
EVALUATING VEHICLE ROUTING PROBLEMS
WITH SUSTAINABILITY COSTS
Ignacio Eguia, Jesus Racero
and Fernando Guerrero
Department of Management Science, University of Seville, Camino de los Descubrimientoss/n, 41092, Seville, Spain
Keywords: Routing, Green Logistics, Linear Programming, Mathematical Modelling.
Abstract: In this paper, we study the road freight transportation activities, which are significant sources of air
pollution, noise and greenhouse gas emissions, with the former known to have harmful effects on human
health and the latter, responsible for global warming. Specifically, an extension of the classical Capacitated
Vehicle Routing Problem is presented, including realistic assumptions (Time Windows, Backhauls and
Heterogeneous Fleet with different vehicles and fuel types). The decisions are aimed at the selection of
vehicle and fuel types, the scheduling of deliveries and pick-up processes and the consolidation of freight
flows. The classical objective functions of minimizing the total travel distance or the internal costs (driver,
fuel or maintenance) are extended to other sustainable measures: the amount of air pollution and greenhouse
gas emissions, the energy consumption and their costs. A mathematical model is described and an
illustrative example is performed.
1 INTRODUCTION
Environmental issues can impact on numerous
logistical decisions throughout the supply chain such
as location, sourcing of raw material, modal
selection, and transport planning, among others.
Green logistics extends the traditional definition of
logistics by explicitly considering other external
factors associated mainly with climate change, air
pollution, noise, vibration and accidents.
The logistical activities comprise freight
transport, storage, inventory management, materials
handling and all the related information processing.
In this paper, we study the road freight
transportation activities, which are significant
sources of air pollution, noise and greenhouse gas
emissions, with the former known to have harmful
effects on human health and the latter, responsible
for global warming.
An eco-efficiency model of the classical Vehicle
Routing Problem with some realistic assumptions
(Heterogeneous Fleet, Time Windows and
Backhauls) is presented with a broader objective
function that accounts not just for the internal costs
(driver, fuel, maintenance,…), but also for external
costs (greenhouse emissions, air pollution, noise,…).
With this new mixed-integer linear programming
(MILP) model, transportation companies can have
positive environmental effects by making some
operational changes in their logistics system,
selecting the most appropriate vehicles, determining
the routes and schedules to satisfy the demands of
the customers, reducing externalities and achieving a
more sustainable balance between economic,
environmental and social objectives.
This paper is structured as follows. In the next
section, a review of existing literature in VRP is
presented. The different externalities are analyzed
and their costs are internalized in Section 3. Section
4 provides a formal description of the problem and
the mathematical model. Section 5 illustrates the
proposed approach on a four-node example. An
analysis of the illustrative example is presented in
Section 6. Finally, conclusions and references are
presented.
2 LITERATURE REVIEW
The Vehicle Routing Problem (VRP) is a well
known problem in operational research where the
optimal routes of delivery or collection from one or
several depots to a number of customers are found,
while satisfying some constraints and minimizing
the total distance travelled. Huge research efforts
have been devoted to studying the VRP since 1959
175
Eguia I., Racero J. and Guerrero F..
EVALUATING VEHICLE ROUTING PROBLEMS WITH SUSTAINABILITY COSTS.
DOI: 10.5220/0003760601750180
In Proceedings of the 1st International Conference on Operations Research and Enterprise Systems (ICORES-2012), pages 175-180
ISBN: 978-989-8425-97-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

and thousands of papers have been written on
several VRP variants. We refer to the survey by
(Cordeau et al. 2007) for a recent coverage of the
state-of-the-art on models and solution algorithms.
When demand of all customers exceeds the
vehicle capacity, two or more vehicles are needed.
This implies that in the Capacitated Vehicle Routing
Problem (CVRP) multiple Hamiltonian cycles have
to be found such that each Hamiltonian cycle is not
exceeding the vehicle capacity.
The Vehicle Routing Problem with Time
Windows (VRPTW) occurs when customers require
pick-up or delivery within pre-specified service
times. The VRPTW has been the subject of intensive
research efforts for both heuristic and exact
optimization approaches. An overview of the early
published papers is given by (Solomon, 1987).
