
A MULTIAGENT SYSTEM SUPPORTING SITUATION AWARE
INTERACTION WITH A SMART ENVIRONMENT
Davide Cavone, Berardina De Carolis, Stefano Ferilli and Nicole Novielli
Dipartimento di Informatica, Universita’ di Bari, Bari, Italy
Keywords: Smart environment, Multi Agent System, User modeling, Pervasive interaction.
Abstract: Adapting the behavior of a smart environment means to tailor its functioning to both context situation and
users’ needs and preferences. In this paper we propose an agent-based approach for controlling the behavior
of a Smart Environment that, based on the recognized situation and user goal, selects a suitable workflow
for combining services of the environment. We use the metaphor of a butler agent that employs user and
context modeling to support proactive adaptation of the interaction with the environment. The interaction is
adapted to every specific situation the user is in thanks to a class of agents called Interactor Agents.
1 INTRODUCTION
Users of a smart environment often have contextual
needs depending on the situation they are in. In
order to satisfy them, it is important to adopt an
approach for personalizing service fruition according
to the user situation. Moreover it is important to
make the interaction with services easy and natural
for the user. To this aim we propose an approach
based on software agents able to provide Smart
Services, i.e. integrated, interoperable and
personalized services accessible through several
interfaces available on various devices present in the
environment in the perspective of pervasive
computing. We adopt the metaphor of a butler in
grand houses, who can be seen as a household
affairs manager with duties of a personal assistant,
able to organize the housestaff in order to meet the
expectations of the house inhabitants. Starting from
the results of a previous project (De Carolis et al.,
2006), we have developed a MAS in which the
butler agent recognizes the situation of the user in
order to infer his possible goals. The recognized
goals are then used to select the most suitable
workflow among a set of available candidates (Yau
and Liu, 2006). Such a selection is made by
semantically matching the goals, the current
situation features and the effects expected by the
execution of the workflow. Once a workflow has
been selected, its actions are executed by the effector
agents. Then the system guides interactively the user
in finding, filtering and composing services (Kim,
2004), exploiting a semi-automatic approach: the
user may change the execution of the selected
workflow by substituting, deleting, or undoing the
effects of some services. Moreover, the butler is
able to learn about situational user preferences but it
should leave to its “owner” the last word on critical
decisions (Falcone and Castelfranchi, 2001). To this
aim, the butler agent must be able to interpret the
user’s feedback appropriately, using it to revise: (i)
the knowledge about the user, with respect to his
preferences and goals in a given situation, and (ii)
the workflow or the services invoked in it (Cavone
et al., 2011).
One of the most important features of our
architecture is the presence of a class of interactor
agents that are responsible for implementing several
kinds of interfaces according to contextual factors
and to the user preferences.
2 THE PROPOSED MAS
We propose an agent-based system that supports the
user in daily routines but also in handling
exceptional situations that may occur. As a main
task, the butler must perceive the situation of the
house and coordinate the housestaff. To this aim we
have designed the following classes of agents:
Sensor Agents (SA): they are used for providing
information about context parameters and features
(e.g., temperature, light level, humidity, etc.) at a
higher abstraction level than sensor data.
67
Cavone D., De Carolis B., Ferilli S. and Novielli N..
A MULTIAGENT SYSTEM SUPPORTING SITUATION AWARE INTERACTION WITH A SMART ENVIRONMENT.
DOI: 10.5220/0003802800670072
In Proceedings of the 2nd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2012), pages 67-72
ISBN: 978-989-8565-00-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

Butler Agent (BA): its behavior is based on a
combination of intelligent reasoning, machine
learning, service-oriented computing and semantic
Web technologies for flexibly coordinating and
adaptively providing smart services in dynamically
changing contexts;
Effector Agents (EA): each appliance and device
is controlled by an EA that reasons on the
opportunity of performing an action instead of
another in the current context.
Interactor Agents (IA): they are in charge of
handling interaction with the user;
Housekeeper Agent (HA): it acts as a facilitator
among the agents.
All agents are endowed with two main behaviors,
reasoning and learning, whose implementation
depends on the specific kind of agent.
