
SOLVING THE 3D CONTAINER SHIP LOADING
PLANNING PROBLEM BY REPRESENTATION
BY RULES AND BEAM SEARCH
Anibal Tavares de Azevedo
1
, Cassilda Maria Ribeiro
1
, Galeno José de Sena
1
,
Antônio Augusto Chaves
2
, Luis Leduíno Salles Neto
2
and Antônio Carlos Moretti
3
1
Mathematics Department, State of São Paulo University, Av. Dr. Ariberto Pereira da Cunha, 333, Guaratinguetá, Brazil
2
Department of Science and Technology, Federal University of São Paulo, São José dos Campos, Brazil
3
Mathematics Department, State University of Campinas, Rua Sérgio Buarquede Holanda, 651, Campinas, Brazil
Keywords: 3D Container ship Stowage, Combinatorial Optimization, Beam Search Method.
Abstract: This paper formulates the 3D Container ship Loading Planning Problem (3D CLPP) and also proposes a
new and compact representation to efficiently solve it. Containers on board a Container ship are placed in
vertical stacks, located in different sections. The only way to access the containers is through the top of the
stack. In order to unload a container at a given port j, it is necessary to remove the container whose
destination is the port j+1, because it is located above the container we want to download. This operation is
called “shifting”. A ship container carrying cargo to several ports may require a large number of shifting
operations. These operations spend a lot of time and cost and can be avoided by using efficient stowage
planning. The key objective of the stowage planning is to minimize the number of container movements and
also the ship instability. The binary formulation of this problem is properly described and also an alternative
formulation called representation by rules is proposed. A Beam Search is combined with representation by
rules to solve the 3D CLPP in manner that ensures that every solution analyzed in the optimization process
is compact and feasible.
1 INTRODUCTION
The operational efficiency of a port depends on a
proper container moving planning, called as
“stowage planning”, especially because the
Container ship loading process demands unloading
service time, and this has a cost. According to
Dubrovsky et al. (2002), the charge of the ship for
moving containers could be high, costing about $200
per container move. Thus, the objective of the
stowage planning for the Container ship is to
minimize the number of unnecessary movements. It
is also important to point out that other criteria must
be observed such as Container ship stability (weight
of the containers), type of containers (standard,
hazardous, etc), and others (Ambrosino et al., 2006;
Avriel et al., 1998; Wilson and Roach, 2000). In this
Paper, the problem that will be solved is the one that
shows how to create a proper container moving
planning, which minimizes the unnecessary
container movements and also the instability. The
development of an efficient method could be derived
observing the cellular structure of the Container
ship, as showed by Figure 1, which forces the
containers to be organized in vertical stacks. As a
consequence the containers located on the top of the
stack have be moved in order to allow the unloading
of the containers located at the bottom of the stack.
This rearrangement is called as a necessary shift, and
it occurs because the containers can be removed
from the Container ship through the top of the stack.
Figure 1: The Container ship cellular structure from
Wilson and Roach (2000).
As showed by (Avriel et al., 1998), the 2D
Container ship loading planning problem (CLPP)
132
Tavares de Azevedo A., Maria Ribeiro C., José de Sena G., Augusto Chaves A., Leduíno Salles Neto L. and Carlos Moretti A..
SOLVING THE 3D CONTAINER SHIP LOADING PLANNING PROBLEM BY REPRESENTATION BY RULES AND BEAM SEARCH.
DOI: 10.5220/0003757801320141
In Proceedings of the 1st International Conference on Operations Research and Enterprise Systems (ICORES-2012), pages 132-141
ISBN: 978-989-8425-97-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

could be formulated as a 0-1 binary linear model,
whose optimal solution can be found by assuming
that the number of containers to be shipped, along
with their origin and the destination ports, are known
in advance. However, this binary model is limited
for small instances, since the number of binary
variables and constraints substantially grows with
the number of ports and Container ship dimensions.
This binary model also does not take into account
the consistency of the container’s allocation as the
ship proceeds from port to port.
It was also proved by (Avriel et al., 2000) that
the 2D CLPP is NP-Complete and this motivates the
development of a series of heuristics and meta-
heuristics to obtain good solutions for this problem.
(Avriel et al., 1998) proposed the Suspensory
Heuristic Procedure, which avoids the binary model
problem by observing only the Container ship
arrangement and the containers that must be loaded
for each specific port. The Paper also described how
to generate instances for the CLPP. Dubrovsky et al.
developed a Genetic Algorithm with a compact
solution encoding, which consists of a string with
sections equal to the number of ports, and each
section is composed by four vectors related to the
number of necessary shifts (Dubrovsky et al., 2002).
(Ambrosino 2006, 2010) also introduced and tested
in the model the notion of stability by considering
that each container has a weight.
Due to the CLPP being a complex problem, this
Paper proposes a two-stage procedure. The Beam
search manipulates the encoded solutions, which are
then evaluated by a decoding algorithm that consists
of the loading and the unloading Container ship
simulation for every/each port. This decoding
procedure is performed in a manner that the size of
the search space can be reduced and human
knowledge may be properly incorporated. This
encoding was called as the representation by rules.
Section 2 presents the CLPP mathematical model.
Section 3 explains the encoding, used by Beam
Search Method, and its advantages. Section 4 details
the Beam Search Method implementation. Section 5
presents and discusses the computational results and
Section 6 presents the conclusions and future works.
2 MATHEMATICAL MODEL
A Container ship has its capacity measured in terms
of TEU (Twenty-foot Equivalent Units). For
example, a ship with 8000 TEUs is able to carry at
least 8000 twenty feet deep containers. The
Container ship has a cellular structure (see Figure 1)
where the containers are stored. These cells are
grouped in Sections, or Bays, where the containers
are stacked in forming vertical stacks. Then, a bay is
a group of cells where a certain number of
containers are organized, forming a series of vertical
stacks. Generally, each bay can lead to containers of
forty or twenty feet deep. Then, the bay could be
organized in horizontal lines numerated with r = 1,
2,…, R, in a way that line one represents the bottom
of the ship and line R is on the top of the ship, and
columns numerated with c = 1, 2, …, C, where
column 1 is the leftmost one.
