
PEDESTRIAN DEAD RECKONING AS A COMPLEMENTARY
METHOD FOR WIRELESS SENSOR NETWORK AD-HOC PERSON
LOCALIZATION
Tobias G
¨
adeke, Johannes Schmid, Wilhelm Stork and Klaus D. M
¨
uller-Glaser
Institute for Information Processing Technologies (ITIV), Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany
Keywords:
Localization, Wireless, Sensor Networks, Person, Pedestrian.
Abstract:
The problem of localization and navigation in areas without any or with only limited access to global naviga-
tion satellite systems (GNSS) is still not solved. This is especially the case for person localization applications
as persons tend to spend a good part of their time in buildings or in cities (urban canyons). One possibility
to approach this issue is to use wireless sensor network (WSN) technology. Especially scenarios that require
ad-hoc person localization like firefighters that enter a burning building or similar setups, WSN seem to be
a promising solution. However, if the node density is low or if the scenario also requires localization in un-
covered areas, an additional localization method is required. Pedestrian dead reckoning (PDR) is an ideal
complementary method to achieve short term accurate localization under these assumptions.
In this paper, an approach to PDR with low processing power for the use in WSN with a hip mounted inertial
measurement unit (IMU) is presented. The purpose of the system is to provide a localization and tracking
solution if temporarily none or only few anchor nodes are within communication range. This is achieved by
detecting steps, estimating the length of each step and determining the step direction in WSN coordinates.
We experimentally evaluate the system under varying environmental conditions and show that the concept is
a promising solution for the intended applications.
1 INTRODUCTION
To solve the challenge of node localization, a lot of
research has been undergone in the field of localiza-
tion in wireless sensor networks (WSN) during the
last few years. The problem of correlating a measured
value with its time and its location is a fundamental
requirement in most applications. Figure 1 shows one
example of an application of such WSN for localiz-
ing and tracking persons in scenarios where global
navigation satellite systems (GNSS) are not available.
Other possible application areas of a system that can
provide localization under such conditions are for ex-
ample firefighters or other rescue forces that want to
logistically coordinate a mission. In these scenar-
ios an easily installable and robust solution to the lo-
calization problem is required. To achieve this, one
way could be to use a dedicated WSN for localization
with the additional feature of providing communica-
tion within the network. Additionally, this allows the
integration of other sensor readings, e.g., motion or
movement sensors, or smoke detectors, which leads
to a modular extensible localization and surveillance
Figure 1: Application scenario: Localization of rescue
forces in and around destroyed buildings (G
¨
adeke et al.,
2011b).
system (G
¨
adeke et al., 2011b). Other application ex-
amples with similar requirements are security forces
or localization of builders, tools and measurement
equipment on construction sites. Another use case
can be found in hospitals where patients and doctors
139
Gädeke T., Schmid J., Stork W. and D. Mueller-Glaser K..
PEDESTRIAN DEAD RECKONING AS A COMPLEMENTARY METHOD FOR WIRELESS SENSOR NETWORK AD-HOC PERSON LOCALIZATION.
DOI: 10.5220/0003804801390148
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 139-148
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

need to be localized for navigation purposes and opti-
mized scheduling.
In these intended applications, required accuracies
are in the range of a few meters, i.e. on room level.
The simplest method to achieve this in WSN is by
evaluating the received signal strength (RSS) of ra-
dio packets from anchor nodes with known positions
(Schmid et al., 2011a).
Especially in indoor scenarios however, location
estimates from RSS range-based approaches are of-
ten subject to fluctuations due to the badly predictable
behavior of RSS values. To cope with this, stochastic
filtering can be used and a system model of the mov-
ing person can be incorporated. Also, inertial sensors
can be used to improve the localization accuracy to
a certain degree (Schmid et al., 2011b). However, in
cases where the area of interest cannot be fully cov-
ered by the WSN or the anchor node density is too
low, a complementary localization system is needed
to provide short-time accurate localization during the
periods without WSN coverage.
In this paper short-time accuracy is achieved by
integrating a pedestrian dead reckoning (PDR) unit
into a WSN. Because of the low processing capabili-
ties of the sensor node’s microcontroller unit (MCU)
the application requires an approach which does not
include complex algorithms. A hip mounted inertial
measurement unit (IMU) is considered for step de-
tection, step length estimation and attitude calcula-
tion. We present results of a comprehensive experi-
mental evaluation of this concept under different en-
vironmental conditions which supplement first results
presented in (G
¨
adeke et al., 2011a).
The remainder of this paper is structured as fol-
lows: In Section 2 a short survey of the state of the art
and the related work in the field is given. In Section 3
the developed concept and information processing is
introduced. Some details on the implementation and
the undergone experimental study are given in Section
4 and the results are presented and discussed in 5. The
paper is concluded in Section 6 and an overview of the
next steps is given in 7.
2 STATE OF THE ART
The last years led to a price decline in micro electro
mechanical systems (MEMS) due to the technologi-
cal improvements for these components. Along with
this development also the interest in pedestrian navi-
gation solutions increased and many research groups
based their work on MEMS IMU inertial localiza-
tion and navigation. There are two main approaches
for placing the IMU on the human body. Often con-
sidered is the placement of the IMU on the foot of
the user. Other placements on the body need a step
counting approach for localization which will be ex-
plained at the end of this paragraph. With a foot
mounted IMU strapdown algorithms which are well
known from aerospace or marine navigation can be
applied. Usually high precision inertial sensors are
used and allow for a small error growth. The atti-
tude is obtained by a mathematical integration of the
turn rates and the position is calculated from a dou-
ble integration of the acceleration signal (Titterton,
2004). Today’s MEMS inertial sensors still suffer
from a large drift. To compensate for these drifts dif-
ferent additional system inputs have been proposed.
