
OPTICAL FLOW ESTIMATION WITH CONFIDENCE MEASURES
FOR SUPER-RESOLUTION BASED ON RECURSIVE ROBUST
TOTAL LEAST SQUARES
Tobias Schuchert and Fabian Oser
Fraunhofer IOSB, Fraunhoferstr. 1, Karlsruhe, Germany
Keywords:
Optical flow, Motion estimation, Super resolution, Confidence measures.
Abstract:
In this paper we propose a novel optical flow estimation method accompanied by confidence measures. Our
main goal is fast and highly accurate motion estimation in regions where information is available and a con-
fidence measure which identifies these regions. Therefore we extend the structure tensor method to robust
recursive total least squares (RRTLS) and run it on a GPU for real-time processing. Based on a coarse-to-fine
framework we propagate not only the motion estimates to finer scales but also the covariance matrices, which
may be used as confidence measures. Experiments on synthetic data show the benefits of our approach. We ap-
plied the RRTLS framework to a real-time super-resolution method for deforming objects which incorporates
the confidence measures and demonstrates that propagating the covariances through the pyramid improves
super-resolution results.
1 INTRODUCTION
Many methods for motion estimation between two or
more images have been proposed in the last years. In
2007 the Middlebury benchmark (Baker et al., 2011)
was proposed, where to date about 50 motion esti-
mation methods have been compared (including im-
plementations of the well known optical flow meth-
ods of (Horn and Schunck, 1981), and (Lucas and
Kanade, 1981)). The benchmark consists of several
synthetic and real world sequences and handles many
different use cases. Also different masks for disconti-
nuities and untextured regions are available and used
for comparing the algorithms for these special prob-
lems. For more details on optical flow methods we
refer to the surveys in (Barron et al., 1994) and (We-
ickert et al., 2006).
Nevertheless there exist applications where it is
important to know, where an estimation is reliable and
where not. In other applications a confidence measure
may help to improve further processing steps. For ex-
ample (1) a precise estimation of unknown motions,
e.g. cell growth, may be heavily affected by a smooth-
ness constraint, as small important motions may be
over-smoothed or (2) estimation of super-resolution
images from image sequences based on motion esti-
mates may include the reliability of the motion esti-
mates to weight the different image and motion pa-
rameters.
In this paper we present a total least squares (TLS)
framework for optical flow estimation. In order to
cope with discontinuities and large motions we devel-
oped a robust recursive TLS in a coarse-to-fine frame-
work. We estimate motion and the reliability of these
motions on each pyramid step and propagate the es-
timation results and the confidence measures through
the different scales.
The Middlebury benchmark (Baker et al., 2011)
gives an overview of current state-of-the art motion
estimation techniques. Most of these techniques are
based on variational approaches which yield full flow
fields and high accuracy. Moreover there exist ef-
ficient parallel implementation frameworks for vari-
ational methods making them real-time efficient on
current GPUs
1
(Werlberger et al., 2009).
Local methods consider only neighbouring im-
age regions and are therefore even more suited for
parallelization. However, only few local methods
are present on the Middlebury benchmark website.
Mostly as reference methods and with unsatisfying
results, although they proved to yield high accuracy
(cmp. (Haussecker and Spies, 1999)). Recently (Senst
et al., 2011) proposed a local method for optical flow
estimation and feature tracking implemented on a
1
Graphics Processing Unit
463
Schuchert T. and Oser F. (2012).
OPTICAL FLOW ESTIMATION WITH CONFIDENCE MEASURES FOR SUPER-RESOLUTION BASED ON RECURSIVE ROBUST TOTAL LEAST
SQUARES.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 463-469
DOI: 10.5220/0003785904630469
Copyright
c
SciTePress

GPU. This method is based on ordinary least squares
and does not provide confidence measures.
To the best of our knowledge none of the methods
on the Middlebury website yields special reliability
measures for motion estimates. The publicly avail-
able version of (Werlberger et al., 2009) offers the
possibility to calculate a geometric reliability mea-
surement for each estimate. There the flow field is
compared in both directions for inconsistency and the
result is mapped to a probability distribution. Another
method is to compute the inverse of the variational
energy in a local region, to identify regions, where
the energy is still large (Bruhn and Weickert, 2006).
There exist a number of confidence measures for lo-
cal methods, e.g. spatial coherence or corner measure
(cmp. (Haussecker and Spies, 1999)). (Kondermann,
2009) compared different confidence measures for lo-
cal and global methods, but did not find a satisfy-
ing one. Therefore Kondermann proposed two confi-
dence measures based on motion statistics from sam-
ple data and a hypothesis test, which yield superior
results compared to the two methods mentioned be-
fore. These measures are applicable to all optical flow
fields (local/global) afterwards. However, these mea-
sures must be trained before and are therefore no al-
ternatives in our case as learning motion statistics is
expensive and training data must be available.
