
A RELATIONAL DATABASE AND KEY-VALUE STORE
COMBINED MECHANISM FOR MASSIVE HETEROGENEOUS
SENSOR DATA MANAGEMENT
Zhiming Ding
1
, Qi Yang
2
and Limin Guo
1
1
Institute of Software, Chinese Academy of Sciences, South Fourth Str. 4, Zhongguancun, Beijing 100190, P.R.China
2
National Center of ITS Engineering & Technology, Xitucheng Road 8, Beijing 100088, P.R.China
Keywords: Sensor Data Management, Spatial-Temporal Data, Massive Data Processing, Cloud Data Management.
Abstract: Massive sensor data management is an important issue in large-scale sensor based systems such as the
Internet/web of Things. However, existing relational database and cloud data management techniques are
inadequate in handling large-scale sensor sampling data. On the one hand, relational databases can not
efficiently process frequent data updates caused by sensor samplings. On the other hand, current cloud data
management mechanisms are largely key-value stores so that they can not support complicated spatial-
temporal computation involved in sensor data query. To solve the above problems, we propose a Relational
Data-Base and Key-Value store combined Cloud Data management (“RDB-KV CloudDB”) framework, in
this paper. The experimental results show that the RDB-KV CloudDB can provide satisfactory query
processing and sensor data updating performances in large scale sensor-based systems.
1 INTRODUCTION
Massive sensor data management is an important
issue in large-scale sensor based systems such as the
Internet/web of Things. However, existing relational
database and cloud data management techniques are
inadequate in handling large-scale centralized sensor
sampling data. On the one hand, relational databases
(
Güting, Almeida, and Ding, 2006) and middle-ware
systems (
Gurgen, Roncancio, Labbé, et al., 2008) can
not efficiently process frequent data updates caused
by sensor samplings. On the other hand, current
cloud data management mechanisms (
Abadi, 2009)
are largely key-value stores so that they are not
suited for sensor data management. Detailed reasons
are as follows:
(1) Sensor data are highly heterogeneous since
there could be various kinds of sensors even in a
same sensor-based system. Different kinds of
sensors can have different semantics and data
formats, and it is important to keep the semantics of
the data for querying and for interoperation.
(2) Spatial-temporal attribute is intrinsic for
sensor data. Every sampling value corresponds to a
sampling location and a sampling time, which are
crucial information for query processing in sensor-
based systems. In a lot of cases, data are queried
through spatial-temporal constrains and other
complicated conditions, not through keyword
searches on identifiers of sensors.
(3) More information about a monitored object is
contained in the sequence of its sampling values
than in individual sampling values. Queries about
the state of the monitored object can not be
answered simply through keyword matches, since
data are sampled discretely and the chances for the
querying time to coincide with the sampling time are
very low. To answer queries correctly and
efficiently, we need to organize the sampling data of
the same object into a sequence and answer the
queries through interpolation.
(4) The sensor sampling data to be managed are
dynamically changing stream data. The data are
always changing because of insertions of new
sampling values and deletions of obsolete sampling
values.
To support massive heterogeneous sensor data
management, we propose a Relational DataBase and
Key-Value store combined Cloud Data management
(“RDB-KV CloudDB”) framework, in this paper.
The overall architecture of the RDB-KV CloudDB is
depicted in Figure 1.
151
Ding Z., Yang Q. and Guo L..
A RELATIONAL DATABASE AND KEY-VALUE STORE COMBINED MECHANISM FOR MASSIVE HETEROGENEOUS SENSOR DATA MANAGEMENT.
DOI: 10.5220/0003800301510154
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 151-154
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

moving video
analysis sensors
video analysis
sensors
telemetric
analysis sensors
geological
sensors
hydrological
sensors
traffic sensors
RDB-KV NodeDB
Sampling Receivers
Master Node
Sensor Deployment
La
y
er
Data Storage
La
y
er
RDB-KV Cloud Storage
Figure 1: Architecture of the RDB-KV CloudDB.
The RDB-KV Cloud Storage adopts a two-
layered architecture. The actual sensor sampling data
are stored at the leaf nodes, while the master node
stores global indices and global catalogues of the
whole system. The cloud can not only support
keyword searches, but also support spatial-temporal
queries, sampling sequence based interpolation
queries, and other complicated queries.
