
LINE HISTOGRAM
A Fast Method for Rotated Rectangular Area Histogramming
Zhiqiang Hou
1
, Sion Hannuna
2
, Xianghua Xie
3
and Majid Mirmehdi
2
1
Xi’an Jiaotong University, Shaanxi, P.R. China
2
Department of Computer Science, University of Bristol, Bristol, U.K.
3
Department of Computer Science, University of Swansea, Swansea, U.K.
Keywords:
Line histogram, Integral histogram, Efficient histogramming.
Abstract:
We propose a novel approach to executing exhaustive histogram search, which incorporates a process to rotate
the template used in a computationally efficient manner, e.g. for tracking applications where object rotation
will require template rotation. The method is particularly applicable to rectangular templates as any rotation
in the region of interest will greatly reduce the potential for a satisfactory match. We present a computational
analysis of our proposed method, followed by comparative experimental results.
1 INTRODUCTION
The histogram is an important tool in computer vision
and is used for a variety of purposes, such as image
segmentation (Puzicha et al., 1999; Tobias and Seara,
2002), image retrieval (Brunelli and Mich, 2001;
Huang et al., 1997), object detection (Laptev, 2009;
Viola and Jones, 2001; Viola and Jones, 2004) and
visual tracking (Comaniciu et al., 2003; Czyz et al.,
2007; Nummiaro et al., 2003; Perez et al., 2002).
This paper is concerned with efficient histogram con-
struction for exhaustive image search, with flexible
image regions such as rotated rectangles in arbitrary
directions. The proposed technique benefits any al-
gorithm which extracts histograms from regions that
are rotating over time. For example, in aerial imag-
ing (Doretto and Yao, 2010), video and images tend to
be acquired at a fixed altitude with minimal pan or tilt
taking place and the primary motionsproducing trans-
lation and rotation of the image plane. Another ex-
ample is in human pose estimation where body parts
are often modelled as cylinders which have corre-
sponding rectangular regions in the image plane, e.g.
Ramanan and Forsyth (Ramanan and Forsyth, 2003)
use colour histograms within this type of paradigm
to learn human appearance. The line histogram ap-
proach described here could speed up many such ap-
plications.
One of the major impediments in direct histogram
construction is its computational complexity, and
while an exhaustive search is guaranteed to find the
global minimum, it is often avoided by performing lo-
calised searches, e.g., in particle filtering (Czyz et al.,
2007; Nummiaro et al., 2003; Perez et al., 2002) and
mean shift (Comaniciu et al., 2003; Zhao and Tao,
2009), at the expense of accuracy, i.e. only local
minima are obtained (Porikli, 2005; Sizintsev et al.,
2008).
The integral histogram is rooted in computer
graphics, where Crow (Crow, 1984) first introduced
the summed-area table method for texture mapping.
This inspired Viola and Jones (Viola and Jones, 2004)
to propose a new image representation called an in-
tegral image in order to efficiently extract features
from rectangular regions in images. The integral im-
age representation, which can be calculated in linear
time, is a cumulative function where each element
contains the sum of the pixel values above and to the
left of the location of the element. This representa-
tion was adopted by Porikli et al. (Porikli, 2005) to
construct the so called integral histogram (IH) for effi-
cient histogram-based exhaustivesearch. For each bin
of the histogram, an integral image was constructed
to count the accumulative number of pixels falling
into the bin. The histogram of rectangular regions
was then efficiently obtained by accessing those in-
tegral images using simple arithmetic operations. Re-
gional statistics, such as covariance, can also be ef-
ficiently computed using integral histograms (Porikli
and Tuzel, 2006). Further computational improve-
ment can be achieved through, for example, adaptive
approximation (Muller et al., 2008).
126
Hou Z., Hannuna S., Xie X. and Mirmehdi M. (2012).
LINE HISTOGRAM - A Fast Method for Rotated Rectangular Area Histogramming.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 126-134
DOI: 10.5220/0003760401260134
Copyright
c
SciTePress

(a) Original image (b) no rotation (CH, IH, or DH) (c) with rotation (LH)
Figure 1: Example of conventional histogram (CH) template match (or IH (Porikli, 2005) or DH (Sizintsev et al., 2008))
against the proposed method (LH).
Earlier works in efficient median filtering, such as
(Huang et al., 1979), also inspired the development
of efficient exhaustive search algorithms. In (Huang
et al., 1979), Huang et al. made use of overlapping
pixels between adjacent windows to address the re-
dundancy along a row in computing the histograms
for median filtering. However,no redundancy was ex-
ploited between rows. Perreault and H´ebert (Perreault
and Hebert, 2007) extended (Huang et al., 1979)’s
work by removing redundancies both within row and
between rows based on the principle of histogram dis-
tributivity, that is the histogram of two disjoint re-
gions is simply a summation of histograms of those
individual regions. The rectangular region of interest
was broken up into a union of its columns, each of
which maintained its own histogram. The histogram
for the region was then computed by summing those
adjacent column histograms. This work was followed
by Sizintsev et al. (Sizintsev et al., 2008) who con-
structed the distributive histogram (DH) based on the
principles laid in (Perreault and Hebert, 2007) and
used it for very fast, exhaustive histogram search for
object detection. They also showed that this distribu-
tivity can be useful in computing regional statistics,
such as mean and covariance matrices.
