
ASSET: APPROXIMATE STOCHASTIC SUBGRADIENT
ESTIMATION TRAINING FOR SUPPORT VECTOR MACHINES
Sangkyun Lee
1
and Stephen J. Wright
2
1
Computer Science Department, LS VIII, University of Technology, Dortmund, Germany
2
Computer Sciences Department, University of Wisconsin, Madison, WI, U.S.A.
Keywords:
Stochastic approximation, Large-scale, Online learning, Support vector machines, Nonlinear kernels.
Abstract:
Subgradient methods for training support vector machines have been quite successful for solving large-scale
and online learning problems. However, they have been restricted to linear kernels and strongly convex for-
mulations. This paper describes efficient subgradient approaches without such limitations, making use of
randomized low-dimensional approximations to nonlinear kernels, and minimization of a reduced primal for-
mulation using an algorithm based on robust stochastic approximation, which do not require strong convexity.
1 INTRODUCTION
The algorithms for training the support vector ma-
chines (SVMs) can be broadly categorized into (i) de-
composition methods such as SVM-Light (Joachims,
1999) and LASVM (Bordes et al., 2005), (ii)
cutting-plane methods for linear kernels (SVM-
Perf (Joachims, 2006) and OCAS (Franc and
Sonnenburg, 2008)) and for nonlinear kernels (
CPNY (Joachims et al., 2009) and CPSP (Joachims
and Yu, 2009)), and (iii) subgradient methods for lin-
ear kernels including Pegasos (Shalev-Shwartz et al.,
2007) and SGD (Bottou, 2005). Subgradient methods
are of particular interest, since they are well suited to
large-scale and online learning problems.
This paper aims to provide practical subgradient
algorithms for training SVMs with nonlinear kernels,
overcoming the weakness of the updated Pegasos al-
gorithm (Shalev-Shwartz et al., 2011) which uses ex-
act kernel information and requires a dual variable for
each training example in the worst case. Our approach
uses a primal formulation with low-dimensional ap-
proximations to feature mappings. Such approxima-
tions are obtained either by approximating the Gram
matrix or by constructing subspaces with random
bases approximating the feature spaces induced by
kernels. These approximations can be computed and
applied to data points iteratively, and thus are suited
to an online context. Further, we suggest an efficient
way to make predictions for test points using the ap-
proximate feature mappings, without recovering the
potentially large number of support vectors.
Unlike Pegasos, we use Vapnik’s original SVM
formulation without modifying the objective to
be strongly convex. Our main algorithm takes
steplengths of size O(1/
√
t) (associated with robust
stochastic approximation methods (Nemirovski et al.,
2009; Nemirovski and Yudin, 1983) and online con-
vex programming (Zinkevich, 2003)), rather than the
O(1/t) steplength scheme in Pegasos. We see lit-
tle practical difference between O(1/
√
t) steplengths
and O(1/t) steps.
2 NONLINEAR SVMS IN PRIMAL
We discuss the primal SVM formulation in a low-
dimensional space induced by kernel approximation.
2.1 Structure of the Formulation
Let us consider the training point and label pairs
{(t
i
,y
i
)}
m
i=1
for t
i
∈ R
n
and y
i
∈ R, and a feature
mapping φ : R
n
→ R
d
. Given a convex loss function
ℓ(·) : R → R ∪{∞} and λ > 0, the primal SVM prob-
lem (for classification) can be stated as follows :
(P1) min
w∈R
d
,b∈R
λ
2
w
T
w+
1
m
m
∑
i=1
ℓ(y
i
(w
T
φ(t
i
) + b)).
By substituting the following into (P1):
w =
m
∑
i=1
α
i
φ(t
i
), (1)
223
Lee S. and Wright S. (2012).
ASSET: APPROXIMATE STOCHASTIC SUBGRADIENT ESTIMATION TRAINING FOR SUPPORT VECTOR MACHINES.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 223-228
DOI: 10.5220/0003786202230228
Copyright
c
SciTePress

we obtain
(P2) min
α∈R
m
,b∈R
λ
2
α
T
Ψα+
1
m
m
∑
i=1
ℓ(y
i
(Ψ
i·
α+ b)),
where Ψ ∈R
m×m
is defined by Ψ
ij
:= φ(t
i
)
T
φ(t
j
) for
i, j = 1,2,...,m, and Ψ
i·
denotes the i-th row of Ψ.
Optimality conditions for (P2) are as follows:
λΨα+
1
m
m
∑
i=1
β
i
y
i
Ψ
T
i·
= 0,
1
m
m
∑
i=1
β
i
y
i
= 0, (2)
for some β
i
∈ ∂ℓ(y
i
(Ψ
i·
α+ b)), i = 1,2,... , m.
