
NONLINEAR MAPPING BY CONSTRAINED CO-CLUSTERING
Rodolphe Priam
1
, Mohamed Nadif
2
and G´erard Govaert
3
1
S3RI, University of Southampton, University Road, SO17 1BJ, Southampton, U.K.
2
LIPADE, Universit´e Paris Descartes, 45 rue des Saints P`eres, 75006 Paris, France
3
HEUDIASYC, Universit´e de Technologie de Compi`egne, 60205 Compi`egne, France
Keywords:
Generative topographic mapping, Latent block model, Contingency table, Clustering.
Abstract:
The latent block model is an efficient alternative to the mixture model for modelling a dataset when the number
of rows or columns of the data matrix studied is large. For analyzing and reducing the spaces of a matrix, the
methods proposed in the litterature are most of the time with their foundation in a non-parametric or a mixture
model approach. We present an embedding of the projection of co-occurrence tables in the Poisson latent
block mixture model. Our approach leads to an efficient way to cluster and reduce this kind of data matrices.
1 INTRODUCTION
Contingency tables, or co-occurrence matrices, are
found in diverse domains. In these matrices each cell
is a cross-product of two categorical variables I (n cat-
egories) and J (d categories.) The cells contain the
number of occurrences for the corresponding cross-
categories. Contingency tables appear in information
retrieval (Deerwester et al., 1990) and document clus-
tering (Hofmann, 1999), where I may correspond to
a corpus of documents, J to a set of words, and so
the frequency denotes the number of occurrences of
a word in a document. Other examples from data
mining, preference analysis, etc., show that analyzing
contingency tables is in fact a very common and fun-
damental aspect of data analysis. Contingency tables
are usually analyzed using one of the many categori-
cal data analysis methods available in the literature.
When the data matrix is large, a clustering can
give a quicker and easier access to the data con-
tent than a method for reducing the dimensionality
of the features. Combining clustering and reduction
for mapping clusters rather than rows or columns is
therefore an interesting requirement for data analysis.
One way to fulfill this purpose is by showing the clus-
ters on a map after clustering the data by an ad’hoc
algorithm and reducing the feature space, both sep-
arately. Alternatively, the Kohonen’s self-organizing
map (SOM) (Kohonen, 1997) is such that the clus-
tering and the mapping of the clusters take place si-
multaneously while providing one final unique map.
The SOM algorithm is not derived exactly through the
optimization of an objective function, and several pa-
rameters have to to be set empirically.
A probabilistic model for SOM is appealing for
several reasons, the principal one is that a parametric
model is flexible and scalable when defined properly.
We are interested in proposing an efficient paramet-
ric model for a bidimensional mapping of the clusters
of I for a contingency table. Generative Topographic
Mapping (GTM) (Bishop et al., 1998) is a parametric
SOM with a number of advantages compared to the
standard SOM. It re-formulates SOM by embedding
the constraints of vicinity for the clusters in a Gaus-
sian mixture model (GMM) (McLachlan and Peel,
2000). Classical mixture models, and in particular
GMM, are generally not efficient for large datasets,
and this is also true of GTM. One possible alternative
to a clustering of rows or columns is a co-clustering
approach that clusters the two dimensions of a ma-
trix simultaneously and efficiently, with a competitive
small number of parameters.
Here we turn to the latent block model (see (Go-
vaert and Nadif, 2003)) with constraints in order to
simultaneously cluster and visualize the clusters. In
contrast to previous works like for instance (Kab´an
and Girolami, 2001), (Hofmann, 2000) or (K´aban,
2005), the proposed method is parsimonious since the
number of parameters remains constant when the size
of the data matrix increases.
The paper is organized as follows. In Section 2 we
review co-clustering for co-occurrence tables, and de-
scribe a Poisson latent block model (PLBM) (Govaert
and Nadif, 2010). We add constraints in the model
63
Priam R., Nadif M. and Govaert G. (2012).
NONLINEAR MAPPING BY CONSTRAINED CO-CLUSTERING.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 63-68
DOI: 10.5220/0003764800630068
Copyright
c
SciTePress

and propose an algorithm for the estimation of the pa-
rameters. In section 3 we present an evaluation of our
new method named BlockGTM. Finally, the conclu-
sion summarizes the advantages of our contribution.