Recently, Wei and Tao (Wei and Tao, 2010) op-
timised histogram based searches by calculating the
objective function in an incremental fashion. Their
research complements Porikli et al.’s (Porikli, 2005)
IH and Sizintsev et al.’s (Sizintsev et al., 2008) DH
fast exhaustive searches. However, histogram con-
struction using the IH or DH methods is generally
carried out on regular rectangular regions, i.e. they
are explicitly designed for unrotated rectangular re-
gions. For example, in the case of IH, the integral
images for histogram bins are constructed as integra-
tion along image coordinates. This may force the ex-
haustive search to result in undesirable local minima,
since the region of interest is subject to arbitrary rota-
tions. A square shape is thus often used; however, this
may compromise the representativeness of the target
histogram since it can include more irrelevant regions
due to a sub-optimal bounding box. The DH suffers
from similar difficulties, since there is also no mecha-
nism in DH to take into account object rotations. The
histogram initialisation process of DH would have to
be repeated for each possible rotation, which is cum-
bersome to say the least. Here, we propose a method
that can handle arbitrary rotations, and can be used
to build on the localisation performance of IH and
DH to generate even more optimal matches, e.g. see
Fig. 1. Indeed, as it will be shown later, disregarding
object rotation can in fact lead to complete tracking
failure. Furthermore, rotational information is impor-
tant in determining orientation of objects, e.g. (Zhao
and Tao, 2009). In (Lienhart and Maydt, 2002), Lien-
hart and Maydt used the rotated summed area table
or integral image to compute histograms of rectangu-
lar regions with 45
◦
rotation. However, this strategy
is impractical and inefficient for arbitrary rotations.
Moreover, the shape can take any arbitrary form.
Here, we present a simple, flexible and efficient
histogram-based exhaustive search method. We also
exploit the distributivity of histogram representation,
by using vertical or horizontal line integration to
obtain rotated histogram representation, instead of
confining the process to regular rectangular regions.
Hence, we refer to our histogram representation as
the line histogram or LH. One significant difference
between the proposed LH and IH is that the IH pre-
pares histogram initialisation using rectangular areas
whereas ours can use rows or columns to conveniently
form arbitrarily shaped regions. This leads to a sig-
nificant advantage in handling non-rectangular region
histograms in a computationally cheap and memory
efficient manner. However, without losing general-
ity and for the ease of comparison with IH and DH,
in this paper we use rotated rectangular area his-
tograms. The proposed method also allows adaptive
change of template size in exhaustive search without
re-initiating the histogram generation process as in the
DH method.
Note in this work we develop the LH in the spirit
of the works that introduced the IH (Porikli, 2005)
LINE HISTOGRAM - A Fast Method for Rotated Rectangular Area Histogramming
127

and DH (Sizintsev et al., 2008) where a template of
an object is available and one or more unseen frames
are searched to optimally locate the template - for ob-
ject detection or tracking purposes. The rest of the
paper is organized as follows. Section 2 describes
the proposed LH method. In Section 3, we present
a computational analysis of LH. Experimental results
are shown in Section 4 and we conclude the paper in
Section 5.
2 LINE HISTOGRAM
Image histograms provide a quantized representation
of an image’s intensity or colour distribution, the
granularity of which is determined by the number of
bins used. An important property is that histograms
for non-intersecting regions may be summed (Per-
reault and Hebert, 2007; Sizintsev et al., 2008) as
S(A∪ B) = S(A) + S(B) (1)
where S(.) is a histogram and A and B are two im-
age regions which may or may not be connected.
This property forms the foundation of the integral his-
togram and distributive histogram techniques and also
underpins the line histogram technique proposedhere.
When obtaining a single histogram for a whole
image, or subset of an image, it is optimal to generate
the distribution directly from the pixel data. However,
when performing a task that requires histograms to be
calculated for overlapping regions, e.g. in an exhaus-
tive search, significant computational savings may be
gained by precomputing an image’s histogram. For
example, the IH (Porikli, 2005) extends the concept
of the integral image (Crow, 1984) by precomput-
ing histograms at every pixel location such that the
stored histogram at a given pixel describes the dis-
trbution of the subimage contained within the upper
left of that location. This allows an arbitrarily sized
and positioned histogram to be efficiently calculated
from a combination of four previously determined
histograms. The DH (Sizintsev et al., 2008) precom-
putes column histograms for a subset of an image,
such that it is specifically tailored to an exhaustive
search. The proposed LH method is, in some sense,
an extension of the DH in that column histograms are
also precomputed, but for full length columns, that
span the entire image.