The reasoning behavior interprets the input and
processes it according to its specific role. Due to the
complexity of most real-world environments this
requires powerful kinds of reasoning and knowledge
management, such as deduction, abduction and
abstraction (Esposito et al., 2006). We use a logic
language to express all the items included in the
knowledge base of our agents. In particular, the need
to handle relationships among several entities and
possible situations calls for the first-order logic
setting. An advantage of this setting is that the
knowledge handled and/or learned by the system can
be understood and checked by humans.
The learning behavior, on the other hand, is used
by an agent to refine and improve its future
performance through Inductive Logic Programming
(ILP) (Muggleton, 1991), which is particularly
powerful, and suitable for the specific needs of
adaptivity posed by the present application. In fact,
ILP allows an incremental approach to learning new
information which is mandatory in our case, because
the continuous availability of new data and the
evolving environment cannot be effectively tackled
by static models, but require continuous adaptation
and refinement of the available knowledge. An
incremental ILP system that is able to exploit
different kinds of inference strategies and hence fits
the above requirements, is described in (Esposito et
al., 2006) also abstraction and abduction theories can
be learned automatically (Ferilli et al. 2005).
Regardless of the specific role played by an
agent, its behaviors strictly cooperate in the same
way. Reasoning uses the agent’s knowledge to
perform inferences that determine how the agent
achieves its objectives. Learning exploits possible
feedback on the agent’s decisions to improve that
knowledge, making the agent adaptive to the
specific user needs and to their evolution in time.
These agents coordinate themselves as follows:
cyclically, or as an answer to a user action, the butler
runs its reasoning model about the user. According to
the situation provided by the appropriate SAs, the
butler infers and ranks which are the possible user
goals and needs. Then, the butler selects the
workflow associated with a specific goal by
matching semantically the goal with all the Input,
Output, Pre-Condition and Effect (IOPE)
descriptions (Martin, 2007) of the workflows stored
in a workflow repository. Once the most appropriate
workflow has been selected and activated, it is
necessary to select the services/actions to be invoked
among those available in the environment. This
process is performed through semantic matchmaking,
as well. Therefore, each workflow is planned by
initially describing its execution flow and, when
needed, the IOPE features of all Web services
included in the process. Then, the matchmaker
module is responsible of performing the semantic
match between the workflow predefined requests and
the available semantic Web services, which are listed
in a Semantic Web Services Register (SWSR)
according to the IOPE standard representation
(Meyer, 2007). Hence, the workflow services are
invoked dynamically, matching the user’s needs in
the most effective way (see Section 3.1 for more
details). As regards predicates of Web Services, both
simple and complex Web Services will be
implemented according to the standard Web
Ontology Language for Services (OWL-S). We will
sometimes refer to the OWL-S ontology as
a language for describing services that enables
automatic service discovery, invocation, composition
and execution monitoring. In particular, the
composition of complex services from atomic
services is based on their pre-conditions and post-
conditions.
A detailed description of the agents behaviors
and the workflow composition was presented in
(Cavone et al., 2011).
3 AGENT CLASSES
This section describes the different agent classes,
showing examples that illustrate how they work. The
following scenario will be assumed:
It’s evening and Jim, a 73 y.o. man, is at home alone. He has
a cold and fever. He is a bit bored since he cannot go
downtown and drink something with his friend, like he does
every evening. Jim is sitting on the bench in his living room in
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
68

front of the TV, holding his smartphone. The living room is
equipped with sensors, which can catch sound/noise in the
air, time, temperature, status of the window (open/close) and
of the radio and TV (on/off), and the current activity of the
user, and with effectors, acting and controlling windows, radio
and TV and also the execution of digital services that may be
visualized on communication devices, as for instance the TV.
The smartphone allows Jim to remotely control the TV.
Moreover, the house is equipped with several interaction
devices through which the SHE communicates with the user
by implementing different interaction metaphors. Examples of
such devices, employed for controlling the house appliances,
are the touch screens on the fridge or on mirrors, the
smartphone that the users usually brings with him and a
socially intelligent robot that is able to move around in the
home and to engage natural language dialogue with its
inhabitants.