2 BLOCK EM MAPPING
In latent block model (LBM) the n × d random vari-
ables generating the observed x
ij
cells of the data ma-
trix are assumed to be independent, once z and w are
fixed where the set of all possible assignments w of J
(resp. z of I) is denoted W (resp. Z ). The data matrix
x is therefore a set of cells:
(x
11
,x
12
,...,x
ij
,...,x
nd
),
rather than the sample of d-dimensional vectors in the
more classical mixture setting. The two sets of pos-
sible assignments w and z cluster the cells of the ma-
trix x into a number of contiguous, non-overlapping
blocks. A block kℓ is defined as the set of cells
{x
ij
;z
i
= k,w
j
= ℓ}. The binary classification matrix
z = (z
ik
)
n×g
is such that
∑
g
k=1
z
ik
= 1 and z
ik
= 1 in-
dicates the component of the row i, and similarly for
the columns with w = (w
jℓ
)
d×m
.
The following decomposition is obtained (Gov-
aert and Nadif, 2003) by independence of z and w,
by summing over all the assignments:
f
LBM
(x;θ) =
∑
(z,w)∈Z ×W
∏
i,k
p
z
ik
k
∏
j,ℓ
q
w
jℓ
ℓ
×
∏
i, j,k,ℓ
ϕ(x
ij
;α
kℓ
)
z
ik
w
jℓ
,
where ϕ(.;α
kℓ
) is a density function defined on the set
of reals R and {α
kℓ
} are unknown parameters. The
vectors of the probabilities p
k
and q
ℓ
that a row and a
column belong to the k-th component and to the ℓ-th
component are respectively denoted p = (p
1
,..., p
g
)
and q = (q
1
,...,q
m
). The set of parameters is denoted
θ and is compound of p and q plus α which aggre-
gates all the α
kℓ
. Hereafter, to simplify the notation,
the sums and the products relating to rows, columns
or clusters will be subscripted respectively by the let-
ters i, j or k, ℓ without indicating the limits of varia-
tion, which are implicit. Next, PLBM is described for
contincency tables and the constraints are added.
2.1 Poisson Latent Block Model
For co-occurrence tables, PLBM assumes that the
observed values x
ij
in a block kℓ are drawn from
a Poisson distribution P(λ
ij
kℓ
) with parameter λ
ij
kℓ
=
µ
i
ν
j
α
kℓ
where the effects µ = (µ
1
,...,µ
n
) and ν =
(ν
1
,...,ν
d
) are assumed equal to the margin totals
{µ
i
=
∑
j
x
ij
;1 ≤ i ≤ n} and {ν
j
=
∑
i
x
ij
;1 ≤ j ≤ d}.
Then ϕ for the block kℓ is defined as follows:
ϕ(x
ij
;µ
i
,ν
j
,α
kℓ
) =
exp(−µ
i
ν
j
α
kℓ
)(µ
i
ν
j
α
kℓ
)
x
ij
x
ij
!
.
Given that x
ij
∈ N
+
, the unknown parameter α
kℓ
of
the block kℓ is in [0;1], since x
ij
< µ
i
ν
j
. The set of
parameters θ of the model can be estimated by maxi-
mizing the log-likelihood:
L(x;θ) = log f
LBM
(x;θ).
2.2 Constrained Parameters
To induce a quantization with a large number of clus-
ters, the probabilities p
k
and q
ℓ
are fixed and equipro-
portional such that {p
k
= 1/g;1 ≤ k ≤ g} and {q
ℓ
=
1/m;1 ≤ ℓ ≤ m}. The parameters of the Poisson LBM
are parameterized with the fixed vectors {ξ
k
} defined
hereafter for the mapping of I, and the unknown vec-
tors {w
ℓ
∈ R
h
,1 ≤ ℓ ≤ m, h ∈ N
∗
+
} because α
kℓ
is de-
pendent on the index k and ℓ. The parameters {w
ℓ
}
are estimated by maximum likelihood. For defining
the vectors {ξ
k
}, it is considered the bidimensional
coordinates:
S = {s
k
= (s
k1
,s
k2
);k = 1, ...,g},
from the nodes of a regular mesh discretizing the
square where the data are projected [−1;1] × [−1;1].
