
ENERGY-MINIMIZATION BASED MOTION ESTIMATION
USING ADAPTIVE SMOOTHNESS PRIORS
Tarik Arici
1
and Vural Aksakalli
2
1
Department of Electrical Engineering, Istanbul Sehir University, Istanbul, Turkey
2
Department of Industrial Engineering, Istanbul Sehir University, Istanbul, Turkey
Keywords:
Energy Minimization, Approximation Algorithms, Primal-dual Method, Motion Estimation.
Abstract:
Energy minimization algorithms are used in low-level computer vision applications for labeling tasks such
as stereo-disparity estimation, image restoration, motion estimation, and optical flow. The energy function
involves terms that evaluate the goodness of a solution in terms of a prior knowledge in addition to data terms.
The most widely used priors are smoothness-based priors, which enhance the quality significantly. However,
the smoothness assumption is notvalid across discontinuities (e.g. motion boundaries). We present a method to
update the weights of smoothness terms using the dual problem when the approximation algorithm is iterative.
The dual of the primal energy minimization problem is used to infer about the validity of the smoothness prior
and impose it more correctly at each iteration. We demonstrate the effectiveness of this method against the
state-of-the-art in the optical flow literature.
1 INTRODUCTION
Energy minimization refers to designing an energy
function that describes the desired properties of a
solution and its minimization to obtain a good so-
lution. Most problems in computer vision such as
motion/optical-flow estimation, stereo-disparity esti-
mation, video synopsis, image formation modeling,
texture segmentation are ill-posed (Boykov et al.,
2001; Rav-Acha et al., 2008; Rav-Acha et al., 2006;
Hofmann et al., 1996) in the Hadamard sense: many
solutions exist and choosing one of the many solu-
tions based solely on data results in over-fitting of the
parameters. A model with over-fitted parameters is
not good in prediction and also not effective in gener-
alizing beyond data for truly explaining the observed
phenomenon.
An energy function consists of a data term and
a prior knowledge term to discriminate between the
large number of solutions. Energy functions are of-
ten difficult to minimize because the solution space is
generally exponentially large depending on the size
of the problem. The data energy typically has a
large number of non-convexities, which exacerbates
the problem. One of the most commonly used prior
knowledge is the smoothness of the solution, which is
shown to be NP-hard (Boykov et al., 2001).
Energy minimization problems can be formulated
as labeling problems. A typical energy is of the form
E(v) =
∑
b∈B
D
b
(l
b
) + λ
∑
b,a∈N
V
b,a
(l
b
, l
a
), (1)
where D
b
is the data fidelity term, V
b,a
represents the
prior knowledge as a penalty cost between two inter-
acting sites b and a. B is the set of sites, N is the set
of sites that interact with each other, and l
b
is the label
for site b. With n
b
sites and n
l
labels, the number of
possible labellings is n
n
l
b
.
NP-hard labeling problems will require exponen-
tial time to find the global minimum. To achieve prac-
tical algorithms, local search methods can be used
to refine an initial solution iteratively (Papadimitriou
and Steiglitz, 1998). When there are many local
minimums, approximation algorithms that do a lo-
cal search are likely to get stuck at a local minimum.
The local minimums are created mostly due to the
non-convexities in D
b
. Fortunately, V
b,a
is generally
convex because the prior knowledge is commonly a
norm of a distance measure on the solution space or
its derivatives. Hence, increasing the weight ofV
b,a
in
the energy will help with the convergence of the al-
gorithm. But labels have discontinuities, which make
V
b,a
invalid for specific interactions between sites and
increasing its weight will falsely impose an invalid
prior knowledge on the labels. To solve this problem,
we propose to use the dual problem of the primal en-
201
Arici T. and Aksakalli V..
ENERGY-MINIMIZATION BASED MOTION ESTIMATION USING ADAPTIVE SMOOTHNESS PRIORS.
DOI: 10.5220/0003805202010207
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 201-207
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

ergy problem. The primal problem for each iteration
of a label is expressed as a linear programming prob-
lem and the equivalence of its Lagrangian to the en-
ergy under specific choices of the Lagrangian multi-
pliers is shown. The dual solution is used to correctly
impose the prior knowledge by adapting the weights
in the smoothness prior via complementary slackness
conditions.
