
FAST TRANSPARENT VIRTUAL MEMORY FOR COMPLEX DATA
PROCESSING IN SENSOR NETWORKS
Nan Lin
1
, Yabo Dong
1,2
and Dongming Lu
1,2
1
College of Computer Science and Technology, Zhejiang University, Hangzhou, China
2
Cyrus Tang Center for Sensor Materials and Applications, Zhejiang University, Hangzhou, China
Keywords:
Virtual Memory, Memory Cache, Code Transformation, Sensor Networks.
Abstract:
Sensor networks has been used in numerous fields, some of which require complex processing of large amount
of data, such as visual surveillance. Low-power MCUs on sensor nodes have kilobytes of RAM which is not
enough for mass data processing. In this paper, we present a transparent software-based virtual memory for
mass complex data processing in sensor networks which can be much larger than the physical memory. Tradi-
tional optimizations have been employed and tuned to best suit the virtual memory. Address translations were
found to be a major overhead in virtual memory for most applications. With respect to assembly conversion
commonly used in other software-based virtual memory systems, we use flexible C code transformation which
generates cache index buffers to greatly reduce the address translation overhead. The usability of the virtual
memory is further verified by a number of common algorithms using the virtual memory.
1 INTRODUCTION
As sensor nodes continue to evolve, sensor networks
are used in more and more regions. Sensor nodes now
are able to collect much more data from the environ-
ment. For example, visual sensor nodes acquire kilo-
bytes or megabytes of image/video data. In-situ data
processing might be required to reduce network traffic
or to provide real-time response. Complex mass data
processing would require a large amount of mem-
ory space for data storage and processing, however
traditional sensor nodes are generally highly energy-
constrained with only kilobytes of RAM.
The straightforward solution is to use a sensor
node platform powered by an MCU with a large
SDRAM. Unfortunately, SDRAM has been known
to be more expensive and energy-consuming per bit
compared to other memory mediums (NOR FLASH,
NAND FLASH, et al.). So it would be extremely dif-
ficult for sensor networks to provide sufficient RAM
space for mass data processing while still be within
acceptable range of power consumption and hardware
cost. For example, Intel Mote 2(Crossbow Technol-
ogy, 2007) is a sensor platform with increased CPU
performance and improved radio bandwidth to ac-
quire, process and transmit large data streams. The
platform provides 32MB SDRAM on-board, however
the current in deep sleep mode is about 390µA which
is much larger than that of traditional motes
(about 10µA) (Crossbow Technology, 2009a; Cross-
bow Technology, 2009b). This would greatly reduce
the lifetime of the sensor nodes. So, sensor platforms
with large RAM space are not suitable for long-time
surveillance.
Virtual memory has been used in traditional op-
erating systems to extend usable memory for appli-
cations(Denning, 1970). With MMU (memory man-
agement unit), virtual memory can provide each ap-
plication a flat memory space which can be much
larger than the actual physical memory size. Virtual
memory however can not be applied to sensor net-
works directly. Sensor node platforms usually use
non-MMU processors to reduce power consumption
and hardware cost, thus hardware aided virtual mem-
ory is normally not an option for sensor networks.
Software based virtualizations are usually used to pro-
vide virtual memory support for sensor networks(Gu
and Stankovic, 2006; Lachenmann et al., 2007).
Software based virtual memory may involves cal-
culations or external storage accesses which may slow
down node code execution considerably. In tradi-
tional sensor networks where nodes are featured by
burst code execution, this problem can be neglected
as long as the node interactivity performance is not
affected significantly(Gu and Stankovic, 2006). How-
ever, when mass data is acquired and processed, vir-
24
Lin N., Dong Y. and Lu D..
FAST TRANSPARENT VIRTUAL MEMORY FOR COMPLEX DATA PROCESSING IN SENSOR NETWORKS.
DOI: 10.5220/0003804900240034
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 24-34
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

tual memory overhead will be significant and takes a
great proportion of execution time. Since processing
power and energy supply of sensor nodes are limited,
sensor nodes can not afford long-time high intensity
processing or external storage accessing. So, virtual
memory for data-intensive sensor networks must be
highly efficient in code execution and external stor-
age accessing.
Virtual memory for mass data processing in sen-
sor networks should be transparent for programmers.
Existing algorithm implementations should be us-
able immediately or can be used with minor modi-
fications. This can greatly reduce the software de-
velopment cost, especially for some sophisticated
data processing algorithms (e.g. image compres-
sion & decompression). Complex data processing
algorithms may employ a good deal of pointer ma-
nipulation and de-referencing. Some software-based
virtual memory however may not allow accessing
virtual memory using pointers or virtual memory
pointer calculation(Lachenmann et al., 2007). Trans-
parency of virtual memory pointers manipulations
and de-referencing makes programmers much easier
to port or implement complex data processing algo-
rithms. Virtual memory should be able to tell point-
ers of virtual memory from pointers of physical mem-
ory(RAM) and handle them accordingly. It will be a
significant burden if programmers have to be aware of
the destination memory type of pointers.
We have developed a virtual memory system
named FaTVM (Fast Transparent Virtual Memory)
for sensor networks on a platform with ARM Cortex-
M3 MCU(Ltd, 2010). FaTVM aims to provide sen-
sor network data processing programs an efficient
memory space which is much larger than the physi-
cal memory. We explored among design choices to
search for the most suitable configurations for data
processing programs in different parts of virtual mem-
ory, including cache management, code transforma-
tion, etc. Our contribution is two-fold: we have de-
veloped an efficient virtual memory system for ARM
Cortex-M3 MCUs, and we show how C code trans-
formation can be used to realize more flexible opti-
mizations to reduce virtual memory overhead.
The rest of this paper is organized as follows. Sec-
tion 2 gives an overview of FaTVM. Section 3, 4, 5
describes important components of FaTVM includ-
ing cache management, assembly virtualization and
C code virtualization. Some implementation issues
we encountered are illustrated in Section 6. Evalua-
tion of FaTVM performance is stated and described
in Section 7. Section 8 discuss related work and pos-
sible improvements and future work of FaTVM are
discussed in Section 9.
2 OVERVIEW
We describe the overview of FaTVM in several as-
pects. Subsection 2.1 describes our developing hard-
ware platform of FaTVM. Subsection 2.2 explains
how source code is virtualized and compiled to final
executive. Subsection 2.3 describes how virtual mem-
ory are accessed in programs.