S is similar to the set of nodes of SOM. As in GTM,
each coordinate s
k
is nonlinearly transformed by h ba-
sis functions φ such as:
ξ
k
= Φ(s
k
) = (φ
1
(s
k
),φ
2
(s
k
),. ..,φ
h
(s
k
))
T
,
where each basis function φ is a kernel-like function:
φ(s
k
) ∝ exp[−||s
k
− µ
φ
||
2
/2ν
2
φ
],
with a mean center µ
φ
∈ R
2
and a standard deviation
ν
φ
. It is then considered the inner products:
{w
T
ℓ
ξ
k
;1 ≤ k ≤ g,1 ≤ ℓ ≤ m}.
To map the inner product (w
T
ℓ
ξ
k
∈ R) onto its cor-
responding parameter (α
kℓ
∈ [0;1]) it is used a sig-
moidal function σ(.) as in (Girolami, 2001) such that
for 1 ≤ k ≤ g, 1 ≤ ℓ ≤ m, we have:
α
kℓ
= σ(w
T
ℓ
ξ
k
) =
exp(w
T
ℓ
ξ
k
)
1+ exp(w
T
ℓ
ξ
k
)
.
The relative ordering of the coordinates {s
k
=
(s
k1
,s
k2
);k = 1, ..., g} remains, at least locally, after
the transformation. The reduced g × m matrix α in
PLBM is replaced by an h× m matrix:
Ω = [w
1
|w
2
|···|w
m
].
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
64
The model remains parsimonious because h is small,
less than half of one hundred in practice.
Below we present an algorithm for the estima-
tion of the parameters θ = Ω, the matrix for the con-
straints. The optimization problem is slightly differ-
ent from the unconstrained case, as we shall explain
in the next section.
2.3 Parameter Estimates
For the proposed model with the introduced con-
straints, we aim to address the problem of parameters
estimation by a maximum likelihood (ML) approach
such that:
ˆ
θ = argmax
θ
L(x;θ).
For finding a suitable value of θ for the constrained
PLBM, the Block EM (BEM) (Govaert and Nadif,
2005) results in the following criterion (denoted
˜
Q for
short) which is maximized iteratively:
˜
Q
BlockGTM
(θ,θ
(t)
)
=
∑
i, j,k,ℓ
c
(t)
ik
d
(t)
jℓ
logϕ(x
ij
;α
kℓ
)
=
∑
i, j,k,ℓ
c
(t)
ik
d
(t)
jℓ
x
ij
logα
kℓ
− µ
i
ν
j
α
kℓ
+ cte
=
∑
k,ℓ
y
(t)
kℓ
logα
kℓ
− µ
(t)
k
ν
(t)
ℓ
α
kℓ
) + cte. (1)
Here cte is a constant independent of the parameters,
the index (t) permits to denote a current estimation
of a parameter or a function of the parameters. It is
also denoted y
(t)
kℓ
=
∑
i, j
c
(t)
ik
d
(t)
jℓ
x
ij
, µ
(t)
k
=
∑
i
c
(t)
ik
µ
i
, and
ν
(t)
ℓ
=
∑
j
d
(t)
jℓ
ν
j
, while given θ
(t)
, the quantities c
(t)
ik
(resp. d
(t)
jℓ
) are the posterior probabilities that a row
(resp. a column) belongs to the block kℓ. Here, the
posterior probabilities are estimated by using the de-
pendent equations:
c
(t)
ik
∝ exp
∑
jℓ
d
(t)
jℓ
logϕ(x
ij
;α
(t)
kℓ
)
!
, (2)
d
(t)
jℓ
∝ exp
∑
ik
c
(t)
ik
logϕ(x
ij
;α
(t)
kℓ
)
!