Each leaf node of the RDB-KV Cloud Storage is
a database (denoted as “RDB-KV NodeDB” in
Figure 1) which can manage heterogeneous sensor
data in a uniformed manner through a set of data
types and operators.
The root nodes of the RDB-KV Cloud Storage
include a coordinator (denoted as “Master Node” in
Figure 1, which is a RDB-KV NodeDB augmented
with global indices and catalogues) for global query
processing, and a group of servers for receiving and
distributing new sensor sampling values (denoted as
“Sampling Receivers” in Figure 1).
The system has global distributed indices built
on RDB-KV NodeDBs and the master node so that
both SQL queries and keyword searches can be
supported efficiently.
2 RDB-KV NODE DATABASE
In this section, we describe how each leaf node of
the RDB-KV Cloud Storage works to manage
heterogeneous sensor data. In an RDB-KV NodeDB,
multiple sampling values of a same object form a
“sampling sequence”. Through related data types,
operators, and indices, the sampling sequence data
can be managed and queried at the database kernel
efficiently.
In describing the data types and operators of the
RDB-KV NodeDB, we use the notation introduced
in (
Güting, Almeida, and Ding, 2006) and assume that
the standard data types, spatial data types, and their
related operators have already been designed and
implemented.
2.1 Data Types for Expressing Sensor
Data in Databases
In this subsection, we first define the data types for
expressing individual sensor sampling values, and
then define the sampling sequence data type, which
is the general format for organizing and managing
the sampling data. Through these data types, the
database can express and present heterogeneous
sensor sampling values in a uniformed manner.
Definition 1 (Sampling Value) A sampling
value, denoted as SamplingValue, is defined as:
SamplingValue = (t, (x, y), npos, schema, value)
where t is the time instant when the value is
sampled; (x, y) and npos are the Euclidean position
and the network position where the value is
sampled; schema and value are the format and the
actual value of the sampling respectively.
Through the SamplingValue data type, we can
express heterogeneous sensor sampling data in a
uniformed manner.
A sampling value can have multiple components.
For instance, a GPS sampling value can have 2
components: longitude and latitude. Components of
a sampling value can be expressed through the
Sampling Value Component data type.
Definition 2 (Sampling Value Component) A
sampling value component, denoted as
SamplingComponent, can be defined as follows:
SamplingComponent = (cSchema, cValue)
where cSchema and cValue are the schema and the
value of the component respectively.
Definition 3 (Sampling Sequence) For a certain
monitored object, its sampling sequence is
composed of all sampling values of the object for a
certain time period, ordered by sampling time. Since
the sampling values of the same object share the
same schema, we can define the sampling sequence
data type as follows:
SamplingSequence=(schema, (t
i
, ((x
i
, y
i
), npos
i
,
value
i
, flag
i
))
n
i 1=
)
where schema describes the format of the sampling
values; t
i
, (x
i
, y
i
), npos
i
, value
i
are the time, the
Euclidean position, the network position, and the
actual value of the ith sampling respectively; and
flag
i
indicates whether the ith sampling value is a
“breaking point” in the sequence.
For static objects whose positions do not move,
their sampling sequence can be further simplified as
SENSORNETS 2012 - International Conference on Sensor Networks
152

follows (flag
i
is still needed to indicate the situation
when the object is temporarily suspended):
SamplingSequence = (schema, (x, y), npos, (t
i
,
value
i
, flag
i
)
n
i 1=
)
The above two formats for sampling sequences
are a little bit different and the database can
differentiate them automatically.
With the above data types, we can create tables
for storing sensor sampling data. For instance:
Create Table IoTData
(ObjectID: String, ObjectType: String,
Owner: String; DepoyedTime: Instant,
Samplings: SamplingSequence)
2.2 Sensor Querying Operators
The data types allow us to express sensor sampling
data in databases. To query the sensor data, we need
to define a set of operators based on these data types.
The most important operator based on the
SamplingSequence data type is the atInstant
operator which computes the state of the monitored
object at a given time instant. The signature of the
operator is as follows:
atInstant:
SamplingSequence × Instant → SamplingValue
The operator has two input arguments which are
of SamplingSequence and Instant data types
respectively, and outputs a value of the
SamplingValue data type. During the computation,
interpolation may be needed so that the database can
answer queries about the states of monitored objects
at any time during the monitored time periods.