Based on the structure tensor approach (Foerst-
ner and Guelch, 1987) we developed a novel ro-
bust recursive total least squares framework, which
allows accurate motion estimation in structured re-
gions and computing the covariance matrix of each
estimate. This framework is related to the robust to-
tal least squares method presented by (Bab-Hadiashar
and Suter, 1998), but compared to their method we
(1) combine the structure tensor approach with a ro-
bust function and do not use LMSOD or LMedS for
outlier detection, which speeds up computation with-
out loss of accuracy, (2) use a coarse-to-fine frame-
work to handle large motions, and (3) use the covari-
ance matrix based on the approximation of (Nestares
et al., 2000) as a reliable confidence measure. There-
fore we propagate not only the motion estimates but
also the covariance matrices through the different
pyramid steps, similar to a Kalman filter approach
(cmp. (Simoncelli, 1999)). In experiments we demon-
strate the applicability of our approach.
In the first section of this paper the optical flow
estimation framework is presented. This includes
how the structure tensor approach is combined with
a robust implementation and how it is integrated in
a coarse-to-fine framework based on recursive total
least squares (TLS). Then in Sec. 3 computation and
distribution of covariance matrices on different scales
of the pyramid are shown. Experiments in Sec. 4 show
the accuracy of the optical flow estimator on synthetic
sinusoidal sequences and the Middlebury benchmark
and is compared to the method of (Werlberger et al.,
2009), one of the fastest global estimator, which is
still ranked high in the Middlebury benchmark. Sec-
tion 5 shows application of the new framework for
super-resolution. We show how the covariance is in-
corporated into the super-resolution framework im-
proving the results on real images. A summary and
an outlook on future work follows in Sec. 6.
2 ESTIMATION FRAMEWORK
We present an extended version of the well known
structure tensor method (Foerstner and Guelch, 1987)
for optical flow estimation. On the one hand we inte-
grate a robust function to handle outliers following
(Black and Anandan, 1996) and (Schuchert, 2010)
and on the other hand we include the renormaliza-
tion technique of (Kanatani, 1996) to avoid systematic
bias following (Chojnacki et al., 2001). This modified
structure tensor method is then embedded in a coarse-
to-fine strategy based on recursive total least squares
(cmp. (Boley et al., 1996)). In the following we ex-
plain these steps in more detail.
The structure tensor approach is based on the
brightness constancy constraint equation (BCCE)
g
x
u
x
+ g
y
u
y
+ g
t
= g
T
p = 0 (1)
with image gradients g = (g
x
,g
y
,g
t
)
T
, optical flow
u = (u
x
,u
y
)
T
and parameter vector p = (p
1
, p
2
, p
3
)
T
.
The parameter vector and the optical flow vector are
related by u = 1/p
3
(p
1
, p
2
)
T
. It is assumed that so-
lution vector
˜
p approximately solves all constraint
equations in the local neighbourhood Λ with size N
and therefore g
T
i
p with i ∈ [1,N] only approximately
equals 0. We get
g
T
i
p = e
i
∀i ∈
{
1,...,N
}
(2)
with errors e
i
which have to be minimized by the
sought solution
˜
p. We minimize e in a weighted 2-
norm
p = argmin kek
2
2
, with
kek
2
2
=
∑
N
i=1
p
T
g
i
w
i
g
T
i
p
p
T
p
=: p
T
Jp
(3)
where w
i
is the weight for the i-th constraint and
where matrix J is called structure tensor. In general
Gaussian weights are used to reduce the influence of
constraints far away from the center pixel. The addi-
tional constraint |p| = 1 is introduced to avoid the triv-
ial solution p = 0. An eigenvalue analysis yields the
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
464

minimum solution, i.e. the eigenvector to the smallest
eigenvalue of J.
In order to reduce the influence of outliers in the
solution we introduce a robust function ρ into the es-
timation
p = argmin kek
ρ
, with
kek
ρ
=
N
∑
i=1
ρ(e
i
,σ) =
N
∑
i=1
ρ
g
T
i
p,σ
(4)
with a variable parameter σ. As robust function we
choose the Lorentzian
ρ
Lor
(x,σ) = log
1 +
1
2
x
σ
2
. (5)
where σ is adapted following (Black and Anandan,
1996). We iteratively solve the structure tensor
method and update the weights according to (4).
