
VEHICLE CLASSIFICATION USING EVOLUTIONARY FORESTS
Murray Evans, Jonathan N. Boyle and James Ferryman
Computational Vision Group, School of Systems Engineering, University of Reading, Reading RG6 6AY, U.K.
Keywords:
Vehicle classification, Evolutionary forests.
Abstract:
Forests of decision trees are a popular tool for classification applications. This paper presents an approach to
evolving the forest classifier, reducing the time spent designing the optimal tree depth and forest size. This
is applied to the task of vehicle classification for purposes of verification against databases at security check-
points, or accumulation of road usage statistics. The evolutionary approach to building the forest classifier is
shown to out-perform a more typically grown forest and a baseline neural-network classifier for the vehicle
classification task.
1 INTRODUCTION
Vehicle classification is a potentially very useful tool.
In the context of border security checkpoints, auto-
matic classification of vehicles could be used in con-
junction with automatic number-plate recognition to
provide verification that the type of car registered
against the plate number matches the car observed at
the checkpoint. Mismatches can indicate stolen or un-
licenced vehicles which should be more thoroughly
checked. Alternatively, a camera observing a road
or gate could be used to determine statistics of ve-
hicle types that pass through, providing information
that can be of use in future road planning activities.
At a border checkpoint, passenger vehicles
(busses, cars) and light goods vehicles (vans) are often
split from heavy goods vehicles. This paper presents
the results of research developing a classifier capa-
ble of distinguishing between different sub-classes of
passenger vehicles: hatchbacks, saloons, estate cars,
sports-utility vehicles, sports-cars etc. At this level,
the information provided can be useful for verifica-
tion against the registered details of a vehicle. For
instance, vehicle registration information will often
store details of the make and model of a car against
its registration details. In the UK, a Ford Focus can
be either an estate or a hatchback, so an SUV trav-
elling with registration plates befitting a Ford Focus
could indicate foul play, and should arouse suspicion.
Although previously published works have consid-
ered multiple vehicle classes, few have considered the
task of vehicle classification beyond the car/bus/truck
level.
To achieve the classification, it was decided to ex-
plore the potential of forest classifiers. Forests are
ensembles of decision trees, and have seen much in-
terest in the vision community after the publication
of (Lepetit and Fua, 2006). Of particular interest have
been the so called randomised forests. Forest classi-
fiers are appealing in part because of their simplicity,
but equally from their fast run-time performance, in-
herent ability to deal with multiple classes, and the
simplicity with which wildly different primitive clas-
sifiers can form the building blocks of the forest.
This paper proposes constructing the forest clas-
sifier using an evolutionary approach, resulting in a
classifier that is generally smaller and of superior per-
formance to a forest grown in the original manner.
The remainder of this paper is structured as fol-
lows: Section 2 will discuss previous works on vehi-
cle classification. Section 3 will then detail the data
set created for the experiments. The developed classi-
fier will be introduced in Section 4 and then evaluated
in Section 5, before Section 6 concludes and consid-
ers future work.
2 RELATED WORK
Previous research into the area of vehicle classifica-
tion has shown some success. Classification is per-
formed in (Gupte et al., 2002) to split vehicles in a
highway scene into Truck and non-truck classes by
estimating the size of the vehicle using calibration in-
formation, an approach similarly taken by (Shi et al.,
2007). The calibration requirement is avoided in (Av-
387
Evans M., N. Boyle J. and Ferryman J. (2012).
VEHICLE CLASSIFICATION USING EVOLUTIONARY FORESTS.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 387-393
DOI: 10.5220/0003763603870393
Copyright
c
SciTePress

ery et al., 2004) by determining the length of motion
blobs and determining the statistics for the current
view to split into long and short vehicles. The cal-
ibration step is also avoided by (Hsieh et al., 2006),
which automatically determines the lanes of the road
and normalises the size of the detected vehicles by
the width of the lane at the part of the image. Vehi-
cles are classified based on their size and a feature
termed “linearity” into cars, mini-vans, trucks and
“van-trucks”. (Huang and Liao, 2004) also make use
of vehicle size from a side profile view of a highway,
but also incorporate further measurements of the as-
pect ratio and compact ratio of the motion silhouettes
to get a finer grained classification considering seven
classes.