For the sake of simplicity, without loss of
generality, it will be considered that:
(a) The Container ship will have a rectangular
format and can be represented by a matrix with
horizontal lines (r = 1, 2,…, R), vertical columns (c
= 1, 2, …, C) and bays (d = 1, 2,…, D) with
maximum capacity of R x C x D containers.
(b) The containers are all the same size and
weight.
(c) The ship starts to be charged in port 1. It
arrives empty.
(d) The ship visits ports 2, 3,…, N and the
Container ship will be empty in the last port,
because the ship performs a circular route where
port N in fact represents port 1.
(e) In each port i = 1, 2,…, N the Container
ship can be loaded with containers whose destination
are ports i+1, …, N.
(f) The Container ship could always carry all
the containers available in each port and this will
never exceed the maximum Container ship capacity.
In addition to conditions (a)-(f), the number of
containers that must be loaded at a certain port is
given by a transportation matrix T of dimension (N-
1)
×
(N-1), whose element T
ij
represents the number
of containers from port i that must be transported to
the destination port j. This matrix is superior and
triangular, since T
ij
=0 for every i
≥
j.
The mathematical model in terms of linear
programming with binary variables for the 3D CLPP
is given by (1)-(6).
Min
)()1()()(
21
yxxf
φ
α
αφ
−
+
=
;,,1,1,,1 NijNi LL +
=
−
=
(1)
S.a:
∑∑∑ ∑∑∑∑∑
+===
−
=== ==
=−
j
iv
R
r
C
c
i
k
R
r
C
c
ij
D
d
kji
D
d
ijv
Tdcrxdcrx
11 1
1
111 11
),,(),,(
;,,1,1,,1 NijNi LL +
=
−
=
(2)
SOLVING THE 3D CONTAINER SHIP LOADING PLANNING PROBLEM BY REPRESENTATION BY RULES AND
BEAM SEARCH
133

∑∑∑
=+=+=
=
i
k
N
ij
i
j
iv
kjv
dcrydcrx
111
),,(),,(
;,,1,1,,1 RrNi LL =−=
;,,1 Cc L=
Dd ,,1 L=
(3)
0),,1(),,( ≥
+
− dcrydcry
ii
;,,1,1,,1 RrNi LL =−=
;,,1 Cc L= Dd ,,1 L
=
(4)
∑∑ ∑ ∑ ∑
−
==
−
=+=+=
≤++
1
1
1
111
1),,1(),,(
j
i
N
jp
j
i
N
jp
p
jv
ipvipj
dcrxdcrx
;1,,1,,,2 −== RrNi LL
;,,1 Cc L= Dd ,,1 L
=
(5)
1or 0),,( =dcrx
ijv
; 1or 0),,( =dcry
i
(6)
where: the binary variable
),,( dcrx
ijv
is defined as
if, in port i, the compartment (r,c,d) has a container
whose destination is port j and this container was
moved in port v, then the variable assumes value 1;
otherwise value 0 is assumed. The term
compartment (r,c,d) represents line r, column c for
the Container ship bay d. Similarly, variable
),,( dcry
i
is defined as if, in port i, the
compartment (r,c,d) has a container; then the
variable assumes value 1; otherwise value 0 is
assumed.
The objective function (1) it composed by two
terms that gives the total cost of moving a container
and the sum of instability measure for the Container
ship configuration in each port. It was assumed that,
for all ports, the container moving has the same and
unitary value. The constraint (2) is related to the
container conservation flow. In other words, the total
number of containers in the ship in a port i must be
equal to the number of containers that had been
loaded in all ports p = 1 2, ,…, i minus the total
number of containers unloaded in all ports p = 1, 2,
…, i. The constraint (3) obliges that each
compartment (r,c,d) of the Container ship in all ports
is occupied by at most one container. The constraint
(4) is related to the physical storage of the containers
in the ship, and it imposes that, for each container on
line r+1, there must be another container on the line
r for all r = 2,…, R. The constraint (5) defines how a
container could be unloaded on the ship in port j by
imposing that if a container occupies the position
(r,c,d) on port j, and it was unloaded, then, there are
no containers upward or the containers upward were
already unloaded in ports p = 2,…, j.
The two terms which compose the objective
function (Eq. (1)) defines two optimization criteria:
the first term is a function of the number of
containers moved,
)(
1
x
φ
, and the second depends
on how the Container ship is organized in each port,
)(
2
y
φ
. The two criteria are combined by values
given by each weight α and (1-α) in a manner that
forms a bi-objective optimization framework.
The term
)(
1
x
φ
assumes that for all ports, the
container moving has the same and unitary value
which could be translated as the Eq. (7).
∑ ∑ ∑∑∑∑
−
=+=
−
+====
=
1
11
1
11 1 1
1
),,()(
N
i
N
ij
j
iv
R
r
C
c
D
d
ijv
dcrxx
φ
(7)
The term
)(
2
y
φ
refers to the Container ship
stability and assumes that every container has the
same and unitary value of weight. This term
measures the distance between the mass and the
geometric center of Container ship for every port as
described by Eq. (8).
()
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
−••=
∑∑∑
===
2
111
2
2/2/)12(),,()( Rrdcryx
R
r
C
c
D
d
i
φ
()
+
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
−••
∑∑∑
===
2
111
2/2/)12(),,( Ccdcry
R
r
C
c
D
d
i
()
2
111
2/2/)12(),,(
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
⎟
⎠
⎞
⎜
⎝
⎛
−••
∑∑∑
===
Dddcry
R
r
C
c
D
d
i
(8)
The mathematical model presented by (1)-(8) has
several drawbacks, because for real problems, the
solution encoding demands a large number of binary
variables to be represented and then, it can only be
used for small instances in practice. For example, a
CLPP solution that gives a complete stowage
planning through N ports, for an instance problem
with a container ship which has a (R
×
C
×
D) bay
dimension demands (R
×
C
×
D
×
P
3
) of x
ijv
(r,c,d)
variables and (R
×
C
×
D
×
P) of y
i
(r,c,d) variables.
It means, for instance with D = 5, R = 6, C = 50 and
N = 30, that it will be necessary 40,500,000 of
x
ijv
(r,c,d) variables and 45,000 of y
i
(r,c,d) to
represent just one solution. Furthermore, Avriel and
Penn (1993) showed that the 2D CLPP is a NP-
Complete problem, which justifies the use of
heuristics also for the 3D CLPP.