In the next section we give a review of prior art in
energy minimization. In Section 3, we present our
primal-dual method for energy function design us-
ing a spatial smoothness prior. Finally, in Section 4,
we demonstrate the power of our proposed method
against the state-of-the-art in the optical flow litera-
ture.
2 RELATED WORK
Prior works on energy-minimization determines the
energy function at the beginning by fixing the pa-
rameters manually, and focus on efficient minimiza-
tion techniques. Energy-minimization is commonly
used in computer vision applications (Rav-Acha et al.,
2008; Rav-Acha et al., 2006), and it is applied to
pixel level stereo-disparity estimation, which is simi-
lar to motion estimation in essence (Kolmogorov and
Boykov, 2002; Boykov and Veksler, 2006; Veksler,
1999).
The majority of prior art focuses on the mini-
mization problem rather than the design of the en-
ergy function. Graph-cut methods are powerful in
quickly converging to good local minimums due to
their ability to do large moves (Kolmogorov and
Boykov, 2002; Boykov and Veksler, 2006; Veksler,
1999). However, they are computationally complex
and are not hardware-friendly since they operate on
node lists to find max flows in a graph. Modifying
energy functions to avoid falsely imposing smooth-
ness priors across discontinuities is proposed for ob-
ject segmentation but the discontinuity is inferred us-
ing the contrast in the pixel intensities (Kohli and
Torr, 2007). For optical flow changing the weights us-
ing the image gradients is also proposed (Werlberger
et al., 2009). In these approaches, although the en-
ergy is adapted to the image (or data in general), it is
still fixed throughout the iterations. Also, the adapta-
tion may bias the solutions towards a bad local min-
imum since in some cases contrast in pixel intensity
may not produce discontinuities/boundaries in the la-
bels. Instead, we propose to modify the energy using
the labels from the previous iteration, which becomes
more reliable as the minimization algorithm improves
the solution.
Belief propagation techniques are also used for
minimizing the energy (Meltzer et al., 2005). The re-
sults achieved with belief propagation techniques are
similar to graph-cut methods in quality.
Application of energy minimization to various
computer vision problems is done by introducing
new terms in the energy function to utilize prior in-
formation for the specific problem. For example,
video synopsis tries to compress an image sequence
in time, hence, requires the use of energy terms that
imposes this via temporal energy terms (Rav-Acha
et al., 2006). Another application such as unwrap-
ping the surface of an object for video editing requires
some other energy terms related to tracking and mo-
saic stitching (Rav-Acha et al., 2008).
In this work, we study the energy design aspect of
energy minimization that uses first-order smoothness
priors. We propose a primal-dual linear programming
method that utilizes labels from the previous iteration
to modify the smoothness priors in order to take the
discontinuities into account.
3 PRIMAL-DUAL METHOD FOR
ENERGY-MINIMIZATION
3.1 Formulation of a Move as a Linear
Program
We define a move as a change of labels to a particular
candidate label, ρ. A large move can change a group
of site’s labels to ρ, keeping all other labels the same
as the pre-move labels l
∗
, while a standard-move can
only change a single site’s label to ρ.
We formulate the move problem for candidate la-
bel ρ as a linear programming problem (move-LP) in
the canonical form
min
∑
b∈B
x
b
D
b
(ρ) + (1− x
b
)D)b(l
∗
b
) (2)
subject to
x
b
− x
a
≥ −p
ba
, x
a
− x
b
≥ −p
ba
, ∀{b, a} ∈ N ,
x
b
≥ 0, −x
b
≥ −1, ∀b ∈ B,
where l
∗
is the pre-move labels, ρ is the candidate
label of the move, and p
ba
is the probability of b
and a to be on different objects
1
. x is the variable
of the move-LP, which is in [0, 1]. x
b
= 1 indicates
that l
b
= ρ, and x
b
= 0 indicates that l
b
= l
∗
b
. For
x
b
∈ (0, 1), a fractional move is indicated, which can
1
Generally, p
ba
’s are neither known nor directly ob-
served from data. However as discussed in Section 3.3 our
technique does not require the knowledge of p.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
202

be interpreted as b takes on ρ with probability x
b
and
retains l
∗
b
with probability 1 − x
b
. The advantage of
expressing the move problem as a linear problem is
that it enables fractional moves during the iterations.