2.1 Platform Description
We have been developing FaTVM on our image
sensor nodes of an image sensor network(Soro and
Heinzelman, 2009; Soro and Heinzelman, 2009). Im-
age sensor networks acquire image data by camera,
and the sensor nodes are relatively more powerful
than common motes such as MicaZ(Crossbow Tech-
nology, 2009a), TelosB(Crossbow Technology,
2009b), etc. The image sensor nodes are equipped
with 32-bit ARM Cortex MCUs(STMicroelectronics,
2011) from STMicroelectronics. The micro-
controller has 72MHz maximum frequency, 256 to
512 Kilobytes of Flash memory and up to 64 kilo-
bytes of SRAM. Although FaTVM is developed on
our image sensor nodes with relative richer resource,
it should still be straightforward to port FaTVM to
other platforms, since FaTVM does not employ any
advanced MCU features.
The sensor nodes are also equipped with Micro-
SD card for saving sensed pictures. The size of
Micro-SD card can be up to gigabytes. FaTVM uses
a dedicated SWAP partition of Micro-SD as the sec-
ondary storage. Micro-SD card is more convenient to
use than NAND flash since it has a built-in FTL(Flash
Translation Layer)(Chung et al., 2009) which handles
flash block erasing and wear-leveling.
STM32 MCU has a 4GB memory map, in which
memory address ranges of different sizes are allo-
cated for Code, SRAM, Peripherals, External RAM,
etc. FaTVM gives the programmer a view of contigu-
ous memory space and a dedicated range of address
are used by application code to access virtual mem-
ory. We have specified a sub-range of 1GB External
RAM addresses to be used by virtual memory, mak-
ing it possible to determine address type to be virtual
or physical by checking if the address is within the
dedicated address space.
2.2 Code Virtualization
FaTVM are developed without any assumption of the
underlying operating system. Program code written in
C or assembly are transformed to access virtual mem-
ory. This progress is called as code virtualization.
FAST TRANSPARENT VIRTUAL MEMORY FOR COMPLEX DATA PROCESSING IN SENSOR NETWORKS
25

Compile
Compile
Virtualizing
Sources
Other
sources
Code
Virtualizer
Object
Relocator
Virtualized
Objects
Other
Objects
Final
Executive
Figure 1: Program building process with FaTVM.
Figure 1 shows how source files are virtualized and
compiled to objects, which are relocated and linked
to the final executive. The programmer is responsi-
ble for specifying which source files to be virtualized
thus it is possible to wrap only a selected set of mod-
ules. Code virtualizer transform source code written
by programmers who may not be aware of the vir-
tual memory to work with FaTVM. Object relocater
moves all variables in physical data section to VM
data section. It is still possible for the programmers
to manually specify variables to be allocated in phys-
ical memory. This may bring significant performance
improvement if the variables are accessed frequently
in the program.
Assembly virtualization are commonly used in
other software-based virtual memory mechanisms.
Memory load or store instructions are replaced by
subtle assembly snippets to handle virtual memory ac-
cesses. It is a straightforward software method for im-
plementing virtual memory. However, assembly vir-
tualization has the following drawbacks.
• The overhead of assembly virtualization is high;
• The replacements for memory load/store instruc-
tions are difficult to craft;
• It is difficult to manually write complex assembly
routine;
• Assembly virtualization may brought issues re-
lated to MCU instruction set specifics. More de-
tails about this can be found in section 6.
The current execution context(e.g. status register)
needs to be saved before accessing VM and restored
afterwards if the context will be ruined during access-
ing VM. Complex functionalities like cache searching
and management are normally implemented in C, and
invoking C routines from assembly brings about func-
tion invocation overhead. STM32 MCUs supports
many load/store instructions and flexible addressing,
so it is a challenge to write assembly VM accessing
routines for all different memory load or store in-
structions. Further more, it is extremely difficult to
implement sophisticated optimizations directly in as-
sembly, avoiding function invocation.
FaTVM introduced C code virtualization. C
source files are transformed by virtualizer and com-
piled to objects without assembly transformations. C
code virtualization enables more flexible code trans-
formation and we have taken advantage of this to con-
struct more complex routines for accessing VM with
further optimizations. Section 5 describes details of
the C code virtualization. Yet, FaTVM still supports
assembly virtualization, which can be a comparison
for C code virtualization, and is able to virtualize
compiled libraries when the source code is missing.
2.3 Accessing Virtual Memory
FaTVM uses caches to boost virtual memory perfor-
mance. When accessing virtual memory, the Micro-
SD block containing the accessing bytes are first read
to cache. Then, the virtual address is converted to
physical address to the corresponding bytes in cache.
This conversion is called address translation. Finally
the corresponding bytes in cache are read or written to
accomplish the access request. Caches greatly reduce
secondary storage accessing cost because FaTVM
reads or writes secondary storage only when it failed
to find a usable cache. The cache organization is de-
scribed at length in section 3. According to our evalu-
ations, address translation rather than secondary stor-
age accessing is responsible for the major overhead of
virtual memory in data-intensive programs. We have
employed specialized optimization in C code virtu-
alization which is able to reduce address translation
overhead to a great extent.
3 CACHE MANAGEMENT
A configurable number of block sized caches are used
to store block data during multiple accesses. Since
Micro-SD card is read or written on a block basis,
each cache is of the size of a Micro-SD block (typ-
ically 512 bytes), which we call it a cache block, to
facilitate cache fetching and writing back. The cache
data can be fetched from or written back to Micro-SD
card by reading or writing one block. The number of
cache blocks is limited by available free memory size.
It is apparent that allocating more cache blocks leads
to less cache misses.