Next Section, particularly, shows how to
represent a solution without using a binary model
that leads to a large number of variables. This can be
performed by the development of a special encoding
which combines rules that describe how to load and
unload a container ship, and a simulation procedure.
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
134

This encoding is called the representation by rules.
3 THE REPRESENTATION BY
RULES
An alternative for the binary mathematical model,
presented in Section 2, is the representation by rules
and it can be better explained if the container ship is
represented by a graph, as showed in Figure 2. In
Figure 2, the node represents port p where the
container ship is docked. The container ship state
changes when it arrives and leaves port p and those
changes are represented by the arc labeled with x
p
and x
p+1
, respectively. The x
p
state will turn into x
p+1
state by these two decisions:
(a) How the existing containers will be unloaded
in port p. This decision is represented by u
p
. The u
p
decision could be seen as a result of two other
decision variables:
• q
p
variable represents the containers that must
be unloaded, because of their port p destination or
because they are blocking containers, with port p
destination.
• v
p
variable represents the containers that could
be unloaded for a better container ship arrangement
that minimizes the number of unnecessary
movements for future ports.
(b) How to reload the ship with containers from
ports 1, …, p-1, whose destinations are ports p+1,
…, P, and how to load the containers from port p.
This decision is represented by y
p
. Observe that, the
variables q
p
and v
p
will have a great influence on
how many containers will be reloaded in the ship.
Figure 2: The Container ship and possible decisions
represented by a graph with node and arcs.
Figure 2 is important to make clear that the
arrangement in the container ship will be determined
by two decisions at each port: how to unload and
load the ship. In real life, the container ship
unloading and loading is made according to
experience or rules of thumb. In other words, the
loading or unloading process follows existent rules.
These rules can be translated into a computational
program that simulates the required behavior.
The representation by rules is an interesting
alternative for the binary mathematical model, as it
has three advantages:
• It allows a compact encoding by representing
the solution as a vector with 2
×
P elements, each
storing the loading and the unloading rules that will
be used in each port.
• The skilled personnel experience can be
incorporated in the optimization process under the
form of a rule and a computational simulation.
• The solutions with this encoding are always
feasible, because they must obey the proposed
scheme given by Figure 2, and this ensures the
feasibility of the constraint (2), or, in order words, it
ensures that the arrangement in the container ship
when leaving each port p (x
p+1
) depends on the
container ship arrangement when just arriving at port
p (x
p
), plus how many containers are unloaded (u
p
)
and loaded (y
p
) on port p. In fact, constraint (2)
represents a kind of container conservation law. The
feasibility of (3)-(6) constraints will be ensured by
incorporating those in the computational simulation
related to every rule.
The computational implementation of the
representation by rules depends on the definition of
two elements:
• Since the container ship has a cellular
structure, as shown in Figure 1, the Container ship
arrangement state can be represented by a B matrix
called state matrix, and this matrix represents the
variable related to the container ship state (x
p
and
x
p+1
).
• The changes on the Container ship state made
by the application of the unloading and loading
rules, which is represented by u
p
and y
p
,
respectively, can be performed using a
computational simulation procedure.
Matrix B represents the Container ship arrangement
since each element of B matrix is represented by
B
drc,
and it describes whether there is a container
whose destination is port p in the cell located in row
r, column c and bay d, if B
drc
= p; if the B
drc
is
empty, then B
drc
is 0. For better illustrating this, a B
matrix where D = 3 and R = C = 2 is showed in
Figure 3.
SOLVING THE 3D CONTAINER SHIP LOADING PLANNING PROBLEM BY REPRESENTATION BY RULES AND
BEAM SEARCH
135
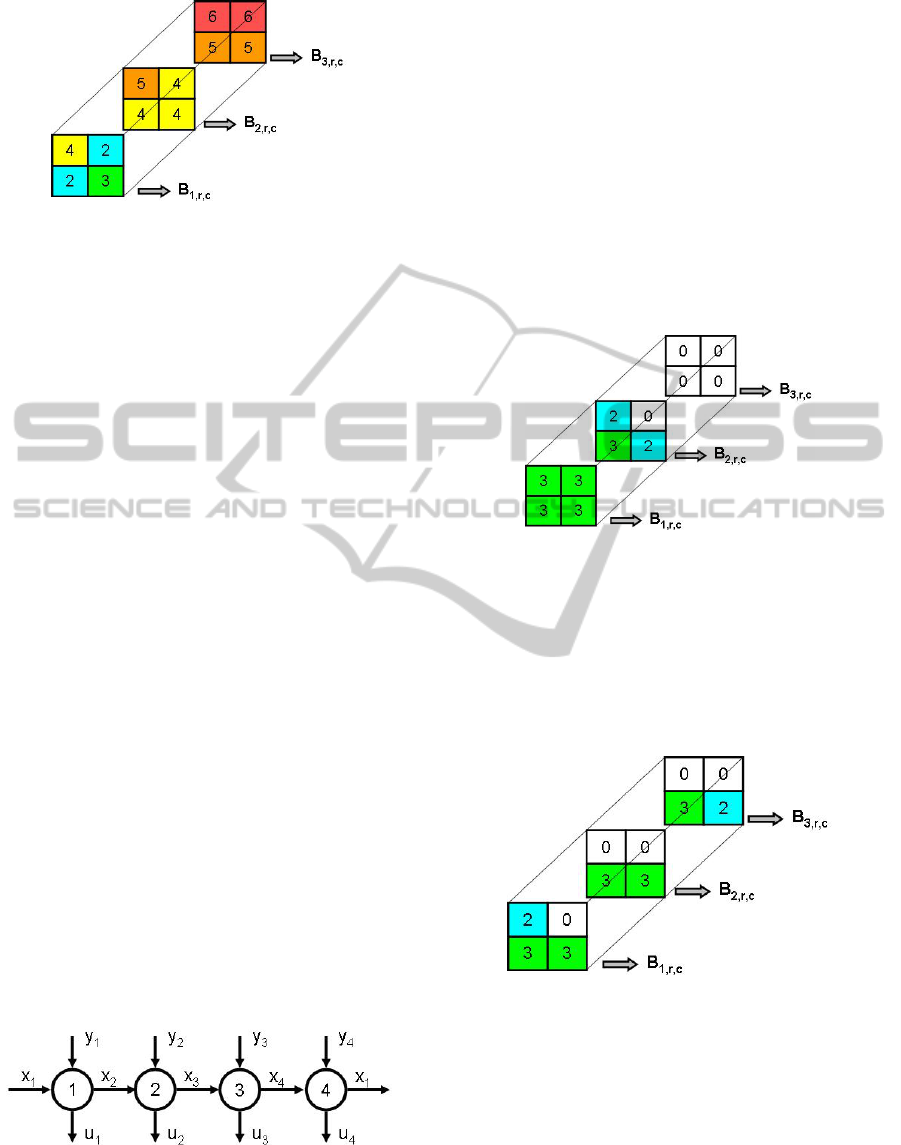
Figure 3: The state matrix B representing a Container ship
occupation with 12 containers capacity and six-port
destination.