Then we can derive the following result via convex
analysis (see Lee and Wright (2011) for details).
Proposition 1. Let (α,b) ∈ R
m
×R be a solution of
(P2). Then if we define w by (1), (w,b) ∈ R
d
×R is a
solution of (P1).
Without loss of generality, (2) suggests that we
can constrain α to have the form
α
i
= −
y
i
λm
β
i
.
These results clarify the connection between the ex-
pansion coefficient α and the dual variable β, which
is introduced in Chapelle (2007) but not fully expli-
cated there.
2.2 Reformulation with Approximations
Consider the feature mapping φ
◦
: R
n
→ H to a
Hilbert space H induced by a kernel k
◦
: R
n
×R
n
→R
satisfying Mercer’s Theorem. Suppose that we have
an approximation φ : R
n
→ R
d
of φ
◦
for which
k
◦
(s,t) ≈ φ(s)
T
φ(t), (3)
for all inputs s and t of interest. If we construct a
matrix V ∈ R
m×d
by defining its i-th row as
V
i·
= φ(t
i
)
T
, i = 1, 2, . . . , m, then we have (4)
Ψ := VV
T
≈ Ψ
◦
:= [k
◦
(t
i
,t
j
)]
i, j=1,2,...,m
. (5)
Ψ is a positive semidefinite rank-d approximation to
Ψ
◦
. Substituting Ψ = VV
T
and γ := V
T
α in (P2) leads
to the equivalent formulation
(PL) min
γ∈R
d
,b∈R
λ
2
γ
T
γ+
1
m
m
∑
i=1
ℓ(y
i
(V
i·
γ+ b)).
This problem can be regarded as a linear SVM with
transformed feature vectors V
T
i·
∈ R
d
, i = 1,2,...,m.
2.3 Approximating the Kernel
We discuss two techniques to obtain V satisfying (5).
2.3.1 Kernel Matrix Approximation
For some integer d and s such that 0 < d ≤ s < m,
we choose s elements at random from the index set
{1,2, . . . , m} to form a subset S . We then find the best
rank-d approximationW
S ,d
to (Ψ
◦
)
S S
, and its pseudo-
inverse W
+
S ,d
. We choose V so that
VV
T
= (Ψ
◦
)
·S
W
+
S ,d
(Ψ
◦
)
T
·S
, (6)
where (Ψ
◦
)
·S
denotes the column submatrix of Ψ
◦
corresponding to S . When s is sufficiently large, this
approximation approaches the best rank-d approxi-
mation in expectation (Drineas and Mahoney, 2005).
To obtain W
S ,d
, we form the eigen-decomposition
(Ψ
◦
)
S S
= QDQ
T
(Q ∈R
s×s
orthogonal, D diagonal).
Taking
¯
d ≤ d to be the number of positive elements
in D, we haveW
S ,d
= Q
·,1..
¯
d
D
1..
¯
d,1..
¯
d
Q
T
·,1..
¯
d
(Q
·,1..
¯
d
de-
notes the first
¯
d columns of Q, and so on). The
pseudo-inverse is thus W
+
S ,d
= Q
·,1..
¯
d
D
−1
1..
¯
d,1..
¯
d
Q
T
·,1..
¯
d
,
and V satisfying (6) is therefore
V = (Ψ
◦
)
·S
Q
·,1..
¯
d
D
−1/2
1..
¯
d,1..
¯
d
. (7)
In practice, rather than defining d a priori, we can
choose a threshold 0 < ε
d
≪1, then choose the largest
integer d ≤ s such that D
dd
≥ ε
d
. (Therefore
¯
d = d.)
For each sample set S , this approach requires
O(ns
2
+ s
3
) operations for the creation and factoriza-
tion of (Ψ
◦
)
S S
, assuming that the evaluation of each
kernel entry takes O(n) time. Since our algorithm
only requires a single row of V in each iteration, the
computation cost of (7) can be amortized over itera-
tions: the cost is O(sd) per iteration if the correspond-
ing row of Ψ
◦
is available; O(ns+ sd) otherwise.
