
ENHANCING MEMORY-BASED PARTICLE FILTER WITH
DETECTION-BASED MEMORY ACQUISITION FOR ROBUSTNESS
UNDER SEVERE OCCLUSION
Dan Mikami, Kazuhiro Otsuka, Shiro Kumano and Junji Yamato
NTT Communication Science Laboratories, NTT, 3-1 Morinosato-Wakamiya, Atsugi, Kanagawa, 243-0198, Japan
Keywords:
Pose Tracking, Face Pose, Memory-based Prediction, Memory Acquisition.
Abstract:
A novel enhancement for the memory-based particle filter is proposed for visual pose tracking under severe oc-
clusions. The enhancement is the addition of a detection-based memory acquisition mechanism. The memory-
based particle filter, M-PF, is a particle filter that predicts prior distributions from past history of target state,
which achieved high robustness against complex dynamics of a tracking target. Such high performance re-
quires sufficient history stored in memory. Conventionally, M-PF conducts online memory acquisition which
assumes simple target’s dynamics without occlusions for guaranteeing high quality histories. The requirement
of memory acquisition narrows the coverage of M-PF in practice. In this paper, we propose a new memory
acquisition mechanism for M-PF. The key idea is to use a target detector that can produce additional prior
distribution of the target state. We call it M-PFDMA for M-PF with detection-based memory acquisition. The
detection-based prior distribution well predicts possible target position/pose even in limited visibility condi-
tions caused by occlusions. Such better prior distributions contribute to stable estimation of target state, which
is then added to memorized data. As a result, M-PFDMA can start with no memory entries but soon achieve
stable tracking even under severe occlusions. Experiments confirm M-PFDMA’s good performance in such
conditions.
1 INTRODUCTION
Visual object tracking has been acknowledged as one
of the most important techniques in computer vision
(Comaniciu et al., 2003), and is required for a wide
range of applications such as automatic surveillance,
man-machine interfaces (Bradski, 1998; Tua et al.,
2007), and communication scene analysis (Otsuka
et al., 2008).
For visual object tracking, Bayesian filter-based
trackers have been acknowledged as a promising ap-
proach; they represent a unified probabilistic frame-
work for sequentially estimating the target state from
an observed data stream (Gordon et al., 1993). At
each time step, the Bayesian filter computes the pos-
terior distribution of the target state by using observa-
tion likelihood and the prior distribution. One imple-
mentation, the particle filter (Isard and Blake, 1998),
has been widely used for target tracking. It represents
probability distributions of the target state by a set of
samples, called particles. Particle filter, in short PF,
can potentially handle non-Gaussian, nonlinear dy-
namics/observation processes; this contributes to ro-
bust tracking. However, most particle filter-based vi-
sual trackers are rather constrained since they employ
linear, Gaussian, and time invariant dynamics for sim-
plicity.
Mikami et al. focused on the issue of sim-
plicity degrading PF robustness in real-world situ-
ations including abrupt movements and occlusions.
To deal with the target’s non-Markov, non-Gaussian,
and time-varying dynamics, they proposed a memory-
based particle filter, called M-PF, as an extension of
the particle filter (Mikami et al., 2009). M-PF eases
the Markov assumption of PF and uses past history
of the target’s states to predict the prior distribution
on the basis of the target’s long-term dynamics. M-
PF offers robustness against abrupt object movements
and quick recovery from tracking failure. However,
such high performance can be achieved only if tar-
get history in memory is voluminous and high quality.
The first implementation of M-PF in (Mikami et al.,
2009) includes an online memory acquisition period
which requires the capture of simple dynamics with-
out occlusions for assuring stable tracking. Demand-
ing memory acquisition in this manner narrows the
208
Mikami D., Otsuka K., Kumano S. and Yamato J..
ENHANCING MEMORY-BASED PARTICLE FILTER WITH DETECTION-BASED MEMORY ACQUISITION FOR ROBUSTNESS UNDER SEVERE
OCCLUSION.
DOI: 10.5220/0003808302080215
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 208-215
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

coverage of M-PF.