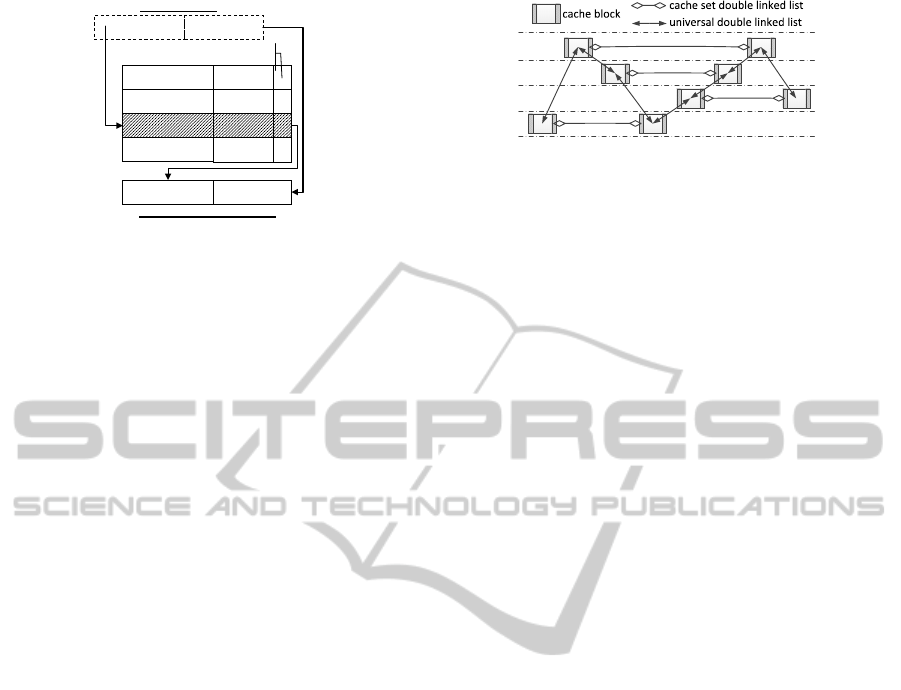
3.1 Address Translation
In general, application code accessing virtual mem-
ory is translated to reading or writing of Micro-SD.
Micro-SD must be read block by block, and they
are cached in memory to accelerate multiple access-
ing. Virtual addresses are resolved to physical ad-
dresses located in cache blocks. The address trans-
lation progress are shown in figure 2. Each cache
SENSORNETS 2012 - International Conference on Sensor Networks
26
cache array:
=
resolved physical address
virtual address
dirty flag
higher bits
block offset
cache address
block offset
identify flag
reversed
Figure 2: Address translation in FaTVM.
block has a 4-byte field for storing per-cache control
information. The structure of per-cache control field
is also shown in figure 2. The control field consists of
an identify flag and a dirty flag. The identify flag is
the visual address of the corresponding virtual mem-
ory block without the lower bits of zero. The dirty bit
indicates whether the cache block is written and needs
to be written back to the secondary storage.
3.2 Cache Searching and Replacement
The algorithms for cache searching and replacement
have a great influence on the performance of virtual
memory.
Rather than using set associative caches(Hennessy
et al., 2003), we use fully associative caches in which
any cache can be mapped to any Micro-SD block.
Figure 3 shows the data structures for managing cache
blocks. All cache blocks are linked in the univer-
sal double linked list. The order of cache blocks in
the universal double linked list is determined by the
adopted cache replacement algorithm. When resolv-
ing a virtual address, all cache blocks are traveled in
specific order to find the matched cache. Searching
among fully associative caches are generally slower
than searching among set associative caches because
set associative caches can be implemented using ef-
ficient cache array data structure. Nevertheless, fully
associative cache are known for its best (lowest) miss
rates(Hennessy et al., 2003), and so it performs best
in FaTVM because the miss penalty is high.
Despite the fully associative caches, FaTVM uses
set associative lists to accelerate cache searching.
Cache blocks within the same set are hashed to one
of the cache set double linked lists accordingly to en-
able faster searching for a specified cache. The lists
are also shown in figure 3.
We use LRU algorithm for cache replacement.
Cache blocks in the universal double linked list are
ordered by the their recent used times. CFLRU(Park
et al., 2006) can also be implemented easily using
the universal double linked list, however it does not
Figure 3: Cache management data structures for searching.
bring performance improvement for many programs
according to our evaluation.
3.3 Optimizing Micro-SD Accessing
We have employed a number of effective optimiza-
tions for Micro-SD accessing.
Micro-SD card supports asynchronous operations.
Asynchronous accessing saves secondary storage ac-
cessing time by reading or writing Micro-SD simul-
taneously while the program is doing other computa-
tion.
SD card is read and written on block basis, and
writing multiple conjoint blocks in one call can be
much more efficient than writing blocks one by one.
FaTVM write multiple conjoint dirty blocks when
possible. When writing a dirty block back (the block
is being replaced), FaTVM travel through subsequent
blocks to find contiguous dirty blocks, whose both
cache index and virtual memory address are contigu-
ous. Evaluation shows that this can be a significant
cost reduce in SD card operations.
4 ASSEMBLY VIRTUALIZATION
Assembly virtualization is a straightforward method
for implementing software-based virtual memory. In
STM32 MCU, memory access instructions include
the LDR and STR instructions and their numerous
variants. In this section, we describe the wrapping
of LDR/STR instructions and some optimizations for
reducing address translation overhead.
FaTVM assembly virtualizer replaces LDR/STR
instructions with customized routines which access
the virtual memory at specified addresses. Figure 4
shows an simplified assembly wrapping example. The
replacing assembly routine is responsible for the fol-
low tasks.
1. Save and restore APSR (application status regis-
ter);
2. Determine if the address is in virtual memory, and
branch if accessing physical memory;
3. Save and restore registers used in this routine;
FAST TRANSPARENT VIRTUAL MEMORY FOR COMPLEX DATA PROCESSING IN SENSOR NETWORKS
27

push {r0, APSR}
cmp r2, #0x70000000
blo L_Ram_access
push {r2, r1, r3, ip, lr}
add r0, r2, #20
bl vm_resolve_w
mov r2, r0
pop {r1, r3, ip, lr}
str r3, [r2, #20]
L_Return:
str r3, [r2]
pop {r2, APSR, r0}
b L_Return
L_Ram_access:
str r3, [r2, #20]
pop {APSR, r0}
b L_Return
Figure 4: Wrapping an STR instruction.
4. Invoke the address translation routine written in
C;
5. Execute memory operation using the translated
physical address.
Cortex-M3 MCUs support many different LDR/STR
instructions and flexible addressing. Currently,
FaTVM assembly virtualizer generates different as-
sembly wrapping routines for different instructions.
The wrapping routine generator is carefully crafted to
handle all LDR/STR instructions correctly. This is
highly correlated with the MCU instruction set, and
we leave out the details in this paper.
Load or store instructions in assembly includes ac-
cessing of both virtual memory and physical mem-
ory. However in assembly, the semantics of C source
can not be accessed, making it not straightforward
to determine if virtualization is needed. We have
developed a simple intraprocedural data flow analy-
sis to analyze to derive register values in instructions
within procedures. We maintain a register set descrip-
tion(RSD) for each instruction in all assembly func-
tions, in which the possible values for each register
(in STM32 register table) are saved. Using the deriva-
tion rules of instructions, RSD of one instruction can
be derived from RSD of its preceding instructions.