. (3)
At the ML, they are denoted { ˆc
ik
} and {
ˆ
d
jℓ
}. The pa-
rameters are estimated in an iterative way. The BEM
algorithm proceeds by an alternated maximization of
˜
Q. At each iteration the posterior probabilities {c
ik
}
and {d
jℓ
} are evaluated for all rows and all columns,
and just after the maximization of the function
˜
Q is
obtained with respect to the parameters. As a re-
mark, this induces a maximization with a variational
approximation at each iteration. Another approxima-
tion of the resulting criterion
˜
Q is also required at the
maximization step as explained in the following para-
graphs.
2.4 Algorithm
The algorithm for maximizing
˜
Q proceeds iteratively
by increasing an approximation of the log-likelihood
at each step. At the Maximization step we estimate
the next current value for θ
(t+1)
by:
θ
(t+1)
= argmax
θ
˜
Q(θ|θ
(t)
).
Let us have ε a small positive real. The algorithm for
finding the maximum likelihood solution is given in
Figure 1 (see Appendix for
˜
Q
(t)
ℓ
and
˜
H
(t)
ℓ
).
Learning algorithm for BlockGTM:
- Initialization:
Initialize {c
(0)
ik
}, {d
(0)
jℓ
} and Ω
(0)
.
- E-Step:
Compute {c
(t)
ik
} by (2), and {d
(t)
jℓ
} by (3) in a
loop.
- M-Step:
Compute the new parameters for ℓ = 1, . . . , m
w
(t+1)
ℓ
= w
(t)
ℓ
+
h
˜
H
(t)
ℓ
i
−1
∇
˜
Q
(t)
ℓ
, (4)
with ∇
˜
Q
(t)
ℓ
by (5) and
˜
H
(t)
ℓ
by (6).
- End:
If |Ω
(t+1)
− Ω
(t)
| < ε then stop else return E-
Step.
Figure 1: Iterations for BlockGTM.
Next, we evaluate the performance of BlockGTM for
several real datasets.
3 NUMERICAL EXPERIMENTS
In order to test the proposed method, we construct the
bidimensional projections of the obtained clusters by
the proposed method for four textual datasets.
3.1 Bi-dimensional Mapping
The set of bidimensional coordinates S for the g clus-
ters are used to find the final projection ˆs
i
of each
category i in the latent space. When a row i has a
higher posterior probability ˆc
ik
for a cluster k then it
belongs to this cluster and the label for the i-th row
NONLINEAR MAPPING BY CONSTRAINED CO-CLUSTERING
65
is estimated by ˆz
i
= k. This same row can then be
represented at the bidimensional coordinates ˆs
MAP
i
=
s
ˆz
i
= (s
ˆz
i
1
,s
ˆz
i
2
)
T
. By performing this procedure for
each row i, the model builds a reduced view of the
n categories of I. Moreover, when two nodes have
their coordinates s
k
and s
k
′
near in the latent space,
their corresponding clusters should have similar pa-
rameters α
kℓ
and α
k
′
ℓ
, so their corresponding contents
should be also similar. A fuzzy projection can be ob-
tained by computing an average position of each row
i from its posterior probabilities ˆc
ik
. This is written
ˆs
i
=
∑
g
k=1
ˆc
ik
(s
k1
,s
k2
)
T
. If the vector of probabilities
( ˆc
i1
, ˆc
i2
,··· , ˆc
ig
) is binary, then the row i is in the clus-
ter ˆz
i
, and ˆs
i
= ˆs
MAP
i
. This is generally the case for
GTM for a large part of the dataset. In the experimen-
tal part, it is constructed only a tabular view after bi-
narizing these vectors of probabilities, except a small
illustrative example.
3.2 Datasets
The characteristics of the four real datasets are de-
scribed below.
- N4. This dataset is composed of 400 documents
selected from a textual corpus of 20000 usenet
posts from 20 original newsgroups. From each
group among the 4 retained, 100 posts are selected
and 100 terms are filtered by mutual information
(Kab´an and Girolami, 2001).
- Binary
1
. This dataset in (Slonim et al., 2000)
consists of 500 posts separated into two clus-
ters for the newsgroups talk.politics.mideast and
talk.politics.misc. A preprocessing was carried
out by the authors to reduce the number of words
by ignoring all file headers, stop words and nu-
meric characters. Moreover, using the mutual in-
formation, the top 2000 words were selected.