To avoid confusion, it is important to note that the
above equation is not a relaxed version of the en-
ergy minimization problem given in (1), but its La-
grangian with specific set of multipliers is identical to
(1), which will be proved next.
The cost term in (2) is a weighted sum of data
terms with labels ρ and l
∗
b
. Two inequality con-
straints are imposed on the move to achieve smooth-
ness: x
b
− x
a
≥ −p
ba
and x
a
− x
b
≥ −p
ba
. They are
canonical form linear constraints for |x
b
− x
a
| ≤ p
ba
.
With these constraints neighbor sites that are likely to
move together are forced to move together depending
on the probability, p
ba
, of b and a to have different
labels. Hence, smoothness is enforced on actions but
not on the labels. However, a sequence of smooth
moves will create a smooth label set in the end.
We next write the Lagrangian for the move-LP in
(2),
L(x, β, γ, κ) =
∑
b∈B
x
b
D
b
(ρ) + (1−x
b
)D
b
(l
∗
b
) +
∑
{b,a}∈N
β
ba
(−x
b
+ x
a
− p
ba
) + β
ab
(−x
a
+ x
b
− p
ba
) +
∑
{b,a}∈(N)
−γ
b
x
b
+ κ
b
(x
b
− 1), (3)
where β, γ, and κ are positive Lagrange multipliers
associated with their corresponding inequality con-
straints.
Lemma 1. A binary solution
2
x of the move-LP cor-
responds to a move from l
∗
to l
LP
.
Proof. By the definition of x, l
b
= ρ if x
b
= 1, and
l
b
= l
∗
b
if x
b
= 0, which means a change of labels to
ρ while keeping all other labels same as in l
∗
. There-
fore, a binary x corresponds to a move from the pre-
vious label set l
∗
to a new label set l
LP
, which is the
solution to our linear program.
Using Lemma 1, and the Lagrangian in (3) yields:
Theorem 2. The Lagrangian of the move-LP with a
binary solution x is equal to the energy, E(l
LP
), if the
Lagrangian multipliers satisfy
β
ba
p
ba
= β
ab
p
ab
= −
1
2
λV
b,a
(l
∗
b
, l
∗
a
) s.t. x
b
= 0, x
a
= 0
β
ba
= 0, β
ab
= 0 s.t. x
b
= 1, x
a
= 1
β
ba
= 0.β
ab
(1− p
ba
) = λV
b,a
(ρ, l
∗
a
) s.t. x
b
= 1, x
a
= 0
β
ba
(1− p
ba
) = λV
b,a
(l
∗
b
, ρ), β
ab
= 0 s.t. x
b
= 0, x
a
= 1
γ
b
= 0, κ
b
= 0,
(4)
2
A binary solution is defined such that each component
of x is either zero or one.
where l
LP
is a move away from l
∗
.
Proof. We skip the proof due to space limitations.
3
3.2 Sub-optimality of the Energy
Theorem 2 shows that for a specific choice of the La-
grangian multipliers, the Lagrangian of the move-LP
problem is equal to the energy under a binary move.
The conditions for the Lagrangian multipliers for this
equality may not be the best in terms of convergence
and energy function design, because the Lagrangian
multipliers are chosen without utilizing any informa-
tion learnt from the iterations. By intelligently choos-
ing the Lagrangian multipliers, contributions of the
constraints in the Lagrangian can be better adjusted.
This will especially improve the application of the
smoothness constraints for sites that are in the vicinity
of a discontinuity.
To achieve our goal, we utilize the primal-dual
schema (Papadimitriou and Steiglitz, 1998). This
technique constructs a feasible solution of the dual
problem and an integer solution of the primal prob-
lem iteratively. Since a solution of the dual problem
also provides lower bound on the primal problem by
the weak duality, one can compute a feasible solution
for the dual problem first which then can be used to
find the corresponding primal solution via the com-
plementary slackness conditions (Papadimitriou and
Steiglitz, 1998).
