
ON THE CROSSOVER OPERATOR FOR GA-BASED OPTIMIZERS
IN SEQUENTIAL PROJECTION PURSUIT
Soledad Espezua, Edwin Villanueva and Carlos D. Maciel
Sao Carlos School of Engineering, University of Sao Paulo, Sao Carlos, Brazil
Keywords:
Projection pursuit, Sequential projection pursuit, Genetic algorithms, Crossover operators.
Abstract:
Sequential Projection Pursuit (SPP) is a useful tool to uncover structures hidden in high-dimensional data
by constructing sequentially the basis of a low-dimensional projection space where the structure is exposed.
Genetic algorithms (GAs) are promising finders of optimal basis for SPP, but their performance is determined
by the choice of the crossover operator. It is unknown until now which operator is more suitable for SPP. In this
paper we compare, over four public datasets, the performance of eight crossover operators: three available in
literature (arithmetic, single-point and multi-point) and five new proposed here (two hyperconic, two fitness-
biased and one extension of arithmetic crossover). The proposed hyperconic operators and the multi-point
operator showed the best performance, finding high-fitness projections. However, it was noted that the final
selection is dependent on the dataset dimension and the timeframe allowed to get the answer. Some guidelines
to select the most appropriate operator for each situation are presented.
1 INTRODUCTION
The collection of data sets with large amounts of mea-
sured features is becoming increasingly common in
many industrial and science areas. This makes di-
mension reduction an active research topic in data
mining, machine learning and statistics. Projection
pursuit (PP) (Friedman and Tukey, 1974; Friedman,
1987) is a framework of methods proposed to deal
with such high-dimensional data sets that has become
very popular in the statistical literature. PP faces the
curse of dimensionality by searching for ”interest-
ing” low-dimensional projections of the data, where
the interestingness of the projections is assessed by a
pre-defined function, known as projection pursuit in-
dex (PP index). Thus, the most interesting projection
spaces are found by optimizing such function.
A wide range of data-mining problems can be
tackled with PP (Daszykowski et al., 2007), depend-
ing on the PP index used. For instance, PP can
perform the well known principal components anal-
ysis - PCA, with the variance being the PP index
(Daszykowski et al., 2007). Several PP indices have
been proposed in the literature for different applica-
tions (some reviews can be found in (Berro et al.,
2010; Rodriguez-Martinez et al., 2010; Jee, 2009; Lee
et al., 2005)). Indeed, there are PP indices suitable
for clustering analysis (Bolton and Krzanowski, 2003;
Pena and Prieto, 2001), classification (Demirci et al.,
2008; Lee et al., 2005), feature selection (Guo et al.,
2001) and regression analysis (Ren et al., 2007).
One of the major problem in PP lies in the opti-
mization of the PP indices (Berro et al., 2010). Most
optimization methods were developed in the con-
text of exploratory projection pursuit - EPP, where
the target space is of one, two or three dimensions
(Bolton and Krzanowski, 2003; Nason, 1995; Posse,
1995a; Posse, 1995b; Posse, 1990; Friedman, 1987).
Gradient-based methods were the first to be used
(Jones and Sibson, 1987; Huber, 1985). However, it
was noted that such methods can easily get stuck in lo-
cal optima close to the starting point, capturing noise-
induced structures (Friedman, 1987). This led some
researches to develop more global optimization meth-
ods, such as (Pena and Prieto, 2001; Posse, 1995a)
and (Friedman, 1987). Although their proposals are
appropriate for EPP, they have difficulties to scale
beyond three-dimensional projections, mainly due to
computational constraints in computing the indices in
such spaces. This difficulty was circumvented with
the emergence of the sequential projection pursuit
(SPP) (Guo et al., 2000), an algorithm that can per-
form projections onto higher-than-three dimensional
spaces in a simple way. SPP opened new possibilities
for PP, such as feature selection (Guo et al., 2001) and
feature extraction for machine learning (Rodriguez-
93
Espezua S., Villanueva E. and D. Maciel C. (2012).
ON THE CROSSOVER OPERATOR FOR GA-BASED OPTIMIZERS IN SEQUENTIAL PROJECTION PURSUIT.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 93-102
DOI: 10.5220/0003784400930102
Copyright
c
SciTePress

Martinez et al., 2010). In SPP, the bases of the pro-
jection space (PP factors) are sought one after the
other instead of all together. Each PP factor is ob-
tained by optimizing one-dimensional PP index over
residual data (data resulting from removing the struc-
ture found in the previous PP factors). A binary ge-
netic algorithm (GA) was presented as the index op-
timizer of SPP. The use of a GA for optimizing PP
indices was also proposed by (Chiang et al., 2001)
in the so-called projection pursuit evolutionary algo-
rithm (PPEA). (Webb-Robertson et al., 2005) argued
later that the GA optimizer in SPP is slow in obtain-
ing the PP factors and proposed an alternative to it:
the random scan sampling algorithm (RSSA). Some
other global methods for optimization of PP indices
were proposed in recent years, such as simulated an-
nealing (SA) (Lee et al., 2005) and particle swarm op-
timization (PSO) (Berro et al., 2010).