The zero-velocity update (ZUPT) is among the most
famous and sets the velocity to zero during each
stance phase of the gait cycle (Foxlin, 2005), (Jimenez
et al., 2010). Angular rate updates might be fused
by the zero-angular rate update (ZARU) analogously
(Jimenez et al., 2010). More recently, a heuristic drift
reduction (HDR) algorithm which makes the assump-
tion that pedestrians are mostly walking along straight
paths has been used in different peculiarities (Boren-
stein et al., 2009), (Jimnez et al., 2011). Typically,
slightly bended paths are the major challenge to these
algorithms but it works very well for long corridors or
streets. The results obtained by all approaches with
foot-mounted IMUs are very competitive. The error
for these systems are typically on the order of only a
few percent of the distance traveled (Wan and Foxlin,
2010). But, achievable accuracies depend strongly
on the inertial sensors performance and the applied
data processing. However, behind these systems a
complex system model is used and hence in a state
space model, a large state vector is needed. Also, the
dynamics occurring on the foot are quit high. That
makes it necessary to use a high update rate for the
data processing. Both of these characteristics require
fast processing capabilities which also imply shorter
battery lifetimes or larger batteries. For integration in
a WSN this is contradictory to the low power hard-
ware used within such a system.
On the other hand, beside the IMU placement on
the foot many other positions on the human body
have been evaluated. (Beauregard, 2006) consid-
ers the head, rucksack structures are used in (Nie-
dermeier et al., 2009) and another popular position
is the hip (Kourogi and Kurata, 2003). For all of
these approaches strapdown algorithms with ZUPT
and ZARU cannot be used. There is no possibility to
correct the system model and hence, the error evolves
too fast with current MEMS inertial sensors. For
these IMU positions step recognition together with
step length estimation is usually considered. In terms
SENSORNETS 2012 - International Conference on Sensor Networks
140
of accuracy, the performance for these approaches
cannot compete with the performance of the foot-
mounted systems. Relative errors are typically in the
range of 10 % of traveled distance (Randell et al.,
2003). Further improvements can be achieved by
adapting parameters and algorithms to the user’s cur-
rent posture (Sun et al., 2009). However, different
properties of the sensor signal are often requires for
such an activity classification. An example is the
frequency domain representation (Fourier transforma-
tion, e.g. FFT calculation) but also all kind of digital
filters. These algorithms are based on matrix com-
putations which are typically done by a digital sig-
nal processor (DSP). Especially with high data rates
and floating point operations these are considered too
complex for a typical MCU used on a wireless node.
To achieve pedestrian localization with ultra-low
power hardware used in WSN a hip mounted IMU
is considered. Beside the lower power consumption
this placement is also more practical and realistic for
the applications considered in this paper. The lower
dynamics in the acceleration signal also allows for
a lower update rate which further reduces the com-
putational complexity. Furthermore hip based ap-
proaches are easily portable to off-the-shelf smart
phones (Gusenbauer et al., 2010), (Serra et al., 2010).
This opens a wide range of consumer applications
like navigation in exhibition halls or airports, but also
seamless indoor/outdoor navigation in underground
parking and shopping centers.
3 SYSTEM CONCEPT
3.1 Pedestrian Dead Reckoning
In this paper an IMU of the model MTi-G from Xsens
Technologies B.V. was used. The IMU incorporates
three-dimensional acceleration sensors, gyroscopes
and magnetometers. An external GPS antenna can
be connected to further improve the internal heading
estimation algorithm. Also, when the GPS connec-
tion is used a pressure sensor stabilizes the height es-
timation. The IMU features an internal DSP which
outputs the attitude based on a preconfigured preset.
These presets influence the parameters of the attitude
calculation. For example, it can be selected that sen-
sor readings from the magnetometers should be incor-
porated in the calculation or not. The outputs of the
IMU are calibrated sensor readings from all sensors
and also the internally calculated attitude based on the
chosen preset. This is a useful feature for the consid-
ered system because the sensor nodes MCU does not
have to handle the complex calculation. A drawback
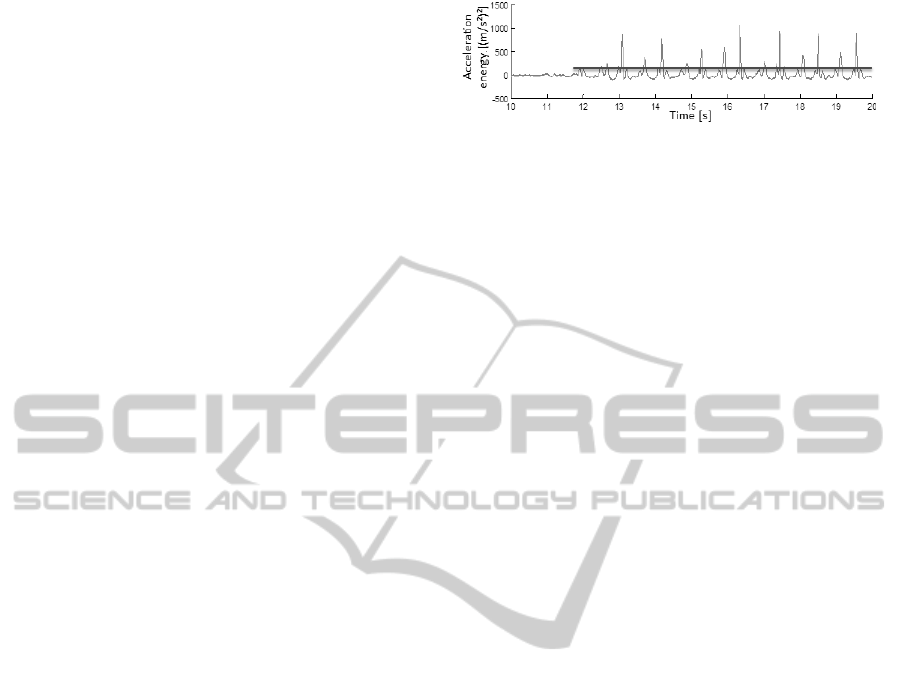
Figure 2: Acceleration energy and step detection threshold.
of this approach is that the algorithms on the sensor
node have to rely on the attitude and no further correc-
tions (like HDR, tuning of sensor readings depending
on the application) on the attitude can be applied.