The Heterogeneous Fleet Vehicle Routing
Problem (HF-VRP) drops the assumption that the
vehicle fleet has identical characteristics for each
vehicle. It should be clear that in some applications a
mix of vehicles with different capacities or
properties can be more useful than the use of a
single vehicle type. An interesting question
discussed in (Salhi & Rand, 1993) is what the
optimal composition of the vehicle fleet should be.
The Vehicle Routing Problem with Backhauls
(VRPB) considers that besides the deliveries to a set
of customers (linehaul customers), a second set of
customers requires a pick up (backhaul customers),
that is, all deliveries must be made on each route
before any pickups can be made. This arises from
the fact that the vehicles are rear-loaded.
This paper deals with the Vehicle Routing
Problem with Heterogeneous Fleet, Time Windows
and Backhauls (HF-VRPTW-B). This problem is
extremely frequent in the grocery industry, where
customer set is partitioned into two subsets (i)
supermarkets are the linehaul customers, each
requiring a given quantity of product to be delivered;
and (ii) grocery suppliers are the backhaul
customers, in which a given quantity of inbound
product must be picked up (Toth & Vigo, 2002).
The classical objective function in VRP is
minimizing the total distance travelled by all the
vehicles of the fleet or minimizing the overall travel
cost, usually a linear function of distance. Some
authors (Sniezek & Bodin, 2002) argue that only
considering total travel time or total travel distance
in the objective function is not enough in evaluating
VRP solutions, especially for non-homogeneous
fleets. Instead, they determine a Measure of
Goodness, which is a weighted linear combination
of many factors such as capital cost of a vehicle,
salary cost of the driver, overtime cost and mileage
cost. These costs are considered as internal or
economic costs for transportation companies.
Internalization of external cost of transport has
been an important issue for transport research and
policy development for many years in Europe and
worldwide. Some authors (Bickel et al. 2006) focus
their research on evaluating the external effects of
transport to internalize them through taxation. As a
result, decisions such as the selection of vehicle
types, the scheduling of deliveries, consolidation of
freight flows and selection of type of fuel,
considering internal and external costs can help to
reduce the environmental impact without losing
competitiveness in transport companies.
In recent years, some authors present integrated
routing with time windows and emission models for
freight vehicles (Maden et al. 2010; Bektas &
Laporte, 2011). They take into account the amount
of CO
2
emissions and fuel consumption, but they
don’t consider heterogeneous fleet and other
externalities such as atmospheric pollutants, noise or
accidents.
3 EXTERNALITY EVALUATION
In the last decade interest in environment
preservation is increasing and environmental aspects
play an important role in strategic and operational
policies. Therefore, environmental targets are to be
added to economical targets, to find the right balance
between these two dimensions (Dyckhoff et al.
2004).
In this paper, we focus our attention on external
costs associated with: greenhouse emissions,
atmospheric pollutant emissions, noise emissions
and accidents. These four components reflect 88%
of the total average external cost freight in the
European Union, excluding congestion costs
(INFRAS/IWW, 2004). The evaluation of each
component of the external costs applied to the
Spanish transport setting is based on the European
study (INFRAS et al, 2008).
Climate change or global warming impacts of
transport are mainly caused by emissions of the
greenhouse gases: carbon dioxide (CO
2
), nitrous
oxide (N
2
O) and methane (CH
4
). The main cost
drivers for marginal climate cost of transport are the
fuel consumption and carbon content of the fuel. The
recommended value for the external costs of climate
change for year 2010, expressed as a central estimate
is 25€/ton.CO
2
. The total well-to-wheel CO
2
emissions per unit of fuel, also called emission
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
176

factor, is estimated in 2.67 kg of CO
2
per litre of
diesel.
Air pollution costs are caused by the emission of
air pollutants such as particulate matter (PM), NO
x
and non-methane volatile organic compounds
(NMVOC). For internalization purposes the
estimated external costs of each pollutant emissions
can be obtained by multiplying the grams of the
pollutant per kilometer travelled with the external
costs per gram of pollutant emitted. The
recommended air pollution costs for each pollutant
in Spain (emissions 2010, in €2000/ton of pollutant)
are: NO
x
=2600; NMVOC=400; PM
2.5
=41200;
PM
10
=16500, using PM in outside built-up areas.