- Multi5
1
. This dataset in (Slonim et al., 2000),
consists of 500 posts separated into five clus-
ters comp.graphics, sci.space, rec.motorcycles,
res.sports.baseball and talk.politics.mideast. The
same pre-processing than for Binary
1
was per-
formed.
- C3. This dataset in (Dhillon et al., 2003), also
known as Classic3, is often used as a benchmark
for co-clustering. This dataset is a contingency
table of size 3891 x 4303 and it is compound of
three classes denoted Medline, Cisi and Cranfield
as in the larger complete data sample not consid-
ered here.
These four datasets studied in our experiments are
of increasing size.
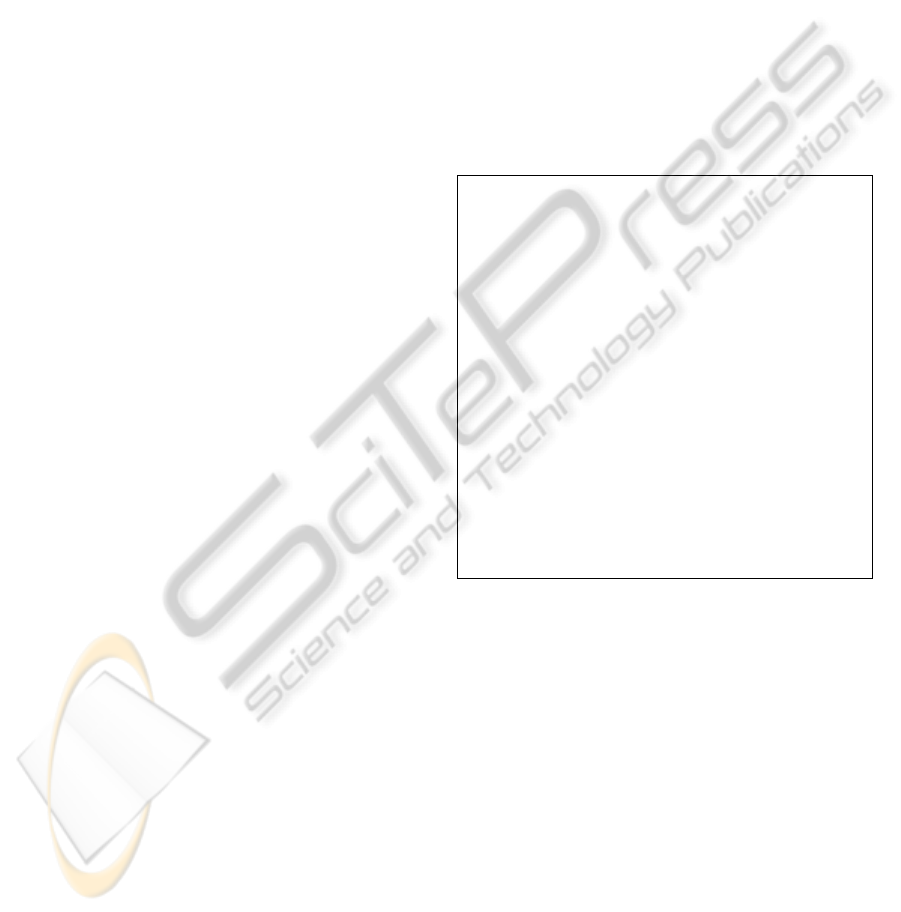
3.3 Results
Table 1 summarizes the characteristics of the datasets
and the parameters for BlockGTM. The four con-
structed maps are squares of size g = 9 × 9 for the
clustering in rows, while the number of clusters m in
columns and the dimension h were chosen after a few
tries. Each map is represented as following. For each
k-th cluster, a barplot corresponding to the true labels
of the data in the cluster is constructed at position s
k
after fitting the model. The results are shown in Fig-
ure 2 for Multi5
1
and C3. So, for a given dataset
the map shows a matrix of 9 × 9 barplots such as if
two nodes are close on the latent space they should
have similar barplots. This is a tabular view of the
data (categories I) which confirms also that the near-
est clusters have their texts with similar topics as ex-
pected.