Based in the success of GA in many problems,
we believe that their potential was underexplored as
optimizers for SPP. Some desirable features of GAs
are attractive for SPP, such as (Srinivas and Patnaik,
1994): 1) GAs can search the solution space (that is
known to be multimodal) in a parallel and multidi-
rectional way, giving more chance to find highly in-
formative projections; 2) at any time we can take a
solution, which get better with time; 3) one can con-
trol the diversity of the population, which can be use-
ful for EPP since many alternative solutions are re-
quired for inspection; and 4) GAs can be straightfor-
wardly implemented in parallel and distributed plat-
forms, expanding the applicability of PP to problems
with huge data sets. Despite these desirable features,
the performance of a GA is determined by the set of
genetic operators and parameters used, whose deter-
mination is not an easy task and heavily dependent on
the problem addressed. In particular, the choice of the
crossover operator is of key importance in the success
of a GA, since it is the primary search mechanism
that a GA relies, responsible for the rapid exchange
of useful information among solutions to locate better
solutions (Srinivas and Patnaik, 1994). Despite the
acceptable results reported with the crossover opera-
tors used in the original SPP and PPEA, the selection
of them was arbitrary. Nevertheless, it is unknown if
some other operators can perform better in the opti-
mization of PP factors for SPP.
Moving in this direction, we present in this
paper a comparative experimental study of eight
crossover operators: three currently used in SPP and
PPEA (arithmetic crossover and single and multi-
point crossover) and five new proposed here (one sin-
gle extension of the arithmetic crossover, two hyper-
conic crossovers and two fitness-biased crossovers).
The performance of the crossover operator in a pro-
totypical GA is assessed by measuring the mean fit-
ness of the population at different stages of evolution
and the converged fitness and number of generations
needed to converge. The study was carried out over
four public datasets of increasing dimension ranging
from 13 to 166 variables. Also, the influence of the
evolutionary pressure in the performance of the differ-
ent operators is analyzed. The results showed that the
proposed hyperconic crossover operators tend to find
projections with fitness values higher than the other
operators, with one of such operators clearly excelling
in higher dimensions. The multi-point crossover was
also competitive in low dimensions. The final selec-
tion of the crossover operator is dependent on the
dataset dimension and the tolerable time to get the
answer. Some guidelines to aid in the selection of
the most suitable crossover operator for SPP are pre-
sented.
The paper is organized as follows. Section 2 intro-
duces some important concepts of PP, SPP, and GAs.
Section 3 describes the crossover operators studied.
Section 4 presents the experimental setup. The re-
sults and discussions are presented in Sections 5 and
6. Finally, our conclusions are presented in Section 7.
2 BACKGROUND
2.1 Projection Pursuit
The projection pursuit concept was formally intro-
duced in the paper of (Friedman and Tukey, 1974),
although the seminal ideas were originally posed by
(Kruskal, 1969). To describe the idea of PP we as-
sume that the data set is arranged in a n × p matrix
X with n instances and p attributes or variables. PP
seeks a m-dimensional projection space (m < p), de-
fined by the orthonormal bases A ∈ R
p×m
, where the
projected data X ·A expose information of interest.
The degree of interestingness of the projection is mea-
sured by the function I, called the projection pursuit
index (PP index). Thus, PP can be formulated as the
optimization problem:
A
∗
= argmax
A
{I(X ·A)} (1)
s.t A
T
·A = I.
The choice of the PP index is a key considera-
tion. A great deal of research has been centered on
the construction of a globally useful and robust in-
dex, but the effectiveness of an index is often depen-
dent on the application and characteristics of the given
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
94

dataset (Rodriguez-Martinez et al., 2010). One domi-
nant consideration in the developing of PP indices has
been the so-called affine invariance (Jee, 2009). A PP
index I is said affine invariant if I(X) = I(sX+v) for
a nonsingular linear transformation s and a constant
vector v. Thus, affine invariance ensures that changes
in scale and location of the projected data do not affect
the index value. A common approach to insure affine
invariance is sphering the original data matrix X to
have zero mean and identity covariance matrix. This
can be done by the following transformation (Posse,
1995a):
Z = Λ
−1/2
Q(X −E[X]) (2)
where Q and Λ are respectively the eigenvector
and eigenvalue matrices resulting from the eigen-
decomposition of the covariance matrix Σ = QΛQ
T
.
For simplicity, in the rest of the paper we will refer to
the original data matrix X as the sphered version of it.
In clustering applications, entropy is commonly
used as the PP index of the projected data(Jones and
Sibson, 1987). However, the entropy calculation is
computationally intensive, requiring high-order inte-
grals and a density estimator. A simpler and robust al-
ternative to entropy is the Holes PP index (Cook et al.,
1993), which returns comparable (and often better)
results than entropy (Webb-Robertson et al., 2005).
The Holes index is defined for one-dimensional pro-
jection as:
I
Holes
= 1 −
1
n
n
∑
i=1
e
−
1
2
y
2
i
(3)
where y
i
is the projection of the ith data instance x
i
onto the direction of the basis vector a, y
i
= x
i
·a. We
adopt Holes as the PP index to be optimized in all
experiments presented in this paper.
Sequential projection pursuit (SPP) (Guo et al.,
2000) tackles the m-dimensional constrained opti-
mization problem in Equation 1 by converting it into
a sequence of m one-dimensional optimization prob-
lems. The first basis (PP factor) a
1
in A is obtained by
searching (with a GA) a p-dimensional vector of unit
length that maximizes the PP index. Once the first PP
factor a
1
is found, the data set is projected onto it, ob-
taining the score vector y
1
= X ·a
1
. The residual data
is then computed as X = X −y
1
·a
T
1
. The process is
then repeated on this residual data to obtain a
2
, y
2
an
a new residual data, subject to the constraint that a
2
is orthogonal to a
1
. In this way, the predefined m PP
factors are obtained in SPP.
2.2 Genetic Algorithms
Genetic Algorithms (GAs) (Holland, 1975) belong to
a class of algorithms inspired in Darwinian evolution-
ary theory. GAs start from a population of individuals
(potential solutions) normally generated at random.
Each individual is then assigned a fitness value by
means of a fitness function (which encodes the prob-
lem objective function). The algorithm enters to an
evolutionary loop, where each iteration (generation)
produces a new population for the next generation.