Earlier work using a model fitting approach can
be seen in (Sullivan et al., 1996) which showed
promising results classifying cars versus vans, again
in a highway scenario. A related approach was
later taken by (Buch et al., 2008) using the possi-
ble classifications: Bus/Lorry, Van, Car/Taxi, Motor-
bike/bicycle. The advantage of such model based ap-
proaches should be a reduction in view-point depen-
dence, though building the models could be expensive
and prone to error.
Other approaches include the use of Gabor filters
and a minimum-distance classifier (Ji et al., 2007),
using normalised side-profile images of the vehicles.
(Zhang et al., 2006) perform the classification using
“Eigen-vehicles” (a reference to Eigenfaces), along
with PCA and a support vector machine. (Zhang
et al., 2008) use a transformation-ring-projection with
wavelet fractal signatures to describe side-profile ve-
hicle segmentations for classification. Classification
and tracking are considered together in (Morris and
Trivedi, 2006), and (Negri et al., 2006) use frontal
views to go as far as classifying individual models of
cars.
3 DATA PREPARATION
In common UK parlance, cars can be grouped into
one of the following types: hatchbacks, saloons, es-
tates, off-roaders or Sports Utility Vehicles (SUVs),
sports-cars, convertibles and people-carriers. Add to
this, there are vans, busses, trucks, pickups and lor-
ries. To collect a suitable data-set, a camera was
erected at one of the main entrance/exit gates at the
University of Reading, looking perpendicular across
the entrance road. This recorded the morning rush-
hour, accumulating a total of approximately four
hours of footage. The orientation of the camera was
chosen to capture as close to a side-profile of the pass-
ing cars as was possible, as the side-profile was con-
sidered to be the most discriminating between the dif-
ferent classes of vehicles.
A motion detector (Zivkovic, 2004) was used to
detect frames in the video where the quantity of mo-
tion in a pre-defined section towards the centre of
the image passed a threshold, indicating the presence
of a vehicle. A wheel detector was used to deter-
mine the location of the wheels of the vehicle, and
then scaling and cropping was applied to both the
RGB and motion-mask images, such that the wheels
occupied a pre-defined location in the resulting nor-
malised images. The normalised images were sized at
200 ×85 pixels, with the front and back wheels cen-
tred at (50, 80) and (150, 80) respectively. The result-
ing images were then manually parsed to determine
their correct classification, and to verify robust nor-
malisation.
Examples of the normalised images for several of
the observed vehicle classes are shown in Figure 1,
along with example motions masks in Figure 2. The
resulting image database contained example images
in the classes and quantities listed in Table 1. It is
quite clear that a strong bias exists for vehicles fitting
into the hatchback category.
Figure 1: Examples of the normalised vehicle images. From
top to bottom the images depict samples from the classes:
hatchback, estate, saloon, people-carrier, SUV and van.