(Chojnacki et al., 2001) presented a new deriva-
tion of the renormalization method of Kanatani. We
use this method in our robust total least squares
framework as follows. Starting from the standard TLS
estimation p
T LS
= p
0
we iteratively solve the general-
ized eigenvalue problem
M
p
k
ξ = λ N
p
k
ξ (6)
with p
k+1
= ξ
min
the smallest eigenvector to the
smallest eigenvalue λ
min
. The matrices are given by
M
p
k
=
N
∑
i=1
A
i
p
T
k
C
i
p
k
(7)
and
N
p
k
=
N
∑
i=1
C
i
p
T
k
C
i
p
k
, (8)
where A is the unsmoothed structure tensor, i.e. J with
w
i
= 1 ∀i ∈
{
1,...,N
}
, and C is the covariance matrix
of the image gradients. The iteration is stopped, when
|p
k
− p
k−1
| < ε where ε is a small fixed threshold. In
case of a translational motion model the covariance
matrix C
i
is constant in a neighbourhood, so the de-
nominator can be excluded from the sum, which sim-
plifies computation. For further details we refer to
(Chojnacki et al., 2001).
For estimation of large distances a coarse-to-fine
framework based on Gaussian pyramids is used. In
order to propagate the result through the scales we use
recursive TLS following (Boley et al., 1996). Then
the structure tensor on the current scale l is achieved
by
J
l
=
ˆ
J
l
+ β
ˇ
J
l−1
(9)
with recursive weighting factor β.
ˆ
J
l
is the standard
structure tensor of the current scale, but with warped
temporal gradients g
t
. These temporal gradients are
computed following (Simoncelli, 1999), i.e. the filters
are sheared in the direction of the flow. The temporal
derivatives g
t
then include the motion estimate from
the previous scale and therefore
ˇ
J
l−1
contains only
the 2× 2 spatial structure tensor of the previous scale.
The last row and column of
ˇ
J
l−1
are set to zeros.
3 COVARIANCE ESTIMATION
Following (Nestares et al., 2000) and (Schuchert
et al., 2010) we approximate the error covariance ma-
trices of the optical flow estimates by the inverse of
the Hessian, given by
H =
γ
σ
2
n
||p||
2
S −
1
||p||
2
p
T
Jp
I
(10)
where S is given by the 2 × 2 spatial structure tensor,
I is an identity matrix of the same size as S. The pa-
rameter γ is proportional to the signal to noise ratio.
We set this parameter for all our experiments to γ = 1.
The Covariance matrix is propagated through the
different scales analogue to the structure tensor using
the recursive technique proposed in (9).
4 EXPERIMENTS
We evaluated our algorithm (RRTLS) on synthetic
sinusoidal sequences and on the Middlebury bench-
mark (Baker et al., 2011). We used 3 × 3 Scharr
filters (Scharr, 2005) for spatial gradient estimation.
The image pyramid starts by sizes of 20 pixel on the
smaller side and we used a downsampling factor of
0.85 for all sequences. The recursive weighting factor
is set to β = 0.4 for both, the structure tensor and the
covariance matrix.
We compare our results with the Anisotropic-Huber-
L1 method proposed in (Werlberger et al., 2009). This
algorithm is among the best and fastest algorithms
on the Middlebury benchmark and is named AHL1
in the remainder of this paper. AHL1 is based on a
variational framework using a smoothness term in or-
der to estimate motion also in regions where no or
not much data is available. The method is public-
ity available and offers the possibility to calculate the
geometric confidence measure (cmp. Sec. 1). We use
the proposed high accuracy parameters from (Werl-
berger et al., 2009) and leave all other parameters in
the standard configuration for all sequences. We use
two frames for experiments with AHL1 and three im-
ages for RRTLS wherever possible. (Werlberger et al.,
2009) stated that the two frames version of their esti-
mator yields better results, on the Middlebury bench-
mark. However RRTLS produced better results, es-
OPTICAL FLOW ESTIMATION WITH CONFIDENCE MEASURES FOR SUPER-RESOLUTION BASED ON
RECURSIVE ROBUST TOTAL LEAST SQUARES
465

pecially more reliable covariance estimations, if three
frames are used.
4.1 Sinusoidal Sequences
In order to evaluate the performance of our RRTLS
and its covariance estimation, we used two sinusoidal
patterns which move contrary to each other with a non
structured background and a non structured rectan-
gle in the middle (cmp. Fig. 1a). The colour coded
ground truth motion is displayed in Fig. 1b and the
corresponding colour code is shown in Fig. 1g. The
magnitude of the motion is below one pixel. Nev-
ertheless both algorithms are using the coarse-to-fine
framework. The estimates of AHL1 and of RRTLS are
shown in Fig. 1c and e, respectively.
