
HOW TO SELECT USEFUL HAND SHAPES FOR HAND GESTURE
RECOGNITION SYSTEM
Atsushi Shimada
1
, Takayoshi Yamashita
2
and Rin-ichiro Taniguchi
1
1
Graduate School and Faculty of Information Science and Electrical Engineering, Kyushu University, Fukuoka, Japan
2
OMRON Corporation, Shiga, Japan
Keywords:
Hand gesture recognition, Selection, Supporting system.
Abstract:
This paper discusses hand shapes for Human Computer Interface. Usually, a hand gesture based Human
Computer Interface is developed by human centered design concept. A system designer or developer tends to
select hand shapes by himself/herself without verifying practical effectiveness from the standpoint of system
aspect. Instead, a methodology of training and recognition of hand shapes is often discussed. On the other
hand, this paper listens to system’s voice; which hand shape is easy to be recognized, which is easy to be
confused and so on. Actually, 37 kinds of tentative hand shapes were investigated from the viewpoint of
system-friendly hand shape. Based on the result, a supporting system was developed for a system designer,
which helps to findappropriate hand shapes which satisfy both “user-friendly” and “system-friendly” demand.
1 INTRODUCTION
Recent years, hand gesture has been widely used for
Human Computer Interface(HCI). Vision-based ap-
proach is an attractive way to realize hand gesture ap-
plications since people can send a command to a com-
puter without putting a special sensor (such as hand
glove, physical sensor and so on) on his/her hands
(Zabulis et al., 2009; Wachs et al., 2011). Generally,
vision-based hand gesture recognition can be divided
into two issues; a motion issue (Chen et al., 2008) and
a shape issue (Wang and Wang, 2007). In some liter-
atures, these issues are discussed in the lump. This
paper is concerned with a hand shape issue.
There are mainly two approaches to recognize a
hand shape. One is a model-based approach (de La
Gorce et al., 2008) and the other is an appearance-
based approach (Martin and Crowley, 1997). This
paper focuses on the appearance-based hand shape
recognition. One of the straight forward ways is to
let a system train a lot of training samples includ-
ing various changes of appearance. When the num-
ber of shapes is relatively small, such an approach
works well. However, if many kinds of shapes are re-
quired, some shapes are sometimes confused as other
shapes. The problem is often caused by the rotation
of the wrist. When the wrist rotates to a certain direc-
tion, the appearance will change, and the changed ap-
pearance sometimes becomes similar with other hand
shape. Traditional researches tended to select expe-
dient shapes and/or set a constraint on the rotation to
avoid this problem.
This paper discusses a matter of selecting hand
shapes, which is absolutely imperative to develop a
HCI based on hand gesture. Although many litera-
tures discuss the novel methodology of recognition,
extraction of effective/powerful visual features and so
on, this paper does not treat such a theme. Instead,
this paper backs to basics of system design and pro-
vide a discussion about what kinds of hand shapes are
useful for hand-gesture based applications.
When a new hand-gesture based system is de-
signed, two aspects should be considered. If a user
or a system designer can liberally choose hand shapes
which he/she wants to use, it is a favorable condi-
tion from a human stand point. We call them “user-
friendly” hand shapes. On the other hand, a system
would hope discriminative hand shapes, which are
called as “system-friendly” hand shapes in this paper.
Therefore, a system designer has to search for com-
mon ground which satisfies both requirements. To
help such a system designer, this research provides
a supporting system for hand shape selection. All the
designer has to do is to select some hand shapes as
he/she like. The system feeds back five barometers
based on the selected hand shapes. Through the in-
teraction with the system, a designer can find a meet-
ing point, which means that the system accepts the
394
Shimada A., Yamashita T. and Tanguchi R. (2012).
HOW TO SELECT USEFUL HAND SHAPES FOR HAND GESTURE RECOGNITION SYSTEM.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 394-399
DOI: 10.5220/0003767603940399
Copyright
c
SciTePress

㼻
㼻
㼻㼻
㼻㼻
Figure 1: Environment of capturing hand shapes
-20㼻
90㼻
-90㼻
7
0㼻
-90㼻90㼻
pitch
yaw
roll
Figure 2: Rotation ranges
request from the designer as much as possible and the
designer also accepts the system’s requirement.