For each function in assembly, the algorithm starts
at the function entry by setting up RSD for the sen-
try instruction and analyze instructions until RSDs not
change anymore. For a load/store instruction, the pos-
sible values of the source register can be checked to
determine the destination memory type. We leave out
the implementation details of this analyzation algo-
rithm in this paper.
To further take the advantages of the high locality
of data-intensive sensor node program behavior, we
save the most recent address resolution to aid subse-
quent accesses to the same block. We use two fixed
registers to save source address and destination ad-
dress of the last address resolution. Upon a address
resolution, the resolving virtual address is saved in
one fixed register and the resulting address is saved
in the other fixed register. In subsequent address re-
solving , a fast match computation is carried out, and
if the current resolving virtual address is within the
same block with that of the last address resolution,
the physical address in cache can be easily computed
using the last resolution result.
5 C CODE VIRTUALIZATION
We use CIL (C Intermediate Language)(Necula et al.,
2002) to transform C code. Preprocessed C sources
are passed to the C code virtualizer, and then com-
piled by C compiler.
5.1 Image-based Lvalue Virtualization
C code reads or writes memory space in the form of
lvalue, that is memory is accessed when any lvalue is
read or written. C compilers normally translate lvalue
access to assembly code that load or save at the start
address of the specified lvalue, however in our vir-
tual memory, memory addresses of lvalues in virtual
memory are not located in physical memory, making
direct load or store fail. C code virtualization trans-
forms C code so that lvalues in virtual memory are
accessed using virtual memory routines. Generally,
when reading an lvalue, the start address of the lvalue
and the size of the lvalue are passed to a predefined
virtual memory routine and the corresponding bytes
are read from virtual memory. Writing an lvalue is
analogous.
To facilitate C code virtualization, we create local
variables in functions for lvalues, which we call them
local images. Local images are the copied values of
the lvalues. Each different lvalue has its local image if
the lvalue access needs to be virtualized and the type
of the local image is same as the type of the lvalue.
Generally, there are two different forms of lvalue vir-
tualization listed as bellows.
• Reading lvalue in expression: read the lvalue to
its local image and replace the lvalue with its local
image in the expression;
• Assigning lvalue in instruction: replace the lvalue
with its local image and write the local image back
to the lvalue after assigning.
A simple example of C code translation is shown in
figure 5. Note that evaluating one expression may
reads two or more lvalues resulting a number of vir-
tual memory accesses.
Not all lvalues need virtualization. For those lval-
ues which can be inferred to be located in physical
memory(e.g. local variable lvalue), virtualization is
not applied. The current implementation simply de-
cide based on lvalue type. Global or static variables
are determined to be allocated in virtual memory ex-
cept those the programmer specified to be in physi-
cal memory. Local variables are determined to be in
SENSORNETS 2012 - International Conference on Sensor Networks
28
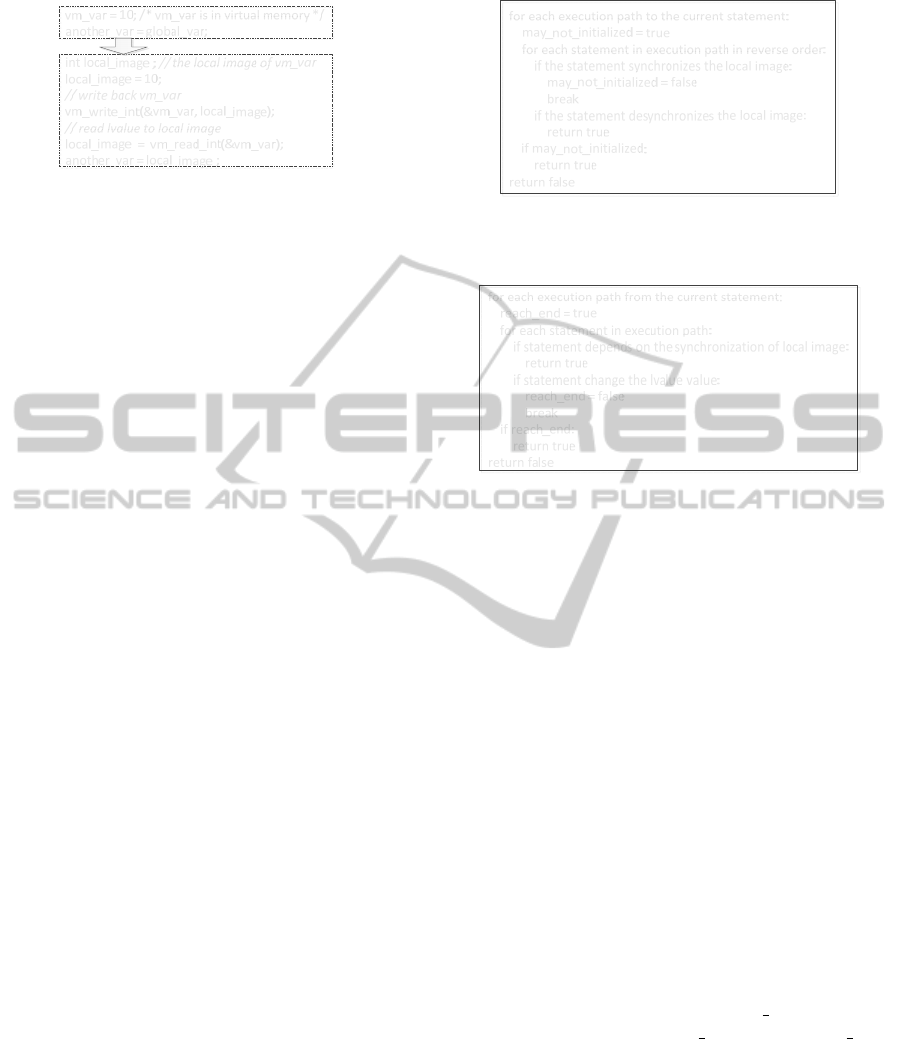
vm_var = 10; /* vm_var is in virtual memory */
another_var = global_var;
int local_image ; // the local image of vm_var
local_image = 10;
// write back vm_var
vm_write_int(&vm_var, local_image);
// read lvalue to local image
local_image = vm_read_int(&vm_var);
another_var = local_image ;
Figure 5: C lvalue virtualization.
physical memory and accessed at native speed. Lval-
ues involving pointer de-referencing (e.g lvalue ”*p”)
are always virtualized conservatively, because the tar-
get memory types of pointers are unknown.