The effect of the smoothness constraint in AHL1 can
be clearly seen as motion is also estimated in regions,
where neither structure nor motion is present. RRTLS
estimates no or only small motion in regions where
no motion is present, however at borders the estimates
are heavily degraded. Figure 1h shows the estimated
trace of the covariances from RRTLS coded with a
grey scale. White means low and black high confi-
dence.
The regions where estimates are highly unreliable are
clearly visible, i.e. white and grey. Also the AHL1
yields a geometric confidence measure. Figures 1d
and f show 50 percent of the best motion estimates
masked by the corresponding confidence measures of
AHL1 and RRTLS. The geometric confidence measure
of AHL1 masked some regions, where no structure is
available, but not all. Moreover It removes regions on
the patterns, where estimates should be reliable. Our
proposed method masks unreliable estimates much
better and keeps most of the regions on the patterns.
We also tested other confidence measures for
structure tensor methods, proposed in (Haussecker
and Spies, 1999), where the corner measures c
c
yields
best results. The corner measure c
c
is the difference
between the total coherence measure and the spatial
coherence measure and is computed from the eigen-
values of the structure tensor method.
Table 1 summarizes average endpoint errors
(cmp. (Baker et al., 2011)) for 50% masks by the trace
of the propagated covariance, the trace of the covari-
ance only on the finest grid, i.e. not propagated, and
the corner measure. Errors are calculated for different
noise standard deviations σ
n
. The propagated covari-
ance shows to be clearly the most reliable confidence
measure.
a b
c d
e f
g h
Figure 1: Sinusoidal pattern data with noise and estimated
flow and confidence measure. a: one image of the input se-
quence, b: is the true flow (colour coded), c: flow estimates
of AHL1 and d: masked flow estimates of AHL1 using their
confidence mask. e and f are flow estimates of RRTLSand
the masked results with the RRTLSconfidence measure. g
and h show the colour code and the estimated covariance
grey scale coded of our algorithm, respectively.
Table 1: Comparison of different confidence measures. Av-
erage endpoint error for the 50% most reliable estimates of
RRTLS on the sinusoidal pattern sequence.
Confidence measure σ
n
= 0 σ
n
= 1 σ
n
= 5
propagated covariance 0.008 0.024 0.075
covariance 0.012 0.179 0.212
corner measure (c
c
) 0.032 0.161 0.208
4.2 Middlebury Benchmark
We evaluated our algorithm on the well known Mid-
dlebury benchmark (Baker et al., 2011). We are not
interested in achieving overall best results on this
benchmark, but to have best results in regions where
the confidence of our measurement is high, i.e. where
the trace of the estimated covariance matrix is low.