Our LH approach has three phases: an exhaustive
search, followed by line histogram initialisation, and
finally rotational search. The exhaustive search gen-
erates similarity scores for each pixel location. Initial-
isation precomputes column histograms for the entire
image, with each location in a column containing the
Figure 2: Histogram initialisation.
histogram of all the pixels from the first position to
the current position. For rotational search, the tem-
plate is rotated through 1
◦
→ 180
◦
and the orientation
and position yielding the best similarity score is se-
lected.
Exhaustive Search. The first stage of the algo-
rithm is to perform an exhaustive search of the en-
tire image, retaining a subset of image locations most
closely matching the unrotated search template. The
DH is an extremely fast technique and is applied to
this end in our proposed LH method. The question
of how many close matches to retain for further at-
tention is not trivial and has thus far been determined
empirically. By enforcing a minimum distance be-
tween matches, based on the image size, it is possible
to ensure that all the matches are not so tightly clus-
tered that potential matches are overlooked. If only a
few matches are retained, or if they are localized to
a sub-area of the image, it is possible to initialise the
LH for small areas containing the matches. This po-
tentially offers additional computational savings. We
will touch on this again but later below LH initialisa-
tion is explained for the whole image. To perform his-
togram matching in general, there are many measures
that can be used, e.g. the L
1
norm, Bhattacharrya dis-
tance, Earth Mover’s distance, or χ
2
difference. Here,
we use the L
1
norm on 64-bin histograms.
Histogram Initialisation. Consider an image, P,
with M rows and N columns. The inititialized LH will
then be a M × N × B matrix, where B is the number
of bins. Starting at the first row, histograms are calcu-
lated at each pixel location along each column, with
each location’s histogram describing the distribution
of the pixel located at that position and all those above
it on that column (see Fig. 2). In practice, this in-
volves performing a memory copy of the histogram
immediately above the current location and then in-
crementing the bin corresponding to the current pixel.
Note the histogram of the first pixel marked p(1, n) in
column n is S(p(1, n)) and includes one pixel p(1, n),
the histogram of the second pixel marked p(2, n) in
column n is S(p(2, n)) and includes two pixels p(1, n),
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
128
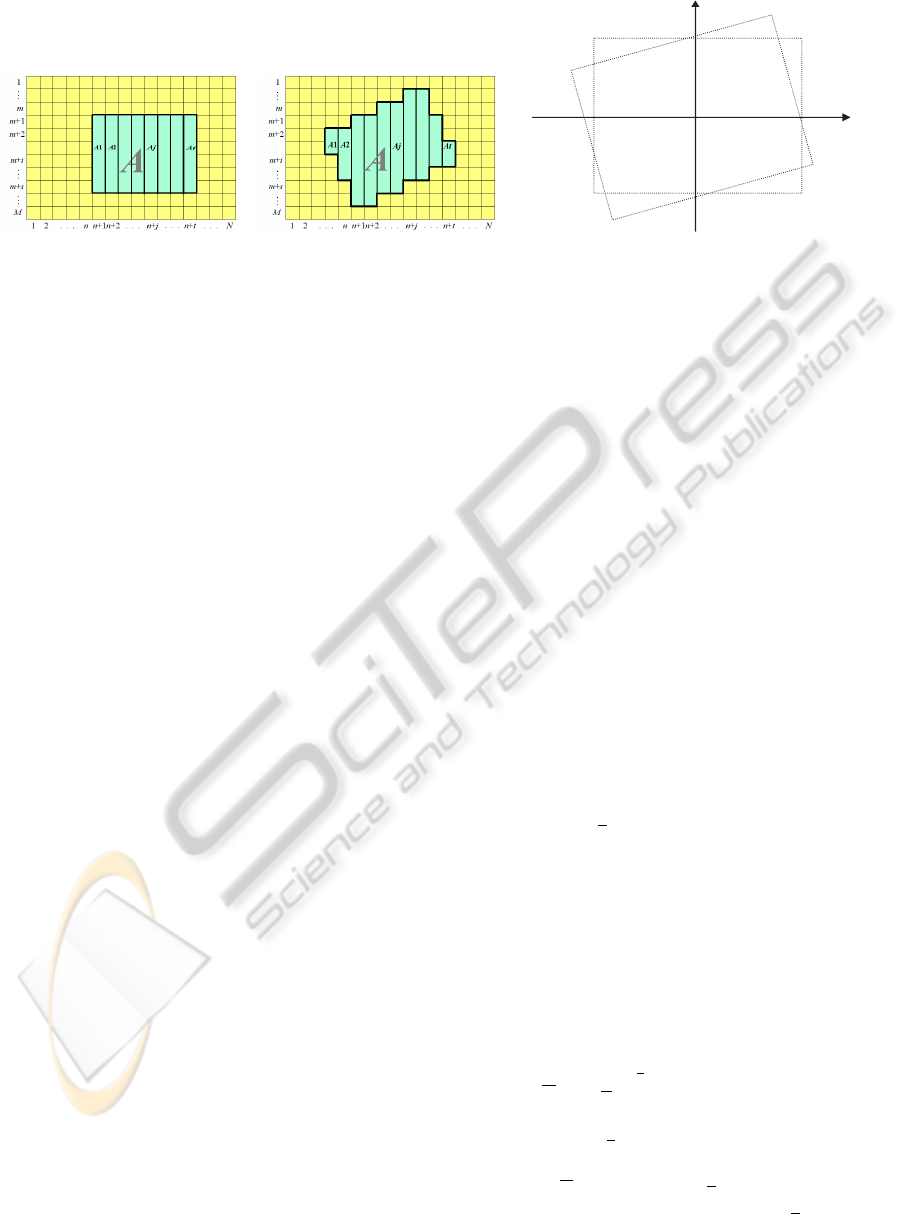
(a) Unrotated template (b) Rotated template
[x
2
, y
2
]
[
x
2
', y
2
']
[x
1
', y
1
']
[x
1
, y
1
]
0
y
x
(c) Rotated template
Figure 3: (a) and (b) Area histogram calculation for unrotated and rotated templates respectively, and (c) effect of rotating
template on horizontal displacement.