In each generation, multiple individuals are stochas-
tically selected from the current population (based on
their fitness) and recombined by a crossover operator
(and possibly randomly mutated by a mutation opera-
tor) to form an offspring population which is inserted
to the current population by a replacement operator.
The GA used in this paper for the evaluation of the
crossover operators encodes the individuals as real-
value unit-length vectors. This representation is used
instead of the binary representation to avoid loss of
precision. Thus, an individual i is a candidate ba-
sis vector a
i
= [a
i1
,a
i2
,. .., a
ip
]
T
to project the data
X·a
i
. The fitness function is the Holes PP index. Sev-
eral crossover operators are tested (Section 3), those
that work over binary strings (single and multi-point
crossover) are naturally extended to our real represen-
tation, maintaining the coefficients of the vectors as
unbreakable units (genes). The selection operator is
implemented as tournament selection: we randomly
choose ts individuals (the tournament size) from the
current population (of size w) and return the best indi-
vidual. With this selection method, w/2 pairs of dif-
ferent individuals are selected to form the mating pool
for crossover. For each pair of this mating pool a uni-
form random number is generated in the unit interval,
if such number is less than a predefined number cr
(crossover rate parameter) the crossover is performed
and two new offspring are generated, otherwise the
offspring are clones of the parents. Mutation is no
used in the present study in order to no obscure the
influence of the studied crossover operators. Replace-
ment is carried out by selecting the best w individuals
of the joint population of parents and offspring.
3 CROSSOVER OPERATORS
Eight crossover operators are presented here, three
commonly used in the literature: arithmetic, single
and multi-point crossover and five new proposed for
this paper: one extension of the arithmetic crossover,
two hyperconic crossovers and two fitness-biased
crossovers. All operators require two parent individu-
als as input and return two offspring as output. Parent
individuals are denoted by a1 = [a1
1
,. .., a1
p
]
T
and
a2 = [a2
1
,. .., a2
p
]
T
and the offspring individuals by
b1 = [b1
1
,. .., b1
p
]
T
and b2 = [b2
1
,. .., b2
p
]
T
. The
ON THE CROSSOVER OPERATOR FOR GA-BASED OPTIMIZERS IN SEQUENTIAL PROJECTION PURSUIT
95

function Normalize(x) produces a unit vector in the
direction of x, thus, Normalize(x) = x/
√
x
T
·x. This
operation is performed in all crossover operator in
order to maintain constant the scale of the projection.
Crossover1 (Arithmetic Inner Crossover). This op-
erator was adopted in PPEA (Chiang et al., 2001).
The offspring are produced as follow:
b1 = Normalize(ra1 + (1 −r)a2)
b2 = Normalize((1 −r)a1 + ra2) (4)
where r is a uniform random number from [0,0.5].
The offspring vectors are contained in the plane of
the parents and located symmetrically in both sides
of the bisectrix of the parents and limited by them.
Crossover 2 (Arithmetic Inner-outer Crossover).
This operator is proposed here as an extension of
Crossover1. The offspring are produced in the same
way as in Equation 4. The only difference is in the
random number r, which is generated uniformly in
the interval [−0.5,0.5] . Thus the offspring vectors
are contained in the plane of the parents and located
symmetrically in both sides of the bisectrix of the
parents. By contrast with Crossover1, the offspring
can be outside of the region delimited by the parents
forming a maximum angle with respect to the bisec-
trix of up to 2θ, being θ the angle between any parent
and the bisectrix.
Crossover3 (Single-point Crossover). This is a tra-
ditional operator in the GA that has been formulated
to recombine binary strings. We implement here a
real version of this operator. First, a random position
r is chosen uniformly from the set {1, 2,..., p −1}.
Next, the offspring are created as follow:
b1 = Normalize([a1
1
,. .., a1
r
,a2
r+1
,. .., a2
p
]
T
)
b2 = Normalize([a2
1
,. .., a2
r
,a1
r+1
,. .., a1
p
]
T
) (5)
Crossover4 (Multi-point Crossover). This operator
can be viewed as an extension of Crossover3. First, a
random binary vectors (mask) of length p is created
with similar numbers of 0s and 1s. Next, the offspring
b1 is created by placing the corresponding values
of a1 in the positions where the mask is 1 and the
values of a2 in the other positions. b2 is created in a
complementary way, i.e., b2 has the values of a2 in
the positions where the mask is 1 and the values of
a1 in other positions.
Crossover5 (Inner Hypercone Crossover). We
propose this operator to allow the offspring to be
outside the plane of the parents. The offspring
can be located inside the hypercone resulting from
rotating the parents around their bisectrix and sym-
metric to it. First, the bisectrix is calculated as
m = Normalize(a1 + a2). Next, a plane of crossover
is selected containing such bisectrix. Therefore, one
of the basis of that plane is the same bisectrix. The
other base v is a vector orthogonal to it that can
be constructed by randomly choosing one non-zero
component of m, m
j
, and one position l 6= j; with
this, the orthogonal vector is composed as: v
i
= 0
(i 6= j,l), v
l
= 1, and v
j
= −m
l
/m
j
. The basis of the
plane of crossover are then Q = [m,v]. In this plane,
the bisectrix is over the abscissa and the parents are
located at angles θ and −θ. Offspring b1
Q
is chosen
in polar coordinates in this plane as: e
θ
r
, where θ
r
is uniformly selected from [0, θ]. Offspring b2
Q
is
symmetric to offspring b1
Q
, thus b2
Q
= e
−θ
r
. The
offspring in the original space are recovered with the
plane basis as: bi = Q ·bi
Q
, i = 1, 2. In this crossover
scheme there are up to p(p − 1) different planes
where the crossover can take place, all intersecting at
the parent bisectrix.