Figure 2 shows the input image of the Urban3 se-
quence (Fig. 2a), the colour coded ground truth flow
(Fig. 2d) and the estimated flows of AHL1 (Fig. 2c)
and RRTLS(Fig. 2e). In Fig. 2d and f only the best
50% of the estimates according to their confidence
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
466
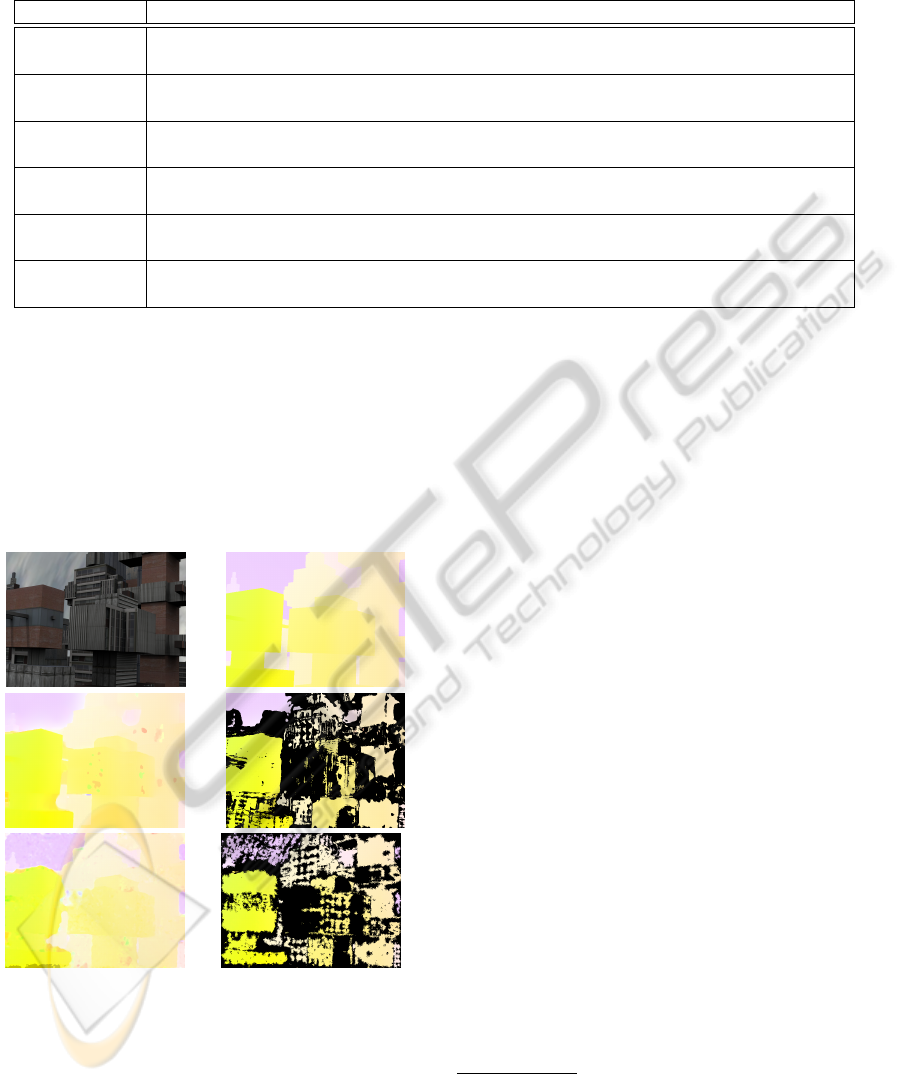
Table 2: Average Endpoint Error on the Middlebury data set using standard masks (disc and untext) and masks based on
confidence measures. Results in brackets are for the 2 frame RRTLS, because only 2 frames are available.
Algorithm Mask Dim Grove2 Grove3 Hyd RW Urban2 Urban3 Venus
AHL1 all 0.175 0.161 0.641 0.202 0.155 0.389 0.721 0.332
RRTLS (sym) all (0.375) 0.207 0.751 0.449 0.271 1.159 0.707 (0.931)
AHL1 disc 0.269 0.473 1.222 0.502 0.528 1.734 2.298 1.098
RRTLS (sym) disc (0.537) 0.562 1.494 1.053 0.758 2.358 2.797 (2.132)
AHL1 untext 0.200 0.138 0.631 0.129 0.137 0.402 0.778 0.350
RRTLS (sym) untext (0.438) 0.201 0.637 0.293 0.257 1.210 0.704 (1.215)
AHL1 95% 0.174 0.123 0.537 0.176 0.126 0.246 0.612 0.278
RRTLS (sym) 95% (0.352) 0.168 0.647 0.405 0.223 0.977 0.660 (0.855)
AHL1 75% 0.176 0.088 0.316 0.115 0.093 0.185 0.403 0.243
RRTLS (sym) 75% (0.262) 0.124 0.337 0.268 0.157 0.643 0.360 (0.599)
AHL1 50% 0.175 0.068 0.171 0.066 0.084 0.138 0.244 0.237
RRTLS (sym) 50% (0.209) 0.105 0.193 0.147 0.125 0.594 0.168 (0.339)
measures are displayed. The same effects as on
the sinusoidal sequence can be seen here. AHL1
over-smooths motion borders, whereas RRTLS yields
highly erroneous estimates in some parts of the im-
age, e.g. lower left border. Nevertheless the covari-
ance of these estimates is high and can be masked out,
whereas wrong estimates of AHL1 are not recognized,
e.g. the over-smoothing in the lower bottom left part
of the image.
a b
c d
e f
Figure 2: One sequence of the Middlebury benchmark. a:
one input image, b: true flow (colour coded), c and e: flow
estimates AHL1 and RRTLS respectively. d and f: masked
estimates using the corresponding confidence masks.
Table 2 shows results on the other Middlebury
benchmarks for both estimators. Additional to the
masks from Middlebury, i.e. disc (discontinuities) and
untext (untextured regions), the masks filter 90%,
75% and 50% of the best estimates according to the
confidence measure. It can be clearly seen, that AHL1
outperforms our method in almost all cases. Using
confidence masks, our method achieves on almost all
sequences considerable better results and the errors
get near or even below the results of AHL1. This
demonstrates the reliability of our covariance mea-
sure and that our estimator can compete with AHL1
in accuracy, if only 50% of the best estimates are con-
sidered. Moreover our method is more than 3 times
faster than AHL1 on images of size 640 × 480 pixel.