2 EVALUATIVE ENVIRONMENT
To realize a supporting system for hand shape selec-
tion, 37 kinds of hand shapes with various rotations
were captured by a camera. Then, visual similarity
within/among shapes was evaluated. Besides, recog-
nition accuracy was investigated. These evaluations
were conducted under three situations.
Case 1 all shapes with all rotations
Case 2 limited shapes with all rotations
Case 3 all shapes with limited rotations
2.1 Rotation Ranges of Wrist
As shown in Figure 1, hand shapes were captured by
a camera fixed in front of the hand. The arm was
fixed by handmade equipment. The appearance of
hand shapes could be changed by three rotations as
roll, pitch and yaw(see Figure 2) constrained by the
ranges below.
roll: clockwise rotation, −90
◦
∼ 70
◦
pitch: front-back direction, −90
◦
∼ 90
◦
yaw: horizontal direction, −20
◦
∼ 90
◦
Note that these rotation ranges cover the range of
movement of human wrist. Some examples are shown
in Figure 3.
2.2 Hand Shapes
Our research picked up 37 hand shape classes(see Fig-
㼻
㼻
㼻㼻
㼻㼻
Figure 3: Examples of captured hand shapes
ure 4) which are used in sign language communica-
tion in Japan. The selected hand shapes can be clas-
sified into three groups; 23 kinds of shapes classes
in which fingers point upward, sideways for 7 shape
classes and downward for 7 shape classes. As we
can see, there are some similar shapes even though
all shapes are captured in basic positions (i.e. no rota-
tion) in Figure. 4. Besides, some hand shapes become
similar if the shapes rotate in the yaw direction (e.g.
class 25 and class 34).
2.3 Detection of Hand Shape Region
Hand shape masks were detected from about 20,000
images collected by 4 examinees. The captured image
size was 640x480, and the detected region was resized
into 100x100 pixels. Then, the image was converted
to gray scale followed by histogram normalization.
2.4 Evaluation of Similarity
The similarity was evaluated by L2 norm between two
hand shape images, i.e. accumulation of L2 distances
between corresponding pixels. To acquire the sim-
ilarity score within the class, the average L2 norm
was calculated from all possible combinations. The
smaller the average L2 norm is, the less the appear-
ance changes within the class. On the other hand,
to acquire the similarity score between two classes,
the L2 norm was calculated between representative
shapes of each class. The representative shape was
acquired by averaging all images within the class. To
avoid the conflict among shape classes, it is better for
the score to be large. Based on these two scores, the
conflict score is defined by
E
i, j
=
d
i
+ d
j
D
i, j
(1)
where d
i
and D
i, j
are the L2 norm within the class i
and between the class i and j respectively. With de-
HOW TO SELECT USEFUL HAND SHAPES FOR HAND GESTURE RECOGNITION SYSTEM
395

1 2 3 4 5 6 7 8 9 10 11 12
13 14 15 16 17 18 19 20 21 22 23
24 25 26 27 28 29 30
31 32 33 34 35 36 37
Figure 4: 37 Kinds of hand shapes
creasing the E
i, j
, corresponding two classes i and j
can be distinguished well from each other. Besides,
the class score is defined by
S
i
=
1
N
∑
j
E
i, j
. (2)
The smaller score S
i
is preferable from the viewpoint
of voiding the confusion with other shape classes.
2.5 Evaluation of Recognition Accuracy
Recognition accuracy is investigated through leave-
one-out cross validation. The recognition is per-
formed by searching the most similar image in the
training samples. To avoid the curse of dimension-
ality, all the images are analyzed by PCA(Principal
Component Analysis) and the number of dimensions
was reduced from 10,000 (100x100) to 100 before
recognition process.
3 EVALUATION RESULTS
3.1 Experimental Procedure
As described in section 1, three situations are assumed
in the experiment. Here, the more detailed conditions
are described as follows.