Table 1: Summary where n×d is the size of the contingency
table, m is the number of clusters in columns, h is the num-
ber of basis functions, and E
r1
(resp. E
r2
) is the accuracy in
percent from BlockGTM (resp. PLBM).
Data n d m h E
r1
E
r2
N4 400 100 10 12 96.5 93.4
Binary
1
400 100 10 19 91.2 92.4
Multi5
1
500 2000 20 19 90.6 89.0
C3 3891 4303 20 28 99.1 99.3
In this section we are interested on measuring how
well the co-clustering can reveal the inherent struc-
ture of a given textual dataset. We consider the ac-
curacy which is usually derived from the confusion
matrix or the cluster purity. Specifically, we mea-
sure the quality of the clustering for the obtained clus-
ters comparatively to the real categories of the docu-
ments. The columns E
r1
and E
r2
of Table 1 give, in
percent, the accuracy obtained respectively for Block-
GTM and PLBM initialized with the final parameters
of BlockGTM.
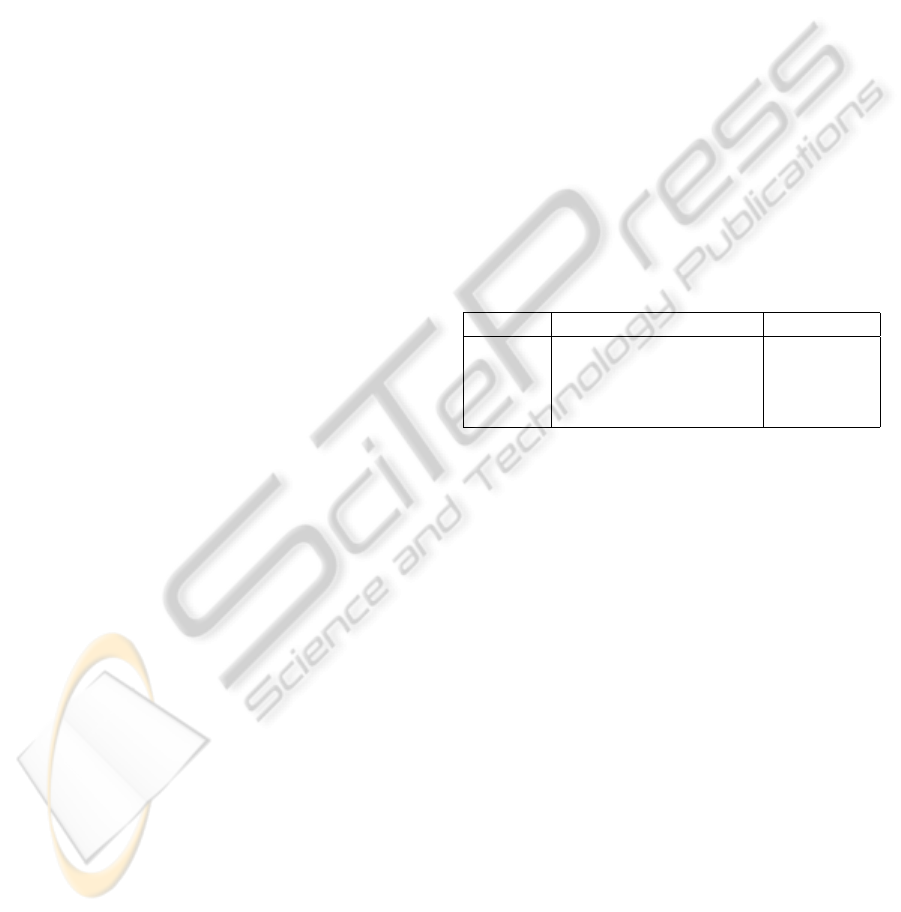
- For N4, the categories of I are projected by the
Correspondence Analysis (CA) method (Benze-
cri, 1980). The coordinates from CA are used
to compute the positions of the mean centers in
a 3-dimensional space thanks to the quantities ˆc
ik
.