p(2, n), and the histogram of the m
th
pixel marked
p(m, n) in column n is S(p(m, n)) and includes m pix-
els. This process is repeated for each column in the
image so that location M in each column contains the
histogram for that entire column. This could be per-
formed for rows instead of columns, but for the sake
of clarity, columns are considered in the proceeding
discussion.
Rotational Search. Once the LH has been initial-
ized, (1) may be exploited to efficiently calculate
histograms for arbitrarily orientated and sized re-
gions. Fig. 3(a) illustrates a rectangular region, A,
subdivided into columns A
1
to A
t
. Each column’s
histogram is obtained by subtracting the histogram
stored immediately above the start of a column from
that at the last pixel in that column:
S(A
j
) = S(p(m+ s,n+ j)) − S(p(m, n+ j)) (2)
where (m, n) is the origin of the area histogram A, j =
1, . . . , t, and s is the length of column j. Next, the sub-
histograms, S(A
j
), are summed to yield the histogram
for A:
S(A) = S(A
1
)+S(A
2
)+· · · + S(A
j
)+· · · + S(A
t
) (3)
The discussion above refers to the unrotated rectangu-
lar template, but is equally applicable to a rotated one
in Fig. 3(b). All that is required are the start and end
points for each column across the template’s width.
In our implementation this is achieved by consider-
ing the line equations for the rectangle’s four sides at
0
◦
to 90
◦
when its centroid is at the origin. Start and
end points are computed for all orientations and these
may be used by simply adding the current search co-
ordinates to them.
3 COMPUTATIONAL ANALYSIS
The proposed LH method for rotated rectangular his-
tograms can offer significant computational savings
over a naive approach where histograms are calcu-
lated from scratch, pixel by pixel. Combining his-
tograms requires that corresponding bin counts are
added or subtracted from one another. Hence, the
greater the number of bins used, the more com-
putationally expensive the LH technique becomes.
The naive approach does not involve combining his-
tograms, so is independent of bin count. It is, how-
ever, very sensitive to template size as the number of
operations required goes with the square of its length.
In simple terms, the LH approach offers the greater
savings for larger templates and fewer histogram bins.
We next consider the cost of generating his-
tograms for our rotated rectangular search templates.
The cost of calculating pixel by pixel conventional
histograms (CH) is independent of rectangle orienta-
tion because the cost is proportional to search area,
which is not a function of angle. For LH, the width
of the template and hence the number of columns re-
quired is dependent on the rectangle’s orientation (see
Fig. 3(c)). Note that for anticlockwise rotation by an
angle θ (0 < θ <
π
2
), the maximum width, w
rot
, of the
template is x
′
2
− x
′
1
. For rotation about the origin
x
′
2
− x
′
1
= (x
2
− x
1
)cosθ − (y
2
− y
1
)sinθ (4)
If w and h are the height and width of the search tem-
plate, (4) simplifies to:
w
rot
= wcosθ+ hsinθ (5)
Note the sign has changed because (y
2
− y
1
) < 0. The
mean value of w
rot
is:
w
rot
=
2
π
Z π
2
0
wcosθ+ hsinθdθ (6)
which resolves to
2
π
(w+ h). Hence, for a unit length
square template the mean number of columns to be
considered, w
rot
, over a full
π
2
anticlockwise rota-
tion is the mean value of this function:
4
π
, which is
approximately 1.27. For more elongated templates,
LINE HISTOGRAM - A Fast Method for Rotated Rectangular Area Histogramming
129

e.g. where the height is 10 and the width 50, w
rot
is
around 38.2. This is important as it shows that less
column histograms have to be summed, on average,
than for the full width of the template, reducing cost.
Of course the conventional cost is also lower in this
case as the area is less.