Case 1 all 37 hand shape classes with all rotations
Case 2 selected 20 hand shape classes with all rota-
tions
Case 3 all 37 hand shape classes with limited rota-
tions
In each case, the conflict score E
i, j
and class score S
i
are calculated.
In the Case 1, all shapes with all rotations are eval-
uated. Based on the result of Case 1, 20 hand shape
classes are selected in the Case 2. In the Case 3, the
rotations of the wrist are restricted as follows.
roll: clockwise rotation, −20
◦
∼ 20
◦
pitch: front-back direction, −20
◦
∼ 20
◦
yaw: horizontal direction, −20
◦
∼ 20
◦
Examples of hand shapes in the condition of Case 3
are shown in Figure 5. The appearance change in
Figure 5 becomes smaller compared with the images
shown in Figure 3.
3.2 Results
The class score S
i
and recognition accuracy are shown
in Table 1 and Table 2. In the Case 2, 17 shape
classes were excluded from evaluation. In Table 1 and
Table 2, the scores of excluded classes are drawn by
the “–” mark. For example, the class 4 and 5 had a
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
396
Table 1: Class score.
Class Case 1 Case 2 Case 3 Class Case 1 Case 2 Case 3
1 5.3 – – 20 3.6 3.6 2.1
2 3.9 3.5 2.4 21 3.3 3.3 2.1
3 3.9 3.5 2.3 22 3.4 3.3 2.0
4 4.8 4.7 3.3 23 4.0 4.1 2.3
5 3.9 3.6 2.3 24 2.7 – –
6 3.5 3.4 2.3 25 2.3 2.4 1.7
7 3.3 – – 26 2.1 – –
8 5.2 – – 27 2.8 – –
9 3.8 – – 28 2.0 – –
10 3.5 3.4 2.2 29 3.3 2.8 2.0
11 4.0 – – 30 2.5 2.6 1.9
12 3.8 3.4 2.3 31 3.1 3.2 2.4
13 3.3 – – 32 3.2 – –
14 3.2 3.3 2.0 33 3.1 – –
15 3.6 – – 34 3.1 3.1 2.2
16 3.6 3.2 2.1 35 3.3 – –
17 3.6 – – 36 3.2 – –
18 3.1 3.0 1.9 37 3.8 3.8 2.6
19 3.7 – –
Table 2: Recognition accuracy.
Class Case 1 Case 2 Case 3 Class Case 1 Case 2 Case 3
1 0.40 – – 20 0.53 0.73 0.91
2 0.19 0.40 0.65 21 0.53 0.58 0.79
3 0.27 0.37 0.50 22 0.44 0.45 0.59
4 0.55 0.64 0.81 23 0.69 0.72 0.94
5 0.57 0.67 0.82 24 0.52 – –
6 0.49 0.52 0.74 25 0.33 0.60 0.96
7 0.58 – – 26 0.23 – –
8 0.32 – – 27 0.14 – –
9 0.76 – – 28 0.43 – –
10 0.41 0.52 0.56 29 0.39 0.73 0.92
11 0.37 – – 30 0.63 0.70 0.90
12 0.60 0.65 0.69 31 0.34 0.48 0.57
13 0.42 – – 32 0.40 – –
14 0.69 0.72 0.86 33 0.47 – –
15 0.62 – – 34 0.47 0.72 0.87
16 0.48 0.53 0.64 35 0.25 – –
17 0.55 – – 36 0.33 – –
18 0.57 0.59 0.69 37 0.36 0.42 0.53
19 0.39 – –
tendency of conflict with other classes. The conflict of
class 5 was resolved in the Case 3 where the rotations
were restricted in smaller ranges.
Totally, the class score S
i
became smaller from
Case 1 to Case 3. Reducing the number of classes
and restricting the ranges of rotation contributed to
resolve the conflict among classes. Especially, the
range limitation produced larger effect compared with
reducing the number of classes. With regard to the
recognition accuracy, the scores of class 2, 20, 25,
29 and 34 were improved by reducing the number of
classes (compare the accuracy score between Case 1
and Case 2). Besides, the Case 3 showed greater im-
provement of accuracy compared with Case 2.