4 FOREST CLASSIFIER
To classify the vehicle images, an “evolutionary for-
est” classifier has been developed. This fuses the
traditional forest classifier (an ensemble of decision
trees) (Breiman, 2001), with techniques from genetic
algorithms to evolve a forest optimised for the classi-
fication task.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
388
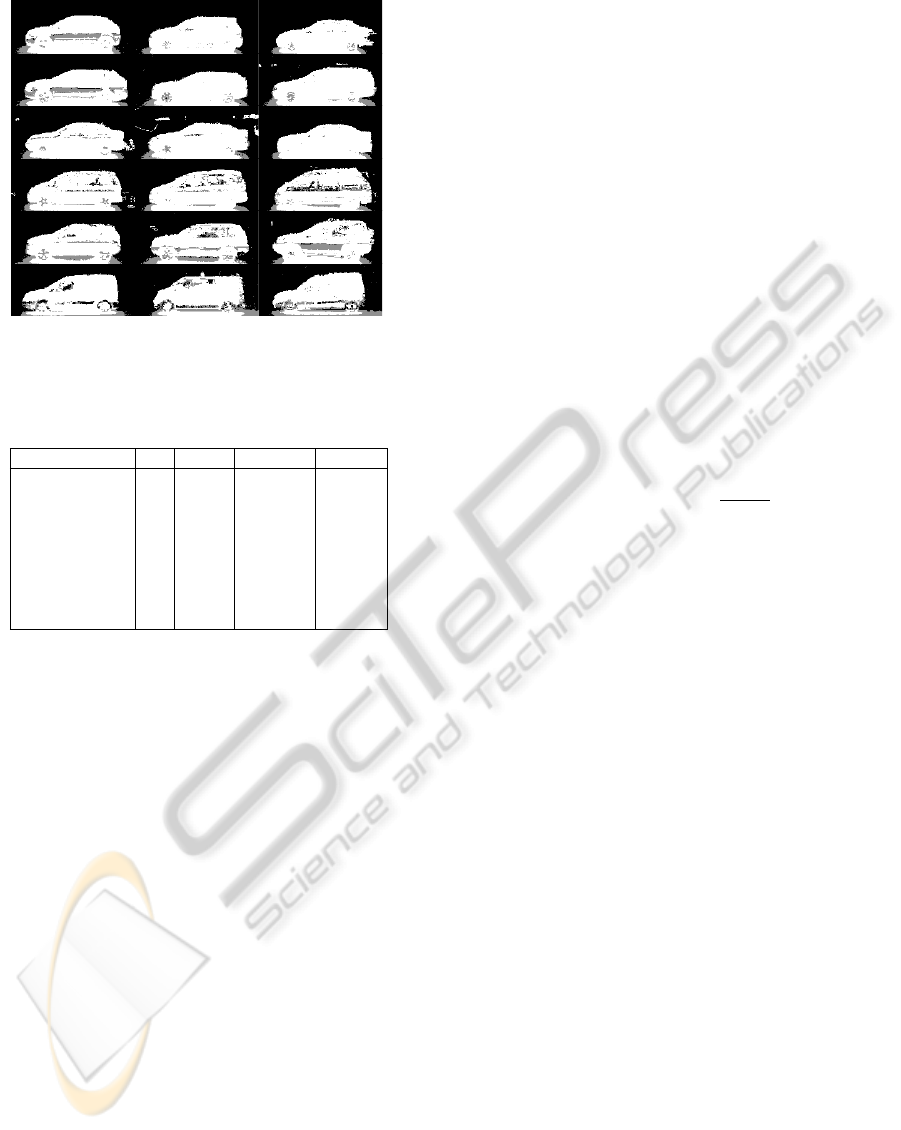
Figure 2: Examples of the normalised mask images accom-
panying the normalised RGB images depicted in Figure 1.
Table 1: Classes and number of example images acquired,
as well as example training/testing splits.
class id total training testing
hatchback 1 7027 351 6676
estate 2 1163 58 1105
saloon 3 1640 82 1558
convertible 4 342 50 292
sports-car 5 173 50 123
people-carrier 6 680 50 630
SUV 7 543 50 493
van 8 1246 62 1184
Recently, randomised decision forests have been
of great interest. These grow a set of decision trees
where each decision node of the tree is configured
to exploit a randomly chosen classifier from a set of
available classifiers, often with randomly initialised
parameters that are optimised to produce the best split
of the training examples. Typically, only binary deci-
sion trees are used, where each node has two children.
These randomised decision forests can be effective in
many scenarios, perhaps most famously in the Mi-
crosoft Kinect player tracking system (Shotton et al.,
2011), however it can be unclear as to how large the
forest should be, and how deep each tree should be
permitted to become. Furthermore, while each tree is
optimised to be the best classifier it can be, the trees
are not optimised to work together to produce the best
forest that can be produced.
This work considers an evolutionary approach to
growing the forest ensuring that every tree that is a
part of the forest is there to optimise the forest’s over-
all performance.
4.1 Decision Tree Nodes
Each decision tree in the forest is a binary tree where
each node is a primitive binary classifier. Given an
input, each node can either send the input to its left
or right child. For the purposes of the vehicle classi-
fication task four very simple low-level image based
classifiers have been implemented.