To facilitate the appending of new sampling
values to sampling sequences, we define the
samplingAppend operator with the following
signature:
samplingAppend:
SamplingSequence×SamplingValue×Bool→
SamplingSequence
The operators based on the SamplingValue data
type mainly include 3 data projection operators,
getInstant, getPosition, getNetPosition, and a data
extraction operator, getComponent. Their
signatures are as follows:
getInstant: SamplingValue → Instant
getPosition:
SamplingValue → Point
SamplingSequence → Point (for static objects)
getNetPosition: SamplingValue → String
getComponent:
SamplingValue×integer → SamplingComponent
Besides, we upgrade all the relevant standard
operators (such as +,
−, ×, /, <, =, >) and spatial
operators (such as inside, intersect, touches,
distance, direction, overlap) through “lifting”
(
Güting, Almeida, and Ding, 2006) so that the
SamplingComponent data type can interoperate with
other standard and spatial data types through these
operators. For instance, the “=” operator can be
“lifted” as follows (assume that “BASE” and
“SPATIAL” are the sets of standard data types and
spatial data types respectively):
=: α × β→ Bool
where α, β ∈ {samplingComponent} ∪ BASE ∪
SPATIAL.
In the RDB-KV NodeDB, queries are submitted
in the SQL format no matter whether they are
normal SQL queries or keyword searches. For
keyword searches, we define the following operator:
keySearch: string → set(tuple)
With the above operators, we can make various
kinds of queries in the SQL format. Let’s see some
examples.
3 RDB-KV CLOUD DATA
MANAGEMENT FRAMEWORK
In a sensor-based system, there could be huge
numbers of sensors monitoring the states of various
kinds of objects. To manage the sensor sampling
data efficiently, we need large numbers of RDB-KV
NodeDBs to work together and to form an RDB-KV
Cloud Storage system. The RDB-KV Cloud Storage
assumes a two-layered structure, with the leaf nodes
storing real sensor data and the master node storing
global indices and catalogues for global query
processing. The architecture of the RDB-KV Cloud
Storage is shown in Figure 2.
Figure 2: Architecture of the RDB-KV Cloud Storage.
In the RDB-KV Cloud Storage, both the master
node and the leaf nodes are RDB-KV NodeDBs,
with the master node having some additional
modules for global indexing and query processing.
Master Node
Leaf
N
odes
Sampling Receivers
A RELATIONAL DATABASE AND KEY-VALUE STORE COMBINED MECHANISM FOR MASSIVE
HETEROGENEOUS SENSOR DATA MANAGEMENT
153
3.1 Data Distribution Strategies
In the RDB-KV CloudDB, all new sampling values
are sent to the Sampling Receivers (see Figure 2)
first, and then are distributed among leaf nodes
according to their geographical attributes. In the
system, each leaf node site corresponds to a certain
area (called the “service area” of the node, denoted
as α(site)), and data are distributed among the leaf
nodes according to their geographical attributes. The
master node and the sampling receivers keep the
Service Area Partition Table (SAP-Table).