2.3.2 Feature Mapping Approximation
The second approach finds a mapping φ : R
n
→ R
d
that satisfies hφ
◦
(s),φ
◦
(t)i = E [hφ(s),φ(t)i] , where
the expectation is over the random variables that de-
termine φ. Such mapping can be constructed explic-
itly by random projections (Rahimi and Recht, 2008),
φ(t) =
r
2
d
cos(ν
T
1
t+ ω
1
),··· ,cos(ν
T
d
t+ ω
d
)
T
(8)
where ν
1
,...,ν
d
∈R
n
are i.i.d. samples from a distri-
bution with density p(ν), and ω
1
,...,ω
d
∈R are from
the uniform distribution on [0,2π]. The density func-
tion p(ν) is determined by the types of kernels. For
the Gaussian kernel k
◦
(s,t) = exp(−σks −tk
2
2
), we
have p(ν) =
1
(4πσ)
d/2
exp
−
||ν||
2
2
4σ
, from the Fourier
transformation of k
◦
.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
224

This approximation method is less expensive than
the previous approach, requiring only O(nd) opera-
tions for each data point (assuming that sampling of
each vector ν
i
∈ R
n
takes O(n) time).
2.4 Efficient Prediction
Given the solution (γ,b) of (PL), the prediction of a
new data point t ∈ R
n
can be made efficiently with-
out recoveringthe support vector coefficientα in (P2),
with cost as low as d/(no. support vectors) of the cost
of an exact-kernel approach.
For the feature mapping approximation, we can
simply use the decision function f (t) = w
T
φ(t) + b.
Using the definitions (1), (4), and γ := V
T
α, we obtain
f(t) = φ(t)
T
m
∑
i=1
α
i
φ(t
i
) + b = φ(t)
T
γ+ b.
The time complexity in this case is O(nd).
For the kernel matrix approximation approach, we
do not know φ(t), but from (3) we have
φ(t)
T
w+ b =
m
∑
i=1
α
i
φ(t)
T
φ(t
i
) + b ≈
m
∑
i=1
α
i
k
◦
(t
i
,t) + b.
To evaluate this, we set α
i
= 0 for all compo-
nents i /∈ S and s = d =
¯
d. Denoting the nonzero
subvector of α by α
S
, we have V
T
α = V
T
S ·
α
S
=
γ. So from (7) and (Ψ
◦
)
S S
= QDQ
T
we obtain
γ =
h
(Ψ
◦
)
S S
Q
·,1..
¯
d
D
−1/2
1..
¯
d,1..
¯
d
i
T
α
S
= D
1/2
1..
¯
d,1..
¯
d
Q
T
·,1..
¯
d
α
S
.
That is, α
S
= Q
·,1..
¯
d
D
−1/2
1..
¯
d,1..
¯
d
γ, which can be computed
in O(d
2
) time. Therefore, prediction of a test point in
this approach will take O(d
2
+ nd), including kernel
evaluation time.
3 THE ASSET ALGORITHM
Consider the general convex optimization problem
min
x∈X
f(x), D
X
:= max
x∈X
||x||
2
where f is a convex function and X ⊂ R
d
is a com-
pact convex set with the radius D
X
. We assume that
at any x ∈ X, we have available G(x;ξ), a stochas-
tic subgradient estimate depending on random vari-
able ξ ∈ Ξ ⊂ R
p
that satisfies E[G(x;ξ)] ∈ ∂ f(x). The
norm deviation of the stochastic subgradients is mea-
sured by D
G
defined as follows:
E[kG(x;ξ)k
2
2
] ≤ D
2
G
, ∀x ∈X,ξ ∈Ξ.
Iterate Update. We update iterates as follows:
x
j
= Π
X
(x
j−1
−η
j
G(x
j−1
;ξ
j
)), j = 1,2, . . . ,
Algorithm 1: ASSET Algorithm.
1: Set (γ
0
,b
0
) = (0, 0), (
˜
γ,
˜
b) = (0,0),
˜
η = 0;
2: for j = 1,2,...,N do
3: η
j
=
D
X
D
G
√
j
.
4: Choose ξ
j
∈ {1,...,m} at random.
5: V
ξ
j
·
=
(
V
ξ
j
·
for V as in (7), or
φ(t
ξ
j
) for φ(·) as in (8) .
6: Compute G
γ
j−1
b
j−1
;ξ
j
following Table 1.
7:
γ
j
b
j
= Π
X
γ
j−1
b
j−1
−η
j
G
γ
j−1
b
j−1
;ξ
j
.
8: if j ≥
¯
N then
9:
˜
γ
˜
b
=
˜
η
˜
η+ η
j
˜
γ
˜
b
+
η
j
˜
η+ η
j
γ
j
b
j
.
˜
η =
˜
η+ η
j
.
10: end if
11: end for
12: Define
˜
γ
¯
N,N
:=
˜
γ and
˜
b
¯
N,N
:=
˜
b.
where {ξ
j
}
j≥1
is an i.i.d. random sequence, Π
X
is
the Euclidean projection onto X, and η
j
> 0 is a step
length. For our problem (PL), we have x
j
= (γ
j
,b
j
),
and ξ
j
is selected to be one of the indices {1,2, . . . , m}
with equal probability, and the subgradient estimate is
constructed as shown in Table 1.