Without loss of generality, consider a square im-
age P of size M × M and histogram with B bins, and
rectangular template T of size w× h. Using the same
entities operated in (Sizintsev et al., 2008), we set d
for division, f for floor and type conversion, and a
for addition or subtraction.The CH approach operates
on wh pixels for each template orientation and loca-
tion. Operations include: 1 division and 1 floor to
find the histogram bin, and this bin is incremented us-
ing 1 addition. So the total computational cost of the
CH approach for a single orientation and location is
wh(d + f + a) and for multiple locations and orienta-
tions is
n
loc
n
angle
wh(d + f + a), (7)
where n
loc
and n
angle
are the number of locations and
angles examined respectively. The LH method re-
quires 1 histogram addition and 1 subtraction to gen-
erate histograms for each column and then w
rot
addi-
tions to combine them to produce the histogram for
the entire area. Hence for n
loc
locations and n
angle
angles the operations are:
n
loc
n
angle
2w
rot
Ba (8)
However, there is also the LH initialisation cost. Ex-
cluding the cost of the memory copies, when moving
down each column, this is
M
2
(d + f + a) (9)
The costs deduced in the above discussion are sum-
marized in Table 1. Recall that w
rot
is a linear com-
bination of w and h so as they are increased LH be-
comes cheaper relative to CH. Conversely as B is in-
creased, the relative cost for LH goes up. Further-
more, to benefit from the relative cheapness of LH for
rotation, n
loc
and n
angle
must be high enough to off-
set the initialisation cost of LH. In practical terms CH
and LH take the same time to execute, where B = 64,
w = 33, h = 19, n
loc
= 5, n
angle
= 180 and M = 277.
Note, the relative savings can be massively increased
by reducing M, initialising LH for a subset of the im-
age, or if many locations are being searched, reducing
B, using a more compact colour space representation,
e.g. HSV, which was used by Sizintsev et al (Sizintsev
et al., 2008), who set B to 16.
Histogram Memory Requirements. For an M × M
image and histogram representation with B bins, our
LH approach, like the IH, requires M
2
B units of mem-
ory. However, for small images with height < 256
pixels, it is only necessary to use unsigned chars for
each unit and unsigned short integers will always pro-
vide ample capacity for larger images. This contrasts
with the IH approach which can be subject to over-
flow errors (Sizintsev et al., 2008) and requires 4 byte
integers as storage units. Furthermore, it is not always
necessary to initialise the LH for the entire image re-
gion so other potential avenues for reducing memory
requirement are available.
4 EXPERIMENTAL RESULTS
This section has two main objectives: firstly to
demonstrate how detection accuracy is improved us-
ing a rotating rectangular template and secondly to
show how and when the line histogram method is
computationally more efficient than the conventional
approach. Fig. 4 shows the templates used in the var-
ious examples presented in this paper for reference.
a b c d
e f g
Figure 4: Templates: (a) Taxi sequence, (b) and (c) square