In Figure 3, line 2 represents the bottom of the
container ship and line 1 represents the top of the
container ship. Then, the element (1,1,1) is equal to
4, which means that this cell is occupied by a
container, whose destination is port 4. Using the
same criteria, the element (3,2,2) equals 5 and it
means that this cell is occupied by a container,
whose destination is port 5.
Supposing that matrix B in Figure 3 represents
the container ship in port 2, in order to unload this
container ship, it is necessary to move the containers
located in cells (1,2,1), and (1,1,2). However,
observe that the container in cell (1,2,1) can only be
unloaded if the container located in cell (1,1,1) is
unloaded too; even the destination of this container
is port 4. The objective of the CLPP is to minimize
the number of movements of this kind by
performing an adequate arrangement of the
container ship bay for every port.
The representation by rules approach treats the
CLPP as a problem where a matrix B represents the
container ship arrangement (x
p
) before arriving in
port p and it will be modified in each port by
deciding how to perform the unloading (u
p
) and
loading operations (y
p
) by defining an unloading and
a loading rule, respectively. It is also important to
stress that the constraint (2) connects decisions
through ports. The choice of unloading or loading
rule for port 2 can indirectly influence the container
ship arrangement in the port 4, as showed in Figure
4.
Figure 4: The graph representation for the CLPP with four
ports destination.
Next, a description of how the loading and
unloading rules affect the Container ship
arrangement will be presented by supposing that
Container ship dimensions are the same used in
Figure 3.
3.1 Loading Rules
Loading Rule Lr1: This rule fills matrix B row by
row, from left to right, starting from the last line for
each bay in a manner that the containers with the
farthest destination are placed on the lowest part of
the stacks. Figure 5 shows the load rule application
for the container ship in port 1.
Figure 5: The state matrix B representing a Container ship
occupation after applying the Lr1.
Loading Rule Lr2: This rule fills matrix B row by
row, from left to right, starting from the first bay in a
manner that the containers with the farthest
destination are placed on the lowest part of the
stacks. Figure 6 shows the load rule application for
the container ship in port 1.
Figure 6: The state matrix B representing a Container ship
occupation after applying the Lr2.
Loading Rule Lr3: This rule is the reverse of the
Lr1, in other words, fills matrix B row by row, from
right to left, starting from the last line for each bay
the in a manner that the containers with the farthest
destination are placed on the lowest part of the
stacks. Figure 7 shows the load rule application for
the container ship in port 1.
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
136
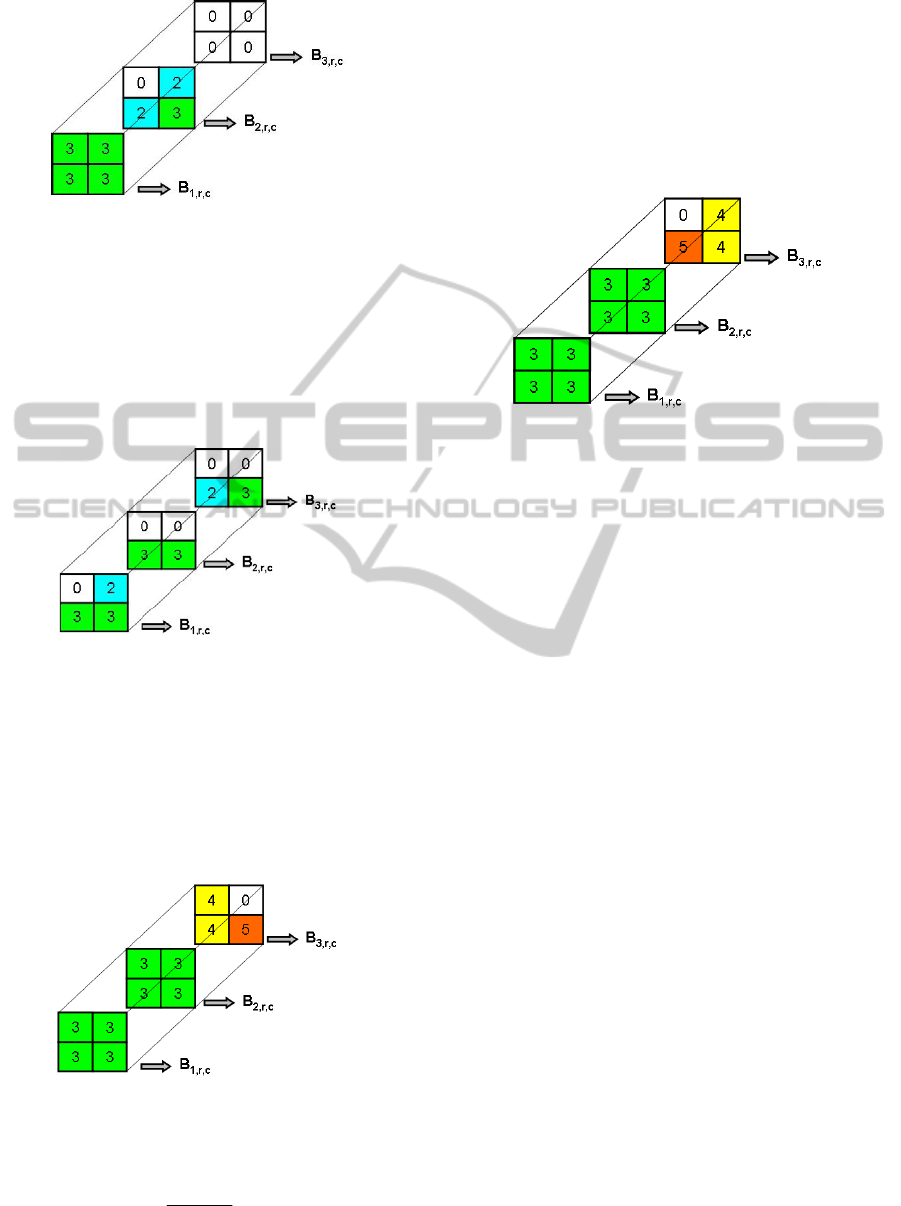
Figure 7: The state matrix B representing a Container ship
occupation after applying the Lr3.