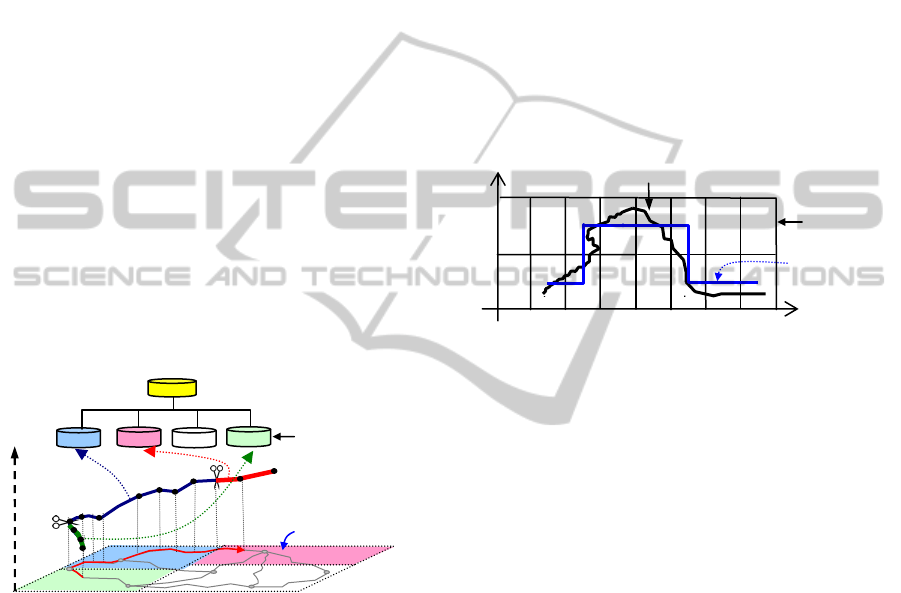
For an arbitrary object obj, if it is a static object,
then it corresponds to only one tuple which is saved
at the leaf node whose service area covers the
location of obj. If obj is a moving object, then it
corresponds to multiple replicated tuples − The basic
information (including attributes other than
“Samplings”, that is, ObjectID, ObjectType, Owner,
DeployedTime, see Subsection 2.1 for the schema of
the IoTData table) are replicated among all leaf
nodes through whose service areas obj has travelled,
while its “Samplings” attribute is partitioned and
kept in a distributed manner among these nodes.
Figure 3 shows how the “Samplings” attribute of obj
is distributed
Figure 3: Distribution of the “Samplings” value.
3.2 Global and Local Indices
In sensor-based systems, queries about individual
sensors can be roughly divided into three categories:
keyword queries, spatial-temporal queries, and
value-based queries.
The first kind of queries can be supported
efficiently through the Global Keyword B-Tree
Index which indices the keywords extracted from the
database records. The index is a distributed one
which involve all the leaf nodes of the RDB-KV
cloud to organize the (keyword, siteID) pairs.
For the second kind of queries, we need the
Sensor-Sampling-Sequence Spatial-Temporal Tree
(S4T-Tree) to index the spatial-temporal attribute of
the sampling sequence data. S4T-Tree actually
consists of two trees, a spatial R-Tree which indices
the locations of static objects and a Grid-Sketched
Spatial-Temporal R-Tree (GSSTR-Tree) which
indices the time-dependent locations (or
“trajectories”) of moving objects whose locations
change over time.
The third kind of queries is very important in
real-world applications. For instance, “query all the
sensors whose temperatures are above 40 °C at time
t”. To support this kind of queries, we need to build
a Grid-Sketched Value-Temporal R-Tree for every
kind of sensors. The records of the index are shown
in Figure 4. From the figure we can see that the
Grid-Sketched Value-Temporal R-Tree can greatly
reduce the number of records and the updating
frequency in indexing sampling sequences.
Figure 4: Grid-Sketched Value-Temporal R-Tree.
4 CONCLUSIONS
In this paper, the RDB-KV CloudDB mechanism is
proposed which can support spatial-temporal queries,
value-based queries and keyword queries efficiently.
ACKNOWLEDGEMENTS
The work is supported by NSFC under grant
numbers 91124001 and 60970030.
REFERENCES
Güting R. H., Almeida V. T., Ding Z., 2006. Modeling
and Querying Moving Objects in Networks, The
VLDB Journal, 15(2), pp.165-190.
Gurgen L., Roncancio C., Labbé C., Bottaro A., Olive V.,
2008. SStreaMWare: a service oriented middleare for
heterogeneous senser data management. In ICPS’08,
The 2008 International Conference on Pervasive
Services, Sorrento, Italy, 6-10 July 2008. New York:
ACM.
Abadi D. J., 2009. Data Management in the Cloud:
Limitations and Opportunities. IEEE Data
Engineering Bulletin. 32(1), pp 3-12.
s
ite
1
s
ite
2
s
ite
3
s
ite
4
M
aste
r
N
ode
t
α
(
s
ite
1
)
α
(
site
2
)
α
(
site
4
)
α
(
s
ite
3
)
Service Areas
L
ea
f
N
ode
s
Grid Cells
Grid-Sketched
Sampling
Sequence
Sensor Sampling value
Time
Original Sampling Sequence
SENSORNETS 2012 - International Conference on Sensor Networks
154