Feasible Sets. For classification, we set X =
{[γ,b]
T
∈ R
d+1
: ||γ||
2
≤ 1/
√
λ, |b| ≤ B} for suffi-
ciently large B. (The bound on kγk is from Shalev-
Shwartz et al. (2011, Theorem 1).) For regression
with ε-insensitive loss where 0 ≤ ε < kyk
∞
and y :=
(y
1
,y
2
,...,y
m
)
T
, we have a similar bound: kγk
2
≤
q
2(kyk
∞
−ε)
λ
(Lee and Wright, 2011, Theorem 1).
Estimation of D
G
. Using M samples indexed by ξ
(l)
,
l = 1,2,...,M, at the first iterate (γ
0
,b
0
), we estimate
D
2
G
as
1
M
∑
M
l=1
d
2
l
(||V
ξ
(l)
·
||
2
2
+ 1).
Our algorithm ASSET is summarized in Algo-
rithm 1. Convergence requires the later iterates to be
averaged; this begins at iterate
¯
N > 0.
3.1 Convergence
The analysis of robust stochastic approximation (Ne-
mirovski et al., 2009) provides theoretical support.
Theorem 1. Given the output ˜x
¯
N,N
= (
˜
γ
¯
N,N
,
˜
b
¯
N,N
)
T
of
Algorithm 1 and the optimal objective f(x
∗
), we have
E[ f( ˜x
¯
N,N
) − f(x
∗
)] ≤C(ρ)
D
X
D
G
√
N
where C(ρ) depends on ρ ∈ (0, 1) where
¯
N = ⌈ρN⌉.
ASSET: APPROXIMATE STOCHASTIC SUBGRADIENT ESTIMATION TRAINING FOR SUPPORT VECTOR
MACHINES
225
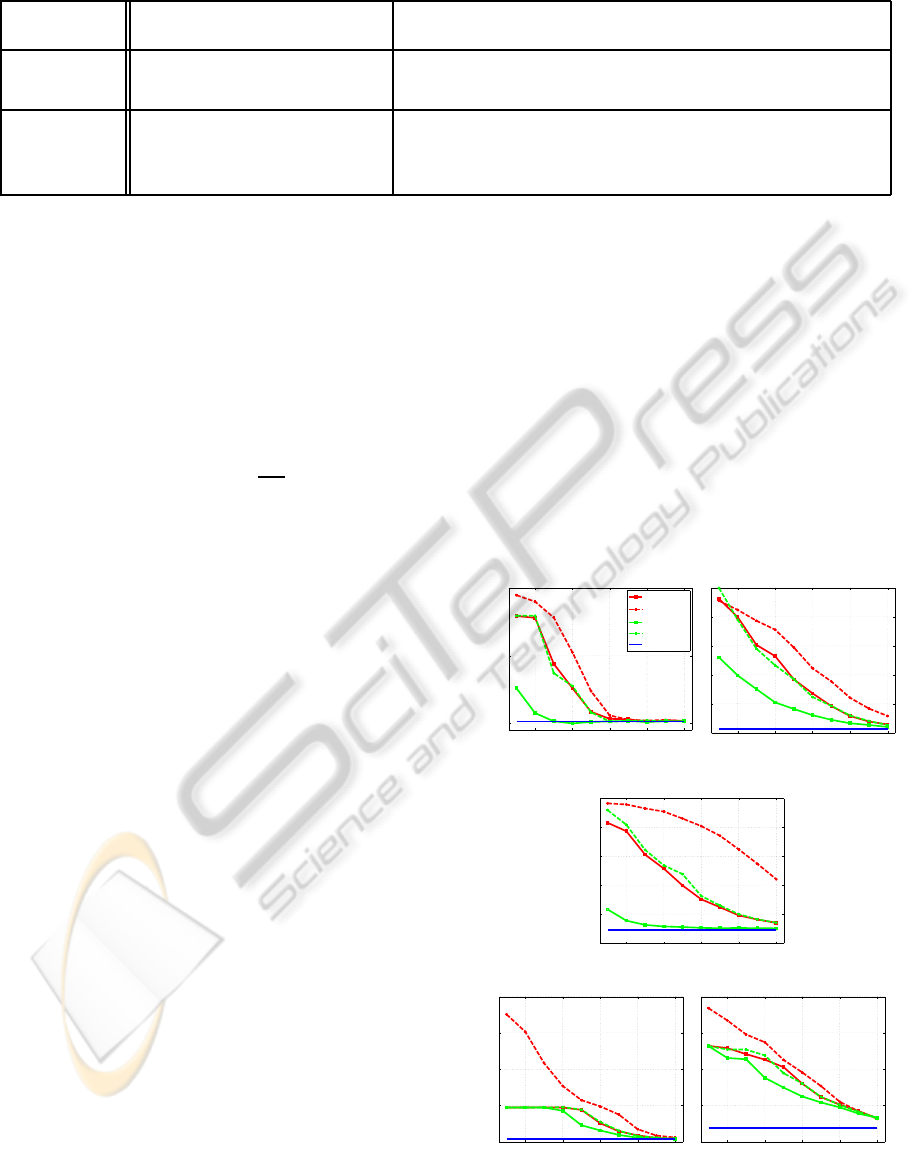
Table 1: Loss functions and their corresponding subgradients for classification and regression tasks.