The ratio €2010/€2000 is fixed to 1.323. The
estimation of pollutant emissions from road
transport are based on the Tier 2 methodology
(EMEP/EEA, 2010). This approach considers the
fuel used for different vehicle categories and
technologies.
Noise costs consist of costs for annoyance and
health. The recommended noise costs for Heavy-
Duty Vehicles are in a range from 0.25 to 32 (in
€2000/ton-km), with a mean value of 4.9.
External accident costs are those social costs of
traffic accidents which are not covered by risk
oriented insurance premiums. The recommended
accident costs for Heavy-Duty Vehicles are in a
range from 0.7 to 11.8 (in €2000/ton-km), with a
mean value of 4.75.
In this paper, the routes design will employ all of
these average costs and emission factors,
multiplying these parameters by the respective
distance travelled, load carried or fuel consumed in
each route.
4 PROBLEM MODELING
The HF-VRPTW-B is defined on a graph G={N,A}
with N={0,1,…,t,t+1,…,n} as a set of nodes, where
node 0 represents the depot, nodes numbered 1 to t
represent delivery points and nodes numbered t+1 to
n represent supply points (backhauls), and A is a set
of arcs defined between each pair of nodes. A set of
m heterogeneous vehicles is available to deliver the
desired demand of all customers from the depot
node and then to pick-up the inbound products from
the supply and return to the depot node. The
constructing routes of each vehicle must meet the
following constraints: no vehicle carries load more
than its capacity, each customer and supplier is
visited within its respective time window, customers
are not visited after any suppliers and no vehicle
exceeds the maximum allowable driving time per
day.
We adopt the following notation:
• D
i
load demanded by node i
∈
{1,…,t} and
load supplied by node i
∈
{t+1,…,n}
• q
k
capacity of vehicle k
∈
{1,…,m}
• [e
i
,l
i
] earliest and latest time to begin the
service at node i
• s
i
k
service time in node i by vehicle k
• d
ij
distance from node i to node j (i
≠
j)
• t
ij
driving time between the nodes i and j
• T
k
maximum allowable driving time for
vehicle k
Our formulation of the problem uses de
following decision variables:
• x
ij
k
binary variable, equal to 1 if the vehicle
k
∈
{1,…,m} travels from nodes i to j (i
≠
j)
• y
i
k
starting service time at node i
∈
{0,1,…,n}; y
0
k
is the ending time
• f
ij
k
load carried by the vehicle k
∈
{1,…,m}
from nodes i to j (i
≠
j)
Constraints of the model are as follows:
),...,1(1
1
0
mkx
n
j
k
j
=≤
∑
=
(1)
),...,1;,...,1(0
00
nimkxx
n
ij
j
k
ji
n
ij
j
k
ij
===−
∑∑
≠
=
≠
=
(2)
),...,1(1
10
nix
m
k
n
ij
j
k
ij
==
∑∑
=
≠
=
(3)
),...,1(
10
mkqxD
t
i
k
n
ij
j
k
iji
=≤
∑∑
=
≠
=
(4)
),...,1(
10
mkqxD
n
ti
k
n
ij
j
k
iji
=≤
∑∑
+=
≠
=
(5)
∑∑∑
=+==
=
m
k
n
ti
t
j
k
ij
x
111
0
(6)
∑∑
=+=
=
m
k
n
tj
k
j
x
11
0
0
(7)
),...,1;;,...,0
;,...,1()1(
mkijnj
nixTytsy
k
ij
kk
jij
k
i
k
i
=≠=
=−+≤++
(8)
),...,1;,...,1()1(
00
mknjxTyt
k
j
kk
jj
==−+≤
(9)
),...,1;,...,1( mknilye
i
k
ii
==≤≤
(10)
),...,1(
0
mkTy
kk
=≤
(11)
),...,1(
1010
tiDff
m
k
i
n
ij
j
k
ij
m
k
n
ij
j
k
ji
==−
∑∑∑∑
=
≠
==
≠
=
(12)
),...,1(
1010
ntiDff
m
k
i
n
ij
j
k
ji
m
k
n
ij
j
k
ij
+==−
∑∑∑∑
=
≠
==
≠
=
(13)
EVALUATING VEHICLE ROUTING PROBLEMS WITH SUSTAINABILITY COSTS
177

),...,1;
;,...,0;,...,0()(
mkij
njtixDqf
k
iji
kk
ij
=≠
==−≤
(14)
),...,1
;;,...,0;,...,1(
mk
jinitjfxD
k
ij
k
ijj
=
≠==≤
(15)
),...,1
;;,...,0;,...,1(
mk
ijnjntifxD
k
ij
k
iji
=
≠=+=≤
(16)
),...,1;
;,...,0;,...,1()(
mkji
nintjxDqf
k
ijj
kk
ij
=≠
=+=−≤
(17)
Constraints (1) mean that no more than m
vehicles (fleet size) depart from the depot.