As stated in Section 2 already, current MEMS IMU
do not provide the accuracy needed for strapdown al-
gorithms when it is placed somewhere on the human
body. Our approach to determine the user’s position
is based on step recognition which updates the posi-
tion estimation at each detected step. Therefore, it is
also necessary to know direction and length of each
step. These three issues will be covered in the fol-
lowing sections after a short clarification on the used
coordinate frames has been introduced.
3.1.1 Coordinate Frames
The resulting position estimation is with reference to
the navigation frame (n-frame) which represents a lo-
cal tangent plane (LTP) on the earth’s surface. How-
ever, sensor measurements from the IMU are in body
frame (b-frame)-coordinates of the IMU. To quantify
the pedestrian’s step direction an additional coordi-
nate frame is introduced. This is referred to as hu-
man frame (h-frame) in which the x-axis describes the
forward-walking direction, the y-axis is perpendicular
in the horizontal plane (sidewards) and the z-axis is
perpendicular to both other axes and roughly aligned
with the human body (up-direction).
3.1.2 Step Recognition
The detection of successive steps is based on a peak
and threshold analysis. The acceleration energy E(~a
k
)
is calculated in every time step k from all three dimen-
sions of the acceleration signal ~a
k
.
E(~a
k
) = a
2
x,k
+ a
2
y,k
+ a
2
z,k
(1)
Figure 2 shows the acceleration energy pattern with
the threshold applied. Additionally, multiple peaks
within a time-frame of 300 ms after a successfully de-
tected step are rejected. This has a similar effect as
filtering the signal with a low pass filter beforehand
and prevents multiple detections of the same step.
The threshold is set to a value of 10 (m/s
2
)
2
which
applies for slow walking patterns, but also holds for
faster walking and running.
PEDESTRIAN DEAD RECKONING AS A COMPLEMENTARY METHOD FOR WIRELESS SENSOR NETWORK
AD-HOC PERSON LOCALIZATION
141

3.1.3 Steplength Estimation
For an on-line estimation of the users step length there
exist a number of different approaches. However, they
all perform very similarly (Jahn et al., 2010). Some
approaches need a calibration for each particular user
which is not desired for ad-hoc localization (Zhao,
2010). For the purpose of this paper the Weinberg Al-
gorithm is chosen because of its simplicity and miss-
ing calibration procedure (Weinberg, 2002). The step
length SL is calculated from the maximum and min-
imum measured acceleration a in z-direction of the
n-frame. A constant parameter W can be set for unit
transformations.
SL =
4
q
max(a
n
z
) − min(a
n
z
)·W (2)
3.1.4 Step Direction
The step direction, i.e. the alignment of the IMU to
the human body, needs to be known in coordinates
of the b-frame so that it can be transformed to the
n-frame. Assuming the user is walking forward, the
step direction is given in the h-frame by the vector
[1,0,0]
T
. For normal and fast walking the step direc-
tion is characterized by a larger acceleration in move-
ment direction than the sidewards acceleration. It can
be obtained by a principal component analysis (PCA)
over these two components of acceleration (Kourogi
and Kurata, 2003). From the raw-acceleration data
in the b-frame the gravitational component g and the
acceleration a
n
z,k
has to be removed. These can be ob-
tained with the direction cosine matrix (DCM) C
b
n
k
directly.
g
b
k
= C
b
n
T
k
· [0,0,g]
T
(3)
a
b
z
n
,k
= C
b
n
T
k
· [0,0,a
n
z,k
]
T
(4)
Applying the PCA to the remaining two components
of acceleration yields the step direction
~
sd in b-frame
coordinates.
~
sd
b
k
= PCA(~a
b
k
− g
b
k
− a
b
z
n
,k
) (5)
It can, however, not yet been distinguished between
forward and backward direction. Similar to (Kourogi
and Kurata, 2003) the alternation of maximums in x-
and z-components of the h-frame acceleration is used
to determine the step direction completely. With this
kind of step direction estimation, also the relationship,
i.e., the transformation matrix between the b- and h-
frame is given by the three principal component vec-
tors returned by the PCA.
Because calculating the step direction puts a heavy
workload on the MCU, the procedure is done for ini-
tialization only. Also, the PCA delivers unreliable re-
sults if the person to localize is running or moving
Figure 3: Overview of the measurements and data process-
ing.
slowly. For these walking patterns accelerations in
other than the walking direction become more domi-
nant. This results in a noisy step direction which has
a great influence on the position estimation.
For the intended use cases it is sufficient to call the
procedure once after the device is attached to the user.
For other applications (e.g. smart phones), the for-
ward direction can change if the device is taken out
of the pocket and being put back in. This implies a
recalibration procedure whenever a reliable walking
pattern is recognized.
3.2 System and Measurement Model
To model the system and the measurement inputs, a
modified version from (Schmid et al., 2011b) is used.
Incoming measurements are processed by means of
a Kalman filter. Figure 3 shows an overview of the
considered measurement inputs and information pro-
cessing. In contrast to (Schmid et al., 2011b) PDR po-
sition updates are considered as an external input ~u
k
to the system and hence are part of the system model.
ˆx
p
k
= A · ˆx
e
k
+ B · ˆu
k
+ ˆw
k
(6)
Position updates from the WSN are considered as
measurement inputs and are processed in the update
step of the Kalman filter. For localization without an
IMU a system model which assumes a constant speed
between each time-step is used. Therefore, the state
vector ˆx
k
models position and velocity. To prevent
drifting away very fast when no sensor readings are
present at all a velocity prediction factor smaller than
1 is chosen in the system model. This is established
by setting the corresponding elements of the system
matrix A to a value smaller than 1, i.e., 0.99.