Figure 3 shows the result. It is interesting to note
that the original mesh compound of the nodes S
in the latent space is easily recognized in this 3-
dimensional space. Here each class is quantized
by a subset of clusters from the map, and the sub-
set usually includes only data with their corre-
sponding projections close in the space of projec-
tion as expected.
- For C3, the proposed method extracts the origi-
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
66
(a) (b)
Figure 2: The result from the proposed method for the datasets (a) Multi5
1
, and (b) C3.
−2
−1
0
1
2
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
Figure 3: A result from BlockGTM for N4 in the 3-
dimensional space of the projection with the 3 first principle
factorial directions of CA.
nal clusters almost correctly. The accuracy of the
method is 1 − 33/3891 = 99.15%, while the co-
clustering based on (Dhillon et al., 2003) has an
accuracy of 97.74 = 1− 88/3891 so the obtained
error is smaller. The macro-clustering comes after
a finer clustering and is better able to separate the
different classes.
- For Binary
1
and Multi5
1
, Table 2 reports the
resulting accuracies for BlockGTM, PLBM,
IB
double
(Slonim et al., 2000), and IDC-15 (El-
yaniv and Souroujon, 2001). This helps for the
comparison between the different results. Despite
a slightly different error rate, the proposed method
is able to map the whole datasets and separate the
natural classes. The main difference with the al-
ternative approaches is not only the efficient co-
clustering, but also the capacity to provide a quick
Table 2: Accuracy for BlockGTM, PLBM, IB
double
, IDC.
BlockGTM PLBM IB
double
IDC-15
Binary
1
91.2 92.4 70 85
Multi5
1
90.6 89.0 59 86
visual overview of the proximities between the
clusters.
4 CONCLUSIONS
We have proposed an embedding of the projection
of co-occurrence tables in the Poisson latent block
mixture model. The presented model is parsimo-
nious when compared to the existing alternatives in
the domain. The empirical results obtained show that
BlockGTM is able to present a quick summary of the
dataset contents. So the approach is interesting for
data analysis of large contingency tables.
ACKNOWLEDGEMENTS
This research was supported by the CLasSel ANR
project ANR-08-EMER-002.
REFERENCES
Benzecri, J. P. (1980). L’analyse des donn´ees tome 1 et 2 :
l’analyse des correspondances. Dunod.
Bishop, C. M., Svens´en, M., and Williams, C. K. I. (1998).
Developpements of generative topographic mapping.
Neurocomputing, 21:203–224.
B¨ohning, D. and Lindsay, B. (1988). Monotonicity of
quadratic-approximation algorithms. Annals of the In-
stitute of Statistical Mathematics, 40(4):641–663.
NONLINEAR MAPPING BY CONSTRAINED CO-CLUSTERING
67

Deerwester, S., Dumais, S. T., Furnas, G. W., Landauer,
T., and Harshman, R. (1990). Indexing by latent se-
mantic analysis. Journal of the American Society for
Information Science 41(6):391-407.
Dhillon, I. S., Mallela, S., and Modha, D. S. (2003).
Information-theoretic co-clustering. In Proceedings of
The Ninth ACM SIGKDD International Conference on
Knowledge Discovery and Data Mining(KDD-2003),
pages 89–98.
El-yaniv, R. and Souroujon, O. (2001). Iterative dou-
ble clustering for unsupervised and semi-supervised
learning. In In Advances in Neural Information Pro-
cessing Systems (NIPS, pages 121–132.
Girolami, M. (2001). The topographic organization and vi-
sualization of binary data using multivariate-bernoulli
latent variable models. IEEE Transactions on Neural
Networks, 20(6):1367–1374.
Govaert, G. and Nadif, M. (2003). Clustering with block
mixture models. Pattern Recognition, 36(2):463–473.
Govaert, G. and Nadif, M. (2005). An EM algorithm for
the block mixture model. IEEE Trans. Pattern Anal.
Mach. Intell., 27(4):643–647.
Govaert, G. and Nadif, M. (2010). Latent block model
for contingency table. Communications in Statistics-
theory and Methods, 39:416–425.
Hofmann, T. (1999). Probabilistic latent semantic analysis.
SIGIR’99, pages 50–57.
Hofmann, T. (2000). Probmap - a probabilistic approach
for mapping large document collections. Intell. Data
Anal., 4(2):149–164.