Constraints (2) are the flow conservation on each
node. Constraints (3) guarantee that each customer
and supplier is visited exactly once. Constraints (4)
and (5) ensure that no vehicle can be overloaded.
Constraint (6) guarantees that customers are not
visited after any suppliers (backhauls), while
constraint (7) avoids empty running on the way out.
Starting service times are calculated in constraints
(8) and (9). These constraints also avoid subtours.
Time windows are imposed by constraints (10).
Constraints (11) avoid exceeding the maximum
allowable driving time. Balance of flow is described
through constraints (12) and (13). Constraints (14)-
(17) are used to restrict the total load a vehicle
carries.
The goal of the problem is to construct several
routes minimizing the sum of internal and external
costs. The internal costs (IC) associated with a given
route is composed of five major items: costs of
driver (DRC), energy costs (ENC), fixed cost of
vehicles–investment, inspection, insurance- (FXC),
maintenance costs (MNC) and toll costs (TLC). In
addition, the external costs (EC) and social effects of
transportation activities are considered. They are
composed of: climate change costs (CCC), air
pollution costs (APC), noise costs (NSC) and
accidents costs (ACC).
)()
(
ACCNSCAPCCCCTLC
MNCFXCENCDRCECICMinimize
++++
+
++
+
=+
(18)
The mathematical forms of the aforementioned
components shown in Equation (18) are presented
bellow.
k
m
k
k
ypDRC
0
1
∑
=
=
(19)
∑∑∑∑
=
≠
===
+=
n
i
n
ij
j
m
k
R
r
k
ij
kk
ij
k
ij
krr
ffeuxfedfcENC
0011
)(
δ
(20)
∑∑
==
=
n
i
m
k
k
i
k
xfxFXC
11
0
(21)
∑∑∑
=
≠
==
=
n
i
n
ij
j
m
k
k
ijij
k
xdmnMNC
001
(22)
∑∑∑
=
≠
==
=
n
i
n
ij
j
m
k
k
ijij
xtlTLC
001
(23)
)(
0011
,22 k
ij
kk
ij
k
n
i
n
ij
j
m
k
R
r
ij
rCOkrCO
ffeuxfedefpeCCC +=
∑∑∑∑
=
≠
===
δ
(24)
∑∑∑∑∑∑
=
≠
=====
=
n
i
n
ij
j
m
k
R
r
T
t
P
p
k
ijij
tpktkrp
xdefpeAPC
001111
,
γδ
(25)
∑∑∑
=
≠
==
=
n
i
n
ij
j
m
k
k
ijij
fdneNSC
001
(26)
∑∑∑
=
≠
==
=
n
i
n
ij
j
m
k
k
ijij
fdaeACC
001
(27)
The set of parameters used in the above
expressions are:
• p
k
: pay of driver k per unit time
• fc
r
: unit cost of fuel type r
• fe
k
: fuel consumption for the empty veh. k
• feu
k
: fuel consumption per unit of
additional load in vehicle k
• δ
kr
: equal to 1 if veh. k uses the fuel type r
• fx
k
: the fixed cost of vehicle k
• mn
k
: costs of preventive maintenance,
repairs and tires per kilometre of vehicle k
• tl
ij
: costs of tolls associated with arc (i,j)
• pe
CO2
: unit price per ton of CO
2
emitted
• ef
CO2,r
: emission factor, amount of CO
2
emitted per unit of fuel r consumed
• pe
p
: the unit price per ton of the pollutant p
emitted
• ef
p,t
: amount of pollutant p emitted from
tech. vehicle t per km travelled
• γ
kt
: equal to 1 if veh. k belongs to tech. t
• (ne; ae): costs of (noise emissions;
accidents) per ton of load carried and per
km travelled
5 ILLUSTRATIVE EXAMPLE
In this section, we use a four-node illustrative
example to show the differences between using three
objective functions: minimizing the total distance
travelled (1), minimizing the total internal costs (2)
and minimizing the total internal and external costs
(3). We also study the traditional CVRP with
Heterogeneous Fleet (a), versus the effect of adding
Backhaul (b), adding also maximum allowable
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
178
driving Time (c), and adding also Time Window (d).