Fusing PDR position updates with the system
model increases the covariance matrix of the overall
position estimation which represents the typical be-
havior of any PDR system.
SENSORNETS 2012 - International Conference on Sensor Networks
142

Figure 4: IMU sensor node combination (Xsens MTi-G and
ITIV LocNode).
Additionally, to achieve long term stability RSS
measurements to anchor nodes (with known posi-
tions) are used upon availability. As soon as the on-
body node receives a broadcast message from an an-
chor node, distance information is deduced from the
RSS value of the received packet. This information
is fused to the current position estimate in the fil-
ter step of the Kalman filter. The relationship be-
tween distances and corresponding RSS values has
been evaluated experimentally and is modeled by the
log distance path-loss model (Schmid et al., 2011a).
As these measurements are non-linear an extended
Kalman filter is used for linearization. Complemen-
tary to the PDR covariance model feeding of RSS po-
sition estimations decreases the covariance matrix of
the system.
Localization based on PDR alone comes to use
whenever no or too few anchor nodes are available.
For example if the person to localize leaves the WSN-
covered area or arrives at a place where the anchor
node density is low. In such situations the PDR sys-
tem has to overtake until the person once again re-
ceives radio packets and the position can be corrected.
4 IMPLEMENTATION AND
EXPERIMENTAL SETUP
The presented evaluation is based on real data but
carried out offline. This method allows to evaluate
various parameter settings of data processing con-
cepts without having to re-run each experiment sev-
eral times and modify the MCU’s source code. On
the hardware side, a PDR unit to be carried on the
hip of a person to be localized has been developed.
The sensor nodes are also based on our own design.
The sensor network software is based on a proprietary
ZigBee stack implementation. The developed system
was used to record data in various environments in-
cluding in- and outdoor scenarios.
4.1 Hardware
Figure 4 shows the developed PDR-unit consisting of
the Xsens MTi-G IMU and an ITIV LocNode sensor
node(Schmid et al., 2011a). The casing is designed to
fit into a standard camera bag which can be attached
to a belt and carried on the hip of a test person. This
PDR unit allows storing the RSS values of received
radio packets as well as the IMU’s attitude estimation
and acceleration data on an SD-card.
The incorporated Xsens MTi-G IMU provides cal-
ibrated data from acceleration, gyro and magnetic
field sensors and also includes a DSP to fuse this data
for attitude estimation. The DSP’s data processing
can be tuned with predefined profiles according to the
scenario in which the unit is used. For the under-
gone experimental study, the ”aerospace” profile was
used. This profile results in an inclusion of data from
the magnetic field sensors into the attitude estimation
for long term heading stabilization. Although mag-
netic field sensors can be disturbed in indoor environ-
ments, they are the only possibility to obtain reliable
long term stability. Because fusing turn rates from
the gyro sensors with magnetic sensor readings, these
magnetic field disturbances can be partially corrected.
Also, the IMU’s incorporated GPS receiver and the
barometer were disabled and not used for this work.
4.2 Software
A ZigBee framework is used to setup a WSN with
self-organization and multi-hop capabilities. Local-
ization functionality is implemented in this frame-
work. For the purpose of an off-line evaluation,
the framework also allows to store all received radio
packets on the sensor nodes’ SD-card. Each anchor
node is configured to broadcast its own position reg-
Table 1: Overview of lengths of the experiments.
Institute
Under-
ground
Football
field
Parking
lot
mean
length [m]
700 450 750 1320
mean
length [s]
560 290 480 900
max.
length [m]
1120 510 910 1920
min.
length [m]
390 370 570 1000
PEDESTRIAN DEAD RECKONING AS A COMPLEMENTARY METHOD FOR WIRELESS SENSOR NETWORK
AD-HOC PERSON LOCALIZATION
143
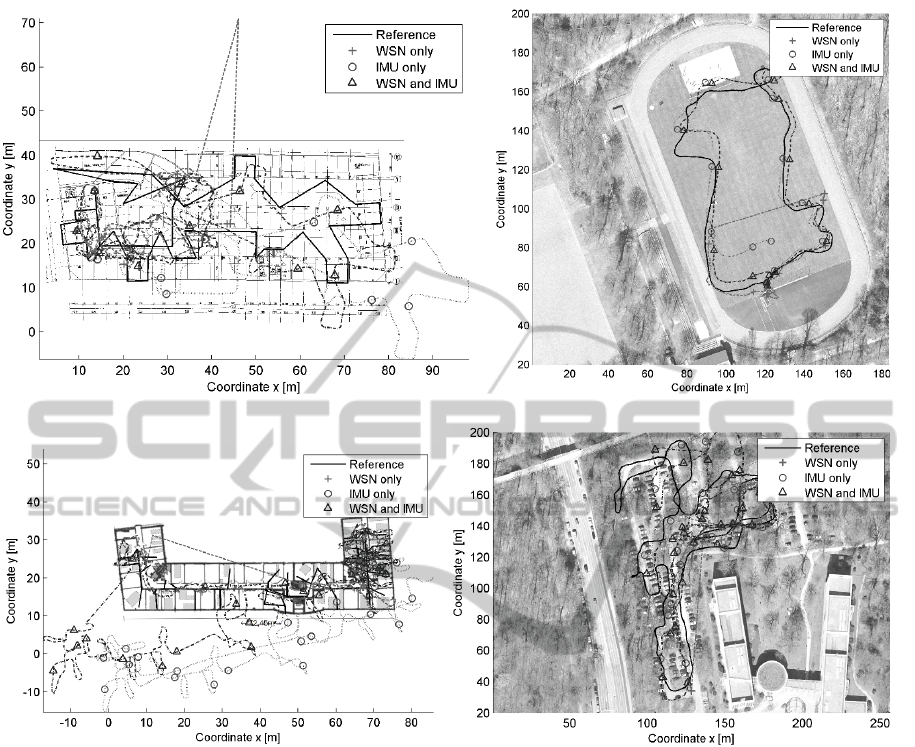
(a) Underground car park. (b) Football field.
