. This allows a pedestrian
to evaluate all possible routes for distance and con-
gestion, even when those routes are not directly per-
ceivable (i.e. the route cannot be seen). Such infor-
mation may one day be generally available to pedes-
trians through personal hand-held devices or public
displays(Barnes et al., 2007; Kray et al., 2005; M
¨
uller
et al., 2008).
6 EXPERIMENTAL SETUP
All the experiments conducted in this paper use four
different building layouts (see Figure 3). Building A
is designed with specific congestion considerations in
mind. To pedestrians in the inner rooms, each room
doorway appears to be of equal value. However, the
lower doorways lead to a wider corridor and exit and
will thus be able to accommodate more pedestrians.
Building B is designed to be representative of a gen-
eral building layout. Buildings C and D are approx-
imations of actual buildings found on the California
State University, Long Beach campus.
6.1 Experiment 1
The purpose of the first set of experiments is to
demonstrate the feasibility of using reinforcement
learning as a means to represent pedestrian knowl-
edge in a simulation environment. To do this, we
show that as the number of learning trials (to which
an agent is subjected to) increases, the amount of
building knowledge the pedestrian acquires also in-
creases. We show that this increase in building knowl-
edge leads to a corresponding decrease in pedestrian
egress times.
For each building, we conduct the test as follows.
Five hundred pedestrians are trained in the building
for 100 simulation runs during which the agents learn
route distance costs. After each simulation run, the
agents’ current policy is saved to disk so that we can
recover the policy learned after any given number of
simulations runs.
In order to determine how much knowledge an
agent has gained about a particular building, we first
need to define some metrics. We consider three
key factors affecting route knowledge: 1) the num-
ber of known decision points (node knowledge), 2)
the number of known paths between decision points
(edge knowledge), and 3) the number of decision
points known to be direct exits (exit knowledge). Us-
ing these metrics, we can then calculate the average
amount of knowledge obtained by the agents for each
trial run.
Figure 4 shows the average effect of multiple
training runs on the total knowledge an agent has.
As can be seen from the graphs, the different met-
rics indicate different knowledge levels, but the val-
ues of all metrics show an increase as the number of
training runs increases. Agents quickly learn a high
percentage of the decision points and paths between
decision points, but for the key decision points repre-
senting building exits the percentages are lower. This
indicates that although the agent learns many internal
routes after 100 training runs, they are learning differ-
ent exits at a slower rate.
As the amount of knowledge pedestrians have in-
creases, so should the efficiency with which agents
