
USER INDEPENDENT SYSTEM FOR RECOGNITION OF HAND
POSTURES USED IN SIGN LANGUAGE
Dahmani Djamila, Benchikh Soumia and Slimane Larabi
LRIA, Computer Science Department, University of Science and Technology Houari-Boumedienne,
BP32 El-Alia, Algiers, Algeria
Keywords: Hand posture recognition, Moments, Shape, Sign language.
Abstract: A new signer independent method of recognition of hand postures of sign language alphabet is presented in
this paper. We propose a new geometric hand postures features derived from the convex hull enclosing the
hand’s shape. These features are combined with the discrete orthogonal Tchebichef moments, and the Hu
moments. The Tchebichef moments are applied on the external and internal edges of the hand’s shape.
Experiments, based on two different hand posture data sets, show that our method is robust at recognizing
hand postures independent of the person performing them. The system obtains a good recognition rates, and
also performs well compared to other hand user independent posture recognition systems.
1 INTRODUCTION
The most important way of communication in the
deaf community is the sign language. The goal of
the sign language recognition is to transcribe
automatically the gestures of the sign language into
significant text or speech. The sign language is a
collection of gestures, movements, postures, and
facial expressions corresponding to letters and words
in natural languages. The works in automatic Sign
Language Recognition (SLR) research has
happening about twenty years ago particularly for
American (Starner and Pentland, 1996), and
Australian (Kadous, 1996). Since lot of systems
have been developed for different sign languages
including: Arabic sign language (Al-Jarrah and
Halawani, 2001), French sign language (Aran et al.,
2009). German sign language (Dreuw et al., 2008)
Sign language recognition (SLR) can be classed
into isolated SLR and continuous SLR and each can
be further classified into signer-dependent and
signer-independent systems. These systems can be
divided into major classes. The first class relies on
electromechanical devices that are used to measure
the different gesture parameters. Such systems are
called glove based systems. These systems have
disadvantages to be complicated and less natural.
The second class exploits machine vision and
processing techniques to create visual based hand
gesture and posture recognition systems. This
second class is the class of vision based systems. A
variety of methods and algorithms has been used for
solving the problem of SLR, include distance
classifiers, template matching, conditional random
field model (CRF) dynamic time warping model
(DTW), Bayesian network, neural networks, fuzzy
neural networks, Hidden Markov models, geometric
moments, Discrete Cosine Transformation (DCT).
Size functions.
However, the accuracy of most methods treating
the problem of hand posture recognition depends on
the training data set of the system used. Most
performance measures where results of signer
dependent experiments are carried out by testing the
system on subjects that were also used to train the
system. This is due to the anatomic particularity of
each person. An ideal system of hand posture
recognition should be able to give a good
recognition separately from the training data set.
Consequently, several user independent hand
posture recognition systems were developed. Most
of these systems perform their training data with
different subjects from the subjects of the test data:
In (Al-Roussan and Hussain, 2001) the authors
developed a system to recognize isolated signs for
28 alphabets from Arabic sign language (Arsl) using
colored gloves for data collection and adaptive
neuro-fuzzy inference systems (ANTFS) method. A
Recognition rate of 88%was achieved. Later, and on
a similar work the recognition rate increased to
93.41 using polynomial networks (Assalaeh and Al-
Roussan, 2005). (Treisch and Von der Malsburg,
2002) proposed a method using elastic graph
581
Djamila D., Soumia B. and Larabi S. (2012).
USER INDEPENDENT SYSTEM FOR RECOGNITION OF HAND POSTURES USED IN SIGN LANGUAGE.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 581-584
DOI: 10.5220/0003785005810584
Copyright
c
SciTePress
matching with a recognition rate of 92.9% for
classifying 10 hand postures. (Kelly et al., 2010)
proposed a user independent system of hand posture
recognition based on the use of weighted eigenspace
size functions, the method achieved a recognition
rate of 93.5 tested on Treisch data set.