(c) Institute building. (d) Parking lot.
Figure 5: Surroundings, ground truth and reconstructed trajectories for exemplary runs in the 4 experimental setups.
ularly at a rate of 4 Hz. The on-body node processes
acceleration and attitude data at a rate of 10 Hz and
radio packets upon availability.
4.3 Experimental Setup
For a quantitative experimental evaluation of the pro-
posed hybrid PDR WSN localization approach, a lot
of data had to be collected. The goal of the undergone
experimental campaign was to prevent an over-fitting
of the proposed fusion approach to a specific envi-
ronment. For this purpose, four experiments in the
institute office building, an underground car park, a
football field and a parking lot were carried out. In
each experiment, several runs of a couple of minutes
were conducted. Figure 5 shows an overview and an
example trajectory of one run in each environment.
A WSN with 62 sensor nodes was deployed in each
environment. To limit the influences of too many
parameters, one person carrying the IMU-equipped
sensor node was walking more than 20 km in all ex-
periments and corresponding data from the IMU and
WSN was collected. In each experiment multiple runs
with a length between 370 m and 1920 m were per-
formed. The mean lengths in meters and seconds for
each experiment are given in table 1. It can be seen
that the experiments differ in these characteristics.
That means, that different walking speeds and differ-
ent trajectories have been evaluated. Additionally to
the experiments presented in this paper the PDR con-
cept was also evaluated experimentally with different
users, but with shorter runs and without WSN data
available. A comprehensive analysis of different users
walking patterns are part of our current research.
To allow for an evaluation, a reference (ground
SENSORNETS 2012 - International Conference on Sensor Networks
144
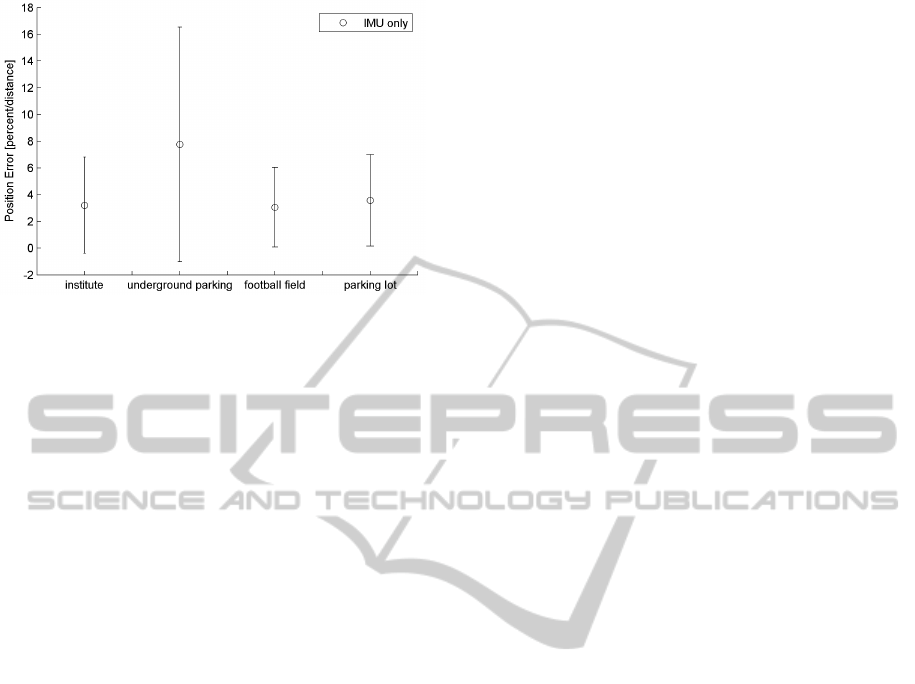
Figure 6: Stand-Alone PDR Error evaluation for all runs in
each experiment.
truth) was recorded with a differential GPS (DGPS)
in the outdoor experiments. Indoors, the user walked
various predefined trajectories. A sequence of way
points was set up and the time between reaching each
of them was measured. For every segment between
the way points a constant speed was assumed. This
method of predefining a trajectory cannot guaranty
the quality of a GPS recorded reference trajectory but
is still an adequate way to obtain a ground truth. For
the purpose of this paper a constant IMU alignment
on the test person’s body (step direction) has been as-
sumed for all runs in all experiments. To allow for
a comparison between in- and outdoor experiments
they are set up in 2D only. However, the calculations
are done in 3D and the height of the sensors can be
easily tracked by barometric sensors.
5 DATA EVALUATION AND
DISCUSSION
The gathered data were evaluated off-line with the
methods described in Section 3. The evaluation con-
centrates on the effect of a short-time accurate lo-
calization system (PDR) to bridge time intervals in
which no other localization system is available. At
first, the developed stand-alone PDR solution is eval-
uated and the resulting errors are analyzed. After that
it is shown how this PDR system can be used to sta-
bilize a WSN localization system if it is assumed that
the person to be localized leaves the WSN or the WSN
breaks down. When the person enters the WSN again,
the position errors can be corrected.
5.1 Stand-alone PDR Error Analysis
For the developed PDR system, the following error
sources are dominant. From figure 5 (circle line) it
can be seen that heading estimation indoors is not as
reliable as in the outdoor scenarios. This error is ex-
pected to be introduced by magnetic disturbances in
the indoor environments. As heading is calculated in-
ternally on the Xsens MTi-G’s DSP it cannot be cor-
rected and parameters of the filter cannot be adjusted.
Alternatively heading could be calculated from the
raw measurements from the IMU, but this would re-
quire a fast processor on the sensor node. To allow
for an implementation on a widely used WSN plat-
form and achieve long battery lifetimes this option is
not considered in this paper.