Crossover6 (Inner-outer Hypercone Crossover).
This operator is proposed here as an extension of
Crossover5. Like such operator, the offspring can
be in one of the p(p −1) possible crossover planes
symmetric to the bisectrix of the parents. By contrast
with Crossover5, the offspring are allowed to be
outside the hypercone generated by rotating the
parents around their bisectrix. The procedure to
produce the offspring is similar to Crossover 5. The
only difference is the interval where θ
r
is sampled,
which is [0,2θ]. Consequently, the offspring can
born in a wider hypercone than that of Crossover5,
containing this later.
Crossover7 (Fitness-biased Inner Crossover). We
propose this operator to guide the creation of the off-
spring by the fitness of the parents. The crossover
takes place in the plane of the parents, as Crossover 1
and Crossover 2. By contrast with them, the offspring
are no more symmetric to the bisectrix of the parents.
The basis vector in the plane are chosen so that the
parent with more fitness forms a negative angle with
respect to the abscissa. Let denote a
best
the parent
with best fitness and a
worst
the other parent. The ba-
sis vectors in the plane are Q = [m,v], where m is
the bisectrix and v is computed as Normalize(a
worst
−
(a
T
worst
·m)m). In this plane, the bisectrix is over the
abscissa and the parents are located at angles −θ (the
best parent) and θ (the worst parent). A uniform ran-
dom angle θ
r
is sampled from the interval [−θ,θ].
Then, this angle is distorted (in favor to −θ) with the
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
96

following function:
θ
(biased)
r
= 2θ((θ
r
+ θ)/2θ)
β
−θ (6)
where β > 1 controls the amount of dis-
tortion. In our experiments we use β =
(Fitness(a
best
)/Fitness(a
worst
))
4
. The function
in Equation 6 produces an angle in the same interval
[−θ,θ]. With θ
(biased)
r
computed, the first offspring
b1 is constructed as explained in Crossover 5. The
offspring b2 is produced similarly choosing another
θ
r
.
Crossover8 (Fitness-biased Inner-outer
Crossover). This operator is proposed here as
an extension of Crossover7 (like Crossover2 extends
Crossover1). The procedure is similar to Crossover7.
The only difference is in the interval from which θ
r
(and therefore θ
(biased)
r
) is sampled. This interval is
[−2θ,2θ]. Thus the offspring vectors are contained
in the plane of the parents, with the tendency to fall
closer to the best parent, both on its left and right
sides.
4 EXPERIMENTAL STUDY
4.1 Datasets
Four public datasets were selected for our study from
the UCI repository (Frank and Asuncion, 2010). The
selection was performed trying to have a collection of
datasets with increasing number of features (almost
geometric increase) to analyze the influence of the in-
creasing dimension over the crossover operators.
Wine Dataset. This dataset is known as the Wine
recognition data. The data are the results of a
chemical analysis of samples of three types of
wines in Italy. The dataset consist of 178 in-
stances and 13 continuous features (constituents
found for each wine).
WDBC Dataset. This dataset is known as the Wis-
consin Diagnostic Breast Cancer. Each data
sample describe characteristics of the cell nuclei
present in a digitized image of fine needle aspi-
rate of breast mass. The dataset consist of 569 in-
stances and 30 real-valued features that describe
characteristics of the cell nuclei present in the im-
age.
Sonar Dataset. This dataset content features ex-
tracted from bouncing of sonar signals collected
from metal cylinders and cylindrically-shaped
rocks positioned on a sandy ocean floor. The
dataset consist of 208 instances and 60 real-valued
attributes. Each attribute represents the energy
within a particular frequency band integrated over
a period of time.
Musk Dataset. In this dataset are stored features that
represent different conformations of molecules
that are judged by human experts. The dataset
consist of 476 instances and 166 attributes labeled
according to whether or not they contain a musk
odor.
4.2 Evaluation
The performance of the different crossover operators
are evaluated in the prototypical GA described in Sub-
section 2.2. Three hundred replicates are performed
for each dataset to obtain consistent statistics. Figure
1 depicts a replicate, which consists in: 1) generate an
initial random population by choosing w = 10p ran-
dom vectors from R
p
and normalizing them to be unit
length vectors; 2) starting from this initial population,
evolve two instance of the GA for each crossover op-
erator: one for ts = 1% of the population and one for
ts = 5% of the population (in total 16 GA instances
are evolved per replicate); 3) record the following
statistics for every GA instance: the mean fitness of
the evolving population at 20 generations, the mean
fitness of the evolving population at 200 generations,
and the mean fitness and number of generations when
the population reaches convergence. We consider that
a population has converged when the difference be-
tween the maximum and mean fitness of the popula-
tion is less than 1e
−7
. In some cases convergence is
achieved before 200 generations; there, the GA is kept
running to reach 200 generations. Otherwise, the al-
gorithm is stopped as soon as convergence is reached.
If convergence is not achieved in a maximum of 5000
generations, the GA instance is stopped anyway. In
all cases the crossover rate is set to 1 and the muta-
tion is disabled. This implies that the couples in the
mating pool always produce their offspring by cross-
ing over. The recorded statistics are averaged over the
300 replicates in each dataset.
Figure 1: Example of replicate executed to get statistics of
the performance of the crossover operators.
ON THE CROSSOVER OPERATOR FOR GA-BASED OPTIMIZERS IN SEQUENTIAL PROJECTION PURSUIT
97

(a) Wine dataset.
(b) WDBC dataset.
(c) Sonar dataset.
(d) Musk dataset.