Loading Rule Lr4: This rule is the reverse of the
Lr2, in other words, fills matrix B row by row, from
right to left, starting from the first bay in a manner
that the containers with the farthest destination are
placed on the lowest part of the stacks. Figure 8
shows the load rule application for the container ship
in port 1.
Figure 8: The state matrix B representing a Container ship
occupation after applying the Lr4.
Loading Rule Lr5: This rule fills matrix B from left
to right starting from the first bay row by row until
the row
θ
p
is reached. The value
θ
p
is computed by
Eq. (9). Then another bay is filled in a manner that
the containers with the nearest destination are used
on first the stacks. Figure 9 shows this load rule with
the Container ship in port 2.
Figure 9: The state matrix B representing a Container ship
occupation after applying the Lr5.
⎥
⎥
⎥
⎥
⎥
⎤
⎢
⎢
⎢
⎢
⎢
⎡
×
=
∑∑
=+=
CD
T
p
i
N
pj
ij
p
11
θ
(9)
Loading Rule Lr6: This rule is the reverse of the
Lr5, in other words, it fills matrix B from right to
left starting from the first bay row by row until the
row
θ
p
is reached. The value
θ
p
is computed by Eq.
(9). Then another bay is filled in a manner that the
containers with the nearest destination are used on
first the stacks. Figure 10 shows this load rule with
the Container ship in port 2.
Figure 10: The state matrix B representing a Container
ship occupation after applying the Lr6.
3.2 Unloading Rules
Unloading Rule Ur1: Suppose that the container
ship arrived at port p. This rule will only remove the
containers whose destination is port p, and all the
ones that are blocking the stacks.
Unloading Rule Ur2: This rule imposes that the
Container ship must unload every container when
arriving at a specific port p, in a manner that it
allows a complete rearrangement of every stack.
3.3 Combining Loading and Unloading
Rules
In order to avoid the need of using two values to
indicate what loading and unloading rules will be
used for every port it is possible to simplify the
encoding by defining the various combinations of
the loading and unloading rules. A particular
combination of the loading and the unloading rules,
for port p, is defined as a rule. For better illustrating
the rule concept, 6 loading rules (LR) and 2
unloading rules (UR) described before can be
combined to generate four rules. Table 1 illustrates
all the rules created as a result of these LR and UR
combination.
SOLVING THE 3D CONTAINER SHIP LOADING PLANNING PROBLEM BY REPRESENTATION BY RULES AND
BEAM SEARCH
137
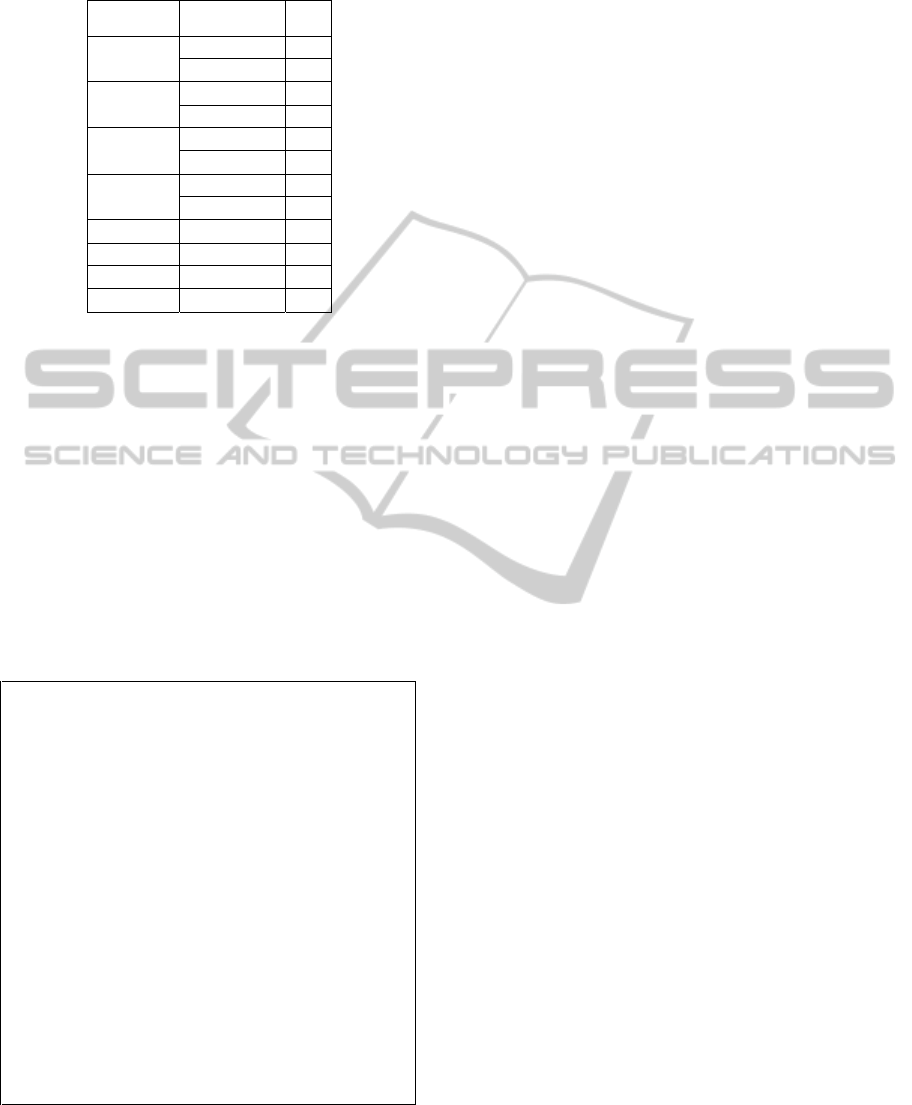
Table 1: Rules produced by the combination of load and
unload rules.