The other errors are introduced by the calculations
described in Section 3. Each falsely detected step in-
troduces an error of one step length, although the step
recognition is very robust. A more influencing error
is the step length calculation which adds a small dis-
tance during each step. Assuming a wrong but con-
stant step direction, results in a heading offset which
turns the whole trajectory in n-frame coordinates by a
certain angle around the starting point. This error can
be observed in figure 5 (c) in the institute experiment
and is the most critical part in the system. Instead of
analyzing each of the error sources alone, a general
analysis of the system’s performance in resulting po-
sition accuracies is undergone.
To quantify the errors of the PDR system, the rel-
ative deviation to the traveled distance of the refer-
ence trajectory is taken into account. Therefore the
PDR system is analyzed without the WSN localiza-
tion. The errors in every run of each experiment are
summed up and the overall relative error for each ex-
periment is calculated. Figure 6 shows the mean er-
ror and standard deviation for all runs of each experi-
ment. The mean error is between 3.5 % and 10 % of
traveled distance. The relative error is characterized
by very high values in the beginning of each run as
the total traveled distance is short and small displace-
ments result in high error quantities. At the end of
each run the relative error typically stabilizes around
5 % of traveled distance. The highest error and stan-
dard deviation is found in the underground parking
experiment. This might be due to higher disturbances
of the magnetic field and the resulting attitude estima-
tion difficulties.
However, if the developed hip-mounted PDR unit
is solely considered, the presented method allows for
error rates on the order of a few percent of traveled
distance.
PEDESTRIAN DEAD RECKONING AS A COMPLEMENTARY METHOD FOR WIRELESS SENSOR NETWORK
AD-HOC PERSON LOCALIZATION
145
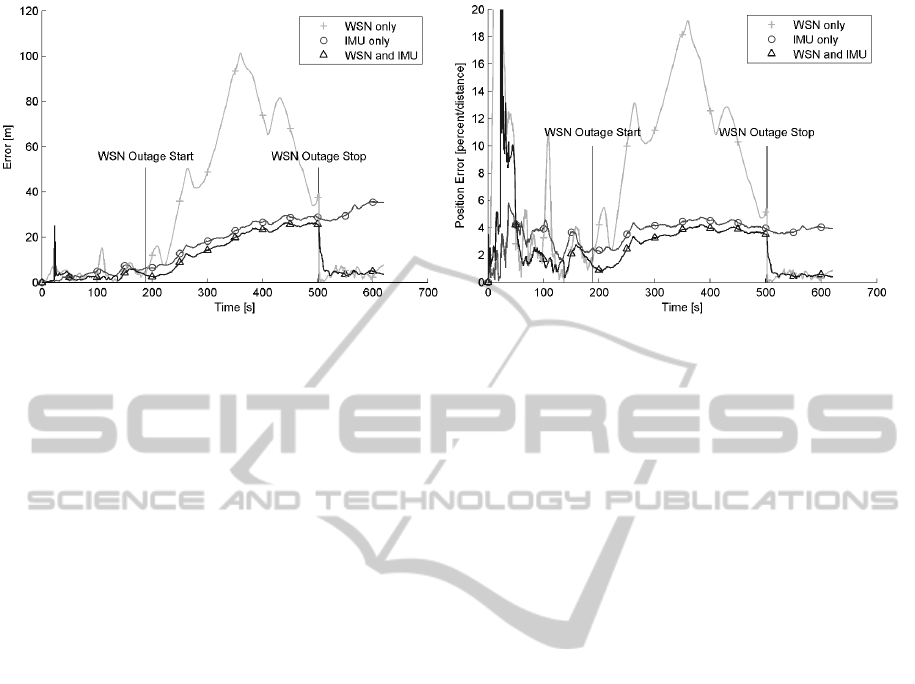
(a) Total error in meters. (b) Error in percent of traveled distance.
Figure 7: Error over time for exemplary run.
5.2 Unavailability of WSN Localization
If long term accurate reference data from a WSN is
available, the absolute error remains more or less con-
stant and the relative error converges to zero with op-
eration time of the system. Person localization in
environments where a dense WSN is deployed al-
lows for room-level accuracies (Schmid et al., 2011a).
However, in realistic scenarios it cannot be assumed
that the person to localize always remains in the area
that is covered by the WSN. Also, it has to be con-
sidered that the WSN could fail during the operation.
In such situations, localization can be continued by
means of dead reckoning.
To evaluate this concept the hybrid solution as de-
scribed in section 3 is considered. Then, it is assumed
that the WSN fails at t
down,start
= 0.3 ·t
run
and recov-
ers at t
down,end
= 0.8 ·t
run
in each run with length t
run
.
During this time, no RSS packets are received and the
IMU is used for PDR alone.
Figure 7 shows how the error evolves over time
during one example run from the experiments. It can
be seen that the total error of the position estimation
increases during the run if only IMU data are con-
sidered for the localization (circle line). Naturally,
the error remains more or less constant on a relative
scale and the downtime of the WSN does not affect
its accuracy as these data are not used. The cross
line shows localization based on data from the WSN
alone. When the network fails at t ≈ 200 s the posi-
tion sticks close to the coordinates where the last mea-
surements were received. However, the considered
position-velocity model (Section 3) draws the posi-
tion estimation away. The mentioned velocity predic-
tion factor in the system model lets the position con-
verge.