egress from the building. We measure the egress time
of 500 pedestrians randomly distributed throughout
the building, averaged over 20 simulations using poli-
cies of various training levels. Averaging the results
over 20 simulation runs provides relatively small er-
ror bars which boost our confidence in the accuracy
of the mean egress times obtained for each training
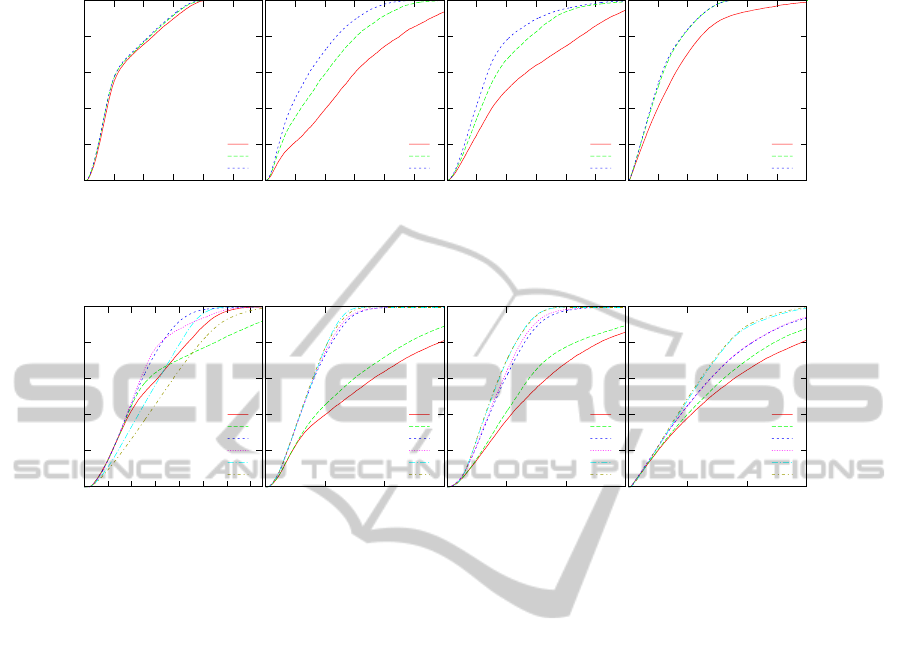
level. Figure 5 compares the average egress times ob-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
250
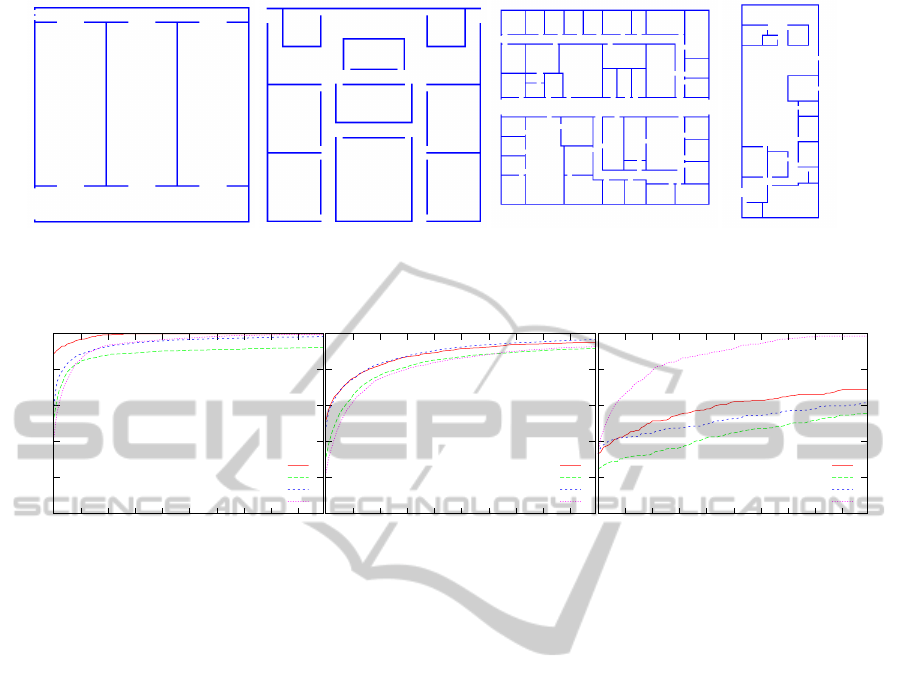
(a) Building A (b) Building B (c) Building C (d) Building D
Figure 3: Building layouts used in the congestion experiments.
0
0.2
0.4
0.6
0.8
1
0 10 20 30 40 50 60 70 80 90
Percent Evacuated
Time (seconds)
Percent of Nodes Learned Over Time
10 20 30 40 50 60 70 80 90
Time (seconds)
Percent of Edges Learned Over Time
10 20 30 40 50 60 70 80 90
Time (seconds)
Percent of Exits Learned Over Time
A
B
C
D
A
B
C
D
A
B
C
D
Figure 4: Percentage of knowledge gained over time using three metrics.
tained when agents have gone through 10, 50, and 100
training runs for each building.
The effect of additional training in building A
is minimal. This implies that the additional knowl-
edge gained is not helpful in improving egress times.
Building A is fairly simple and therefore the general
layout can be learned quickly. Building B and build-
ing C both show substantial improvement in egress
times as the number of training runs increases indi-
cating that the knowledge gained by the pedestrians
is indeed helpful in improving egress times. Building
D shows substantial improvement in egress times be-
tween 10 and 50 training runs, but then little change
occurs between 50 and 100 training runs. This cor-
relates to the previous results in Figure 4, where the
amount of knowledge gained between 50 and 100
training runs is much less for building D than it is for
the other buildings.
6.2 Experiment 2
The next set of experiments are intended to measure
the effectiveness of learning average route congestion
costs in addition to route distance costs. The exper-
iments also measure the effectiveness of reacting to
currently visible congestion and adjusting the selected
route accordingly. Notice the distinction between
learning congestion levels and reacting to current con-
gestion levels. ‘Choose to react’ to congestion or ‘ig-
nore congestion’ does not imply either a knowledge
or a lack of knowledge of average congestion levels.
It is merely a decision of whether or not to include
current congestion levels in the decision-making pro-
cess. Conversely, having congestions knowledge does
not imply that the agent must react to current con-
gestion levels, only that the agent will consider pre-
vious learned congestion levels when making the de-
cision. Thus, an agent having no previous congestion
knowledge can react to current congestion levels, and
an agent having previous congestion knowledge can
choose to ignore current congestion levels.