We solve 12 instances.
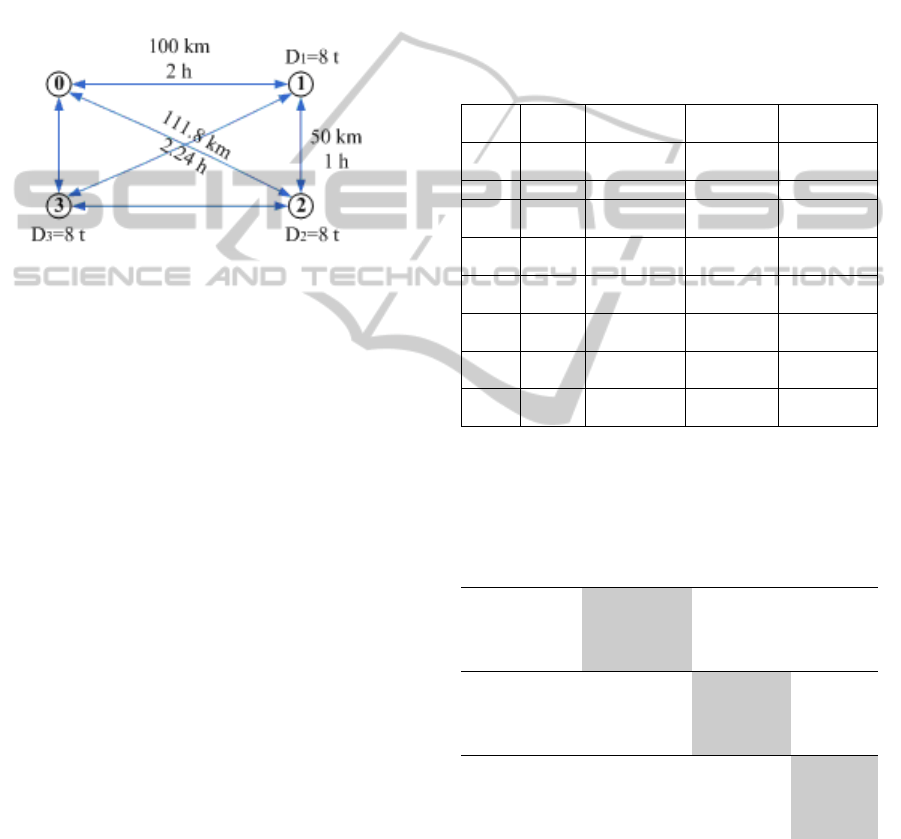
We consider the four node network of Figure 1,
with 3 different vehicles at node 0 to serve
customers 1, 2 and 3. We consider an average speed
of 50 km/h on each arc. Then the driving times t
ij
between nodes are 1, 2 and 2.24 hours, depending on
the length of the arc. We assume a homogeneous
load demanded by each node as D
i
=8 ton. Service
times are set to s
i
k
=1 hour in all nodes by all
vehicles, and there are no toll costs.
Figure 1: Four-node example.