and rectangular templates, (d) and (e) for face tracking in
Girl and Villains, (f) and (g) for tracking multiple objects in
Road.
Fig. 5 presents two frames of the Taxi sequence
where the benefits of employing a rotating template
is illustrated. The match maps in Figs. 5(b) and
5(f) clearly show two spatially disparate local minima
which leads to incorrect detection in Fig. 5(g) for the
unrotated histogram. Furthermore, note how the tem-
plate boundary completely encompasses the object of
interest in 5(d) for the proposed method, whereas in
Fig. 5(c) the fit is less accurate without rotation, i.e.
as the result of IH or DH.
Fig. 6 compares the relevance of using rotated
templates for square and rectangular regions at sam-
ple rotations. The top row shows the conventional
output, i.e. again for IH, or DH, and the bottom row
presents the results for the proposed LH method. The
contrast in the results is far more striking when a rect-
angular region is being detected as there is no way
to effectively align elongated regions at different ori-
entations. The accuracy of the detection combined
with its discovered orientation can benefit higher level
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
130
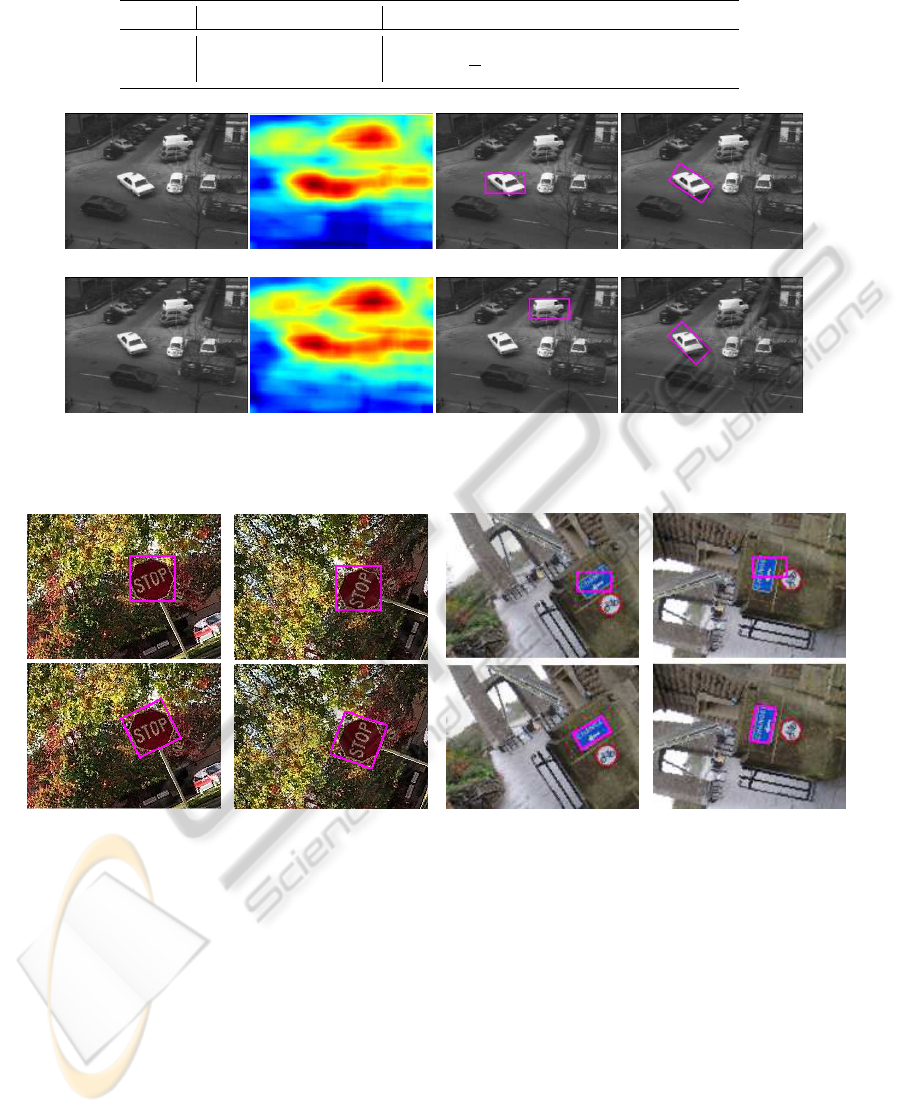
Table 1: Comparison of computational cost.
Method sequencesInitialisation Rotated Template Histogram Calculation
CH 0 n
loc
n
angle
wh(d + f + a)
LH M
2
(d + f + a) n
loc
n
angle
2w
rot
Ba
(a) Frame 26 (b) match map (c) Unrotated (d) Rotated
(e) Frame 39 (f) match map (g) Unrotated (h) Rotated
Figure 5: Sequence Taxi, comparing results on two different frames. Note the inaccuracy or loss of representation for the
conventional unrotated approaches.
(a) 25
◦
(b) 70
◦
(c) 35
◦
(d) 80
◦
Figure 6: Finding a rotated object using square and rectangular templates at various rotations - top row: unrotated template
approaches (IH or DH), bottom row: LH.
recognition processes. Fig. 7 shows histogram sim-
ilarity distances at different rotation angles for the
square and rectangular templates in Fig. 6. Note
how far greater returns are gained for the rectangu-
lar template relative to the square template. The latter
shows maximum error at around 40
◦
whereas the for-
mer peaks at around 90
◦
.
In Fig. 8, the results of applying histogram detec-
tion to face tracking are shown in frames from two
different sequences, Girl and Villains. In both se-
quences superior alignment is achieved with LH’s ro-
tating template and the face orientation is revealed.
Figs. 8(i) and 8(j) illustrate how varying rotational
angle yields a minimal similarity distance for a fixed
location for the frames used in Fig. 8. Further-
more, Table 2 lists the improved similarity scores and
agreement with handlabeled groundtruth using rotat-
ing templates in the two frames.
We have so far illustrated the benefits of rotating a
rectangular search template when performing an ex-
haustive histogram-based search. Next, we demon-
strate empirically the savings made when calculat-
ing rotated histograms using the LH approach on a
3.2GHz CPU PC under Win XP, with 3GB RAM. All
the code was written in C++.