For each building, we conduct the test as fol-
lows. Five hundred pedestrians are trained in the
building for 100 simulation runs, learning both route
distance costs and average congestion levels. The
agents’ current policies are check pointed after 100
training runs so that we can compare the egress times
when pedestrians have high levels of knowledge. We
then measure the total egress time of 500 pedestri-
ans randomly distributed throughout the rooms, av-
eraged over 20 simulations. There are two parame-
ters that we adjust in these tests: whether the pedes-
trian reacts to congestion, and what type of knowl-
edge the pedestrian has. Pedestrians can either ignore
SIMULATING KNOWLEDGE AND INFORMATION IN PEDESTRIAN EGRESS
251
0
0.2
0.4
0.6
0.8
1
0 50 100 150 200 250 300
Percent Evacuated
Time (seconds)
Building A
50 100 150 200 250 300
Time (seconds)
Building B
50 100 150 200 250 300
Time (seconds)
Building C
50 100 150 200 250 300
Time (seconds)
Building D
10
50
100
10
50
100
10
50
100
10
50
100
Figure 5: Percentage of pedestrians exited over time using three levels of training.
0
0.2
0.4
0.6
0.8
1
0 20 40 60 80 100 120 140
Percent Evacuated
Time (seconds)
Building A
50 100 150
Time (seconds)
Building B
50 100 150
Time (seconds)
Building C
50 100 150
Time (seconds)
Building D
Adj-Dist
Ign-Dist
Adj-Cong
Ign-Cong
Adj-Sys
Ign-Sys
Adj-Dist
Ign-Dist
Adj-Cong
Ign-Cong
Adj-Sys
Ign-Sys
Adj-Dist
Ign-Dist
Adj-Cong
Ign-Cong
Adj-Sys
Ign-Sys
Adj-Dist
Ign-Dist
Adj-Cong
Ign-Cong
Adj-Sys
Ign-Sys
Figure 6: Percentage of pedestrians exited over time using three levels of training.
current congestion levels or react to current conges-
tion levels, and pedestrians can have either learned
distance knowledge, learned congestion knowledge
(which also includes distance knowledge), or system
provided knowledge for both route distances and con-
gestion levels. Therefore we have six cases to con-
sider: 1) ignore current congestion and have learned
distance knowledge (Ign-Dist), 2) ignore current con-
gestion and have learned both distance and conges-
tion knowledge (Ign-Cong), 3) ignore current conges-
tion and have perfect distance knowledge provided
by the system (Ign-Sys), 4) adjust to congestion and
have learned building distance knowledge (Adj-Dist),
5) adjust to congestion and have learned both distance
and congestion knowledge (Adj-Cong), and 6) adjust
to congestion and have perfect distance and conges-
tion knowledge provided by the system (Adj-Sys).
The results are shown in Figure 6. In every
building layout tested, agents which have learned
both route distances and congestion levels have faster
egress times than agents which have learned only
route distances. This indicates that learning average
congestion levels and using that knowledge in pedes-
trian egress is beneficial. However, the same cannot
be said about reacting to congestion. In building A,
reacting to current congestion always improves per-
formance. This is not surprising because building A
is specifically designed to contain severe congestion
problems which are easily mitigated. In Buildings B,
C and D, reacting to current congestion yields little
change in overall egress time except when pedestri-
ans have only route distance knowledge. In this case,
reacting to the current congestion levels actually de-
creases the overall performance of the agents. This is
occurring because the pedestrians are uniformly dis-
tributed within the building so the congestion is also
well distributed. Thus, when a pedestrian chooses to
take an alternate route, they soon discover that it is
equally congested. Finally, in building D, reacting
to congestion improves performance if the pedestrian
has learned previous congestion levels. Although the
pedestrians are still uniformly distributed, the routes
to the exits are not. Knowing the typical congestion
levels allows an agent to make a better decision when
reacting to the current congestion levels.
Interesting patterns in the data can also be ob-
served when the egress times of agents with differ-
ent types of knowledge are compared. In half the
buildings (A, and D) utilizing learned congestion lev-
els provides the best egress times, even outperform-
ing system provided information. This is probably
due to the oscillation which can occur when dynamic
information is provided. As is also seen in traf-
fic management, providing dynamic information can
ICAART 2012 - International Conference on Agents and Artificial Intelligence
252

lead to many pedestrians switching routes simulta-
neously which decreases the efficiency with which
pedestrians are able to evacuate the building. In ev-
ery building layout tested, when pedestrians have only
learned distance information, the performance is the
worst of all possibilities considered. Interestingly
though, a pedestrian having system information but
ignoring current congestion levels and using only dis-
tance information is able to egress from most build-
ings quickly. However, the distance information of
such a pedestrian is complete. One would expect that
with enough training, pedestrians having learned only
distance cost would also be able to egress from build-
ings with similar efficiency.