5.2 Lvalue Synchronization Algorithms
Local images needs to be synchronized to their lval-
ues when it is read or written so as not to destroy
the original logic of program. Synchronization of an
lvalue and its local image includes reading value of
lvalue to local image and writing local image back
to the lvalue. However, when an lvalue is used in a
piece of code for multiple times, it is not necessary to
synchronize the local image at all time. FaTVM uses
data dependence analysis to determine if local images
need to be updated or written back when they are used
as substitutes of their corresponding lvalues. The al-
gorithms of data dependence analysis for local image
update and writing back are shown in figure 6 and fig-
ure 7. A local image is read from the lvalue when it
may have been unsynchronized in any execution path
to the current statement. As in figure 6, the a local
image is updated when there exists a statement which
may be executed prior to the current statement and
may desynchronize the local image, and there exists
an execution path from the desynchronizing statement
and the current statement in which no statement syn-
chronize the local image. The local image needs to
be written back if the value of lvalue affect any sub-
sequent execution. As in figure 7, data dependence
analysis is used to determine if the subsequent exe-
cutions depend on the synchronization between the
local image and the lvalue. These two algorithms
are able to avoid superfluous local image synchro-
nizations, which becomes significant if program ref-
erences the same lvalue for many times.
There are four relations between code statements
and lvalues referenced in the above two algorithms,
listed as bellows.
• the statement synchronizes the lvalue;
• the statement desynchronizes the lvalue;
• the statement depends on the synchronization of
lvalue and its local image;
for each execution path to the current statement:
may_not_initialized = true
for each statement in execution path in reverse order:
if the statement synchronizes the local image:
may_not_initialized = false
break
if the statement desynchronizes the local image:
return true
if may_not_initialized:
return true
return false
Figure 6: Algorithm to determine if reading local images
from lvalues is necessary.
for each execution path from the current statement:
reach_end = true
for each statement in execution path:
if statement depends on the synchronization of local image:
return true
if statement change the lvalue value:
reach_end = false
break
if reach_end:
return true
return false
Figure 7: Algorithm to determine if writing local images
back to lvalues is necessary.
• the statement changes the lvalue.
A statement synchronizes a local image if any one of
the followings is true.
• the statement changes the lvalue;
• the statement read the lvalue.
For example, statement *p = val; synchronizes both
lvalues *p and val and its image since it changes the
lvalue ”*p” and reads the lvalue ”val”.
A statement desynchronizes a local image if any
one of the followings is true.
• the statement changes some lvalue which is refer-
enced in the lvalue;
• the statement changes an lvalue referring to the
same object with different but collided offset.
For example statement ”p++;” desynchronizes lvalue
*p since it changes variable ”p” which is referenced in
lvalue ”*p”. Also the statement ”union
.field1 = 100;”
desynchronizes lvalue ”union .field2” if ”union ” is
of union type with two fields named ”field1” and
”field2”;
A statement depends on the synchronization of an
lvalue and its local image if the effect of the statement
will be incorrect when the local image is not synchro-
nized to the lvalue. A statement changes an lvalue
if the lvalue is assigned in the statement. For exam-
ple, statement ”p = 100;” changes lvalue ”p”. These
however involve data dependence analysis, which is
FAST TRANSPARENT VIRTUAL MEMORY FOR COMPLEX DATA PROCESSING IN SENSOR NETWORKS
29

difficult in the presence of pointers because point-
ers can cause subtle and complex data dependences.
(Atkinson and Griswold, 1998; Horwitz et al., 1989).
We currently take a conservative strategy that assumes
pointers may point to arbitrary positions in memory.
Statements using pointer de-referencing lvalues de-
pend on all lvalues and statements always depend on
pointer de-referencing lvalues.
5.3 Cache Index Buffering
Data intensive programs in sensor networks, like im-
age processing, are generally featured by high locality
in memory accessing, which has been made use of by
the caches. Caching eliminates most secondary stor-
age access, however the address translation overhead
is high when VM is frequently accessed. Due to the
spatial locality, most successive address translations
refers to the same cache block. A large portion of
address translation overhead can be eliminated if re-
dundant address translations can be suppressed.
The flexibility of C code virtualization enables us
to take further advantage of this feature. Rather than
saving the last resolved address as in assembly virtu-
alization, we use multiple cache index buffers to save
the cache indexes of the resolving physical addresses
while reading or writing lvalues. Cache index buffers
are variables of byte type which are used to hold the
cache indexes. Different cache index buffers are used
for different lvalues. Upon an lvalue access, the cor-
responding cache index buffer are passed to the vir-
tual address translation routine and the cache index
in the buffer is checked before the original address
translation progress. If the cache block indexed by
the cache index buffer still matches the resolving vir-
tual address, the address translation progress is highly
boosted because the physical address to caches can be
computed from cache index directly.
We do not assign each lvalue different cache in-
dex buffers. Different lvalues may be within the same
cache block, so it would be reasonable and prefer-
able to let two or more lvalues share one cache in-
dex buffer. FaTVM assign cache index buffers to
lvalues according to their ”lvalue bases”. The lvalue
base of an lvalue can be derived using rules in table
1. The main idea is that two lvalue of same lvalue
base should in high possibility be close to each other
in memory.
Low level functions are usually called by upper
level functions for multiple times during the execu-
tion. For example, image convertion routine may
call DCT transformation function for each continu-
ous data block. So, it is obvious that lvalues accessed
in different DCT transformation function invocations
Table 1: Lvalue base derivation rules.
lvalue Types Derived lvalue Base
variable VarBase variable
variable.offset VarBase variable
array[index] VarBase array
*pointer MemBase pointer
*(pointer+val) MemBase pointer
*(pointer).offset MemBase pointer
are contiguous in memory. We make cache index
buffers to be global so that cached indexes will not be
lost crossing function calls. Since the size of a cache
index buffer is just one byte, the RAM cost of cache
index buffers is acceptable.
Using cache index buffers is able to eliminate
much unnecessary address translations thus reduce
cost of address translations which is responsible for
a great portion of virtual memory overhead. More de-
tailed evaluation of cost reduction benefit by cache
index buffering is stated in section 7.
5.4 Virtualization Inlining
Part of lvalue virtualization code is simple enough to
inline them, including the checking of the destination
address to determine if it is a virtual address, and the
lvalue accessing routine using cache index buffer. The
inlining can eliminate function invocations whenever
block index is hit. Supporting more complex inlining
shows superiority of C code virtualization compared
to assembly virtualization.