Figure 2: Results for the mean fitness (curves) and num-
ber of generations (bars) at convergence (averaged over 300
replicates). The left scale is for the number of generations
and the right scale is for the fitness values (Holes PP index).
With this experimental setup we try to measure the
contribution of the crossover operator on the perfor-
mance of the GA. For a same replicate and tourna-
ment size, all GA instances start from the same pop-
ulation, so the only influential factor on the GA per-
formance is the crossover operator. One of the per-
formance measures is the mean fitness of the popu-
lation at different stages of evolution. This will tell
us which operators would be more appropriate if we
have a time frame to get the answer. The other per-
formance measures are the maximum achievable fit-
ness and the number of generations needed to reach
it. With these measures, we are enabled to infer the
exploratory capabilities of the operators and their effi-
ciencies. Also important, the analysis of the crossover
operators at different selective pressure levels (de-
fined by the tournament size) is useful, since the be-
havior of the crossover operator can be affected by
this factor.
5 RESULTS
Figure 2 shows the results of the average values of
fitness and number of generations at convergence for
the different crossover operators and tournament sizes
analyzed. Each subfigure corresponds to a differ-
ent dataset. With respect to the number of gener-
ations needed to converge, a similar pattern can be
seen for all datasets and tournament sizes: Crossover6
has the highest value and clearly differentiated from
the others; Crossover4 has the second highest val-
ues; Crossover1 and Crossover7 have almost identical
values, which are the lowest values of all operators;
Crossover2 and Crossover8 have also matching val-
ues, which are the second lowest values; Crossover3
and Crossover5 have mixed values, with Crossover3
surpassing Crossover5 only when ts = 1% in all but
Musk dataset. These results can be also visualized
in Figure 3, which shows the mean number of gen-
erations of convergence as a function of the dataset
dimension for the two tournament sizes. It can be
seen two groups of operators with different trend with
respect to the dimension, independent of the tourna-
ment size. The first group, integrated by Crossover1,
Crossover2, Crossover3, Crossover7 and Crossover8,
shows a decrease in the number of generations for
convergence as the dimensionality is increased. The
second group, formed by Crossover4, Crossover5 and
Crossover6, shows an increase in the number of gen-
erations for convergence as the dataset dimension
is increased, with Crossover6 having the fastest in-
crease. When the tournament size is varied from ts =
1% to ts = 5%, the number of generations for con-
vergence decreases for all crossovers operators and
datasets (also observed in Figure 2), but the general
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
98
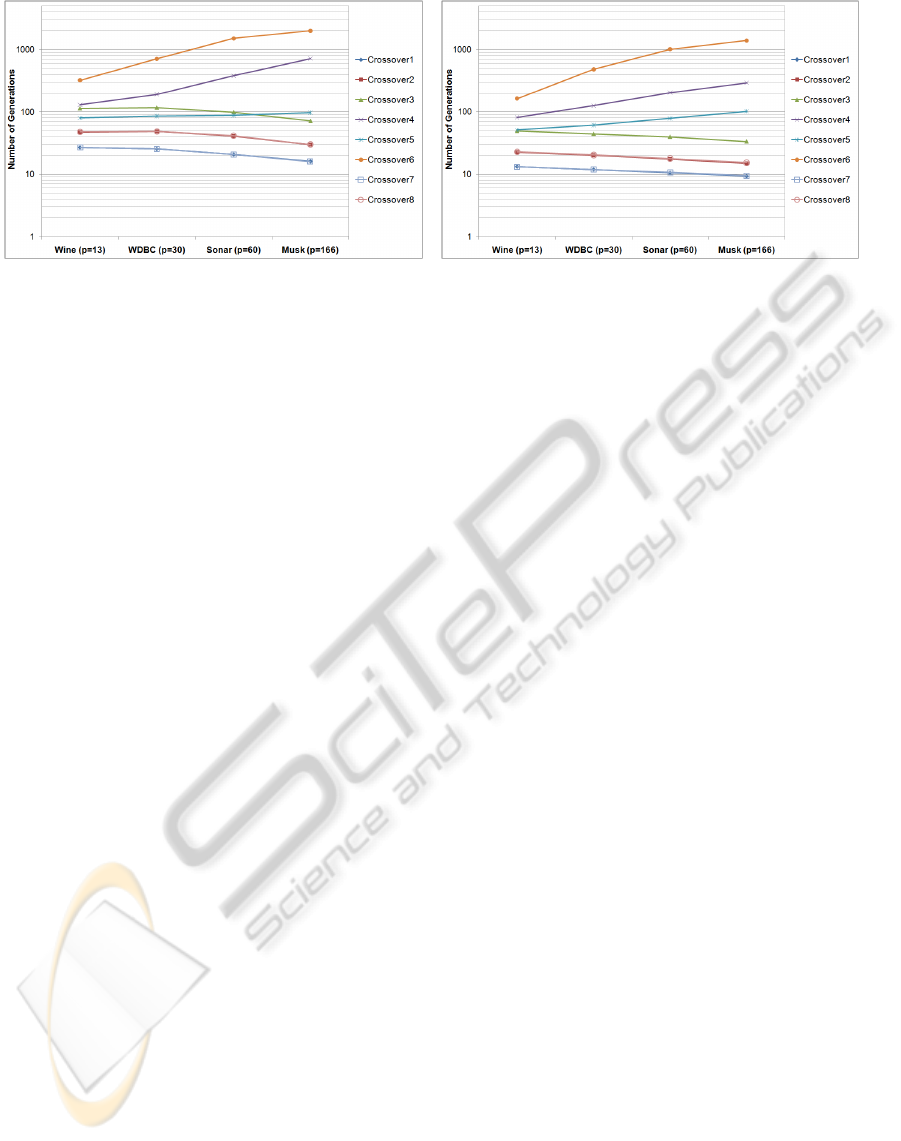
(a) ts = 1%. (b) ts = 5%.