Kab´an, A. (2005). A scalable generative topographic map-
ping for sparse data sequences. In ITCC ’05: Pro-
ceedings of the International Conference on Informa-
tion Technology: Coding and Computing (ITCC’05) -
Volume I, pages 51–56, Washington, DC, USA. IEEE
Computer Society.
Kab´an, A. and Girolami, M. (2001). A combined latent
class and trait model for analysis and visualisation of
discrete data. IEEE Trans. Pattern Anal. and Mach.
Intell., pages 859–872.
Kohonen, T. (1997). Self-organizing maps. Springer.
McLachlan, G. J. and Peel, D. (2000). Finite Mixture Mod-
els. John Wiley and Sons, New York.
Slonim, N., Tishby, N., and Y, Y. I. (2000). Document clus-
tering using word clusters via the information bottle-
neck method. In In ACM SIGIR 2000, pages 208–215.
ACM press.
APPENDIX
We have to find a zero for the
˜
Q function such that for
all ℓ, we have
∂
˜
Q(θ|θ
(t)
)
∂w
ℓ
w
(t+1)
ℓ
= 0. Considering the
usual Newton-Raphson algorithm for the proposed
model, the maximizing step w.r. w
ℓ
is written as in
Formula (4).
Then, keeping only the sum on k for ℓ constant, the
score for the criterion maximized at the t-th iteration
with respect to w
ℓ
can be written:
∇
˜
Q
(t)
ℓ
=
∂
˜
Q
BlockGTM
(θ,θ
(t)
)
∂w
ℓ
=
∑
k
y
(t)
kℓ
∂logα
kℓ
∂w
ℓ
− µ
(t)
k
ν
(t)
ℓ
∂α
kℓ
∂w
ℓ
=
∑
k
n
y
(t)
kℓ
(1− α
kℓ
)ξ
k
− µ
(t)
k
ν
(t)
ℓ
α
kℓ
(1− α
kℓ
)ξ
k
o
=
∑
k
(1− α
kℓ
)
n
y
(t)
kℓ
− µ
(t)
k
ν
(t)
ℓ
α
kℓ
o
ξ
k
=Φ
T
(I
g
− A
ℓ
)
h
y
ℓ
− ν
(t)
ℓ
A
ℓ
µ
i
(5)
where we denote µ = (µ
1
,µ
2
,··· ,µ
g
)
T
and the diago-
nal matrix A
ℓ
= diag
1≤k≤g
(α
kℓ
) at step (t).
Similarly, the second-order derivative of the crite-
rion gives the Hessian matrix which is written:
∇
2
˜
Q
ℓ
=
∂
˜
Q
BlockGTM
(θ,θ
(t)
)
∂w
T
ℓ
∂w
ℓ
= −
∑
k
(1− α
kℓ
)α
kℓ
n
y
kℓ
+ (1− 2α
kℓ
)µ
(t)
k
ν
(t)
ℓ
o
ξ
T
k
ξ
k
= − Φ
T
A
ℓ
(I
g
− A
ℓ
)
Y
ℓ
+ ν
ℓ
(I
g
− 2A
ℓ
)M
µ
Φ,
where we have at step (t), Y
ℓ
= diag
1≤k≤g
(y
kℓ
) and
M
µ
= diag
1≤k≤g
(µ
k
) .
A lower bound of this matrix is proposed in order
to improve the maximization step. This symmetric
matrix
˜
H
ℓ
is strictly negative-definite for all parame-
ters {α
kℓ
,1 ≤ k ≤ g} remaining in ]0;1[, and satisfies
the inequality:
˜
H
ℓ
= −Φ
T
A
ℓ
(I
g
− A
ℓ
)
Y
ℓ
+ ν
ℓ
M
µ
Φ (6)
≤ ∇
2
˜
Q
ℓ
.
This new matrix is able to increase the criterion to be
maximized (see (B¨ohning and Lindsay, 1988)) in the
Newton-Raphson algorithm, while providing a more
stable learning behavior than the original Hessian ma-
trix, so this solution has been preferred in the experi-
ments.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
68