Task Loss Function, ℓ Subgradient Estimate, G
γ
j−1
b
j−1
;ξ
j
Classification max{1−y(w
T
φ(t) + b), 0}
λγ
j−1
+ d
j
V
T
ξ
j
·
d
j
, d
j
=
(
−y
ξ
j
if y
ξ
j
(V
ξ
j
·
γ
j−1
+ b
j−1
) < 1
0 otherwise
Regression max{|y −(w
T
φ(t) + b)|−ε,0}
λγ
j−1
+ d
j
V
T
ξ
j
·
d
j
, d
j
=
−1 if y
ξ
j
> V
ξ
j
·
γ
j−1
+ b
j−1
+ ε,
1 if y
ξ
j
< V
ξ
j
·
γ
j−1
+ b
j−1
−ε,
0 otherwise.
When we omit the intercept b in (PL), f(x) be-
comes strongly convex. We can then use steplength
η
j
= 1/(λj), and omit the averaging, to achieve faster
convergence in theory. We refer to the resulting algo-
rithm after modification as ASSET
∗
. When λ ≈ 0,
convergence of ASSET
∗
can be quite slow unless we
have D
G
≈ 0 as well.
Theorem 2. Given the output x
N
and f(x
∗
), ASSET
∗
with η
j
= 1/(λ j) satisfies
E[ f(x
N
) − f(x
∗
)] ≤ max
(
D
G
λ
2
, D
2
X
)
/N.
4 COMPUTATIONAL RESULTS
We implemented Algorithm 1 based on the open-
source Pegasos code (ours is available at
http://
pages.cs.wisc.edu/
˜
sklee/asset/
.) The ver-
sions of our algorithms that use kernel matrix approx-
imation are referred to as ASSET
M
and ASSET
∗
M
,
while those with feature mapping approximation are
called ASSET
F
and ASSET
∗
F
. For direct comparisons
with other codes, we do not include intercept terms,
since some of the other codes do not allow such terms
to be used without penalization. All experiments with
randomness are repeated 50 times.
Table 2 summarizes the six binary classifica-
tion tasks we use, indicating the values of param-
eters λ and σ selected using SVM-Light to maxi-
mize the classification accuracy on each validation
set. (For
MNIST-E
, we use the same parameters as
in
MNIST
.) For the first five moderate-size tasks, we
compare all of our algorithms against four publicly
available codes: two cutting-plane methods CPNY
and CPSP, and the other two are SVM-Light and
LASVM. The original SVM-Perf (Joachims, 2006)
and OCAS (Franc and Sonnenburg, 2008) are not in-
cluded because they cannot handle nonlinear kernels.
For
MNIST-E
, we compare our algorithms using fea-
ture mapping approximation to LASVM.
For our algorithms, the averaging parameter is set
to
¯
N = m −100 for all cases (averaging is performed
for the final 100 iterates). The test error values are
computed using the efficient schemes of Section 2.4.
4.1 Effect of Approximation Dimension
To investigate the effect of kernel approximation di-
mension on prediction accuracy, we vary the dimen-
sion parameter s in Section 2.3 in the range [2, 1024],
with the eigenvalue threshold ε
d
= 10
−16
. Note that s
is an upper bound on the actual approximation dimen-
sion d for ASSET
M
, but is equal to d for ASSET
F
.
The codes CPSP and CPNY have a parameter similar
to s (as an upper bound of d). For purposes of com-
parison, we set that parameter to s. For the first five
2 4 6 8 10
0.15
0.2
0.25
log
2
(s)
Test error rate
ASSET
ASSET
on
CPSP
CPNY
SVM−Light
(a) ADULT.
2 4 6 8 10
0
0.1
0.2
0.3
0.4
0.5
(b) MNIST.