Load Rules Unload Rules Rule
LR1
UR1 1
UR2 2
LR2
UR1 3
UR2 4
LR3
UR1 5
UR2 6
LR4
UR1 7
UR2 8
LR5 UR1 9
UR2 10
LR6 UR1 11
UR2 12
Table 1 shows the various combinations of LR and
UR forming rules. For example, rule 2 is a
combination of the unload rule UR2 and the load
rule LR1. This encoding allows the representation of
a solution for the CLPP that employs a vector whose
number of elements is equal to the number of ports.
To adopt the encoding described before is
necessary to define a translation scheme which
simulates the unloading and loading actions
proposed by the rules. This translation extract from
every element of the vector s the unload and load
rules that should be applied for the Container ship
arrangement simulation in every port, as described
in Figure 11, and, afterwards, this gives the number
of containers moved in every port.
Translation Scheme
begin
p ← 1,nmov ← 0
start(B)
while (p < N ) do
start
[ur, lr] = extractRules(s(p))
if (p > 1)
[aux, B, T] = unloading(ur, B, p)
nmov ← nmov + aux
end
if (p < N-1)
[aux, B, T] = loading(lr, B, T, p)
nmov ← nmov + aux
end
p ← p + 1
return nmov
end
End
Figure 11: Translation scheme returns number of
containers moved through the ports for a solution vector s.
The translation scheme showed in Figure 11 will
make it easy to employ meta-heuristics and heuristic
methods like the Beam Search described in Section
4 since each solution will be represented by only one
vector and each vector always represents a feasible
solution.
4 THE BEAM SEARCH METHOD
The Beam Search is an implicit enumeration method
for solving combinatorial optimization problems. It
could be said that it is an adaptation of the Branch
and Bound method where only a predetermined
number of best partial solutions (nodes) are
evaluated in each level of the search tree while the
others are discarded permanently. As a big part of
the tree search nodes is discarded, it means that only
a few nodes are kept for further branching and the
others are pruned off permanently, the method
execution time is polynomial in the size of the
problem.
In other words, it can be said that the Beam
Search is a tree search technique that, in each level
of the tree a fixed number of nodes is analyzed, and
thus a fixed number of solutions. The nodes number
analyzed in each level is called beam width and is
denoted by β.
The Beam Search was first used by the
community of Artificial Intelligence to treat
problems of speech recognition (Lowerre, 1976).
The literature gives a lot of applications of this
method in scheduling problems: (Della Croce, F.;
T'kindt, 2002; Dubrovsky et all., 2002; Valente, J.
M. S; Alves, 2005; Ow and Morton, 1988).
Before building the search tree, it is necessary to
establish the following definitions:
(D.1) The tree is constructed by level and in
each level i the assignment of rule r is made for
every port i.
(D.2) The nodes that are in level 1 of the tree are
called seed nodes because each of them will
generate a sub-tree of decisions.
(D.3) In each level i, when making the
assignment a rule r to a port i, two costs are
considered: the unloading number of movements
and the loading number of movements. It is also
important to remember that the rule assignments
performed in previous ports will affect container
ship arrangement in port i which, in turn, indirectly
affect the number of movements in port i.
Considering that the tree has N levels (D.1),
where N is the number of ports, a complete problem
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
138

solution, with attribution of all R rules to all the N
ports is only obtained when defining the assignments
until level N.
To avoid the exponential growth of the tree, the
proposed algorithm does not create all the nodes of
the tree. The nodes are created according to some
rules. In each node of the tree, the following
information is stored as:
(1) Rule Identification;
(2) Port Identification;
(3) Unloading and loading number of container
movements from the simulation (Figure 11) and
related to the allocation made in the node;
(4) Partial cost of the solution, i.e., total number
of movements performed until the actual level was
reached.
During the construction process of the solution
tree, the first criterion whether to create or not a
node in the level i, it must be checked whether the
constraints are within their limits. One node will
only be created (assignment of rule r) in level i, if
the constraints (2) to (6) holds. If not then, all the
branches that will be originated from this node are
not going to exist. However, this is not the case for
the representation by rules integrated with
simulation because the rule r always produces a
feasible arrangement for the container ship in port
(level) i.
After going through the test to check whether the
constraints hold, the node will only remain in the
solution tree if it passes in the search width criterion
β. For example, if the search width chosen by the
user is β =2 in each level, only the nodes that
generate the two minor solutions, computed by the
technique of the greedy algorithm, remain in the
tree.
Thus, for β =2, each node will only generate two
branches, and they will be those that the greedy
solution computation produces the lowest cost.
Initially the algorithm is in level one and start
creating nodes (S1.1). The nodes of level 1 are the
seed nodes and one seed node is created for each
rule. In (S1.2), for each node created in (S1.1), it is
assigned a rule of the vector of rules that will be
applied to each port. Following, it is calculated the
unloading and loading number of movements of
each of these nodes.
The greedy best-first search performed in the 2
nd
Step, aims to choose, in the 3
rd
. Step, which nodes of
level i should remain in the tree of feasible solutions
to respect the width of search β. For example, if
β=2, only two nodes will remain in each level.
The creation process of the greedy solution is
similar to the process of the tree of solutions
creation, except that here, in each step, it is chosen
the allocation that generated the best partial solution
of the node, i.e., the nodes with less costs will be
part of the solution. A more complete description of
the Beam Search Method and also the greedy best-
first search could be found in (Ribeiro et al, 2010).
5 RESULTS
To verify the developed Beam Search performance,
15 instances were automatically and randomly
generated to test the developed approach. These
instances are classified according to the number of
ports, the type of transportation the matrix T, and
Container ship dimension. For each instance, it was
generated a transport matrix T which ensures that the
Container ship capacity will not be exceeded for
every port p. In other words, the value given by Eq.