3.1 Sensor Agents
Sensor Agents are in charge of controlling a set of
sensors that are suitably placed in the environment
for providing information about context parameters
and features (e.g. temperature, light level, humidity,
etc.), such as meters to sense physical and chemical
parameters, microphones and cameras to catch what
happens, indicators of the status of various kinds of
electric and/or mechanical devices. The values
gathered by the physical sensors are sent in real-time
to the reasoning behavior of the associated SA,
which uses abstraction to strip off details that are
known but useless for the specific current tasks and
objectives. For instance, the SA providing
information about temperature will abstract the
centigrade value into a higher level representation
such as “warm”, “cold”, and so on. This abstraction
process may be done according to the observed
specific user’s needs and preferences (e.g. the same
temperature might be cold for a user but acceptable
for another). For instance, let us denote the fact that
the user Y is cold in a given situation X with
cold(X,Y). This fact can be derived from the specific
temperature using a rule of the form:
cold(X,Y) :- temperature(X,T), T<18, user(Y), present(X,Y),
jim(Y).
(it is cold for user Jim if he is present in a situation in
which the temperature is lower than 18 degrees). In
turn, the above rule can be directly provided by an
expert (or by the user himself), or can be learned (and
possibly later refined) directly from observation of
user interaction (Ferilli et al., 2005).
3.2 The Butler Agent
The Butler Agent recognizes user goals starting from
percepts received by SAs and composes a smart
service corresponding to a workflow that integrates
elementary services according to the particular
situation.
The reasoning of this agents mainly involves
deduction, to draw explicit information that is
hidden in the data, and abduction, to be able to
sensibly proceed even in situations in which part of
the data are missing or otherwise unknown.
However, in some cases, it may also use abstraction,
which is performed at a higher level than in SAs.
Each observation of a specific situation can be
formalized using a conjunctive logic formula under
the Closed World Assumption (what is not explicitly
stated is assumed to be false), described as a snapshot
at a given time. A model, on the other hand, consists
of a set of Horn clauses whose heads describe the
target concepts and whose bodies describe the pre-
conditions for those targets to be detected. For
instance, the following model might be available:
improveHealth(X) :- present(X,Y), user(Y), has_fever(Y).
improveHealth(X):-
present(X,Y), user(Y), has_headache(Y), cold(X,Y).
improveHealth(X) :- present(X,Y), user(Y), has_flu(Y).
improveMind(X) :- present(X,Y), user(Y), sad(Y).
improveMind(X) :- present(X,Y), user(Y), bored(Y).
On the other hand, a sample observation might be:
morning(t0),closedWindow(t0),present(t0,j), jim(j), user(j),
temperature(t0,14), has_flu(j), bored(j).
Reasoning infers that Jim is cold: cold(t0,j). Being all
the preconditions of the first and fourth rules in the
model satisfied by this situation for X = t0 and Y =
jim, the user goals improveHealth and improveMind
are recognized for Jim at time t0, which may cause
activation of suitable workflows aimed at attaining
those results.
The BA reasons not only on goals but also on
workflows. Indeed, once a goal is triggered, it selects
the appropriate workflow by performing a semantic
matchmaking between the semantic IOPE description
of the user's high-level goal and the semantic profiles
of all the workflows available in the knowledge base
of the system (W3C, 2004). As a result, this process
will produce from zero to n workflows that are
semantically consistent with the goal, ranked in order
of semantic similarity with the goal.
For instance, as shown in Figure 1, the semantic
matchmaking process leads to two different
workflows associated, respectively, to the two high-
level goals improveHealth and improveMind
previously recognized. The semantic matchmaking
process starts from these goals and leads to the
desired workflow.