Table 3 shows the computational times for the var-
ious stages of an exhaustive search, including rota-
tion, for a single frame for different sequences and
LINE HISTOGRAM - A Fast Method for Rotated Rectangular Area Histogramming
131
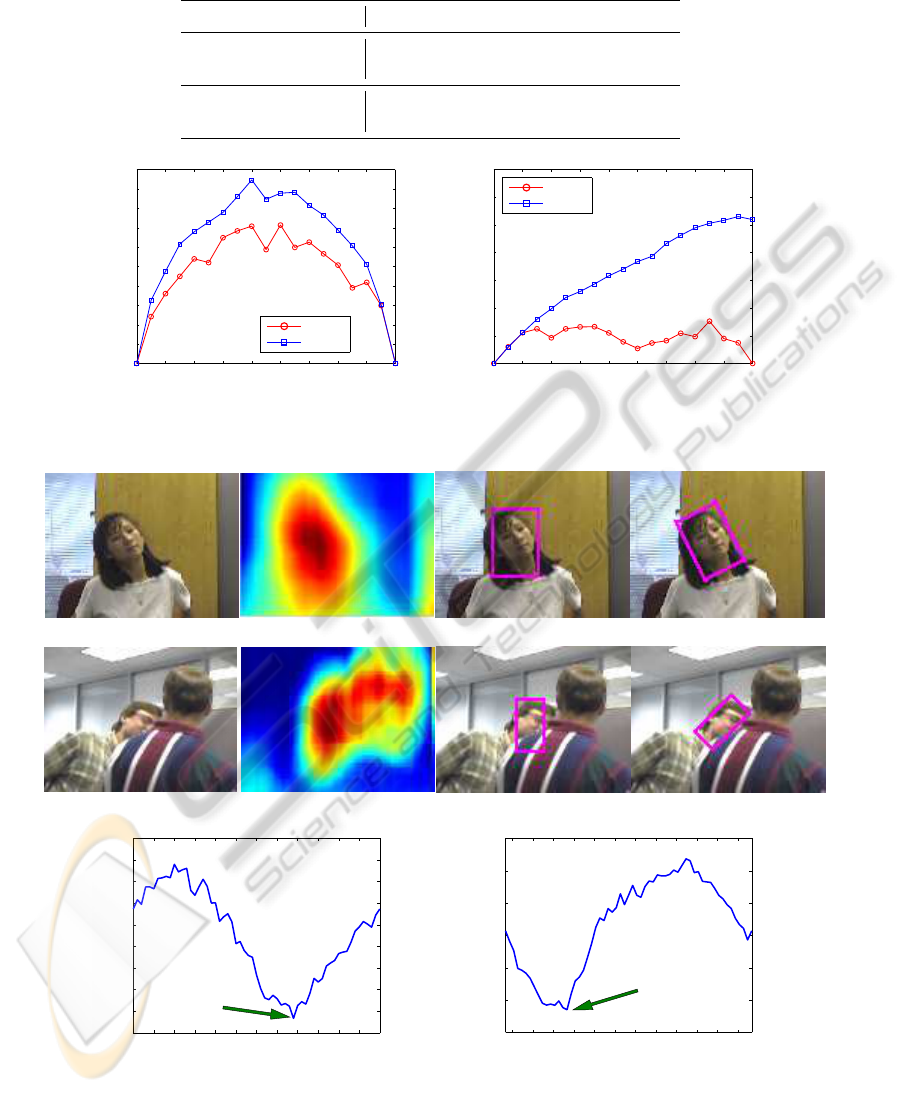
Table 2: Comparison of groundtruth and predicted positions for unrotated and rotated templates. The similarity distance is
under the (L
1
norm) column
Image Groundtruth Method Predicted Angle L
1
norm
Girl (46,54) Unrotated (48,54) 0
◦
0.144
frame 69 Rotated (47,54) 27
◦
0.127
Villains (51,61) Unrotated (52,62) 0
◦
0.363
frame 14 Rotated (51,61) −45
◦
0.294
0 10 20 30 40 50 60 70 80 90
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
SH
IH & DH
Rotation angle
Dissimilarity (L1)
10 20 30 40 50 60 70 80 90
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
SH
IH & DH
Rotation angle
Dissimilarity (L1)
Figure 7: The comparative histogram similarity results for the square (left) and rectangular (right) templates in Fig. 6 with
and without rotation.
(a) frame 69 (b) match map (c) Unrotated (d) Rotated: LH
(e) frame 14 (f) match map (g) Unrotated (h) Rotated: LH
−90 −75 −60 −45 −30 −15 0 15 30 45 60 75 90
0.12
0.13
0.14
0.15
0.16
0.17
0.18
0.19
0.2
0.21
Rotation angle
Dissimilarity (L1)
Best L1 at 27
o
(i) at pixel (47,54)
−85 −70 −55 −40 −25 −10 5 20 35 50 65 80
0.3
0.32
0.34
0.36
0.38
0.4
Best L1 at -45
o
Rotation angle
Dissimilarity (L1)
(j) at pixel (51,61)
Figure 8: Face tracking examples, sequences Girl and Villain, (top and middle rows, from left) original, histogram distance
map, unrotated result e.g. IH or DH, and LH’s rotated result. (bottom row) minimum dissimilarity measure for each frame.
template shapes. The number of locations searched,
n
loc
, is 5, the number of orientations examined, n
angle
,
is 180, and the number of bins, B, is 64. For each
of the four sequences, running times are provided for
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
132

Table 3: Running time (in ms) comparisons for various templates.