5 APPLICATION
A reliable confidence measure of the motion estima-
tion may be used to improve further processing steps.
Super-resolution from multiple images needs reliable
motion estimation. Most approaches assume con-
stant or affine motions over the whole image. These
assumptions do not hold for deformable surfaces,
i.e. faces. Moreover we have the problem, that not all
facial images in a sequences are achieved from front
view. Some super-resolution techniques therefore fil-
ter incoming images before computation in order to
reject images with large motions or achieved from dif-
ferent view points.
In order to cope with these problems, we integrated
the RRTLS-algorithm into a super-resolution frame-
work, based on the multi-frame super-resolution tech-
nique proposed by (Farsiu et al., 2003). There atmo-
spheric blur is neglected and a blur-warp-model
2
is
2
Farsiu starts with a warp-blur-model but translates it into a
blur-warp-model because of a translational motion assumption.
This is not the case for deformable surfaces like faces. However
(Wang and Qi, 2004) showed, that when motion is estimated on
low-resolution images, the warp-blur-model has a systematic error
and the blur-warp-model may be used.
OPTICAL FLOW ESTIMATION WITH CONFIDENCE MEASURES FOR SUPER-RESOLUTION BASED ON
RECURSIVE ROBUST TOTAL LEAST SQUARES
467
used
y
k
= DF
k
Hx + v
k
k ∈ [1, N] , (11)
where x is the high resolution image of size
[rM
1
× rM
2
], y
k
are the k low resolution images
of size [M
1
× M
2
] and v
k
is the additive system-
atic noise. The Blurring operator H is the Point-
Spread-Function of the camera (here a 5x5 Gaus-
sian filter), the warping-operator F
k
is modelled by a
r
2
M
1
M
2
× r
2
M
1
M
2
matrix and the downsampling-
factor D by a
M
1
M
2
× r
2
M
1
M
2
matrix. Using a L
P
-
norm we have to find the minimum of
ˆ
x = argmin
x
"
N
∑
k=1
kDF
k
Hx − y
k
k
p
p
#
. (12)
Farsiu estimates the minimum solution in two steps.
First the low-pass filtered high resolution image
z = Hx is determined by data fusion of the low-
resolution images based on motion estimates. The
low-resolution images are registered on the high reso-
lution grid and then filtered by a median for each high
resolution pixel. In the second step the image z is de-
blurred. We use the estimated covariance of RRTLS in
both steps. In step one the data is fused based on the
estimated motion. The median filter is realized as a
weighted median based on the trace of the covariance
estimates. In the second step the trace of the covari-
ance also influences the deblurring of the high resolu-
tion image when the single high resolution pixels are
weighted. For further details on the super-resolution
algorithm we refer to (Farsiu et al., 2003).
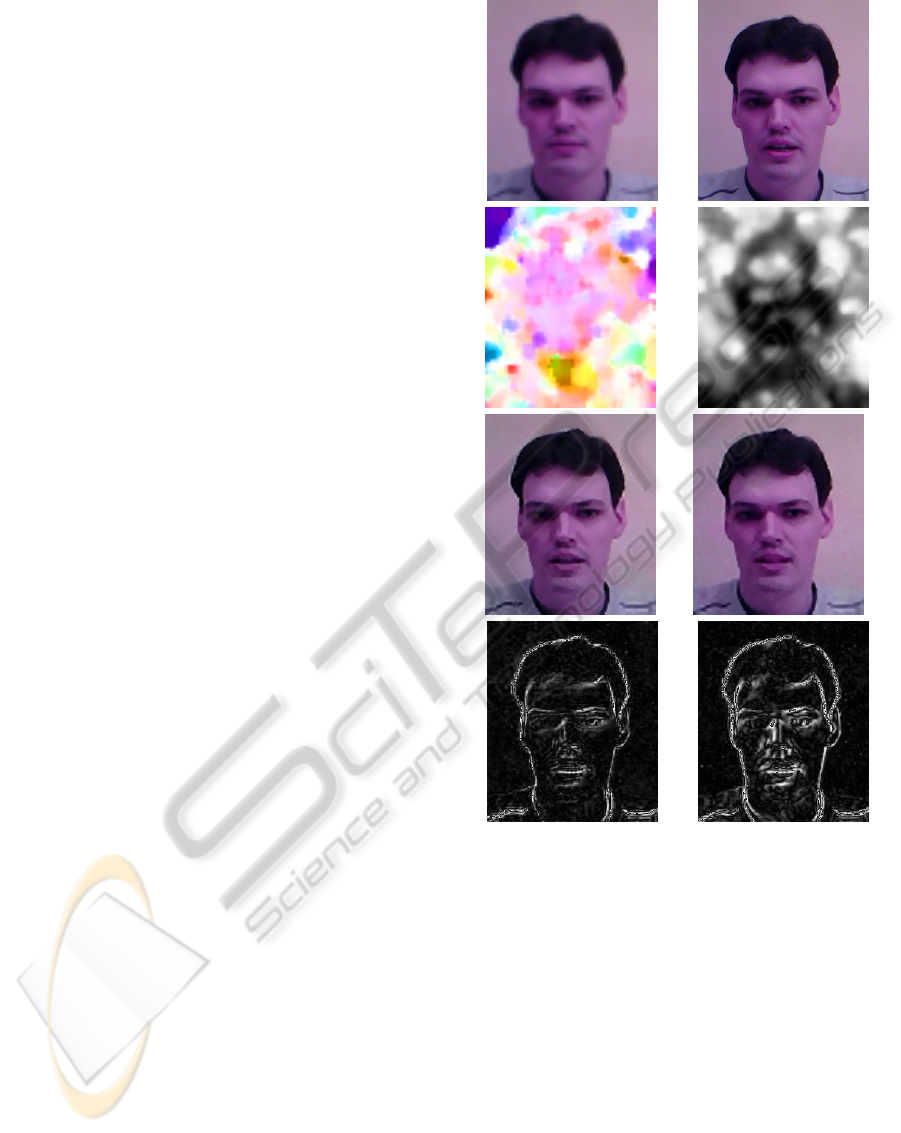
Figure 3 shows estimation results for a se-
quence of facial images. The low resolution images