On an absolute scale this results in an increasing
error which can also be observed in the trajectories
in figure 5. As the estimated position stays roughly at
the last known position the error becomes larger when
the person moves further away from that spot. In the
presented scenarios the test person did not move too
far away from the test field so the error stays within
the bounds of the experiment’s area. Especially be-
cause the trajectories come full circle in most cases
the errors become smaller again after a certain point
in time. This implies a maximum value for the total
error. If the developed hybrid information process-
ing approach is used, the PDR system allows continu-
ous localization as long as no WSN data are available
and bridges the gap until the WSN covered area is re-
entered (triangle line). This behavior can be observed
in the trajectories in figure 5 and in the error analysis
in figure 7. Compared to the reconstructed trajectories
from PDR (circle line) or WSN (cross line) alone the
hybrid information processing approach allows for a
much better localization accuracy if an outage of the
WSN is assumed (triangle line).
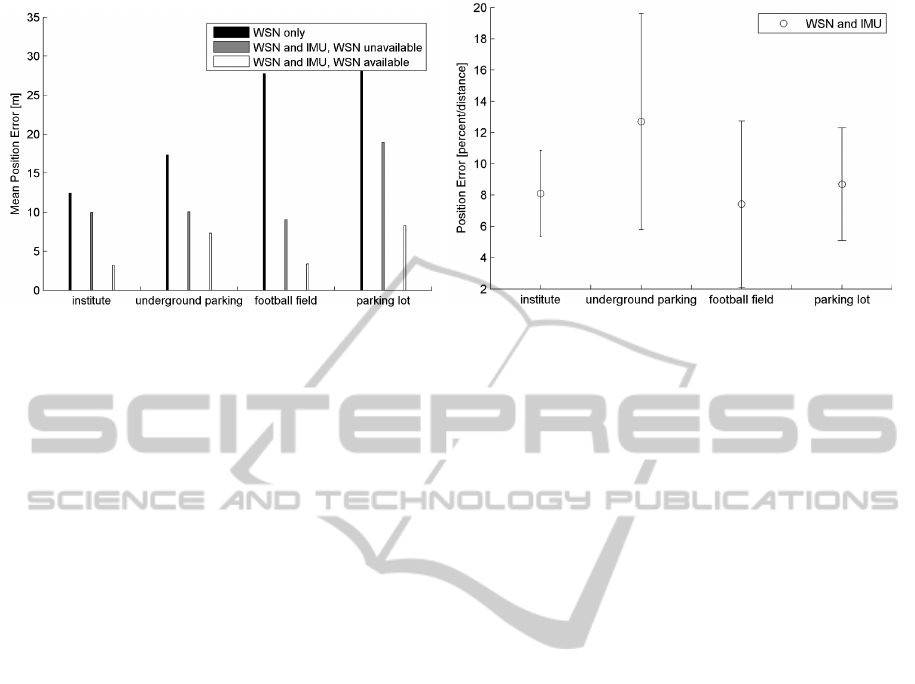
5.3 Robustness Issues and Evaluation
Figure 8 compares the resulting mean errors based on
all collected data from the presented experiments. It
shows the mean errors for failing WSN-only local-
ization and the hybrid solution with and without the
WSN failing.
With the WSN failing it can be seen that the WSN-
only solution cannot provide sufficient localization
accuracy anymore. Compared to that, for the hybrid
solution, the resulting localization accuracies in figure
8 (a) are in the range of a few meters depending on the
surroundings. If the WSN is not available anymore
SENSORNETS 2012 - International Conference on Sensor Networks
146
(a) Error in meters. (b) Error in percent of traveled distance.
Figure 8: Mean error and standard deviation over all runs in all experiments.
the mean errors increase but still allows for reasonable
localization accuracy. The much higher errors in the
parking lot experiment are due to very long runs com-
pared to the other experiments and following longer
times without WSN localization. To further quantify
the localization accuracies the relative errors are taken
into account. Therefore, relative errors during the un-
availability of each run are given in figure 8 (b). It can
be seen that the relative errors of the parking lot exper-
iment are comparable to the other experiments. In this
analysis the underground parking experiment exhibits
higher values which are introduced by very high rela-
tive errors in the beginning of each run. Because the
underground parking experiment is characterized by
a series of relatively short runs these higher errors in
the beginning contribute to the high values shown in
figure 8 (b). The high relative errors in the beginning
are introduced because a very short distance has yet
been covered but the initial absolute error is compara-
bly high. Theoretically this results in infinite large er-
rors. Compared to the stand-alone error analysis from
section 5.1 it can be seen that the relative errors are
higher in the analysis with a failing WSN. As men-
tioned before, relative errors in the beginning of the
WSN outage are very high and thus affect the over-
all error. Additionally, the covered distance is shorter
compared to the stand-alone analysis which also has
an impact on the mean relative error.
In general, the PDR approach delivers a vital com-
plementary solution to localization in ad-hoc WSN
scenarios.
6 CONCLUSIONS
This paper evaluated a person localization approach
for WSN by combining RSS localization with PDR.
A hip-mounted IMU, integrated with a wireless
sensor node is used for step detection and step length
estimation of the user. Additionally, the orientation of
the IMU in relation to the body of the person is es-
timated by means of a PCA. The paper evaluates the
system under different environmental conditions and
presents the performance of the system also when the
sensor network is left for a while.
The focus of the evaluated implementation lies
on algorithms which can be carried out on a typical
WSN MCU. Relative errors are on the order of 5 % to
10 % of traveled distance. This is comparable to state
of the art approaches, but considering the low com-
putational complexity it allows for WSN integration
and longer battery lifetimes. the performance does
not allow for long term navigation without any stabi-
lization by an absolute positioning system. But, the
method presented carries the potential for localiza-
tion and navigation applications where generally an
absolute positioning system is present but not very
reliable at all times. PDR guaranties short-term ac-
curacy, while WSN measurements provide long-term
stability. It has been shown that the presented PDR
approach allows to bridge outages of the WSN or also
helps the user to navigate through uncovered areas for
some time. Possible applications for the presented
person localization approach include firefighters or
security scenarios but also construction sites and hos-
pitals. Also, the principal portability on many smart
phones opens a wide range of consumer applications
like navigation in large buildings (e.g. airports, exhi-
bition halls, shopping centers or others). The contri-
bution of this paper is an efficient approach to PDR
with low processing capabilities and a comprehensive
experimental analysis of the system under varying en-
vironmental conditions.