A MULTIAGENT SYSTEM SUPPORTING SITUATION AWARE INTERACTION WITH A SMART ENVIRONMENT
69
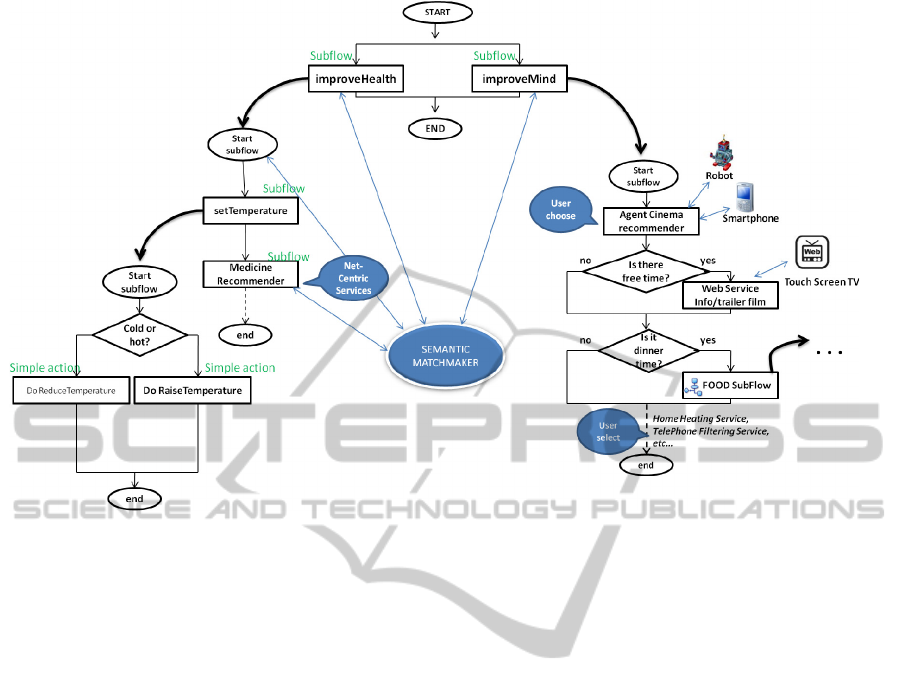
Figure 1: An example of a Smart Service Workflow composed by the Butler Agent.
The semantic matchmaking can also be used
within a workflow, to find both the most appropriate
subflows and services. In the simplest case, indeed,
the best workflow may consist of a sequence of
actions. Hence, the behavior implementation allows
to deal with complex workflows consisting of a flow
of actions and other sub-goals corresponding to
subflows, which are again processed according to
the matchmaking phase described above. In our
example, the main workflow includes two goals that
need to be executed by selecting two different
subflows corresponding, respectively, to each goal:
improveHealth and improveMind. These subflows
include both simple actions, that can be directly
executed, and subflows that need to be satisfied, such
as setTemperature. In this case, the BA will process
the information collected by the temperature sensors
in order to understand whether to raise or reduce the
environment temperature.
This hierarchical matchmaking process stops
when the resulting workflow is composed of simple
goals that can be directly satisfied by invoking a net-
centric service or through simple actions performed
on the effectors. In both cases, the BA asks to the HA
which EAs can satisfy each planned action and sends
a specific request to the EA in charge for handling
actions regarding changes of a particular parameter
(e.g., temperature, light, etc.). In particular, when the
goal satisfied by a workflow (or by part of it) regards
a communicative action, its execution is delegated to
the IAs. In this specific case, the HA returns to the
BA the list of agents that are responsible for
implementing the interaction with the user through
different modalities (e.g. on a touch screen, on the
smartphone or by using the social robot present in the
smart environment).
3.3 The Effector Agents
Effector agents are in charge of taking appropriate
decisions about actions to be executed on the
environment appliances and devices in order to fulfil
simple goals determined in the workflow by the BA.
To best satisfy the user needs, these agents
reason about different possible solutions to attain the
same goal. For instance, if the goal is reducing the
temperature, the EA in charge of temperature control
may decide whether turning on air conditioning or
opening the window; additionally, it decides how to
control those devices (in the former case, which fan
speed to select; in the latter case, how widely the
window must be opened). If the goal is reminding
Jim to take medicines and this can be done through a
Web service accessible on TV, the EA invokes it.
4 THE INTERACTOR AGENTS
Interactor Agents (IAs) satisfy the goal of interacting
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
70
with the user. Their behavior mainly consists in
executing communicative actions through different
interaction modalities and with different
communicative goals. IAs choose the most suitable
interaction metaphor according to the situation and to
the user’s needs and preferences. There are several
communicative goals that IAs may carry out:
Information Seeking: IAs exploit interaction with the
user to get hints on how to attain a simple goal and,
based on this, possibly learn new preferences of that
user with respect to the given context and situation,
in order to continuously and dynamically improve
adaptation.
Information Providing: this task involves the delivery
of information to the user when he requests
explanations about the SHE appliances behavior or
about the decision to include some specific subflows
in the main workflow built by the BA. E.g., referring
to the previous scenario, the user may ask the robot
to provide more justification for choosing a given
medicine. In this case the social robot may intervene
explaining to the user why that drug is suited for his
problem by showing the advantages of taking it. This
task may be seen as a simpler version of the
persuasion task described in (De Carolis et al., 2009).