Our method differs from the primal-dual schema
by the way complementary slackness conditions
(CSCs) are utilized. In the conventional primal-dual
schema, CSCs are used to obtain the integer primal
solution from the dual solution. However, we want
to design a uniform algorithm, which has one type of
computation kernels, which iteratively update the la-
bels by substituting in the energy. Iterations of the
same forms of energy function are more suitable for
parallel implementations rather than an approach that
involves minimizing an energy followed by solving
the CSCs. In our method, CSCs are used to infer if
a constraint of the move-LP is tight or slack. A slack
constraint means the constraint is satisfied as a strict
inequality, and a tight constraint means the constraint
is satisfied with equality. By learning if a constraint
is slack or tight via the dual feasible solution and the
CSCs, the Lagrangian multipliers can be adjusted be-
cause a slack constraint means our prior information
agrees with our current solution, and a tight constraint
mean our prior information disagrees with our current
3
The proof can be found in the first author’s Ph.D thesis.
ENERGY-MINIMIZATION BASED MOTION ESTIMATION USING ADAPTIVE SMOOTHNESS PRIORS
203

solution. Compared to choosing the Lagrangian mul-
tipliers as specified by the condition of Theorem 2
in an ad hoc manner, our primal-dual method uses
the feasible dual solution to determine the Lagrangian
multipliers, which is then used in the Lagrangian that
is to be minimized. We present the dual problem of
energy minimization in the following section.
3.3 The Dual Problem
We start with rewriting the move-LP problem in (2) in
matrix form for a compact representation. The primal
problem is
min
x
c
T
x+ ¯c
T
(1− x) (5)
subject to
Ax ≥ −p
x ≥ 0, −x ≥ −1,
where c, ¯c, x ∈ R
|N |
, and A ∈ R
|N |×|B|
such that c
b
=
D
b
(ρ) and ¯c
b
= D
b
(v
∗
b
), and A
ki
= 1, A
kj
= −1 for
any k
th
pair {i, j} ∈ N . It is straightforward to con-
struct the remaining labels so that the above problem
is equal to the original move-LP problem. The La-
grangian can be formed similar to (3):
L(x, β, γ, κ) = c
T
x+ ¯c
T
(1− x) +β
T
(−p− Ax)−
γ
T
x+ κ
T
(x− 1)
= (c− ¯c− A
T
β− γ − κ)
T
x− β
T
p− κ
T
1
= m
T
x− β
T
p− κ
T
1,
(6)
where m is substituted for c − ¯c − A
T
β − γ − κ for
compactness. One can see that because of the way
the constraints of the primal problem are utilized in
the Lagrangian, the Lagrangian is always smaller than
the primal problem’s objective
L(x, β, γ, κ) ≤ c
T
x+ ¯c
T
(1− x), (7)
given that x is a feasible point in (5).
The dual function is a minimization of (6) on x:
g(β, γ, κ) = inf
x
L(x, β, γ, κ)
=
(
− β
T
p −κ
T
1 if m = 0
− ∞ otherwise
(8)
For the dual function to exist m must be equal to 0.
It is straightforward to show that the dual function
provides lower bounds on the more complex primal
problem’s optimal value by observing (7) and (4).
The dual problem is the maximization of
the dual function, which becomes a minimization by
changing the sign of the objective function:
min
β,γ,κ
β
T
p+ κ
T
1 (9)
subject to
c− ¯c− A
T
β− γ− κ = 0, (10)
The dual problem turns out to be the minimum cost
flow problem with costs given as the probabilities of
two sites belonging to different objects, which can be
solved using the maximum flow algorithms. The re-
quired flow is specified by c− ¯c− A
T
β− γ− κ, while
flows across discontinuities (high p values) are dis-
couraged. We are looking for a feasible solution of
the dual problem, not necessarily the optimal solu-
tion. An optimal solution requires more computation
and knowledge of p, which specifies the probability of
two sites having different blocks, which is not known.
p values can be inferred from data similar to (Kohli
and Torr, 2007) by using intensity gradient, but in this
work we will use a feasible solution of the dual prob-
lem that does not require the knowledge of p.
Dual feasibility condition is specified by the re-
quired flow condition given by
c− ¯c− A
T
β− γ− κ = 0, (11)
And β can be estimated by
ˆ
β = A
†
(c− ¯c− γ), (12)
where A
†
is the pseudo-inverse of A, κ is set to zero
in the second equation, because the dual function that
we want to minimize is an increasing function of κ
4
.