Sequence Image size Template size DH search time Init. time Rotate time Total
Girl (CH) 128× 96 31× 45 1.78 0 64.41 66.19
Girl (LH) 128× 96 31× 45 1.78 2.45 9.11 13.34
Villains (CH) 128× 96 19× 35 2.26 0 30.98 33.24
Villains (LH) 128× 96 19× 35 2.26 2.55 6.10 10.91
Square (CH) 480× 360 47× 47 54.10 0 307.03 361.13
Square (LH) 480× 360 47× 47 54.10 51.22 26.68 132.00
Rectangle (CH) 320× 240 35× 19 25.50 0 24.73 50.23
Rectangle (LH) 320× 240 35× 19 25.50 20.71 5.16 51.37
(a) Frame 10 (b) Frame 28 (c) Frame 57 (d) Frame 66
Figure 9: Sequence Road, an example of tracking multiple objects.
rotated templates calculated in a pixel by pixel fash-
ion (CH) and using LH. Note that the DH search
time is the same for CH and LH as it is the optimal
method for finding candidate locations to apply rota-
tion. These results show excellent agreement with the
computational costs determined analytically in Sec-
tion 3 and summarized in Table 1. Larger images re-
quire longer LH initialisation times whilst larger tem-
plates are relatively expensive to calculate using CH.
For example, the ‘Girl’ sequence is processed five
times as quickly using LH as the image is small and
the template relatively large. Indeed, using LH in con-
junction with DH, a rate of 75fps is achieved. On the
other hand, for the ‘Rectangle’ sequence, LH and CH
take around the same time to execute as the image is
larger and the template smaller.
5 CONCLUSIONS
We proposed the Line Histogram, a new method to
compute a rotated histogram which is based on sub-
histograms along columns of a region. The method
is fast and can be used in real-time applications for
object detection and tracking, single, or multiple (e.g.
see Fig. 9). We outline its computational performance
analytically and through several experiments.
ACKNOWLEDGEMENTS
This paper is supported by National Natural Sci-
ence Foundation of P.R.China(60805015,61175029)
and Shaanxi Province Natural Science Founda-
tion(2011JM8015).
REFERENCES
Brunelli, R. and Mich, O. (2001). Histograms analysis for
image retrieval. PR, 34(8):1625–1637.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based object tracking. IEEE T-PAMI, 25(5):564–577.
Crow, F. (1984). Summed-area tables for texture mapping.
ACM Computer Graphics, 18(3):207–212.
Czyz, J., Ristic, B., and Macq, B. (2007). A particle filter
for joint detection and tracking of color objects. IVC,
25(8):1271–1281.
Doretto, G. and Yao, Y. (2010). Region Moments: Fast
invariant descriptors for detecting small image struc-
tures. In IEEE CVPR.
Huang, J., Kumar, R., Mitra, M., Zhu, W., and Zabih, R.
(1997). Image indexing using color correlograms. In
IEEE CVPR, pages 762–768.
Huang, T., Yang, G., and Tang, G. (1979). A fast two-
dimensional median filtering algorithm. IEEE T-
ASSP, 27(1):13–18.
Laptev, I. (2009). Improving object detection with boosted
histograms. IVC, 27(5):535–544.
Lienhart, R. and Maydt, J. (2002). An extended set of haar-
like features for rapid object detection. In IEEE ICIP,
pages 900–903.
LINE HISTOGRAM - A Fast Method for Rotated Rectangular Area Histogramming
133

Muller, T., Lenz, C., Barner, S., and Knoll, A. (2008). Ac-
celerating integral histograms using an adaptive ap-
proach. In ICISP, pages 209–217.
Nummiaro, K., Koller-Meier, E., and Gool, L. (2003). An
adaptive color-based particle filter. IVC, 21(1):99–
110.
Perez, P., Hue, C., Vermaak, J., and Gangnet, M. (2002).
Color-based probabilistic tracking. In ECCV, pages
661–675.
Perreault, S. and Hebert, P. (2007). Median filtering in con-
stant time. IEEE T-IP, 16(9):2389–2394.
Porikli, F. (2005). Integral histogram: A fast way to extract
histograms in cartesian spaces. In IEEE CVPR, pages
829–836.
Porikli, F. and Tuzel, O. (2006). Fast construction of co-
variance matrices for arbitrary size image windows.
In IEEE ICIP, pages 1581–1584.
Puzicha, J., Hofmann, T., and Buhmann, J. (1999). His-
togram clustering for unsupervised image segmenta-
tion. In IEEE CVPR, pages 602–608.
Ramanan, D. and Forsyth, D. (2003). Finding and tracking
people from the bottom up. In IEEE CVPR, pages
467–474.
Sizintsev, M., Derpanis, K., and Hogue, A. (2008).
Histogram-based search: a comparative study. In
IEEE CVPR, pages 1–8.
Tobias, O. and Seara, R. (2002). Image segmentation by
histogram thresholding using fuzzy sets. IEEE T-IP,
11(12):1457–1465.
Viola, P. and Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features. In IEEE CVPR,
pages 511–518.
Viola, P. and Jones, M. (2004). Robust real-time face detec-
tion. IJCV, 57(2):137–154.
Wei, Y. and Tao, L. (2010). Efficient histogram-based slid-
ing window. In CVPR, pages 3003–3010.
Zhao, Q. and Tao, H. (2009). A motion observable repre-
sentation using color correlogram and its applications
to visual tracking. CVIU, 113(2):273–290.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
134