Figure 3: Plot of the number of generations needed for convergence (averaged over 300 replicates) with respect to the dataset
(ordered according to its dimension) for two selective pressure. The scale is logarithmic to visualize differences.
behavior of the number of generations vs. dimension-
ality is unchanged.
With respect to the fitness of the converged so-
lutions, we can observe in Figure 2 that the fitness
values achieved with the different crossover operators
in all datasets are negatively affected by the increase
of the tournament size from 1% to 5%. Crossover5
and Crossover6 are the least affected operators to this
change, with Crossover6 being almost insensitive. In
addition, Crossover6 converged to solutions with bet-
ter fitness than the other operators, being this behavior
more pronounced on datasets of higher dimensional-
ities (Sonar and Musk). Crossover4 presents the sec-
ond highest values in its converged solutions when
ts = 1%. When ts = 5%, the solutions produced by
Crossover4 are slightly surpassed by those produced
by Crossover5 in higher dimensionalities. Crossover3
has the next best fitness values, closely followed by
Crossover8. Crossover1, Crossover2 and Crossover7
produce similar solutions with the lowest fitness val-
ues.
Figure 4 shows for each dataset the mean fitness
of the evolving population at 20 and 200 genera-
tions for ts = 1%. At both number of generations, it
can be observed an interesting difference between the
datasets with low dimensions (Wine and WDBC) and
the datasets with higher dimensions. In the first group
of datasets, Crossover4 and Crossover6 are very com-
petitive in fitness, generating the highest values of all
operators. Crossover5 is also competitive at 20 gen-
erations in such datasets, but unlike Crossover4 and
Crossover6, it quickly reaches its maximum, mak-
ing a poor improvement of the fitness from 20 to
200 generations. In the datasets with higher dimen-
sionalities (Sonar and Musk), Crossover6 presents a
clear superiority to the others operators at both num-
ber of generations sampled. At 200 generations in
those datasets, Crossover4 continues to be the sec-
ond best operator in producing high-fitness solutions,
but when the number of generations is lowered to
20 it is overcome by Crossover5. Crossover3 and
Crossover8 produce the next best solutions in all
datasets, with Crossover3 having a better fitness en-
hancement with the increment of the number of gener-
ations. Crossover1, Crossover2 and Crossover7 pro-
duce the lowest-fitness solutions in all datasets, re-
gardless the number of generations. They present an
irrelevant increment of the mean fitness going from 20
to 200 generations. In addition, Crossover(1,2,3,7,8)
tend to find solutions of similar fitness as the dataset
dimension is increased.
6 DISCUSSION
From the above results, it is clear that the performance
of the analyzed crossover operators is affected by the
dimension of the original data and the selective pres-
sure used to evolve the GA. Based on the fitness of the
converged solution, it can be inferred that producing
the offspring somewhere in the hypercone around the
bisectrix of the parents (Crossover(5,6)) improves the
idea of producing the offspring only in the plane of the
parents (as Crossover(1,2,7,8)), giving an increased
exploratory power to the GA. This strengthening of
the search power is even more remarkable if the off-
spring is allowed to born outside the hypercone of the
parents (generated by rotating them around their bi-
sectrix), as Crossover6. The negligible sensitivity of
Crossover(5,6) to the change of the selective pressure
can also be explained by their good exploratory prop-
erties, since they produce offspring in a wider space,
being less prone to converge to the first local opti-
mum they found as the selective pressure is increased.
The drawback of the hyper-conical operators, espe-
cially Crossover6, is the high number of generations
ON THE CROSSOVER OPERATOR FOR GA-BASED OPTIMIZERS IN SEQUENTIAL PROJECTION PURSUIT
99
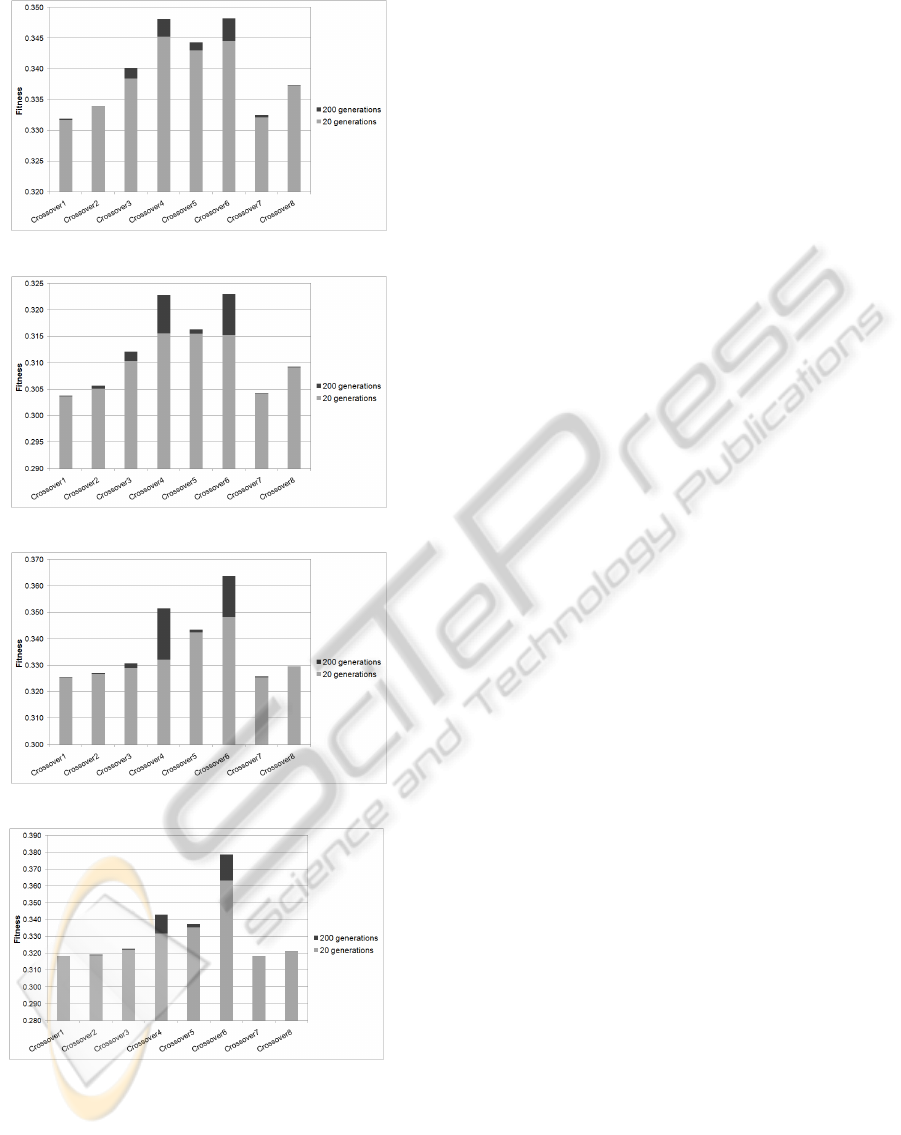
(a) Wine dataset.