Since A
†
(c− ¯c) can be negative,the non-negativityas-
sumption of
ˆ
β required for the derivation of the dual
function can be violated. Hence, we need to thresh-
old its components to zero from below. Since γ is
unknown, one can choose γ to minimize the need for
this clamping operation. At any rate, we can rewrite
(12) to get the dual feasibility condition (DFC)
ˆ
β = max{0, A
†
(c− ¯c)}. (13)
Using a feasible solution for
ˆ
β of the dual problem, we
can understand if the constraints of the primal prob-
lem are loose or tight, which can be used to re-design
the energy function for the next iteration. Next sec-
tion discusses this relation between
ˆ
β and the smooth-
ness constraints, and also how it is used for energy
re-design.
4
We note that κ = 0 does not necessarily produce the
optimal solution of the dual problem.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
204

3.4 The Primal-dual Relation
First, we describe a method to solve for β. To have
a unique solution for the DFC equation, A
†
must be
well-defined. However, by the way we defined the
constraints in the move-LP each block pair {a, b} has
two constraints
x
b
− x
a
≥ −p
ba
(14)
x
a
− x
b
≥ −p
ba
. (15)
To find a relation between β and move-LP con-
straints, we utilize the dual complementary slackness
conditions (Papadimitriou and Steiglitz, 1998). If the
complementary slackness conditions are satisfied, any
feasible solution x of the primal and β of the dual
problem are optimal. The dual complementary slack-
ness condition (DCSC) is given below.
Either β
ba
= 0 or A
ba
x = −p
ba
, (16)
where {b, a} is any site pair and A
ba
is the row for the
constraint associated with β
ba
. The complementary
slackness conditions are important in the design of
efficient approximation algorithms for complex prob-
lems. These algorithms are called primal-dual based
methods and they try to improve x and β by modi-
fying them in a way that more of their components
satisfy the complementary slackness conditions (Pa-
padimitriou and Steiglitz, 1998).
Our goal for applying the primal-dual method is
to re-design the energy function, which corresponds
to the Lagrangian of the primal problem. The La-
grangian is showed to be equivalent to the energy
function under the conditions on the Lagrangian mul-
tipliers given in Theorem 2. However, our choice of
the constraints were imposed for all sites pairing with
a site, independent of the discontinuity since the un-
known l is what we want to estimate. Fortunately,
ˆ
β reveals some information on the connectedness of
sites with their neighbors by the use of DCSC. DCSC
dictates that if
ˆ
β is non-zero, then the constraint is
binding and must be satisfied with equality. If the con-
straint had been relaxed, the interacting sites would
have chosen different labels. This implies that the two
sites are on different label segments. Hence, the con-
straint that is binding is conflicting with our smooth-
ness of l assumption in that locality, and should be
imposed less by decreasing its contribution in the en-
ergy. To this end, the Lagrangian multipliers must
be inversely related to
ˆ
β, for example by multiplying
with a function f(
ˆ
β) that is decreasing with
ˆ
β and has
range [0, 1]. Hence, by DCSC we propose to update
the β values as
β
DCSC
ba
= f(
ˆ
β
ba
)β
ba
, (17)
where
ˆ
β is a feasible solution of the dual problem
given in (13), and f is a decreasing function of
ˆ
β. Re-
placing Lagrangian multiplier β with β
DCSC
and sub-
stituting κ = 0 from the solution of the dual problem,
Lagrangian in (3) after some simplification becomes
E(v) =
∑
b∈B
D
b
(v
b
) + λ
∑
{b,a}∈N
f(
ˆ
β)V
b,a
(v
b
, v
a
). (18)
The above energy formulation does not isotropi-
cally enforce a smoothness constraint, but adapts the
weights of constraints in the energy with information
derived from the data via the dual problem. This will
enable us to obtain an energy function that is more
powerful to explain labeling across discontinuities.