2 4 6 8 10
0
0.1
0.2
0.3
0.4
0.5
(c) CCAT.
2 4 6 8 10
0
0.1
0.2
0.3
0.4
(d) IJCNN.
2 4 6 8 10
0.1
0.2
0.3
0.4
0.5
(e) COVTYPE.
Figure 1: The effect of the approximation dimension to the
test error. The x-axis shows the values of s in log scale.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
226
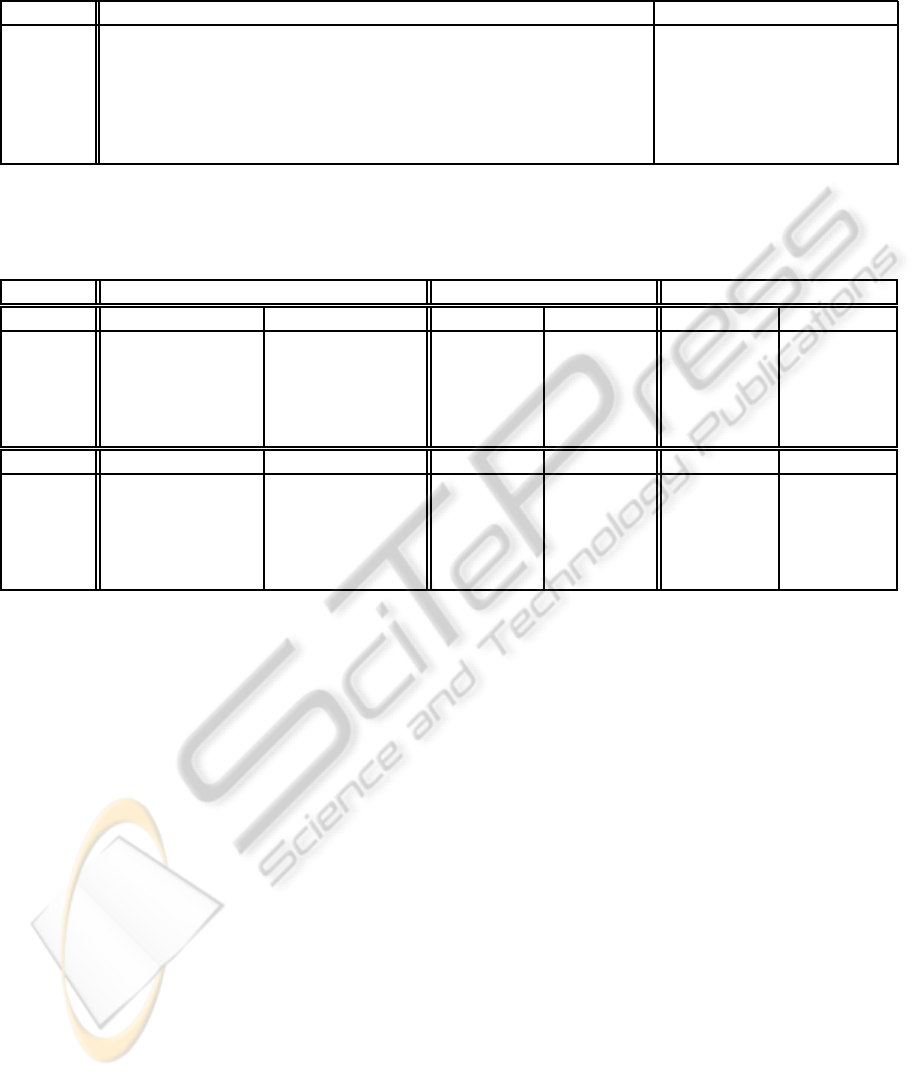
Table 2: Data sets and training parameters.
a
http://www.csie.ntu.edu.tw/∼cjlin/libsvmtools/datasets/,
b
http://leon.bottou.org/
papers/loosli-canu-bottou-2006/.
Name m (train) valid/test n (density) λ σ Note
ADULT
32561 8140/8141 123 (11.2%) 3.07e-08 0.001 UCI Repository.
MNIST
58100 5950/5950 784 (19.1%) 1.72e-07 0.01 Digits 0-4 vs. 5-9.
CCAT
78127 11575/11574 47237 (1.6%) 1.28e-06 1.0 RCV1-v2 collection.
IJCNN
113352 14170/14169 22 (56.5%) 8.82e-08 1.0 IJCNN 2001 Challenge
a
.
COVTYPE
464809 58102/58101 54 (21.7%) 7.17e-07 1.0 Forest cover type 1 vs. rest.
MNIST-E
1000000 20000/20000 784 (25.6%) 1.00e-08 0.01 An extended MNIST set
b
.