4.1.1 Pixel Difference Node
This first node has five parameters, namely the (x, y)
image coordinates of two pixels in the image, and a
threshold value t
c
. The colour p
1
and p
2
of each pixel
is extracted and represented in CIELAB space, then
the Euclidean difference is computed between the two
colours, and compared to a threshold. If the result is
larger than the threshold, the second child is activated,
otherwise, the first child is activated. If c represents
the child, then the node’s function can be represented
by the equation:
c =
1 if t
c
<
√
p
1
·p
2
0 otherwise
(1)
4.1.2 Edge Orientation Node
The input image I can be transformed to the two chan-
nel image E representing the magnitude and orienta-
tion of gradients in the image. A decision node can
be created that checks if, for a given pixel (x, y), the
magnitude is above a threshold t
m
and the orientation
is between the values t
om
→t
oM
. This node therefore
has five parameters (the pixel co-ordinates and three
thresholds). Let m and o be the gradient magnitude
and orientation at (x, y), then the appropriate child is
selected from:
c =
1 if (m > t
m
) ∧(t
om
< o < t
oM
)
0 otherwise
(2)
4.1.3 Chamfer Node
The edge magnitude image can be thresholded to pro-
duce a binary edge image. This in turn can be used to
produce a distance transform image, or chamfer im-
age C where every pixel is valued by its distance from
the nearest edgel. A very simple node can then be
created that, given two pixels as input, selects the ap-
propriate child based on whether the first or second
pixel has a larger value in C.
c =
1 if C(x
0
, y
0
) > C(x
1
, y
1
)
0 otherwise
(3)
VEHICLE CLASSIFICATION USING EVOLUTIONARY FORESTS
389
4.1.4 Mask Node
The final node takes in the binary motion mask M that
was created at the same time as the RGB image I. For
a given pixel, this node selects a child based only on
whether the pixel is active in the mask image, or not.
c =
1 if M(x, y) > 0
0 otherwise
(4)
4.2 The Evolutionary Forest
To create a randomised forest, each tree is grown one
by one. First, a classifier is selected at random for
the root node, and the parameters which create the
optimal split of the input data determined (see sec-
tion 4.2.2). The split data are then sent to the child
nodes, and so on, until a maximum tree depth is
achieved, or a split of the data contains only one class
type.
When an unseen testing example is presented to
the forest, it will pass through each tree and reach a
leaf node, providing information on what the likely
class of the unknown image is. For instance, if the
leaf node recorded 200 instances of a hatchback, and
only one instance of SUV, the probability would be
that the unknown image also represents a hatchback.
The vector of class counts for all leaf nodes can be
accumulated to determine a belief as to the most ap-
propriate class for the input image.
In this approach, each tree is an independently op-
timised classifier, and the forest result a majority be-
lief. There exists some prior work in using evolution-
ary approaches to create decision trees (Papagelis and
Kalles, 2001), however in this work the aim is not to
produce a population of independently optimal deci-
sion trees, but rather to evolve a set of trees that work
together in an optimal forest.
4.2.1 Constructing the Evolutionary Forest
To begin creating the forest, the first decision tree
must be created. An initial set of short decision trees
is grown. This will form the population from which
the first tree of the final forest classifier is evolved.
Each of the initial trees is grown using a subset of the
whole set of training images T . The trees are then
evaluated against their ability to classify the whole of
T . The worst w% of trees are then exposed to replace-
ment by one of the following genetic operators:
1. Cross-over: The poor performing tree t
d
is re-
moved from the set of trees, and replaced by a
new tree that is the product of a cross-over “breed-
ing” of two trees with better performance. This
involves selecting a random node on each of the
better trees, and swapping them, children and all.
This results in two trees, the shorter of which is
selected as the replacement tree.
2. Regeneration: The poor performing tree t
d
is re-
moved from the set of trees and replaced by a
completely new tree.
3. Mutation: A node is selected in the poorly per-
forming tree t
d
. The node is replaced by a differ-
ent node with randomly selected parameters.
After a number of iterations (this can be a fixed
number, or a number based on the current best per-
formance of the population), the genetic process is
stopped. The best performing tree is taken from the
set of trees, and becomes the first tree of the final for-
est classifier.