Remind: this task may be implemented through
different interaction devices. The BA may choose the
more appropriate one according to the user
preferences and to the specific situation. For
example, if the object of the reminder is to take a
medicine, it might be useful to provide a reminder on
the smartphone.
4.1 Exploiting Pervasive Interaction
The general interaction behavior of the IA is
implemented according to the specific appliances to
which the IA instances are associated. The
interaction devices are distributed in the
environment and are selected according to the
specific interaction task to be carried out, the context
(e.g. how close is the device with respect to the
position of the user in the SHE), and the user
preferences.
Let’s refer to the scenario described earlier. Jim
is sitting in front of the TV and is bored, hence the
BA builds a workflow in order to satisfy the
ImproveMind goal. Starting from this data and the
information describing the situation, the SHE infers
that a possible goal of Jim is to WatchTV. This will
be obtained as a subflow of
ImproveMind through the
semantic matchmaking process, as described in the
previous section. It selects the workflow, shown in
Figure 1, for satisfying this goal according to the
context condition.
The BA starts the execution of the workflow and,
as a first service, it recommends to Jim a set of
movies that could be of interest to him . Jim may
accept the proposed service, or refuse it and select
another one. This interactive task is delegated by the
BA to the IA associated to the smartphone, since it is
the device that Jim can access immediately. Let’s
suppose that Jim accepts and selects the
recommended movie. Then, since it is almost dinner
time, the smart service recommends his favourite
take-away food, sushi. In this way, using the
interface on TV, Jim may evaluate the agent
proposal. He may accept, refuse or modify the
proposed services choosing among several other
services that are available in that situation.
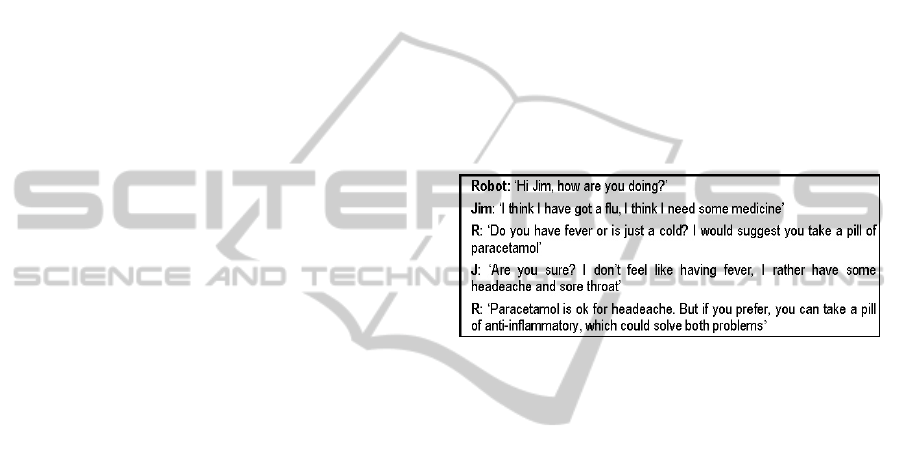
Figure 2: An example of interaction with the social robot.
Another example is provided by the subflow
called ‘
Medicine Recommender’ included in the
workflow in Figure 1. It may be satisfied differently
according to the specific situation of the user. Let’s
suppose, for example, that the information about the
user’s disease is not complete, that is the BA knows
that the user needs to improve his health because he
has got a flu but it is necessary to decide which is
the most suitable drug for him to take. In such a
situation, it is necessary to further investigate the
user's physical state in order to select the most
appropriate drug to suggest him. In Figure 2 we
provide an example of the interaction with the social
intelligent robot present in the house.
5 CONCLUSIONS AND FUTURE
WORK
This contribution shows a preliminary work towards
the development of a MAS aiming at handling the
situation-aware adaptation of a Smart Environment
behavior. In this MAS different types of agents
cooperate to the adaptation process, which is
performed at different levels, starting from the
interpretation of sensor data from Sensor Agents,
A MULTIAGENT SYSTEM SUPPORTING SITUATION AWARE INTERACTION WITH A SMART ENVIRONMENT
71

planning services satisfying the recognized user’s
goals and arriving to the decision on how to act on
devices from Effector Agents. Pervasive interaction
with the user is implemented through the Interactor
Agents’ behavior, which adapts the choice of the
most appropriate interaction methapor to the context
and to the user preferences and needs.