(b) WDBC dataset.
(c) Sonar dataset.
(d) Musk dataset.
Figure 4: Results for the mean fitness of the evolving popu-
lations (averaged over 300 replicates) at 20 and 200 gener-
ations.
needed to converge, which rapidly grows with the di-
mension of the data. However, if the convergence cri-
terion is a fixed number of generations, Crossover6
gives solutions with competitive fitness, outperform-
ing considerably the other operators in high dimen-
sional datasets.
The idea of recombining the parents by transfer-
ring some coordinates of one parent and the rest of
coordinates of the other parent, as in Crossover(3,4),
proved also to be effective for the purpose of PP factor
optimization. It was found that transferring the coor-
dinates as independent units (Crossover4) gives more
search performance than transferring the coordinates
in blocks, as in Crossover3. Unlike Crossover(5,6),
the search performance of these operators is notice-
ably degraded by the increase of the selective pres-
sure. This suggests that such operators heavily rely on
the diversity of the population (given by low selective
pressure) to produce better results. The average num-
ber of generations to achieve convergence is also con-
siderable in Crossover4 (is the second highest after
Crossover6) and, as Crossover6, it grows quickly with
the dimension of the data. For a fixed number of gen-
erations and in low-dimensional datasets Crossover4
is as competitive as Crossover6 in fitness of the solu-
tions. But in high dimensions it performs worse.
The proposal of biasing the production of the
offspring by the fitness of the parents, as in
Crossover(7,8), proved to be not as effective as the
production of the offspring inside (or outside) the
hypercone of the parents. However, some gain is
obtained in fitness with almost the same number of
generations of convergence of their non-biased ver-
sions (Crossover(1,2)). The number of generations to
achieve convergence with these non-hyperconic oper-
ators (Crossover(1,2,7,8)) is very low in all datasets
and decrease slightly with the dimension of the data.
This behavior could be explained by the fact that the
dimension of the space where the offspring are gener-
ated (the plane of the parents) does not grow with the
dimension of the data (as in the other operators), so
such space is more and more restrictive as the dimen-
sion increases, turning them more prone to find local
optima.
Based on the above findings we can infer some
guidelines to select the crossover operator for a GA
as optimizer of PP factors. First, if we have a fixed
time frame to get the answer and the dataset has a low
dimension (as Wine or WDBC), it would be more ad-
visable to choose Crossover4 with low selective pres-
sure (1% of the population size) or Crossover6 with
low to moderate selective pressure (1-5% of the pop-
ulation size). Second, if we have a fixed time frame
for the answer but the dataset has moderate to high
dimension (as Sonar or Musk), the most appropriate
option would be Crossover6. Third, if the time is not a
constraint and the dataset has low dimension, the best
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
100

options to consider would be Crossover4 with low se-
lective pressure or Crossover(5,6) with moderate se-
lective pressure. Finally, if the time is not a constraint
and the dataset is high-dimensional, the best option to
consider would be Crossover6 with moderate selec-
tive pressure.
7 CONCLUSIONS
Sequential Projection Pursuit - SPP is a useful
method to find interesting linear projections of multi-
dimensional data. The main problem in SPP is the op-
timization of the PP index function, which measures
how interesting the projection is. Genetic algorithms
are promising optimizer of SPP, but their success is
dependent on the selection of their genetic operators.
One of the most important operators is the crossover,
which is responsible for the rapid exchange of useful
information among solutions. This article addressed
the problem of which crossover to choose in the de-
sign of a GA-based optimizer for SPP. An experimen-
tal study was presented, comparing the performance
of eight crossover operators: three available in litera-
ture (arithmetic crossover and single and multi-point
crossover) and five new proposed here (one single ex-
tension of the arithmetic crossover, two hyperconic
crossovers and two fitness-biased crossovers). The
study was carried out over four public datasets of
increasing dimension. The results showed that one
of the proposed hyperconic operators tends to find
projections with higher fitness than the other oper-
ators, clearly excelling in higher dimensions. This
interesting performance was also observed at differ-
ent stages of evolution. The multipoint crossover op-
erator presented the second best performance in fit-
ness, being competitive with the hyperconic operator
in low dimensional datasets. The final selection of
the crossover operator is dependent on the precision
required, the dimension of the dataset and the tolera-
ble time to get the answer. Some guidelines to select
the most appropriate operator for each situation were
presented.