Now, the process repeats, adding trees one at a
time to the final forest, However, after the first op-
timisation, the definition of the “best” tree is slightly
altered. No longer is it desirable to produce an opti-
mal, stand-alone decision tree. Rather, what is sought
is the tree that best augments the current final forest.
The evaluation criteria and the algorithm to optimise
the individual trees will now be discussed in the re-
maining parts of this section. The training algorithm
is summarised in Figure 3.
Let T be the set of training images
Create an empty forest F
0
while no. of trees < maximum:
Create V , a random subset of T
Create a set of decision trees, F
i
for c = 0 to max no. iterations:
Train the trees in F
i
Evaluate the trees in F
i
Replace the worst w% of trees in F
i
Add the best tree in F
i
to F
0
Perform a final training of F
0
Figure 3: Pseudocode of evolutionary forest algorithm.
4.2.2 Optimising Tree Nodes
When growing the initial trees, it is useful to opti-
mise the parameters of a node to produce the “best”
possible split of the data. This is achieved by using
a greedy search of the parameters to maximise the in-
formation gain between the input data to the node, and
the two output sub-sets, identical to the approach used
in (Shotton et al., 2011).
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
390

4.2.3 Evaluating Tree Performance
On the initial iteration that produces the first tree for
the final forest, the evaluation function for the trees
is set such that the evolutionary process is attempt-
ing to produce the best possible stand-alone decision
tree. This performance is captured by the following
equation:
φ( f
i
) = 0.3¯z + 0.7 min
j
Z(i, j) (5)
Here, Z(i, j) is the number of images that the tree
f
i
correctly classified of class h
j
, normalised by the
number of examples of class h
j
that were shown to
the tree. Meanwhile, ¯z is used to indicate the median
of Z(i, j) over the possible classes h
j
. This equation
is structured to favour a tree that performs reasonably
well across all of the possible classes, rather than a
tree that excels at any one class but is wholly wrong
on some others, and the parameters 0.3 and 0.7 bal-
ance the equation to encourage a jack-of-all trades
classifier which has generally provided the best start-
ing point for the evolutionary process.
Once the first tree has been selected, the optimi-
sation function used to design subsequent trees alters.
Rather than trying to make a tree that is an optimal
classifier of the data, the aim is to produce a tree that
best augments the existing forest. This is a more sub-
tle equation to produce.
Let F
0
be the final forest that the algorithm is try-
ing to produce, and F
i
be the population of trees that
are being optimised to produce the i’th tree for F
0
(meaning that F
0
contains i −1 trees).
For any given image I with known class h, F
0
can
be used to produce a classification h
0
. In doing so, it
will also produce the belief vector h
0
, which is the ac-
cumulated beliefs of all the i −1 leaf nodes reached
during the classification process. In an ideal classi-
fier, all but the belief in the correct class will be 0.
More realistically, the desire will be that the belief in
the correct class is larger than the belief in each of
the other classes. The larger this difference, the more
confident the classification.
As such, for a given image, it is possible to calcu-
late h
0
as the belief of the forest F
0
, as well as h
i
as
the belief of the forest F
0
i
, which is the forest F
0
aug-
mented by a tree in F
i
. The effectiveness of the tree
to improve or complement the performance of F
0
can
then be written as:
σ( f
n
∈ F
i
) =
∑
I
(c
i
−m
i
)) −(c
0
−m
0
))
(6)
where c
i
and c
0
are the values of h
i
and h
0
for the
correct classification of the image I, while m
i
and m
0
is
the largest values in h
i
and h
0
. If the forest is correct,
the term c −m will be positive, and the more confi-
dent the classification, the larger the positive value. If
the augmented forest performs better then σ( f
n
) will
be positive, and the better it performs, the more pos-
itive it becomes. In this way, F
i
is breeding trees de-
signed to improve the performance of the final forest
F
0
, rather than trees that operate as expert independent
classifiers.
5 RESULTS
To evaluate the performance of the classifier, the im-
age dataset was randomly split such that for each
class h
j
with n
j
training examples there were at least
max(50, 0.05 ×n
j
) images removed from the training
set to the testing set. Table 1 shows an example split
of the data, and also gives each class an identifying
number corresponding to the numbers in the confu-
sion matrices in Table 2.