Table 3: Training CPU time (in seconds, h:hours) and test error rate (%) in parentheses. Kernel approximation dimension is
varied by setting s = 512 and s = 1024 for ASSET
M
, ASSET
∗
M
, CPSP and CPNY. Decomposition methods do not depend on
s, so their results are the same in both tables.
Subgradient Methods Cutting-plane Decomposition
s = 512 ASSET
M
ASSET
∗
M
CPSP CPNY LASVM SVM-Light
ADULT
23(15.1±0.06) 24(15.1±0.06) 3020(15.2) 8.2h(15.1) 1011(18.0) 857(15.1)
MNIST
97 (4.0±0.05) 101 (4.0±0.04) 550 (2.7) 348 (4.1) 588 (1.4) 1323 (1.2)
CCAT
95 (8.2±0.08) 99 (8.3±0.06) 800 (5.2) 62 (8.3) 2616 (4.7) 3423 (4.7)
IJCNN
87 (1.1±0.02) 89 (1.1±0.02) 727 (0.8) 320 (1.1) 288 (0.8) 1331 (0.7)
COVTYPE
697(18.2± 0.06) 586(18.2±0.07) 1.8h(17.7) 1842(18.2) 38.3h(13.5) 52.7h(13.8)
s = 1024 ASSET
M
ASSET
∗
M
CPSP CPNY LASVM SVM-Light
ADULT
78(15.1±0.05) 83(15.1±0.04) 3399(15.2) 7.5h(15.2) 1011(18.0) 857(15.1)
MNIST
275 (2.7±0.03) 275 (2.7±0.02) 1273 (2.0) 515 (2.7) 588 (1.4) 1323 (1.2)
CCAT
265 (7.1±0.05) 278 (7.1±0.04) 2950 (5.2) 123 (7.2) 2616 (4.7) 3423 (4.7)
IJCNN
307 (0.8±0.02) 297 (0.8±0.01) 1649 (0.8) 598 (0.8) 288 (0.8) 1331 (0.7)
COVTYPE
2259(16.5±0.04) 2064(16.5±0.06) 4.1h(16.6) 3598(16.5) 38.3h(13.5) 52.7h(13.8)
moderate-size tasks, we ran our algorithms for 1000
epochs (1000m iterations). The baseline performance
values were obtained by SVM-Light.
Figure 1 shows the results. Since ASSET
M
and
ASSET
∗
M
yield very similar results in all experiments,
we do not plot ASSET
∗
M
. (For the same reason we
show ASSET
F
but not ASSET
∗
F
.) For small σ values,
as in Figure 1(a), all codes achieve good classifica-
tion performance with small dimension. In other data
sets, the chosen values of σ are larger and the intrin-
sic rank of the kernel matrix is higher, so performance
continues to improve as s increases.
CPSP generally requires lower dimension than the
others to achieve the same prediction performance.
CPSP spends extra time to construct optimal ba-
sis functions, whereas the other methods depend on
random sampling. However, all approximate-kernel
methods including CPSP suffer considerably from the
restriction in dimension for
COVTYPE
.
4.2 Speed Comparison
Here we ran all algorithms other than ours with their
default stopping criteria. For ASSET
M
and ASSET
∗
M
,
we checked the classification error on the test sets ten
times per epoch, terminating when the error matched
the performance of CPNY. (Since this code uses a
similar Nystr¨om approximation of kernel, it is the one
most directly comparable with ours in terms of classi-
fication accuracy.) The test error was measured using
the iterate averaged over the 100 iterations immedi-
ately preceding each checkpoint.
Results are shown in Table 3 for s = 512 and
s = 1024. (LASVM and SVM-Light do not depend
on s and so their results are the same in both tables.)
Our methods are the fastest in most cases. Although
the best classification errors among the approximate
codes are obtained by CPSP, the runtimes of CPSP
are considerably longer than for our methods. In
fact, if we compare the performance of ASSET
M
with
s = 1024 and CPSP with s = 512, ASSET
M
achieves
similar test accuracy to CPSP (except for
CCAT
) but is
faster by a factor between two and forty.
It is noteworthy that ASSET
M
shows similar per-
formance to ASSET
∗
M
despite the less impressive the-
oretical convergence rate of the former. This is be-
cause the values of optimal parameter λ were near
zero, and thus the objective function lost the strong
convexity condition required for ASSET
∗
M
to work.