This study is an important step towards the de-
sign of efficient GA-optimizers for SPP. We are cur-
rently investigating other PP indices and the influ-
ence of mutation on the performance of the pre-
sented crossover operators. Also, different evolution-
ary strategies are being studied to take advantage of
the features of the proposed operators.
ACKNOWLEDGEMENTS
The authors acknowledge the CAPES/ PEC-PG -
Brazil for the scholarship granted to the first author
of this article.
REFERENCES
Berro, A., Marie-Sainte, S. L., and Ruiz-Gazen, A. (2010).
Genetic algorithms and particle swarm optimization
for exploratory projection pursuit. Annals of Math-
ematics and Artificial Intelligence, 60(1-2, SI):153–
178.
Bolton, R. and Krzanowski, W. (2003). Projection pursuit
clustering for exploratory data analysis. Journal of
Computational and Graphical Statistics, 12(1):121–
142.
Chiang, S.-S., Chang, C.-I., and Ginsberg, I. (2001). Unsu-
pervised target detection in hyperspectral images us-
ing projection pursuit. Geoscience and Remote Sens-
ing, IEEE Transactions on, 39(7):1380 –1391.
Cook, D., Buja, A., and Cabrera, J. (1993). Projection
pursuit indexes based on orthonormal function ex-
pansions. Journal of Computational and Graphical
Statistics, 2(3):225–250.
Daszykowski, M., Kaczmarek, K., Heyden, Y. V., and Wal-
czak, B. (2007). Robust statistics in data analysis - a
review: Basic concepts. Chemometrics and Intelligent
Laboratory Systems, 85(2):203– 219.
Demirci, O., Clark, V. P., and Calhoun, V. D. (2008). A pro-
jection pursuit algorithm to classify individuals using
fMRI data: Application to schizophrenia. Neuroim-
age, 39(4):1774–1782.
Frank, A. and Asuncion, A. (2010). UCI machine learning
repository.
Friedman, J. H. (1987). Exploratory projection pursuit.
American Statistical Association, 82(397):249–266.
Friedman, J. H. and Tukey, J. W. (1974). A projection
pursuit algorithm for exploratory data analysis. IEEE
Trans. Comput., 23(9):881–890.
Guo, Q., Wu, W., Massart, D., Boucon, C., and de Jong,
S. (2001). Feature selection in sequential projection
pursuit. Analytica Chimica Acta, 446(1-2):85–96.
Guo, Q., Wu, W., Questier, F., Massart, D., Boucon, C., and
de Jong, S. (2000). Sequential projection pursuit using
genetic algorithms for data mining of analytical data.
Analytical Chemestry, 72(13):2846–2855.
Holland, J. H. (1975). Adaptation in Natural and Artificial
Systems. University of Michigan Press, Ann Arbor,
MI, USA.
Huber, P. J. (1985). Projection pursuit. Annals of Statistics,
13(2):435–475.
Jee, J. R. (2009). Projection pursuit. Wiley Interdisciplinary
Reviews: Computational Statistics, 1(2):208–215.
Jones, M. C. and Sibson, R. (1987). What is projection pur-
suit? Journal of the Royal Statistical Society. Series A
(General), 150(1):pp. 1–37.
ON THE CROSSOVER OPERATOR FOR GA-BASED OPTIMIZERS IN SEQUENTIAL PROJECTION PURSUIT
101

Kruskal, J. (1969). Toward a practical method which helps
uncover the structure of a set of multivariate observa-
tions by finding the linear transformation which opti-
mizes a new ’index of condensation’. Statistical Com-
putation, pages 427–440.
Lee, E., Cook, D., Klinke, S., and Lumley, T. (2005). Pro-
jection pursuit for exploratory supervised classifica-
tion. Journal of Computational and Graphical Statis-
tics, 14(4):831–846.
Nason, G. (1995). Three-dimensional projection pursuit. J.
Royal Statistical Society, Series C, 44:411–430.
Pena, D. and Prieto, F. (2001). Cluster identification using
projections. Journal of the American Statistical Asso-
ciation, 96(456):1433–1445. 160th Annual Meeting
of the American-Statistical-Association, BOSTON,
MASSACHUSETTS, FEB, 2000.
Posse, C. (1990). An Effective 2-dimensional Projec-
tion Pursuit algorithm. Communications in Statistics-
Simulation and Computation, 19(4):1143–1164.
Posse, C. (1995a). Projection pursuit exploratory data anal-
ysis. Computational Statistics and Data Analysis,
20:669–687.
Posse, C. (1995b). Tools for two-dimensional exploratory
projection pursuit. Computational and Graphical
Statistics, 4(2):83–100.
Ren, Y., Liu, H., Yao, X., and Liu, M. (2007). Prediction
of ozone tropospheric degradation rate constants by
projection pursuit regression. Analytica Chimica Acta,
589(1):150–158.
Rodriguez-Martinez, E., Goulermas, J. Y., Mu, T., and
Ralph, J. F. (2010). Automatic induction of projection
pursuit indices. IEEE Transactions on Neural Net-
works, 21(8):1281–1295.
Srinivas, M. and Patnaik, L. (1994). Genetic Algorithms -
A Survey. Computer, 27(6):17–26.
Webb-Robertson, B. J. M., Jarman, K. H., Harvey, S. D.,
Posse, C., and Wright, B. W. (2005). An improved
optimization algorithm and bayes factor termination
criterion for sequential projection pursuit. Chemomet-
rics and Intelligent Laboratory Systems, 77(1-2):149–
160.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
102