This paper proposes a Recognition system for
static sign language alphabets. The system is user
independent and uses no gloves or any other
instrumented devices. We propose a new hand
posture features extracted from the convex hull
enclosing the hand’s shape. These features are
combined with the discrete orthogonal Tchebichef
moments and the geometric Hu moments. The
experiments are based on two separate data sets. The
system obtains a good recognition rate for all data
sets.
2 PROPOSED APPROACH
The proposed system is designed to recognize static
signs of sign language alphabets. The Figure1 shows
the block diagram of the proposed recognition
system.
2.1 Preprocessing
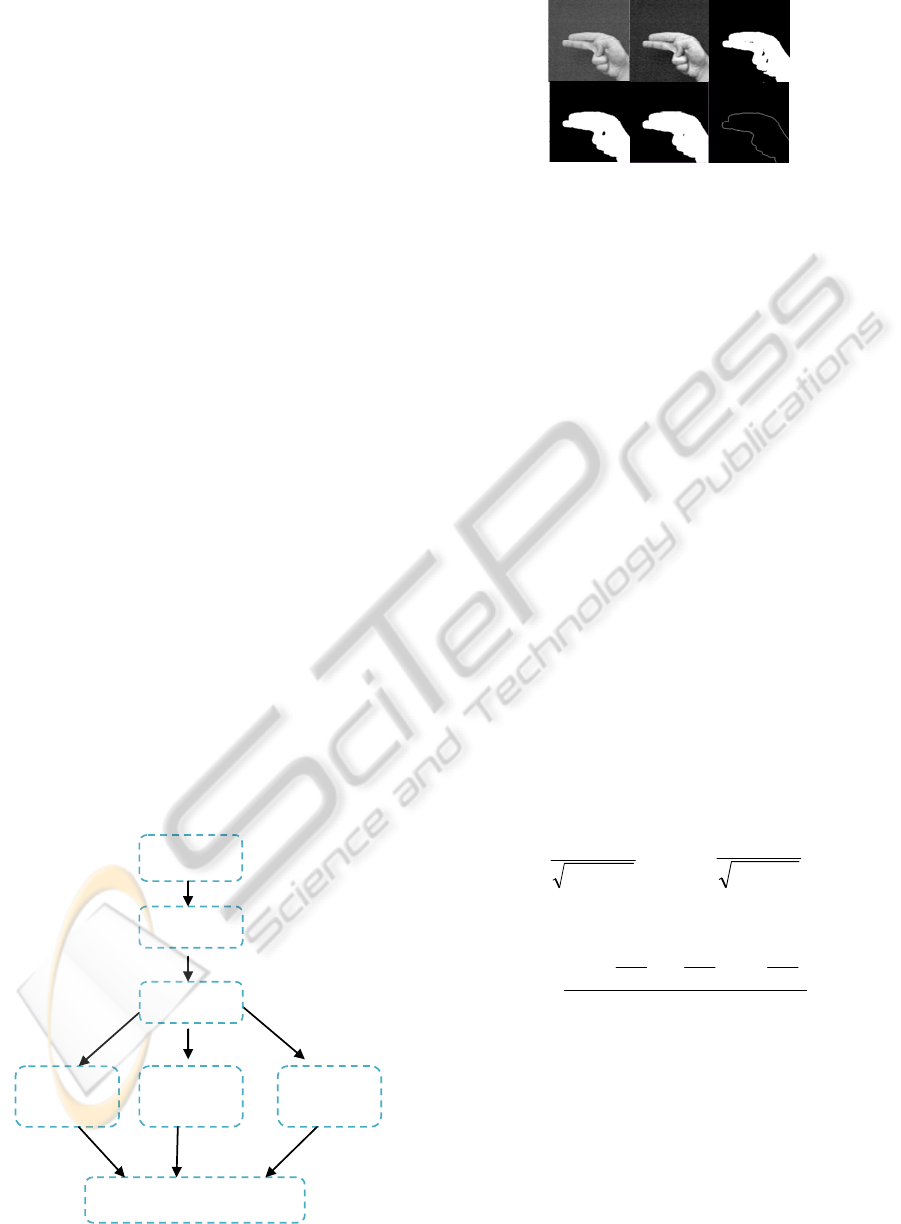
To extract the external contour of the images, we
followed these steps at first the image segmentation
is carried out using the global threshold filter, after
the morphological operations (erosion and dilation)
are applied to the image and finally using the region
of the hand gesture we extract the external hand
contour. As we can see in the Figure2.