Table 1 shows the parameters associated to each
vehicle of the fleet. Table 2 shows the parameters
associated to fuel unit costs, external unit costs and
emission factors of vehicle types used.
As mentioned above, 12 instances are modelled
using the MILP problem. In case (b) we consider a
backhaul in node 2 with a demand of D
2
=-8 ton. In
case (c) we also assume a maximum driving time for
each vehicle of 8 h. And finally in case (d) we also
set a time window in node 1 of [3h, 5h].
We have used CPLEX 11.1 with its default
settings to solve the 12 MILP instances. Eight
different solutions have been found (Table 3).
The solutions associated to each instance and the
objective functions are illustrated in Table 4.
Table 1: Fleet parameters.
Vehicles (k) 1 2 3
q
k
(tons) 9.5 18 9.5
p
k
(€/h) 19.89 21.40 19.89
Type of fuel (r) Diesel Diesel Diesel
fe
k
(l/100km) 17.50 19.80 17.50
feu
k
(l/ton·100km)
1.05 0.75 1.05
fx
k
(€/day) 42.65 54.60 42.65
mn
k
(€/km) 0.0590 0.0787 0.0590
Technology (t)
Rigid;
12-14_t;
Euro_IV
t=2
Rigid;
20-26_t;
Euro_IV
t=3
Rigid;
12-14_t;
Euro_II
t=1
Table 2: Unit costs.
fc
DIESEL
(2010€/l) 0.9009
pe
CO2
(2010€/ton) 25
ef
CO2,DIESEL
(kg/l) 2.67
Pollutant (p) NOx NMVOC PM
pe
p
(2010€/ton) 3439.8 529.2 76337.1
ef
p
,1
(gr/km) 5.50 0.207 0.1040
ef
p
,2
(gr/km) 2.65 0.008 0.0161
ef
p
,3
(gr/km) 3.83 0.010 0.0239
ne (2010€/ton-km) 0.00648
ae (2010€/ton-km) 0.00635
Table 3: Different optimal solutions.
Sol. Veh.
Optimal
Route
Load (ton)
Arrival
Time (h.)
#1
1
2
0-3-0
0-2-1-0
8-0
16-8-0
3
7.24
#2 2 0-3-1-2-0 16-8-0-8 9.48
#3
1
3
0-3-0
0-1-2-0
8-0
8-0-8
3
7.24
#4
1
2
0-1-0
0-3-2-0
8-0
8-0-8
6
7.24
#5
1
2
0-3-0
0-1-2-0
8-0
16-8-0
3
7.24
#6
1
3
0-1-2-0
0-3-0
8-0-8
8-0
7.24
3
#7
1
3
0-1-0
0-3-2-0
8-0
8-0-8
6
7.24
#8
1
3
0-3-2-0
0-1-0
8-0-8
8-0
7.24
6
Table 4: Solutions and values of the three objective
functions for all the instances.
Inst. Sol.
O.F. 1 Total
Distances
O. F. 2
Total
Internal
Costs
O. F. 2
Total
Costs
1a #1
361,8 † 419,5 463,9
1b #2 323,6 † 358,3 † 402,0 †
1c #3
361,8 † 387,2 † 428,1
1d #4
461,8 † 498,6 538,6
2a #5 361,8 †
418,2 † 460,0 †
2b #2 323,6 † 358,3 † 402,0 †
2c #6 361,8 †
387,2 † 425,2 †
2d #7 461,8 †
468,6 † 511,6
3a #5 361,8 † 418,2 †
460,0 †
3b #2 323,6 † 358,3 † 402,0 †
3c #6 361,8 † 387,2 †
425,2 †
3d #8 461,8 † 468,6 †
510,5 †
† Optimal solution with that Objective Function
6 ANALYSIS OF RESULTS
Some implications of the results presented in Table
4 are as follows.
EVALUATING VEHICLE ROUTING PROBLEMS WITH SUSTAINABILITY COSTS
179

Optimal solutions which consider the traditional
objective function of minimizing total distance
travelled (Sol#1 to Sol#4) are not optimal in some
cases when the objective function includes costs’
parameters. But optimal solutions which consider
internal and external costs in the objective function
(Sol#5, #2, #6 and #8) are also optimal minimizing
distances or internal costs. The reason is that
minimizing internal costs is quite similar to
minimizing distances.