HOW TO SELECT USEFUL HAND SHAPES FOR HAND GESTURE RECOGNITION SYSTEM
397

Figure 5: Examples of captured hand shapes with limitation
of rotations.
3.3 System-friendly Hand Shapes
Based on the evaluation results above, this paper
provides some rankings of “system-friendly” hand
shapes. The “system-friendly” score is calculated
from the class score S
i
and the recognition accuracy
P
i
as follows.
C
i
=
P
i
S
i
(3)
The larger value of C
i
denotes the hand shape class i
will cause less conflict and provide higher recognition
accuracy. Therefore, the ranking of system-friendly
hand shapes can be made from arranging the C
i
in de-
scending order. Table 3 indicates the guide of select-
ing the hand shapes based on system-friendly ranking.
4 SUPPORTING SYSTEM FOR
HAND SHAPE SELECTION
The authors developed a supporting system for hand
shape selection
1
. A system designer/ developer can
investigate whether the selected hand shapes are
system-friendly or not. The user interface of the sys-
tem is shown in Figure. 6. All the user has to do is to
select preferable, i.e. “user-friendly” hand shapes by
clicking the hand shape image. The system feeds back
five barometers according to the selected hand shapes
from the viewpoint of “system-friendly” hand shapes.
The barometers consist of following five items.
# of Shapes. The number of shapes selected by the
user.
Variation. How wide the rotation ranges are avail-
able. (The max score denotes that all rotations are
available.)
1
The system will be available on our Web in the near
future.
Table 3: Ranking of System-Friendly Hand Shapes.
Ranking Case 1 Case 2 Case 3
1 30 30 25
2 28 14 30
3 14 18 29
4 9 23 20
5 24 21 14
6 18 12 23
7 7 34 34
8 23 20 21
9 15 5 18
10 21 25 5
11 12 6 6
12 34 16 16
13 17 22 12
14 33 29 22
15 20 10 2
Separation. How correctly the shape is distinguished
from others. (This barometer is calculated based
on S
i
and E
i, j
.)
Accuracy. How correctly the shape is recognized.
(This barometer is calculated by recognition ac-
curacy.)
Total. The comprehensive score based on above four
items.
These barometers are drawn on the radar chart(see the
bottom-left in Figure 6).
The user can select two restricted situations,
which correspond to the Case 2 and Case 3 mentioned
above. If the user push the “Limited Shapes” button,
the system responds the barometers on the basis of the
situation of Case 2. Therefore, the user can confirm
the effectiveness of eliminating some shapes which