6 IMPLEMENTATION ISSUES
In this section, we discuss some subtle implementa-
tion issues that we came across during the develop-
ment of FaTVM. The issues may relate to the under-
lying micro-processor or instruction set.
Variables in virtual memory need to be initialized
just like that in physical memory. FaTVM initializes
data sections in virtual memory when booted. Al-
though this may take considerable time if data sec-
tions are large, it is not a severe problem because it is
carried out only when the node is booting.
Cortex-M3 supports unaligned memory access to
achieve flexible memory operations. However, this
brings extra difficulty to the development of FaTVM.
In the presence of unaligned memory access, one load
or store instruction may access a range of memory
crossing boundary of two successive blocks(cross-
block accessing). We have addressed this issue by
read the adjacent Micro-SD block of the accessing
SENSORNETS 2012 - International Conference on Sensor Networks
30

/* original IT-block */
ite cc
strcc r2, [r6, r4]
ldrcs r3, [r6, r4]
/* adapted IT-block */
it cc
strcc r2, [r6, r4]
it cs
ldrcs r3, [r6, r4]
Figure 8: Dividing an IT-block into two IT-blocks.
Micro-SD block to the adjacent cache before execut-
ing the final load or store instruction. This may in-
crease cache misses slightly since the adjacent cache
has to be re-associated. Fortunately this condition is
rare in program execution according to our observa-
tions and can be eliminated by careful data structure
organization. The overhead of handling cross-block
accessing is negligible.
If-Then condition(IT) instruction
1
in Cortex-M3
thumb2 instruction set had brought difficulties in im-
plementing assembly virtualization. LDR/STR in-
structions in IT block can not be translated if it is
not the last instruction inside the IT block because a
branch or any instruction that modifies the PC must
either be outside an IT block or must be the last in-
struction inside the IT block. To address this problem,
one IT-block containing LDR/STR instructions will
be divided into two or more IT-blocks if necessary to
make sure that LDR/STR instructions are always the
last instructions in IT-blocks. An instance of trans-
formation is shown in figure 8. The STR instruction
is not the last instruction of the original IT-block, re-
quiring the IT-block be transformed. This is an issue
specific to ARM instruction sets with IT-block.
7 EVALUATION
In this section, we evaluate the efficiency of FaTVM
to verify its usability. We examined the elementary
cost of address translation, cache performance, sec-
ondary storage accessing cost, etc to verify our design
choices.
To evaluate the performance of real data-intensive
applications, we have ported several well-known data
processing algorithms to use FaTVM, and the execu-
tion result are shown and analyzed.
7.1 Caching Evaluation
Performance metrics of caching includes:
• cache searching overhead,
1
The IT (If-Then) instruction makes up to four following
instructions (the IT block) conditional. The conditions can
be all the same, or some of them can be the logical inverse of
the others. (cited from ARM Compiler toolchain Assembler
Reference).
Table 2: Cache miss rates of different configurations.
• cache miss rate,
• secondary storage accessing overhead.
fully associative cache requires searching in a cache
list one by one to find the matched cache. It is thus
less efficient than set associative cache. However, we
do not evaluate the exact cost of cache searching be-
cause cache searching overhead is minor compared to
secondary storage accessing overhead, and in C code
virtualization, cache index buffering is able to elimi-
nate most of cache searching overhead.
7.1.1 Cache Miss Rate Evaluation
Cache miss rate is of critical importance to the per-
formance of virtual memory since secondary access
overhead is high. The miss rates for different cache
configurations are shown in figure 2. The result is
acquired by emulating a memory access trace which
is acquired by running JPEG to BITMAP program
on FaTVM. Obviously miss rate raise as the memory
footprint reduce. For each fixed RAM overhead, we
examined different cache way settings to find the op-
timal setting. When the count of cache sets increase,
the way of cache decrease. Count of cache set being
1 is equivalent to fully associative caches. The miss
rates increase as the count of cache sets increase, and
fully associative caches has achieved the least miss
rates.
7.1.2 Basic Memory Operation Evaluation
The overhead of FaTVM accessing different memory
regions is shown in table 3.
Local variables in functions and static or global
variables specified to reside in RAM are accessed
at native speed. These variables are accessed fre-
quently without incurring VM overhead. Memory
access (without swap) using assembly virtualization
takes 207 cycles, which is the total overhead of as-
sembly wrapping, address translation and RAM ac-
FAST TRANSPARENT VIRTUAL MEMORY FOR COMPLEX DATA PROCESSING IN SENSOR NETWORKS
31
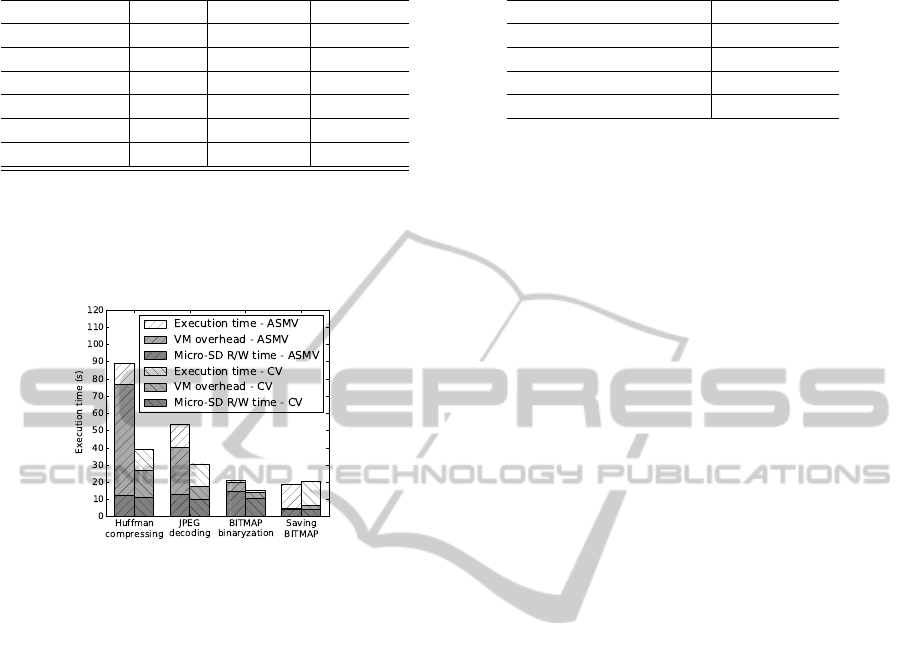
Table 3: FaTVM basic operation overheads.