When a heterogeneous fleet is considered,
adding external costs implies the selection of the less
pollutant vehicles or the assignment of longer routes
to those vehicles (Sol#7 vs. Sol#8), maintaining
minimum total internal costs.
Depending on the type of VRP, the analysis of
performance measures must be different. Solutions
including backhauls reduce all the costs (see Table
4, Inst.b vs. Inst.a). But adding time constraints
increase the costs (see Table 4, Inst.d or Ins.c vs.
Inst.b). Using the total costs allows comparing
different solutions and selecting the most
appropriate. For example, Sol#8 is better than Sol#7
for the external cost, and also Sol#7 is better than
Sol#4 for the internal and external costs.
7 CONCLUSIONS
In this paper, a new mixed-integer linear
programming model for the Vehicle Routing
Problem with some realistic assumptions
(Heterogeneous Fleet, Time Windows and
Backhauls) is presented with a broader objective
function that accounts not just for the internal costs,
but also for external costs. With this model,
transportation companies can select the most
appropriate vehicles, determine the routes and
schedules to satisfy the demands of the customers,
reduce externalities and achieve a more sustainable
balance between economic, environmental and
social objectives.
An illustrative example with four nodes and
three different vehicles has been presented. 12
instances of the 4-node example have been solved
using three objective function and four variants. 8
different optimal solutions have been obtained and
they have been compared. Solution with the lowest
values of the total costs is the dominant solution and
must be selected.
Further research leads to the application of the
model to realistic numbers of customers. In larger
instances the development of heuristic algorithms
such as tabu search methods are needed.
ACKNOWLEDGEMENTS
This research has been fully funded by the Spanish
Ministry of Science and FEDER through grants
DPI2008-04788 and by the Andalusia Government
through grants P10-TEP-6332.
REFERENCES
Bektas, T. & Laporte, G. 2011. The Pollution-Routing
Problem. Transportation Research Part B,
doi:10.1016/j.trb.2011.02.004.
Bickel, P., Friedrich, R., Link, H., Stewart, L. & Nash, C.
2006. Introducing environmental externalities into
transport pricing: measurement and implications.
Transport Reviews, 26(4): 389–415.
Cordeau, J.-F., Laporte, G., Savelsbergh, M. W. P. &
Vigo, D. 2007. Vehicle routing. In: Barnhart, C.,
Laporte, G. (Eds.), Transportation, Handbooks in
Operations Research and Management Science, vol.
14: 367-428. Elsevier, Amsterdam, The Netherlands.
Dyckhoff, H., Lackes, R. & Reese, J. 2004. Supply Chain
Management and Reverse Logistics. Springer.
EMEP/EEA. 2010. Emission inventory guidebook 2009,
updated June 2010. European Environment Agency.
INFRAS/IWW. 2004. External costs of transport: update
study, INFRAS, Zurich.
INFRAS, CE Delft, ISI & University of Gdansk. 2008.
Handbook on estimation of external cost in the
transport sector. Produced within the study:
Internalisation Measures and Policies for All external
Cost of Transport (IMPACT), Delft, CE.
Maden, W., Eglese, R. W. & Black, D. 2010. Vehicle
routing and scheduling with time varying data: a case
study. Journal of the Operational Research Society,
61(3), 515–522.
Salhi, S. & Rand, G. K. 1993. Incorporating vehicle
routing into the vehicle fleet composition problem.
European Journal of Operational Research,
66:313_330.
Sniezek, J. & Bodin L. 2002. Cost Models for Vehicle
Routing Problems. Proceedings of the 35th Hawaii
International Conference on System Sciences, 1403-
1414.
Solomon, M. M. 1987. Algorithms for the vehicle routing
and scheduling problems with time window
constraints. Operations Research, 35(2):254_265.
Toth, P. & Vigo, D. 2002. The vehicle routing problem.
SIAM Monographs on Discrete Mathematics and
Applications, SIAM, 195–224.
ICORES 2012 - 1st International Conference on Operations Research and Enterprise Systems
180