The internal and external detection process is
performed using the adaptive threshold filter.
Parallel combination with the majority vote
Geometric features
classification
Hu moments
classification
Tchebichef
moments
classification
Features Extraction
Preprocessing
Image acquisition
Figure 1: Proposed system.
Figure 2: Example of contour extraction from G from
Treisch data set.
2.2 Features Extraction
In the proposed approach, three types of the feature
vectors are computed, the orthogonal Tchebichef
moments calculated from the internal and external
edges of the hand, the geometrical features vectors,
and the statistical features in this Hu moments
calculated the external hand contour.
2.2.1 The Tchebichef Orthogonal Moments
Orthogonal moments are good signal descriptors
with their low order components are sufficient to
provide discriminant power in pattern or object
recognition.
The discrete Tchebichef moments
pq
T
of order
()
qp +
of
()
NM ×
discrete space image are defined
as in (Mukundan et al., 2001):
pq
T
),()(
~
)(
~
1
0
1
0
yxfytxt
q
M
x
N
y
p
∑∑
−
=
−
=
=
(1)
Where
)(
~
xt
p
and
)(
~
yt
q
are the normalized
Tchebichef polynomials defined as
),(
~
)(
)(
~
Mp
xt
xt
p
p
ρ
=
;
),(
~
)(
)(
~
Nq
yt
yt
q
q
ρ
=
(2)
With
12
)1)...(
2
1)(
1
1(
),(
~
2
2
2
2
2
+
−−−
=
p
M
p
MM
M
M
ρρ
(3)
The discrete Tchebichef polynomials
)(xt
p
can be
found in (Erdelyi et al., 1953).
2.2.2 The Geometric Features Vectors
To describe hand posture we propose some
geometric features using the convex hull enclosing
the hand shape. This geometric feature set contains
three features:
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
582

1) The Relative Area
The relative area represents the ratio between the
area of the hand shape and the area of the convex
hull. It is defined as:
hull
shape
Area Re
Convex
hand
Area
Area
l =
(4)
2) The Relative Minimum Distance
This feature is defined as:
Lg
D
l
min
min
D Re =
(5)
Where
min
D represents the distance between the
center of gravity of the hand and the point
min
P
.The
point
min
P is the closest vertex of the convex hull
from the center of gravity of the hand, and
Lg the
length of the bounding box enclosing the hand
shape.
3) The relative Maximum Distance
This feature is defined as:
Lg
D
l
max
max
D Re =
(6)
Where
max
D represents the distance between the
center of gravity of the hand and the point
max
p .
The point
max
p is the furthest vertex of the convex
hull from the center of gravity of the hand.
The Figure 3 illustrates this features.
:
The bounding box.
:
The convex hull.
:
The center of gravity of the
hand
.
:
The point
min
P
.
:
The point
max
p
.
Figure 3: Illustration of the geometric features.
2.2.3 Hu Moments
Hu moments (Hu, 1962), which are a reformulation
of the non-orthogonal centralized moments, are a set
of transition, scale, and rotation invariant moments.
3 DATA COLLECTION
We evaluate our techniques using two separate data
sets.
3.1 Arabic Sign Language Database
The data set consists of 30 hand signs from the
Arabic sign language (Arsl) alphabet.
The hand postures were performed by 24
different subjects against uniform background and
with different scaling.
3.2 Jochen-Treisch Static Hand
Postures Database
The second data set is a benchmark database called
the Jochen-Treisch static hand postures database
(Treisch and Von Der Malsburg, 2002). The system
proposed was tested on hand images with dark and
light backgrounds.