(9) must be lower or equal to R for every port p. It
means, in mathematical terms, that the inequality
(10) holds for every port.
CRT
p
i
N
pj
ij
×≤
∑∑
=+=11
for all p= 1, ..., N (10)
According to (Avriel et al. 1998), it is possible to
generate three types of transportation matrix: 1 -
Mixed, 2 - Long, 3- Short. This classification for the
transportation matrix expresses how long a container
must be taken by the container ship through the
ports. The Short Transportation Matrix indicates the
majority of the containers that will remain for a short
number of ports until the unloading. For the Long
Transportation Matrix, it is expected the greatest
number of containers remaining in the Container
ship along most of the ports. The Mixed is created in
a manner that it mixes Short and Long instances
characteristics. The ship dimension adopt for the
instances presented in this article are D = 5, R = 6, C
= 50. All instances are available at following site:
https://sites.google.com/site/projetonavio/home
In Tables 2 and 3, the column index I
corresponds to instance number, N corresponds to
how many ports the Container ship has to pass
through, the column index M refers to the type of
transportation matrix, NMin refers to lower bound
on the number of movements (the lower bound value
can be obtained by multiplying by two the sum of
T
ij
, which comes from Eq. (10)), FO1 is the total
number of movements performed (Eq. (7)), FO2 is
SOLVING THE 3D CONTAINER SHIP LOADING PLANNING PROBLEM BY REPRESENTATION BY RULES AND
BEAM SEARCH
139
total measure of instability (Eq. (8)) and T is the
computational time spent in seconds. The results
presented in Table 2 and 3 were obtained with a
program created in a Matlab 7.0, a machine with a
Processor Intel Core Duo 1.66 GHz, RAM memory
of 2 GB and Operational System Windows Vista
with Service Pack 2.
Table 2: Results obtained for (α=1, β=0).
I N M Nmin
FO1 FO2 T
1 10 1 6994
7072 13625.36 429.46
2 10 2 4172
4202 10300.00 403.39
3 10 3 17060
17074 23009.21 453.83
4 15 1 9974
10234 7234.84 1752.34
5 15 2 4824
4936 18706.99 1550.85
6 15 3 24908
24992 35435.61 1808.89
7 20 1 10262
10432 10432.02 4275.94
8 20 2 4982
5152 18453.41 3946.33
9 20 3 32602
32610 66610.44 4102.06
10 25 1 11014
11154 18180.85 8217.97
11 25 2 5002
5156 27224.53 7576.42
12 25 3 43722
43942 66329.68 9506.44
13 30 1 11082
11430 15023.16 15756.15
14 30 2 4720
5598 8801.76 14468.23
15 30 3 53592
53896 85059.37 17335.38
Table 3: Results obtained for (α=0, β=1).
I N M Nmin
FO1 FO2 T
1 10 1 6994
10432 2630.06 507.34
2 10 2 4172
7172 339.74 522.42
3 10 3 17060
17642 9598.45 618.38
4 15 1 9974
15058 1756.12 2872.77
5 15 2 4824
9560 2312.91 2274.02
6 15 3 24908
25952 17753.68 2022.22
7 20 1 10262
16374 5743.22 5723.36
8 20 2 4982
8652 1678.77 4863.09
9 20 3 32602
33544 44019.80 4651.98
10 25 1 11014
14058 4294.59 9684.85
11 25 2 5002
10240 6163.01 9455.98
12 25 3 43722
45304 31493.30 10397.03
13 30 1 11082
18972 3439.41 18073.31
14 30 2 4720
7544 1050.04 15066.07
15 30 3 53592
55062 38160.15 18301.89
The results presented in Table 2 and 3 shows that
the Beam Search combined with the representation
by rules could provide solutions for instances with
30 ports and a container ship with 5 bays, 6 rows
and 50 columns dimension which, through equations
(1)-(8), each solution must have 40,545,000 binary
variables (30
3
× 5 × 6 × 50 + 30 × 5 × 6 × 50).
From Tables 2 and 3 is could be said that each 5
increment in the number of ports will results in a
corresponding increment of about 6 minutes in the
computational time spent.
The results also show that when the objective
function is to minimize the number of movements
performed (α=1, β=0), for the Short transportation
matrix (type 3), the representation by rules and the
Beam Search produces results near the optimal
solution in terms of the number of movements,
indicating the adequacy of the proposed rules and
produces results near the lower bound like in the
instances with 10, 15 and 20 ports which solution
are 0.08%, 0.34% e 0.02%, respectively, upper the
lower bound.
For instances with other transportation matrix
like Mixed (type 1) and Long (type 2), the Beam
Search presented results distant from the lower
bound and one possible explanation is the need to
create more adequate rules for these kinds of
instances.
When the objective function is set to minimize
the instability measure (α=0, β=1), the solutions
given by Beam Search has a significant increment in
the number of movements, but with a correspondent
improvement in the instability measure. For
example, for the instance I = 14 the instability
measure is significantly improved and is reduced
about 8 times.
This proves bi-objective optimization nature of
the 3D CLPP and future work must address this
problem with methods that deals with pareto-optimal
frontier in order to choose the solutions.