The classification performance of the genetically
optimised classifier is compared to a traditionally
grown randomised forest, as well as “baseline” results
from a multi-layer perceptron neural network. The
classification results of each classifier are displayed
as confusion matrices. Given the set of images for a
specific class (e.g. hatchback, row 1), the columns
specify the percentage of images classified, or mis-
classified, as each of the possible classifications. A
perfect classifier will produce 100% along the diago-
nal, and 0% everywhere else. The confusion matrices
in Table 2 show average values over twenty different
training/testing splits.
The genetic forests typically reach maximum per-
formance against the testing set by about 30 to 45
trees, as such, all were grown to a size of 50 trees. In-
dividual trees in the forests reached a maximum depth
of 16 levels, however, the median depth for any one
tree is only 4.
The randomised forests were each grown to a
maximum depth of 11 nodes, with again 50 trees per
forest, a size empirically suggested as near-optimal
for the classification task in hand. Note that this is a
far larger forest (due to the increased depth) than the
evolved forest.
For comparison with other traditional classifica-
tion approaches, a multi-layer perceptron was also
trained on the data, using gradient images as the in-
put. The results of this approach are the weakest of
the tested methods, showing that the forest, and evo-
lutionary forest, are an excellent choice for this clas-
sification task.
VEHICLE CLASSIFICATION USING EVOLUTIONARY FORESTS
391

Table 2: Classification results for (from top to bottom), the
evolutionary forest, randomised forest, and neural network.
0 1 2 3 4 5 6 7
1 97.2 0.4 0.6 0.0 0.5 0.8 0.1 0.4
2 5.1 81.6 7.2 0.6 0.4 4.1 0.6 0.4
3 0.5 2.7 90.1 2.5 4.1 0.0 0.0 0.1
4 8.7 1.1 10.7 76.2 3.2 0.0 0.2 0.0
5 2.7 0.0 6.6 1.3 89.3 0.0 0.0 0.0
6 13.5 3.7 0.0 0.0 0.0 75.7 6.6 0.5
7 4.2 2.5 0.1 0.6 0.0 5.5 85.3 1.8
8 2.5 0.7 0.0 0.0 0.0 2.6 1.9 92.4
0 1 2 3 4 5 6 7
1 95.6 0.4 0.2 0.1 0.8 2.8 0.0 0.1
2 6.5 63.8 12.3 1.6 0.8 13.2 1.8 0.1
3 0.9 3.1 86.9 5.0 3.8 0.1 0.1 0.0
4 15.8 0.6 18.1 63.2 2.2 0.1 0.1 0.0
5 6.7 0.0 15.0 2.9 75.5 0.0 0.0 0.0
6 18.3 0.9 0.0 0.0 0.0 71.0 9.7 0.0
7 6.9 1.4 0.1 0.8 0.0 18.5 71.9 0.4
8 5.0 0.6 0.0 0.0 0.0 9.0 4.6 80.6
0 1 2 3 4 5 6 7
1 92.9 1.6 2.1 0.2 2.3 0.4 0.4 0.1
2 18.3 58.5 6.4 11.1 1.0 3.8 0.3 0.8
3 10.3 2.2 77.0 6.9 1.2 0.3 1.8 0.4
4 11.4 3.1 20.6 56.7 2.7 0.5 2.5 2.4
5 16.1 0.2 4.2 0.1 72.7 1.2 4.6 0.9
6 10.0 13.4 0.7 1.2 9.8 54.9 3.0 7.0
7 3.5 1.0 5.3 2.5 4.4 2.5 69.9 11.0
8 0.8 1.7 0.9 3.9 2.0 5.3 6.5 79.0
6 CONCLUSIONS AND FUTURE
WORK
This paper has considered the application of forest
classifiers to the task of vehicle classification, propos-
ing in the process a method of growing the forest by
use of an evolutionary approach. Compared to the
typical randomised forest, the genetic forest showed
superior performance, and also performed better than
a baseline neural network.
Future work will aim to extend the current imple-
mentation to classify vehicles into make and model
categories, alternative image features to exploit at
each low-level classifier node, as well as determin-
ing the efficacy of the evolutionary forest approach in
other contexts.