(e.g. Fig. 3a) are computed from the high resolution
images (Fig. 3b) by downsampling, smoothing and
addition of noise. The sequence consists of 9 facial
images with small head movements and motion of
the lips (speaking) and 58 images showing parts of
the head or background only. All low-resolution im-
ages are referenced on the low-resolution image of
Fig. 3e. The estimated flow for one low resolution
image with RRTLS is depicted in Fig. 3c and the trace
of the corresponding covariance estimates in Fig. 3d.
Again white defines high and black low covariances.
Figures 3e and f show the estimated high resolution
images with and without using the covariance infor-
mation. In Fig. 3g and h the difference error between
the estimated super-resolution images and the original
high resolution image is shown for both algorithms.
The difference error is scaled by a factor of 6. Differ-
ences appear mostly in regions where larger motions
are present, i.e. at the sides of the head and in the re-
gion around the mouth. Using covariance informa-
tion for super-resolution highly improves the estima-
tion (cmp. Fig. 3g).
a b
c d
e f
g h
Figure 3: Results for super-resolution. a: One low res-
olution input image, b: high resolution image, c: esti-
mated flow with RRTLS, d: estimated covariance grey
value coded, e and f: high resolution images estimated by
our algorithm with and without using the covariance, re-
spectively, and g and h: difference images between com-
puted super-resolution and high resolution image.
6 SUMMARY
In this paper we presented a novel method for motion
estimation with confidence measures implemented
on GPU. The method is based on robust total-least
squares, embedded in a coarse-to-fine framework us-
ing a recursive algorithm. We have shown that the
estimated covariance matrices which are propagated
through the whole pyramid are well suited as confi-
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
468

dence measure (e.g. the trace of the covariance ma-
trix). Experiments on synthetic sequences showed the
good performance of this approach.
We used the estimated motion and confidence mea-
sures to improve a super-resolution method. How-
ever, motion estimates are still not as accurate as best
estimators in the Middlebury benchmark. In future we
plan for a improvements for large motions, more com-
plex motion models, e.g. affine motion models, and
motions under changing illumination, e.g. by consid-
ering gradient information or estimation of illumina-
tion changes.
REFERENCES
Bab-Hadiashar, A. and Suter, D. (1998). Robust optic flow
computation. International Journal of Computer Vi-
sion, 29(1):59–77.
Baker, S., Scharstein, D., Lewis, J., Roth, S., Black, M.,
and Szeliski, R. (2011). A database and evaluation
methodology for optical flow. International Journal of
Computer Vision, pages 1–31. 10.1007/s11263-010-
0390-2.