are easily misrecognized shapes. Similarly, the effec-
tiveness of restriction of rotation ranges is given by
pushing the “Limited Ranges” button.
5 CONCLUSIONS
This paper discussed about hand shape selection.
When a new hand-gesture based HCI system is de-
signed, a designer can easily know what the system-
friendly hand shape is. To develop a supporting sys-
tem for hand shape selection, 37 candidates of hand
shape were captured with various rotations. Then, all
the hand shapes were evaluated by several methods
including how easily the shape is distinguished from
others, how correctly the shape is recognized and so
on. Besides, such evaluations were performed under
two situations; limited shapes and limited rotations.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
398
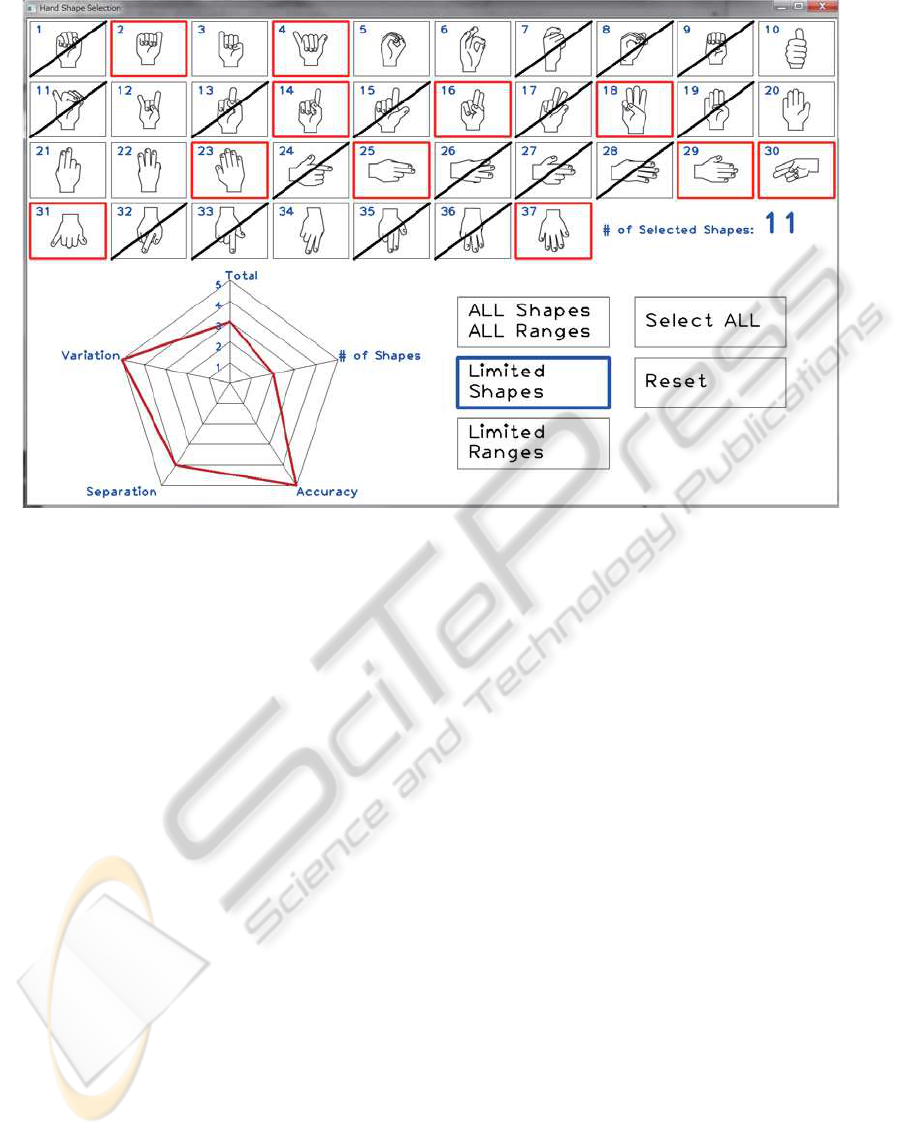
Figure 6: User interface of supporting system for hand shape selection.
Through the system, the user can try to find com-
mon ground between “user-friendly” and “system-
friendly” hand shapes. We are now investigating
whether the selected shapes outperform randomly se-
lected ones by using several recognition strategies,
e.g. LSH based approach, and Randomized Trees
based approaches and so on. Future work includes
developing another interactive system for motion is-
sue of hand gesture recognition.
REFERENCES
Chen, Q., Georganas, N. D., and Petriu, E. M. (2008).
Hand gesture recognition using haar-like features and
a stochastic context-free grammar. Ieee Transactions
On Instrumentation And Measurement, 57(8):1562–
1571.
de La Gorce, M., Paragios, N., and Fleet, D. J. (2008).
Model-based hand tracking with texture, shading and
self-occlusions. In CVPR08, pages –1–1.
Martin, J. and Crowley, J. L. (1997). An appearance-
based approach to gesture-recognition. In Proceed-
ings, ICIAP, pages 340–347.
Wachs, J. P., Kolsch, M., Stern, H., and Edan, Y. (2011).
Vision-based hand-gesture applications. Commun.
ACM, 54:60–71.
Wang, C.-C. and Wang, C.-C. (2007). Hand posture recog-
nition using adaboost with sift for human robot inter-
action. In Proceedings of the International Confer-
ence on Advanced Robotics (ICAR07), Jeju, Korea.
Zabulis, X., Baltzakis, H., and Argyros, A. (2009).
Vision-based Hand Gesture Recognition for Human-
Computer Interaction, pages 1–30. Lawrence Erl-
baum Associates, Inc. (LEA).
HOW TO SELECT USEFUL HAND SHAPES FOR HAND GESTURE RECOGNITION SYSTEM
399