7 CONCLUSIONS
Providing agents with perfect knowledge is unrealis-
tic for many pedestrian egress situations. However,
manually specifying specific route knowledge can be
a difficult and time-consuming task. We have shown
that reinforcement learning can be applied to success-
fully represent different levels of knowledge about a
building layout and produces egress times dependent
upon the knowledge level of the pedestrians. We have
also provided three different metrics for measuring
the amount of building knowledge an agent has.
Using reinforcement learning, we have also shown
that learning congestion cost in addition to distance
costs leads to quicker egress times. However, reacting
to current congestion levels has ambiguous results.
This is consistent with similar studies in the traffic
management domain. The layout of the building is
found to have an impact on the strategy a pedestrian
should use to minimize egress time.
REFERENCES
Antonini, G., Bierlaire, M., and Weber, M. (2006). Dis-
crete choice models of pedestrian walking behav-
ior. Transportation Research Part B: Methodological,
40(8):667–687.
Banerjee, B., Bennett, M., Johnson, M., and Ali, A.
(2008). Congestion avoidance in multi-agent-based
egress simulation. In IC-AI, pages 151–157.
Barnes, M., Leather, H., and Arvind, D. (2007). Emer-
gency evacuation using wireless sensor networks. Lo-
cal Computer Networks, Annual IEEE Conference on,
0:851–857.
Dia, H. (2002). An agent-based approach to modelling
driver route choice behaviour under the influence of
real-time information. Transportation Research Part
C: Emerging Technologies, 10(5-6):331–349.
Feuz, K. (2011). Pedestrian leadership and egress assistance
simulation environment. Master’s thesis, Utah State
University.
Gwynne, S., Galea, E. R., Lawrence, P. J., and Filippidis, L.
(2001). Modelling occupant interaction with fire con-
ditions using the buildingexodus evacuation model.
Fire Safety Journal, 36(4):327–357.
Helbing, D. and Johansson, A. (2009). Pedestrian,
crowd and evacuation dynamics. In Encyclopedia of
Complexity and Systems Science, pages 6476–6495.
Springer.
Helbing, D., Sch
¨
onhof, M., Stark, H., and Holyst, J. (2005).
How individuals learn to take turns: Emergence of al-
ternating cooperation in a congestion game and the
prisoner’s dilemma. Advances in Complex Systems,
8(1):87–116.
Hoogendoorn, S. and Bovy, P. (2004). Pedestrian route-
choice and activity scheduling theory and models.
Transportation Research Part B: Methodological,
38(2):169–190.
Kaelbling, L., Littman, M., and Moore, A. (1996). Rein-
forcement learning: A survey. Journal of Artificial
Intelligence Research, 4:237–285.
Koh, W. L., Lin, L., and Zhou, S. (2008). Modelling and
simulation of pedestrian behaviours. In PADS ’08:
Proceedings of the 22nd Workshop on Principles of
Advanced and Distributed Simulation, pages 43–50,
Washington, DC, USA. IEEE Computer Society.
Kray, C., Kortuem, G., and Kr
¨
uger, A. (2005). Adaptive
navigation support with public displays. In Proceed-
ings of the 10th international conference on Intelligent
user interfaces, IUI ’05, pages 326–328, New York,
NY, USA. ACM.
M
¨
uller, J., Jentsch, M., Kray, C., and Kr
¨
uger, A. (2008).
Exploring factors that influence the combined use of
mobile devices and public displays for pedestrian nav-
igation. In Proceedings of the 5th Nordic conference
on Human-computer interaction: building bridges,
NordiCHI ’08, pages 308–317, New York, NY, USA.
ACM.
Ozel, F. (2001). Time pressure and stress as a factor during
emergency egress. Safety Science, 38(2):95–107.
Pan, X. (2006). Computational Modeling of Human and
Social Behaviors for Emergency Egress Analysis. PhD
thesis, Stanford University, Stanford, California.
PTV AG (2011). http://www.ptvag.com/software/transport-
ation-planning-traffic-engineering/software-system-
solutions/vissim-pedestrians/. Accessed on: April 4,
2011.
Roughgarden, T. and Tardos,
´
E. (2002). How bad is selfish
routing? Journal of the ACM (JACM), 49(2):236–259.
Santos, G. and Aguirre, B. E. (2004). A critical review of
emergency evacuation simulation models. In Building
Occupant Movement during Fire Emergencies.
Wahle, J., Bazzan, A., Kl
¨
ugl, F., and Schreckenberg, M.
(2002). The impact of real-time information in a two-
route scenario using agent-based simulation. Trans-
portation Research Part C: Emerging Technologies,
10(5-6):399–417.
SIMULATING KNOWLEDGE AND INFORMATION IN PEDESTRIAN EGRESS
253