We observed similar slowdown of Pegasos and SGD
ASSET: APPROXIMATE STOCHASTIC SUBGRADIENT ESTIMATION TRAINING FOR SUPPORT VECTOR
MACHINES
227
0 1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
Time (h)
Test error
d=1024
ASSET
F
ASSET*
F
0 1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
Time (h)
Test error
d=4096
0 1 2 3 4 5 6 7
0
0.1
0.2
0.3
0.4
0.5
Time (h)
Test error
d=16384
Figure 2: Progress of ASSET
F
and ASSET
∗
F
to their com-
pletion (
MNIST-E
), in terms of test error rate.
when λ approaches zero for linear SVMs.
4.3 Large-scale Performance
We take the final data set
MNIST-E
and compare the
performance of ASSET
F
and ASSET
∗
F
to the online
SVM code LASVM. For a fair comparison, we fed the
training samples to the algorithms in the same order.
Figure 2 shows the progress on a single run of
our algorithms, with various approximation dimen-
sions d (which is equal to s in this case) in the range
[1024, 16384]. Vertical bars in the graphs indicate
the completion of training. ASSET
F
tends to con-
verge faster and shows smaller test error values than
ASSET
∗
F
, despite the theoretical slower convergence
rate of the former. With d = 16384, ASSET
F
and
ASSET
∗
F
required 7.2 hours to finish with a solu-
tion of 2.7% and 3.5% test error rate, respectively.
LASVM produced a better solution with only 0.2%
test error rate, but it required 4.3 days of computation
to complete a single pass through the same data.
5 CONCLUSIONS
We haveproposed a stochastic gradient framework for
training large-scale and online SVMs using efficient
approximations to nonlinear kernels, which can be ex-
tended easily to other kernel-based learning problems.
ACKNOWLEDGEMENTS
The authors acknowledge the support of NSF Grants
DMS-0914524 and DMS-0906818. Part of this work
has been supported by the German Research Founda-
tion (DFS) grant for the Collaborative Research Cen-
ter SFB 876: “Providing Information by Resource-
Constrained Data Analysis”.
REFERENCES
Bordes, A., Ertekin, S., Weston, J., and Bottou, L. (2005).
Fast kernel classifiers with online and active learning.
Journal of Machine Learning Research, 6:1579–1619.
Bottou, L. (2005). SGD: Stochastic gradient descent.
http://leon.bottou.org/projects/sgd.
Chapelle, O. (2007). Training a support vector machine in
the primal. Neural Computation, 19:1155–1178.
Drineas, P. and Mahoney, M. W. (2005). On the nystrom
method for approximating a gram matrix for improved
kernel-based learning. Journal of Machine Learning
Research, 6:2153–2175.
Franc, V. and Sonnenburg, S. (2008). Optimized cutting
plane algorithm for support vector machines. In Pro-
ceedings of the 25th International Conference on Ma-
chine Learning, pages 320–327.
Joachims, T. (1999). Making large-scale support vector ma-
chine learning practical. In Advances in Kernel Meth-
ods - Support Vector Learning, pages 169–184. MIT
Press.
Joachims, T. (2006). Training linear SVMs in linear time.
In International Conference On Knowledge Discovery
and Data Mining, pages 217–226.
Joachims, T., Finley, T., and Yu, C.-N. (2009). Cutting-
plane training of structural svms. Machine Learning,
77(1):27–59.
Joachims, T. and Yu, C.-N. J. (2009). Sparse kernel svms
via cutting-plane training. Machine Learning, 76(2-
3):179–193.
Lee, S. and Wright, S. J. (2011). Approximate stochastic
subgradient estimation training for support vector ma-
chines. http://arxiv.org/abs/1111.0432.
Nemirovski, A., Juditsky, A., Lan, G., and Shapiro, A.
(2009). Robust stochastic approximation approach to
stochastic programming. SIAM Journal on Optimiza-
tion, 19(4):1574–1609.
Nemirovski, A. and Yudin, D. B. (1983). Problem complex-
ity and method efficiency in optimization. John Wiley.
Rahimi, A. and Recht, B. (2008). Random features for
large-scale kernel machines. In Advances in Neu-
ral Information Processing Systems 20, pages 1177–
1184. MIT Press.
Shalev-Shwartz, S., Singer, Y., and Srebro, N. (2007). Pe-
gasos: Primal estimated sub-gradient solver for svm.
In Proceedings of the 24th International Conference
on Machine Learning, pages 807–814.
Shalev-Shwartz, S., Singer, Y., Srebro, N., and Cotter,
A. (2011). Pegasos: Primal estimated sub-gradient
solver for svm. Mathematical Programming, Series
B, 127(1):3–30.
Zinkevich, M. (2003). Online convex programming and
generalized infinitesimal gradient ascent. In Proceed-
ings of the 20th International Conference on Machine
Learning, pages 928–936.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
228