PEDESTRIAN DEAD RECKONING AS A COMPLEMENTARY METHOD FOR WIRELESS SENSOR NETWORK
AD-HOC PERSON LOCALIZATION
147

7 FUTURE WORK
For the next future, it is planned to further study the
attitude estimation done by the integrated DSP inside
the IMU. Therefore, we are currently working on a
new design for a hip-mounted PDR unit. Further-
more, in terms of algorithms design, we are work-
ing on a classification of typical movement patterns to
improve and optimize the performance for a specific
application scenario. Based on the movement classi-
fication the alignment procedure of the IMU will be
further improved. Also, the initialization process of
the anchor nodes and cooperative approaches will be
evaluated further.
ACKNOWLEDGEMENTS
This work was carried out within the Research
Training Group GRK 1194 ”Self-organizing Sensor-
Actuator Networks” and is supported by the German
Research Foundation (DFG). We would like to thank
the DFG for supporting our work.
REFERENCES
Beauregard, S. (2006). A helmet-mounted pedestrian dead
reckoning system. In Proceedings of the 3rd In-
ternational Forum on Applied Wearable Computing
(IFAWC 2006).
Borenstein, J., Ojeda, L., and Kwanmuang, S. (2009).
Heuristic reduction of gyro drift for personnel track-
ing systems. Journal of Navigation, 62:41–58.
Foxlin, E. (2005). Pedestrian tracking with shoe-mounted
inertial sensors. IEEE Comput. Graph. Appl.,
25(6):38–46.
G
¨
adeke, T., Schmid, J., Stork, W., and M
¨
uller-Glaser, K. D.
(2011a). Pedestrian dead reckoning for person local-
ization in a wireless sensor network. In Proceedings of
International Conference on Indoor Positioning and
Indoor Navigation (IPIN).
G
¨
adeke, T., Schmid, J., Stork, W., Reinhardt, M., Markus,
M., and Blank, T. (2011b). Ad-hoc sensor network for
building monitoring and person localization. In Pro-
ceedings of the 1st International Conference on Wire-
less and Mobile Networks (ICWMCN).
Gusenbauer, D., Isert, C., and Kroesche, J. (2010). Self-
contained indoor positioning on off-the-shelf mobile
devices. In Proc. Int Indoor Positioning and Indoor
Navigation (IPIN) Conference, pages 1–9.
Jahn, J., Batzer, U., Seitz, J., Patino-Studencka, L., and
Gutirrez Boronat, J. (2010). Comparison and evalu-
ation of acceleration based step length estimators for
handheld devices. In Proc. Int Indoor Positioning and
Indoor Navigation (IPIN) Conference, pages 1–6.
Jimenez, A. R., Seco, F., Prieto, C., and Guevara, J. (2010).
Indoor pedestrian navigation using an ins/ekf frame-
work for yaw drift reduction and a foot-mounted imu.
In WPNC 2010: 7th Workshop on Positioning, Navi-
gation and Communication 2010.
Jimnez, A., Seco, F., Zampella, F., Prieto, C., and Guevara,
J. (2011). Improved heuristic drift elimination (ihde)
for pedestrian navigation in complex buildings. In In-
ternational conference on indoor Positioning and In-
door Navigation - IPIN.
Kourogi, M. and Kurata, T. (2003). Personal position-
ing based on walking locomotion analysis with self-
contained sensors and a wearable camera. In Proc.
Second IEEE and ACM Int Mixed and Augmented Re-
ality Symp, pages 103–112.
Niedermeier, H., Ameres, G., Pany, T., and Eissfeller, B.
(2009). First results from supporting long coherent
cdma correlations by a mems ins and a pedestrian nav-
igation system for hs-gnss applications. In Proc. 6th
Workshop Positioning, Navigation and Communica-
tion WPNC 2009, pages 5–13.
Randell, C., Djiallis, C., and Muller, H. (2003). Personal
position measurement using dead reckoning. In ISWC
’03: Proceedings of the 7th IEEE International Sym-
posium on Wearable Computers, page 166, Washing-
ton, DC, USA. IEEE Computer Society.
Schmid, J., Beutler, F., Noack, B., Hanebeck, U., and Mller-
Glaser, K. (2011a). An experimental evaluation of
position estimation methods for person localization in
wireless sensor networks. Wireless Sensor Networks,
pages 147–162.
Schmid, J., Gaedeke, T., Stork, W., and Mueller-Glaser,
K. D. (2011b). On the fusion of inertial data for signal
strength localization. In Proceedings of the 8th Work-
shop on Positioning, Navigation and Communication.
Serra, A., Dess
`
ı, T., Carboni, D., Popescu, V., and Atzori,
L. (2010). Inertial navigation systems for user-centric
indoor applications.
Sun, Z., Mao, X., Tian, W., and Zhang, X. (2009). Activity
classification and dead reckoning for pedestrian nav-
igation with wearable sensors. Measurement Science
and Technology, 20(1).
Titterton, David H. ; Weston, J. L. (2004). Strapdown in-
ertial navigation technology. Progress in astronautics
and aeronautics ; 207. Institution of Electrical Engi-
neers, Stevenage, 2. ed. edition.
Wan, S. and Foxlin, E. (2010). Improved pedestrian nav-
igation based on drift-reduced mems imu chip. Pro-
ceedings of the 2010 International Technical Meeting
of The Institute of Navigation, pages 220–229.
Weinberg, H. (2002). Using the adxl202 in pedometer and
personal navigation applications. Technical report,
Analog Devices.
Zhao, N. (2010). Full-featured pedometer design realized
with 3-axis digital accelerometer. Analog Dialogue,
44(06).
SENSORNETS 2012 - International Conference on Sensor Networks
148