4 EXPERIMENT RESULTS
We present experiment results using the proposed
method and compare our results with the state of the
art in the optical flow literature. Our implementation
of the proposed method is a hierarchical motion es-
timation algorithm that uses a full resolution and a
half resolution image produced by down-sampling the
full resolution image by two. For each half resolution
block, a motion search is performed to pick the two
best motion vectors to minimize a cost. The cost is
a sum of absolute deviation (SAD) based cost and all
motion vectors in a 2-D search window are evaluated
to find the minimum cost vectors. This way an ini-
tial motion-vector field v
0
is created and refined using
N standard-move iterations. Candidate vectors in re-
duced search window S is used to pick the best-two
standard move for each b. S consists of 18 vectors ob-
tained from a block’s and its eight-connectivityneigh-
borhoods’ best-two vectors. Smoothness cost is de-
rived from blocks in four-connectivity neighborhood
and weights of the neighboring blocks is adapted us-
ing information from the dual problem. Each block is
partitioned to quarter blocks so that a half-resolution
quarter-block matches with a full resolution block in
size. This will increase the reliability of the centered
motion search in full resolution. Also, partitioning
to quarter blocks increases the quality of half reso-
lution vectors in general, since with a smaller block
size block-based translational-motion model is less
problematic for rotation, zooming, and motion bound-
aries. After the partitioning, standard-move iterations
are again applied to refine further, before passing to
full resolution. Execution of our algorithm on a sam-
ple instance of the underlying problem is illustrated
in Figures 1 and 2. FR-FULL, FR-QUARTER, and
FR-QUARTER
2
images in Figures 1 and 2 have res-
olutions of 16x16, 8x8, 4x4 pixel blocks respectively.
ENERGY-MINIMIZATION BASED MOTION ESTIMATION USING ADAPTIVE SMOOTHNESS PRIORS
205
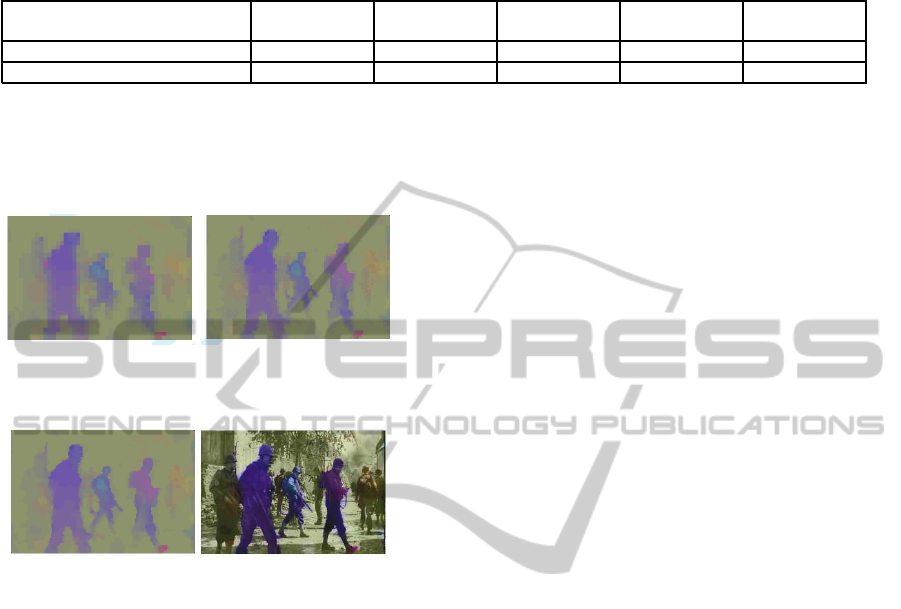
Table 1: Comparison of our DCSC-based method to Weickert et al.’s method on the Middlebury dataset. Mean endpoint error
of our method is comparable, if not superior, to that of Weickert et al.’s method even though our method uses only half the
pixel accuracy.
Mean Endpoint Error Schefflera Wooden Grove Urban Teddy
all disc untext all disc untext all disc untext all disc untext all disc untext
Method of Weickert et al. (2005) 1.12 1.80 0.99 1.07 2.06 1.12 1.23 1.52 1.62 1.54 2.15 0.96 1.38 2.26 1.83
DCSC-based method 1.21 1.77 1.18 0.94 2.03 0.97 1.20 1.57 1.08 1.73 1.90 1.12 1.37 2.16 1.81
The super-imposed image in Figure 4 shows the video
frame with color plane modulated using the estimated
motion vectors.