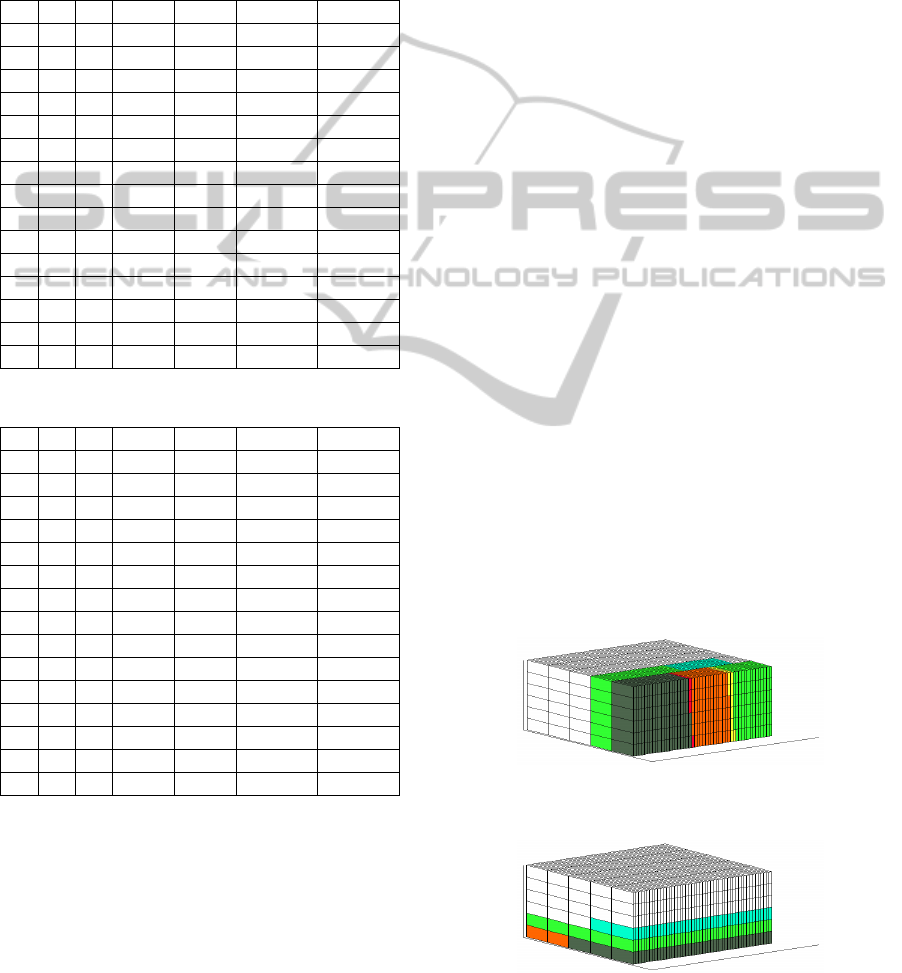
In order to exemplify the bi-objective
optimization nature of the 3D CLPP the Figure 12
and 13 shows the Container ship arrangement for the
best solutions found for instance I = 1 when the
weights are set as (α=1, β=0) and (α=0, β=1),
respectively.
Figure 12: The Container ship occupation in port 2 for the
better solution found with (α=1, β=0).
Figure 13: The Container ship occupation in port 2 for the
better solution found with (α=0, β=1).
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
140

6 CONCLUSIONS AND FUTURE
WORK
This Article shows, for the first time, a new
representation for the 3D Container ship loading
planning problem (3D CLPP) that has the following
advantages:
• It allows a compact encoding by representing
the solution as a vector with P elements instead of
(R x C) x ( P+P
3
) binary variables, which enables a
large-scale problem solving.
• The skilled personnel experience can be
incorporated in the optimization process under the
form of a rule and a computational simulation.
• The solutions with this encoding are always
feasible, which avoids the problem of processing
time consumption to make solutions feasible.
This new encoding gives great savings in
computational time and produced solutions with
good quality, and, in some instances, the optimality
is reached or almost reached, showing that this
approach is promising.
One promising idea for future work is to codify
in the form of rules the previous approaches
proposed for the Container ship problem.
Other idea is that future work must address this
3D CLPP with methods that deals with pareto-
optimal frontier in order to choose the solutions
ACKNOWLEDGEMENTS
This research was supported by the Foundation for
the Support of Research of the State of São Paulo
(FAPESP) under the process 2010/51274-5 and
Brazilian Council for the Development of Science
and Technology (CNPq). Also, the authors would
like to thank the anonymous reviewer for their
valuable comments, which helped to clarify and
improve the contents of this paper.
REFERENCES
Ambrosino, D.; Sciomachen A.; Tanfani, E., 2006. A
decomposition heuristics for the container ship
stowage problem, J. Heuristics, v.12, p. 211–233.
Ambrosino, D., Anghinolfi, D., Paolucci, M., Sciomachen,
A., 2010. An Experimental Comparison of Different
Heuristics for the Master Bay Plan Problem. In SEA,
314-325.
Avriel, M.; Penn, M., 1993. Container ship stowage
problem, Computers and Industrial Engineering, v. 25,
p. 271-274.
Avriel, M.; Penn, M.; Shpirer, N.; Wittenboon, S., 1998.
Stowage planning for container ships to reduce the
number of shifts, Annals of Operations Research, v.
76, p. 55-71.
Avriel, M.; Penn, M.; Shpirer, N., 2000. Container ship
stowage problem: complexity and connection to the
coloring of circle graphs, Discrete Applied
Mathematics, v. 103, p. 271-279.
Della Croce, F.; T'kindt, V., 2002. A Recovering Beam
Search Algorithm for the One-Machine Dynamic Total
Completion Time Scheduling Problem, Journal of the
Operational Research Society, vol 54, pp. 1275-1280.
Dubrovsky, O.; Levitin, G., Penn, M., 2002. A Genetic
Algorithm with a Compact Solution Encoding for the
Container Ship Stowage Problem, Journal of
Heuristics, v. 8, p. 585-599.
Lowerre, B. T.; 1976. The HARPY Speech Recognition
System, PhD. thesis, Carnegie-Mellon University,
USA, 1976.
Ow, P. S, Morton, T. E., 1988. Filtered Beam Search in
Scheduling, International Journal of Production
Research, vol. 26, pp. 35-62.
Ribeiro, C. M., Azevedo, A. T., Teixeira, R. F., Problem
of Assignment Cells to Switches in a Cellular Mobile
Network via Beam Search Method, WSEAS
Transactions on Communications, vol 1, pp. 11-21,
2010.
Valente, J. M. S; Alves, R. A. F. S., 2005. Filtered and
Recovering Beam Search Algorithm for the
Early/Tardy Scheduling Problem with No Idle Time,
Computers & Industrial Engineering, vol. 48, pp. 363-
375, 2005.
Wilson, I.; Roach, P. Container stowage planning: a
methodology for generating computerised solutions,
Journal of the Operational Research Society, v. 51, p.
1248-1255, 2000.
SOLVING THE 3D CONTAINER SHIP LOADING PLANNING PROBLEM BY REPRESENTATION BY RULES AND
BEAM SEARCH
141