Barron, J. L., Fleet, D. J., and Beauchemin, S. S. (1994).
Performance of optical flow techniques. Int. Journal
of Computer Vision, 12:43–77.
Black, M. and Anandan, P. (1996). The robust estimation of
multiple motions: parametric and piecewise-smooth
flow fields. In Computer Vision and Image Under-
standing, volume 63(1), pages 75–104.
Boley, D., Steinmetz, E., and Sutherland, K. (1996). Recur-
sive total least squares: An alternative to using the dis-
crete kalman filter in robot navigation. In Reasoning
with Uncertainty in Robotics, volume 1093 of Lecture
Notes in Computer Science, pages 221–234. Springer
Berlin / Heidelberg. 10.1007/BFb0013963.
Bruhn, A. and Weickert, J. (2006). A confidence measure
for variational optic flow methods. In Properties for
Incomplete data, pages 283–298. Springer.
Chojnacki, W., Brooks, M. J., and Hengel, A. V. D. (2001).
Rationalising the renormalisation method of kanatani.
Journal of Mathematical Imaging and Vision, 14:21–
38.
Farsiu, S., Robinson, D., Elad, M., and Milanfar, P. (2003).
Fast and robust multi-frame super-resolution. IEEE
Transactions on Image Processing, 13:1327–1344.
Foerstner, W. and Guelch, E. (1987). A fast operator for de-
tection and precise location of distinct points, corners
and centers of circular features. In Proceedings of the
ISPRS Intercommission Workshop on Fast Processing
of Photogrammetric Data, pages 281–305.
Haussecker, H. and Spies, H. (1999). Motion. In Handbook
of Computer Vision and Applications, volume 2, chap-
ter 13, pages 309–396. Academic Press, 1 edition.
Horn, B. and Schunck, B. (1981). Determining optical flow.
Artificial Intelligence, 17:185–204.
Kanatani, K. (1996). Statistical Optimization for Geometric
Computation: Theory and Practice. Elsevier.
Kondermann, C. (2009). Postprocessing and Restoration of
Optical Flows. PhD thesis, Heidelberg University.
Lucas, B. D. and Kanade, T. (1981). An iterative image
registration technique with an application to stereo vi-
sion. In Proceedings of the 7th international joint
conference on Artificial intelligence - Volume 2, pages
674–679, San Francisco, CA, USA.
Nestares, O., Fleet, D. J., and Heeger, D. J. (2000). Likeli-
hood functions and confidence bounds for Total Least
Squares estimation. In Proc. IEEE Conf. on Computer
Vision and Pattern Recognition (CVPR’2000).
Scharr, H. (2005). Optimal filters for extended optical flow.
In Complex Motion, 1. Int. Workshop, G
¨
unzburg, Oct.
2004, volume 3417 of Lecture Notes in Computer Sci-
ence, Berlin. Springer Verlag.
Schuchert, T. (2010). Plant leaf motion estimation using
a 5D affine optical flow model. PhD thesis, RWTH
Aachen University.
Schuchert, T., Aach, T., and Scharr, H. (2010). Range flow
in varying illumination: Algorithms and comparisons.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 32:1646–1658.
Senst, T., Eiselein, V., Evangelio, R. H., and Sikora, T.
(2011). Robust modified l2 local optical flow esti-
mation and feature tracking. In IEEE Workshop on
Motion and Video Computing, pages 685–690, Kona,
USA.
Simoncelli, E. P. (1999). Bayesian multi-scale differential
optical flow. In Handbook of Computer Vision and
Applications, volume 2, chapter 14, pages 397–422.
Academic Press, San Diego.
Wang, Z. and Qi, F. (2004). On ambiguities in super-
resolution modeling. Signal Processing Letters, IEEE,
11(8):678–681.
Weickert, J., Bruhn, A., Brox, T., and Papenberg, N. (2006).
A survey on variational optic flow methods for small
displacements. In Mathematical Models for Registra-
tion and Applications to Medical Imaging, volume 10
of Mathematics in Industry, pages 103–136. Springer
Berlin Heidelberg.
Werlberger, M., Trobin, W., Pock, T., Wedel, A., Cremers,
D., and Bischof, H. (2009). Anisotropic huber-l1 opti-
cal flow. In Proceedings of the British Machine Vision
Conference (BMVC), London, UK.
OPTICAL FLOW ESTIMATION WITH CONFIDENCE MEASURES FOR SUPER-RESOLUTION BASED ON
RECURSIVE ROBUST TOTAL LEAST SQUARES
469