Access Type Count Time Cycles
Native 10M 417 ms 3.0
AV 10M 28787 ms 207.3
AV-swap 1 3.3 ms 240637.5
CV-CIBHit 10M 16968 ms 54.1
CV-CIBMiss 10M 74269 ms 127.2
CV-swap 1 3.3 ms 240637.5
AV: Virtual Memory using assembly virtualization.
CV: Virtual Memory using C code virtualization.
CIBHit: Cache index buffer hit.
CIBMiss: Cache index buffer miss.
swap: Swap due to cache missing.
Figure 9: Algorithm for local image write back.
cessing. Memory access using C code virtualization
only 54 cycles to access memory when the cache in-
dex buffer hit. Memory access using C code virtu-
alization takes less cycles than memory access using
assembly virtualization even when the cache index
buffer misses because C code virtualization does not
have the overhead assembly wrapping.
7.1.3 Program Performance
We evaluate FaTVM performances using a set of typ-
ical programs. Figure 9 shows the execution time of
programs.
The Micro-SD access overhead is small compared
to the VM overhead or the total execution times. The
VM overhead consists of Micro-SD access overhead
and overhead of address translation. For the first two
programs, the overhead of address translation takes
most of the execution time when using assembly vir-
tualization and C code virtualization brings much less
address translation overhead compared to assembly
virtualization. Table 4 shows the CIB(cache index
buffer) hit rates of the programs. The CIB hit rates
are all above 90 percent and for simple data process-
ing (i.e. BITMAP binaryzation and BITMAP saving),
the CIB hit rates can even be more than 99 percent. So
high CIB hit rates have eliminated the majority of the
Table 4: Cache index buffer hit rates of programs.
Program CIB hit rate
Huffman compressing 94.75%
JPEG decoding 90.64%
BITMAP binaryzation 99.85%
Saving BITMAP 99.71%
address translation overhead.
The topmost portion of execution time is caused
by the algorithm calculations in program, which
would be the total execution time if the physical mem-
ory is large enough to hold all program data mak-
ing virtual memory unnecessary. BITMAP binaryza-
tion algorithm is very simple and has minor calcu-
lation time. Saving BITMAP takes most time writ-
ing BITMAP data to a file on Micro-SD card, so the
VM overhead is small compared to program execu-
tion time.
For complex data processing algorithms(i.e. huff-
man compressing and JPEG decoding), the VM over-
head of FaTVM using C code virtualization is tolera-
ble since these complex data processing should not be
carried out frequently.
8 RELATED WORK
Virtual memory(Denning, 1970) has been an impor-
tant research subject in traditional operating system
research for a long time. It provides applications with
isolated large flat address spaces which greatly sim-
plified development of reliable programs, and prevent
programs from ruining each other’s address space.
However, traditional virtual memory researches are
generally based on MMUs, so they are not usable in
MMU-less embedded systems.
Softvm(Jacob and Mudge, 2001) implements
software-managed address translation without TLBs,
however it is still designed for conventional computer
systems.
MEMMU(Bai et al., 2009) proposed an auto-
mated compile-time and runtime memory expansion
mechanism to increase the amount of usable memory
in MMU-less embedded systems by using data com-
pression, however available memory can only be in-
creased by up to 50%.
There have already been several studies on vir-
tual memory in sensor networks. Most previous work
was trying to support large complex programs (e.g.
TinyDB(Madden et al., 2005)) on sensor nodes. The
virtual memory was generally assumed to be rela-
tively small and node interactivity was the major con-
sideration among application performance metrics.
SENSORNETS 2012 - International Conference on Sensor Networks
32

Our work differs from previous work largely in
that we were trying to provide a large efficient virtual
memory for mass data processing. Most variables ac-
cessed in data processing are assumed to be in virtual
memory. So, our work mainly focused on reducing
the overhead of address translations and the miss rates
of programs.
t-kernel(Gu and Stankovic, 2006) provides
software-based virtual memory called DVM which
provides to the user application a flat virtual memory
space which can be much larger than the physical
memory space of the host node. t-kernel uses assem-
bly virtulization to access virtual memory. Evaluation
of t-kernel showed high efficiency in memory access
performance. Accessing heap without swap takes
only 15 cycles. We believe it is because that address
translation of t-kernel DVM is simpler than that of
FaTVM, which is partly due to the simpler address
modes of sensor platform MCU. However, t-kernel
DVM has a much higher miss rate than FaTVM. The
current t-kernel implementation allocates 64 data
frames in RAM as buffer for flash access, and the
miss rate is about 10% for ”slidingwin” application,
tens of times of the miss rate of FaTVM. So, we
argue that the caching scheme and the assembly
virtualization method in t-kernel DVM is not applica-
ble for sensor network programs with complex data
processing because of the high overhead of secondary
storage access. We didn’t evaluate t-kernel’s perfor-
mance in this paper because t-kernel is not ported to
STM32 MCU.
ViMem(Lachenmann et al., 2007) brings vir-
tual memory support to TinyOS(2.x Working Group,
2005). The developer adds tags to nesC(Gay et al.,
2003) source code to place variables to the virtual
memory. ViMem creates an efficient memory layout
based on variable access traces obtained from simu-
lation tools to reduce virtual memory overhead. The
effect would be significant for traditional sensor net-
work programs, however it would be useless when
the program is accessing a large variable sequentially
or randomly, which is common in complex data pro-
cessing. Further more, it is not possible to reference
a variable in virtual memory using a normal pointer
variable in ViMem. Pointer variables in virtual mem-
ory have to be tagged with the attribute ”@vmptr”.
Since data elements in virtual memory are not nec-
essarily contiguous, casting variables to types of a
different size is not allowed, neither is pointer arith-
metic. We believe that virtual memory transparency
and flexible pointer operation is vital for porting or
implementing complex data processing algorithms.
Recently, Enix(Chen et al., 2010) supplies soft-
ware segmented virtual memory for code memory by
code modification and also uses a Micro-SD card as
secondary storage. However Enix does not provide
virtual memory for data segments because of high
run-time overhead.