4 EXPERIMENTAL RESULTS
The classification of the hand postures is performed
using the parallel combination with the majority
vote. The Table1 presents the performance of the
system for the Treisch data set with the scenario of
(Just et al., 2006) 8 subjects for training dataset and
16 subjects for the test dataset with light and dark
background respectively.
Table 1: Classification performance for the Treisch
database (light and dark background).
Backgrounds Recognition rate
Light background 97,5%
Dark background 88,6%
Global recognition rate 93.1
The classification of Arsl sign language
alphabets achieved a recognition rate of 94.67%,
with the scenario of 4 subjects for training data set
and 20 subjects for the test data set. The result
obtained by the proposed system performs well
knowing that the best recognition rate obtained until
now in Arabic sign language alphabet is equal to
93,41 (Assaalaeh and Al-Roussan, 2005), and the
system developed used colored gloves.
5 CONCLUSIONS
In this paper we present a new signer independent
USER INDEPENDENT SYSTEM FOR RECOGNITION OF HAND POSTURES USED IN SIGN LANGUAGE
583

system of hand postures recognition. It is a vision
based system that uses no glove or any other
devices. The method is based on the use of
geometrical and statistical features. The system
proposed performs well in the classification of hand
postures from the Arabic sign language alphabets.
A recognition rate of 94.67% was achieved. We
showed good performance of our system on the
benchmark Treisch hand postures database.
REFERENCES
Al-Jarrah, O., Halawani, A., 2001. Recognition of gestures
in Arabic sign language using neuro-fuzzy systems.
Artif. Intell. 133 (1-2), 117-138. ISSN 0004-3702.
Al-Roussan, M., Hussain M., 2001 Automatic Recognition
of Arabic Sign Language Finger spelling. In
International Journal of computers and their
applications (IJCA). Special issue on Fuzzy Systems
8(2) pages 80-88.
Aran, O., Burger, T., Caplier, A. Akarun, L., 2009. A
belief-based sequential fusion approach for fusing
manual signs and non-manual signals, Pattern
Recognition 42, 812–822.
Assalaeh, K., Al-Roussan, M. 2005. Recognition of
Arabic Sgn Language Alphabet using Polynomial
Classifier. In EURASIP journal on Applied Signal
Processing 13 pages 2136-2145.
Dreuw, P., Stein, D., Desealers, T., Rybach, D., Zahedi,
M., Ney, H. 2008: Spoken Language Processing
Techniques for Sign Language Recognition and
Translation, In Technology and Disability. Vol 20.
Amesterdam.
Erdelyi, W., Magnus, F., Oberthtingger, F., Tricomi, F.,
1953 Higher Transcendental functions, Vol 2
McGraw-Hill, New York, USA.
Hu, M.-K., 1962. Visual pattern recognition by moment
invariants, information theory. IEEE Trans. 8 (2),
179–187. ISSN 0018-9448.
Just, A., Rodriguez, Y., Marcel, S., 2006. Hand posture
classification and recognition using the modified
census transform. In: 7th Internat. Conf. on Automatic
Face and Gesture Recognition, FGR, pp. 351–356.
doi: 10.1109/FGR.2006.62.
Kadous, M. W. 1995: Recognition of Australian Sign
Language Using Instrumented Gloves. Bachelor’s
thesis, University of New South Wales.
Kelly, D., McDonald, J., Markham, C. 2010: A person
independent system for recognition of hand postures
used in sign language. In Pattern Recognition Lett.
31.1359-1368.
Mukundan, R., Ong, S. H., Lee, P. A., 2001. Image
analysis by Tchebichef moments. In IEEE Trans.on
image processing 10(9) 01357-1364.
Starner, T., Pentland, A. 1996: Real-Time American Sign
language Recognition from video Using Hidden
Markov Models. In MIT Media Laboratory Perceptual
Computing Section Technical Report N°375.
Triesch, J., Von der malsuburg, C. 2002: Classification of
hand postures against complex backgrounds using
elastic graph matching. In Image Vision Comput. 20
(13-14), 937-943.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
584