(a) (b)
Figure 1: (a) FR-FULL and (b) FR-QUARTER.
(a) (b)
Figure 2: (a) FR-QUARTER
2
and (b) Super-imposed im-
age.
We now compare our method’s performance
against that of Weickert et al.’s method (We-
ickert et al., 2005), which is a state-of-the-art
technique in optical flow literature. We use
the Middlebury dataset available on the Web at
http://vision.middlebury.edu/flow for benchmarking
purposes. This dataset has four types of data with
different characteristics and error measures distin-
guished for motion discontinuities and textureless re-
gions. Comparison of our DCSC-based method to
Weickert et al.’s method is given in Table 1. Although
performance of our method is comparable to that of
Weickert et al. (2005) in mean endpoint error, our
method performs better in 4 out of 5 discontinuity
cases; as expected. Our motion vectors operate with
only half pixel accuracy because we are searching in
a reference image upscaled by two. It is therefore
impressive that even though our current implemen-
tation uses only of half available pixels, our method
performs better than that of Weickert et al. (2005) in
10 out of the total 15 cases. This shows that adapt-
ing the smoothness prior using the dual problem is
a promising technique. It is, however, important to
observe that we are not finding the optical flow, but
rather performing motion estimation via motion vec-
tor searching. As future work, we plan to perform
further benchmarking on different datasets and com-
pare our method to other optical flow techniques in
the literature.
5 CONCLUSIONS
Energy minimization enables incorporation of prior
knowledge for improving parameter estimation. Un-
fortunately, the weights of the prior knowledge in the
energy function is not known. We proposed to use a
feasible solution of the dual of the primal minimiza-
tion problem to adjust the weights, which improves
the energy when the prior knowledge is not valid.
In the case of a smoothness prior knowledge, which
is commonly used in computer vision problems, the
dual feasible solution is used to infer about the discon-
tinuities via the dual complementary slackness condi-
tions.
REFERENCES
Boykov, Y. and Veksler, O. (2006). Mathematical Models of
Computer Vision: The Handbook, Graph Cuts in Vi-
sion and Graphics: Theories and Applications. Dover
Publications.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast ap-
proximate energy minimization via graph cuts. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 23(11):1222–1239.
Hofmann, T., Puzicha, J., and Buhmann, J. (1996). Unsu-
pervised segmentation of textured images by pairwise
data clustering. In International Conference on Image
Processing.
Kohli, P. and Torr, P. (2007). Dynamic graph cuts for effi-
cient inference in markov random fields. Pattern Anal-
ysis and Machine Inteligence, 29(12):2079–2088.
Kolmogorov, V. and Boykov, Y. (2002). An experimental
comparison of mincut/max-flow algorithms for energy
minimization in vision. In Energy Minimization Meth-
ods in Computer Vision and Pattern Recognition.
Meltzer, T., Yanover, C., and Weisss, Y. (2005). Globally
optimal solutions for energy minimization in stereo
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
206

vision using reweighted belief propagation. In Inter-
national Conference on Computer Vision, pages 428–
435.
Papadimitriou, C. H. and Steiglitz, K. (1998). Combinato-
rial Optimization: Algorithms and Complexity. Dover
Publications.
Rav-Acha, A., Kohli, P., Rother, C., and Fitzgibbon, A.
(2008). Unwrap mosaics: A new representation for
video editing. ACM Transactions on Graphics (SIG-
GRAPH 2008).
Rav-Acha, A., Pritch, Y., and Peleg, S. (2006). Making
a long video short: Dynamic video synopsis. IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
Veksler, O. (1999). Efficient Graph-Based Energy Mini-
mizatation Methods in Computer Vision. Cornell Uni-
versity.
Weickert, J., Bruhn, A., and Schnorr, C. (2005). Lu-
cas/kanade meets horn/schunck: Combining local and
global optic flow methods. International Journal of
Computer Vision, 61(3):211–231.
Werlberger, M., Trobin, W., Pock, T., Wedel, A., Cremers,
D., and Bischof, H. (2009). Anisotropic huber-l1 op-
tical flow. In British Machine Vision Conference.
ENERGY-MINIMIZATION BASED MOTION ESTIMATION USING ADAPTIVE SMOOTHNESS PRIORS
207