ACKNOWLEDGEMENTS
This work was partially funded by the EU FP7 project
EFFISEC with grant No. 217991.
1
1
However, this paper does not necessarily represent the
opinion of the European Community, and the European
REFERENCES
Avery, R., Wang, Y., and Scott Rutherford, G. (2004).
Length-based vehicle classification using images from
uncalibrated video cameras. In Intelligent Transporta-
tion Systems, 2004. Proceedings. The 7th Interna-
tional IEEE Conference on, pages 737 – 742.
Breiman, L. (2001). Random forests. Machine Learning,
45:5–32. 10.1023/A:1010933404324.
Buch, N., Orwell, J., and Velastin, S. (2008). Detection and
classification of vehicles for urban traffic scenes. In
Visual Information Engineering, 2008. VIE 2008. 5th
International Conference on, pages 182 –187.
Gupte, S., Masoud, O., Martin, R., and Papanikolopoulos,
N. (2002). Detection and classification of vehicles. In-
telligent Transportation Systems, IEEE Transactions
on, 3(1):37 –47.
Hsieh, J.-W., Yu, S.-H., Chen, Y.-S., and Hu, W.-F.
(2006). Automatic traffic surveillance system for vehi-
cle tracking and classification. Intelligent Transporta-
tion Systems, IEEE Transactions on, pages 175 – 187.
Huang, C.-L. and Liao, W.-C. (2004). A vision-based ve-
hicle identification system. In Pattern Recognition,
2004. ICPR 2004. Proceedings of the 17th Interna-
tional Conference on, volume 4, pages 364 – 367
Vol.4.
Ji, P., Jin, L., and Li, X. (2007). Vision-based vehicle
type classification using partial gabor filter bank. In
Automation and Logistics, 2007 IEEE International
Conference on, pages 1037 –1040.
Lepetit, V. and Fua, P. (2006). Keypoint recognition using
randomized trees. Transactions on Pattern Analysis
and Machine Intelligence, 28(9):1465–1479.
Morris, B. and Trivedi, M. (2006). Improved vehicle clas-
sification in long traffic video by cooperating tracker
and classifier modules. In IEEE International Con-
ference on Advanced Video and Signal based Surveil-
lance.
Negri, P., Clady, X., Milgram, M., and Poulenard, R.
(2006). An oriented-contour point based voting algo-
rithm for vehicle type classification. In Pattern Recog-
nition, 2006. ICPR 2006. 18th International Confer-
ence on, pages 574 –577.
Papagelis, A. and Kalles, D. (2001). Breeding decision trees
using genetic algorithms. In International Conference
on Machine Learning, Proceedings of.
Shi, S., Qin, Z., and Xu, J. (2007). Robust algo-
rithm of vehicle classification. In Software Engineer-
ing, Artificial Intelligence, Networking, and Paral-
lel/Distributed Computing, 2007. SNPD 2007. Eighth
ACIS International Conference on, pages 269 –272.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-time human pose recognition in parts from a sin-
gle depth image. In Computer Vision and Pattern
Recognition, IEEE Conference on.
Community is not responsible for any use which may be
made of its contents.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
392

Sullivan, G. D., Baker, K. D., Worrall, A. D., Attwood,
C. I., and Remagnino, P. R. (1996). Model-based ve-
hicle detection and classification using orthographic
approximations. In 7th British Machine Vision Con-
ference.
Zhang, C., Chen, X., and bang Chen, W. (2006). A pca-
based vehicle classification framework. In Data En-
gineering Workshops, 2006. Proceedings. 22nd Inter-
national Conference on, page 17.
Zhang, D., Qu, S., and Liu, Z. (2008). Robust classifica-
tion of vehicle based on fusion of tsrp and wavelet
fractal signature. In Networking, Sensing and Con-
trol, 2008. ICNSC 2008. IEEE International Confer-
ence on, pages 1788 –1793.
Zivkovic, Z. (2004). Improved adaptive gaussian mixture
model for background subtraction. In Pattern Recog-
nition, 2004. 17th International Conference on, pages
28–31.
VEHICLE CLASSIFICATION USING EVOLUTIONARY FORESTS
393