Still, open problems remain and will be the
subject of our future work. An open issue regards
how to reason on users’ reactions to the proposed
flow of activities in order to adopt the optimal
behavior of the SHE. In fact, when the user undoes
or gives a negative feedback to one or more actions
of the selected workflow, it is necessary to
understand if this is just an exception or if it must
affect the reasoning models, e.g. because there is: (i)
a change in the situation that has not been detected or
taken into account, (ii) a mistake in controlling the
effectors to achieve a simple goal, (iii) a mistake in
interpreting the user’s goals or in selecting or
composing the workflow.
Each of the latter cases determines which agent
in the MAS has made a wrong decision, and is to be
involved in theory refinement. Identification of the
specific case should be obtained by an analysis of
the user’s feedback, and introduces a related issue,
that is who is in charge of identifying the problem,
gathering the feedback and notifying it to the proper
agent that must activate its learning behavior. A
candidate for taking care of these activities is the
Interactor Agent, because it is equipped with the
skills necessary for the execution of communicative
goals.
Finally, in the near future we plan to collect more
examples of interaction with the system to simulate
and evaluate its behavior in all the possible situations
that are relevant for our application domain.
REFERENCES
Cavone, D., De Carolis, B., Ferilli, S., Novielli, N., 2011.
An Agent-based Approach for Adapting the Behavior
of a Smart Home Environment. In Proceedings of
WOA 2011, http://ceur-ws.org/Vol-741/ID14_Cavone
DeCarolisFerilliNovelli.pdf
De Carolis, B., Cozzolongo, G. and Pizzutilo, S., 2006. A
Butler Agent for Personalized House Control. ISMIS:
157-166.
De Carolis, B. Mazzotta, I. Novielli, N., 2009. NICA:
Natural Interaction with a Caring Agent. In Ambient
Intelligence, European Conference, AmI 2009,
Salzburg, Austria, November 18-21, vol. 5859/2009,
pages 159-163, ISBN: 978-3-642-05407-5, ISSN:
0302-9743 (Print) 1611-3349 (Online), DOI:
10.1007/978-3-642-05408-2_20, Springer Berlin /
Heidelberg, http://www.springerlink.com/content/463
6294560388663/ 2009.
Esposito, F., Fanizzi, N., Ferilli, S., Basile, T. M. A. and
Di Mauro, N., 2006. Multistrategy Operators for
Relational Learning and Their Cooperation.
Fundamenta Informaticae Journal, 69(4):389-409,
IOS Press, Amsterdam.
Falcone, R. and Castelfranchi, C, 2001. Tuning the
Collaboration Level with Autonomous Agents: A
Principled Theory. AI*IA: 212-224.
Ferilli S., Basile T. M. A., Di Mauro N., Esposito F., 2005.
On the LearnAbility of Abstraction Theories from
Observations for Relational Learning. In: J. Gama, R.
Camacho, G. Gerig, P. Brazdil, A. Jorge, L. Torgo.
Machine Learning: ECML 2005. P. 120-132, Berlin:
Springer, ISBN/ISSN: 3-540-29243-8.
Ferilli S., Esposito F., Basile T. M. A., Di Mauro N., 2005.
Automatic Induction of Abduction and Abstraction
Theories from Observations. In: S. Kramer, B.
Pfahringer. Inductive Logic Programming. p. 103-
120, Berlino: Springer, ISBN/ISSN: 3-540-28177-0.
Kim J. et al., 2004. An Intelligent Assistant for Interactive
Workflow Composition. 9th international conference
on Intelligent User Interfaces, pp:125-131, ACM
Press.
Meyer, H., 2007. On the Semantics of Service
Compositions. Lecture Notes in Computer Science,
Volume 4524/2007, 31-42.
Muggleton, S. H., 1991. Inductive Logic Programming.
New Generation Computing, 8(4):295-318.
Martin, D. Burstein, M. McDermott, D., McIlraith, S.
Paolucci, M., Sycara, K., McGuinness, D., Sirin, E.
and Srinivasan, N., 2007. “Bringing Semantics to Web
Services with OWL-S”, World Wide Web Journal,
Vol. 10, No. 3.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
72