9 CONCLUSIONS AND FUTURE
WORK
We have designed and implemented a virtual mem-
ory for data-intensive applications in sensor networks,
making it possible for sensor nodes to carry out
complex computations with heavy memory footprints
without using energy-hungry MCUs equipped with
much larger RAM. We had been focusing on reducing
virtual memory overheads in different aspects includ-
ing cache management, address translation, Micro-
SD accessing, etc to make achieve acceptable perfor-
mance for sensor network applications. We showed
that C code virtualization enables more flexible opti-
mizations to take advantages of the high locality of
memory access pattern of data processing programs
in sensor networks.
Either the overhead of address translation, or the
overhead of secondary storage accessing is consider-
able and worth more works to further improve the effi-
ciency of virtual memory. We have been using Micro-
SD as secondary storage since it is more convenient to
use. However, we expect performance promotion if
NAND flash with an FTL tailored for virtual memory
is introduced to FaTVM.
Our evaluation demonstrated that common data
processing algorithms generate memory footprints
with high spatial and temporal locality. Currently,
the address translation overhead is still remarkable
within the total execution time. More sophisticated
code analysis and transformation may further reduce
virtual memory overhead.
Sensor nodes are normally flashed with programs
for specialized applications, that is to say, the pro-
grams reside on sensor nodes and execute for long
periods. This has made it feasible to optimize virtual
memory specifically for certain applications or con-
figure virtual memory parameters accordingly to bet-
ter serve the applications. Different applications have
different memory access patterns, which can be fur-
ther analyzed to improve virtual memory efficiency.
ACKNOWLEDGEMENTS
This work was supported by the project ”Advanced
Sensor Network Platform Research” in Zhejiang Uni-
FAST TRANSPARENT VIRTUAL MEMORY FOR COMPLEX DATA PROCESSING IN SENSOR NETWORKS
33

versity (No. 2010X88X002-11).
REFERENCES
2.x Working Group, T. T. (2005). Tinyos 2.0. In Pro-
ceedings of the 3rd international conference on Em-
bedded networked sensor systems, SenSys ’05, pages
320–320, New York, NY, USA. ACM.
Atkinson, D. C. and Griswold, W. G. (1998). Effective
whole-program analysis in the presence of pointers. In
Proceedings of the 6th ACM SIGSOFT international
symposium on Foundations of software engineering,
SIGSOFT ’98/FSE-6, pages 46–55, New York, NY,
USA. ACM.
Bai, L. S., Yang, L., and Dick, R. P. (2009). Memmu: Mem-
ory expansion for mmu-less embedded systems. ACM
Trans. Embed. Comput. Syst., 8:23:1–23:33.
Chen, Y.-T., Chien, T.-C., and Chou, P. H. (2010). Enix:
a lightweight dynamic operating system for tightly
constrained wireless sensor platforms. In Proceed-
ings of the 8th ACM Conference on Embedded Net-
worked Sensor Systems, SenSys ’10, pages 183–196,
New York, NY, USA. ACM.
Chung, T.-S., Park, D.-J., Park, S., Lee, D.-H., Lee, S.-W.,
and Song, H.-J. (2009). A survey of flash translation
layer. Journal of Systems Architecture, 55(5-6):332 –
343.
Crossbow Technology, I. (2007). Imote2 datasheet. Avail-
able at http://wsn.cse.wustl.edu/images/e/e3/Imote2
Datasheet.pdf.
Crossbow Technology, I. (2009a). Micaz specs. Available at
http://www.xbow.com/Products/Product pdf fles/Wire
less pdf/MICAz Datasheet.pdf.
Crossbow Technology, I. (2009b). Telosb specs. Available
at http://www.xbow.com/Products/Product pdf files/
Wireless pdf/TelosB Datasheet.pdf.
Denning, P. J. (1970). Virtual memory. ACM Comput. Surv.,
2:153–189.
Gay, D., Levis, P., von Behren, R., Welsh, M., Brewer, E.,
and Culler, D. (2003). The nesc language: A holistic
approach to networked embedded systems. In Pro-
ceedings of the ACM SIGPLAN 2003 conference on
Programming language design and implementation,
PLDI ’03, pages 1–11, New York, NY, USA. ACM.
Gu, L. and Stankovic, J. A. (2006). ¡i¿t-kernel¡/i¿: pro-
viding reliable os support to wireless sensor networks.
1182809 1-14.
Hennessy, J., Patterson, D., and Goldberg, D. (2003). Com-
puter architecture: a quantitative approach. Morgan
Kaufmann.
Horwitz, S., Pfeiffer, P., and Reps, T. (1989). Depen-
dence analysis for pointer variables. In Proceedings
of the ACM SIGPLAN 1989 Conference on Program-
ming language design and implementation, PLDI ’89,
pages 28–40, New York, NY, USA. ACM.
Jacob, B. and Mudge, T. (2001). Uniprocessor virtual mem-
ory without tlbs. IEEE Trans. Comput., 50:482–499.
Lachenmann, A., Marr
´
on, P. J., Gauger, M., Minder, D.,
Saukh, O., and Rothermel, K. (2007). Removing
the memory limitations of sensor networks with flash-
based virtual memory. SIGOPS Oper. Syst. Rev.,
41:131–144.
Ltd, A. (2010). Cortex-m3 technical reference manual.
Available at http://infocenter.arm.com/help/topic/com
.arm.doc.ddi0337i/DDI0337I cortexm3 r2p1 trm.pdf.
Madden, S. R., Franklin, M. J., Hellerstein, J. M., and
Hong, W. (2005). Tinydb: an acquisitional query
processing system for sensor networks. ACM Trans.
Database Syst., 30(1):122–173.
Necula, G., McPeak, S., Rahul, S., and Weimer, W. (2002).
Cil: Intermediate language and tools for analysis and
transformation of c programs. In Horspool, R., edi-
tor, Compiler Construction, volume 2304 of Lecture
Notes in Computer Science, pages 209–265. Springer
Berlin / Heidelberg.
Park, S.-y., Jung, D., Kang, J.-u., Kim, J.-s., and Lee, J.
(2006). Cflru: a replacement algorithm for flash mem-
ory. In Proceedings of the 2006 international con-
ference on Compilers, architecture and synthesis for
embedded systems, CASES ’06, pages 234–241, New
York, NY, USA. ACM.
Soro, S. and Heinzelman, W. (2009). A survey of vi-
sual sensor networks. Advances in Multimedia,
2009(640386):1–21.
STMicroelectronics (2011). Stm32f103ze datasheet. Avail-
able at http://www.st.com/internet/com/TECHNICA
L
RESOURCES/TECHNICAL LITERATURE/DAT
ASHEET/CD00191185.pdf.
SENSORNETS 2012 - International Conference on Sensor Networks
34