To acquire memory more stably in a wider range
of real-world situations, this paper proposes a new
memory-acquisition mechanism for the M-PF-based
tracker. The key idea is combining M-PF with a target
detector. The target detector can find the target posi-
tion/pose even in cluttered conditions, and the detec-
tion result is used for creating an additional prior dis-
tribution of target position/pose. This detection-based
prior distributionand the original memory-based prior
distribution are combined and provided to the poste-
rior distribution estimation step. Such combined prior
distribution prediction contributes to more stable es-
timation of the target state even in limited visibility
conditions. This estimated target state is then added
to memory,and is used for creating the memory-based
prior distribution in future steps. This cycle of detec-
tion, combined prior distribution prediction, posterior
distribution estimation, and memory accumulation is
highly synergistic in terms of boosting M-PF perfor-
mance in real-world environments. We name it M-
PFDMA for M-PF with detection-based memory ac-
quisition. M-PFDMA has the following advantages;
stable initial tracking without memory, quick recov-
ery after occlusion, and wider pose range recoverabil-
ity.
To verify the effectiveness of M-PFDMA, we im-
plement a facial pose tracker. Facial pose tracking
should yield attributes of the face such as position and
rotation. As the object detector, we use the “joint
probabilistic increment sign correlation face detec-
tor,” in short JPrISC face detector, the multi-view face
detector proposed by Tian et al. (Tian et al., 2010).
The JPrISC face detector can detect faces from frontal
view to near profile view, and can output ten face pose
classes. Facial pose tracking experiments verify that
M-PFDMA can acquire target’s state history even un-
der severe occlusion and achieves accurate tracking
and high recoverability.
In the context of human pose tracking, the idea
of tracking-by-detection has been gaining attention
in recent years as a possible alternative to the tra-
ditional target tracking approach (Murphy-Chutorian
and Trivedi, 2008; Ozuysal et al., 2006; Andriluka
et al., 2010); it reflects the rapid progress in ob-
ject detectors. However, the current human facial
pose detectors are inadequate for realizing mature
tracking-by-detection since they are not fast enough
for real-time tracking, not accurate enough for de-
termining precise target position/pose, and not able
to well handle target dynamics. Rather than re-
lying on just the detector, combining the detector
with a tracker has been seen as a reasonable solu-
tion. One example was proposed by (Kobayashi et al.,
2006), (Ba and Odobez, 2008). They combined a
PF-based tracker with a face detector for observa-
tion (Kobayashi et al., 2006) and prior distribution
prediction (Ba and Odobez, 2008). In (Kobayashi
et al., 2006), a multi-pose class face detector provides
multiple choices with regard to the observation func-
tion but the tracking pose resolution is limited to de-
tectable pose classes. In (Ba and Odobez, 2008), a
head position detector yields a uniform prior distribu-
tion over all pose ranges, which limits pose accuracy
in tracking. Their usage of detectors improved PF-
based tracking, but they targeted only a simple en-
vironment with no occlusions. On the contrary, our
target is more practical and so occlusions are consid-
ered. M-PFDMA aims at high recoverability from
occlusions. The main feature of M-PFDMA is inte-
grating the object detector into the M-PF framework;
the object detector contributes to fast and stable ac-
quisition of target state memory. Eventually, the im-
proved memory contents leads to fast and reliable re-
covery from occlusions. The synergetic effects of M-
PFDMA separate it from previous combination meth-
ods.
The remainder of this paper is organized as fol-
lows; Sect. 2 briefly reviews memory-based particle
filter and its recoverability from tracking failure. Sec-
tion 3 proposes our new facial pose tracker. Section 4
details the experimental environment and results. Fi-
nally, Sect. 5 concludes and discusses our proposal.
2 MEMORY-BASED PARTICLE
FILTER AND ITS TRACKING
RECOVERABILITY
This section overviews the memory-based particle fil-
ter and addresses the recovery problem from tracking
failure, which has, up to now, been an unsolved prob-
lem in the field of tracking.
2.1 Memory-based Particle Filter
M-PF (Mikami et al., 2009) realizes robust target
tracking without explicit modeling of the target’s dy-
namics even when the target moves quickly. Figure
1 outlines M-PF. M-PF keeps the temporal sequence
of past state estimates
b
x
x
x
1:T
= {
b
x
x
x
1
, ···
b
x
x
x
T
} in mem-
ory. Here,
b
x
x
x
1:T
denotes a sequence of state estimates
from time 1 to time T, and
b
x
x
x
t
denotes a pose estimate
at time t. M-PF assumes that the subsequent parts
of past similar states provide good estimates of the
current future. M-PF introduced Temporal Recurrent
Probability (TRP), which is a probability distribution
ENHANCING MEMORY-BASED PARTICLE FILTER WITH DETECTION-BASED MEMORY ACQUISITION FOR
ROBUSTNESS UNDER SEVERE OCCLUSION
209
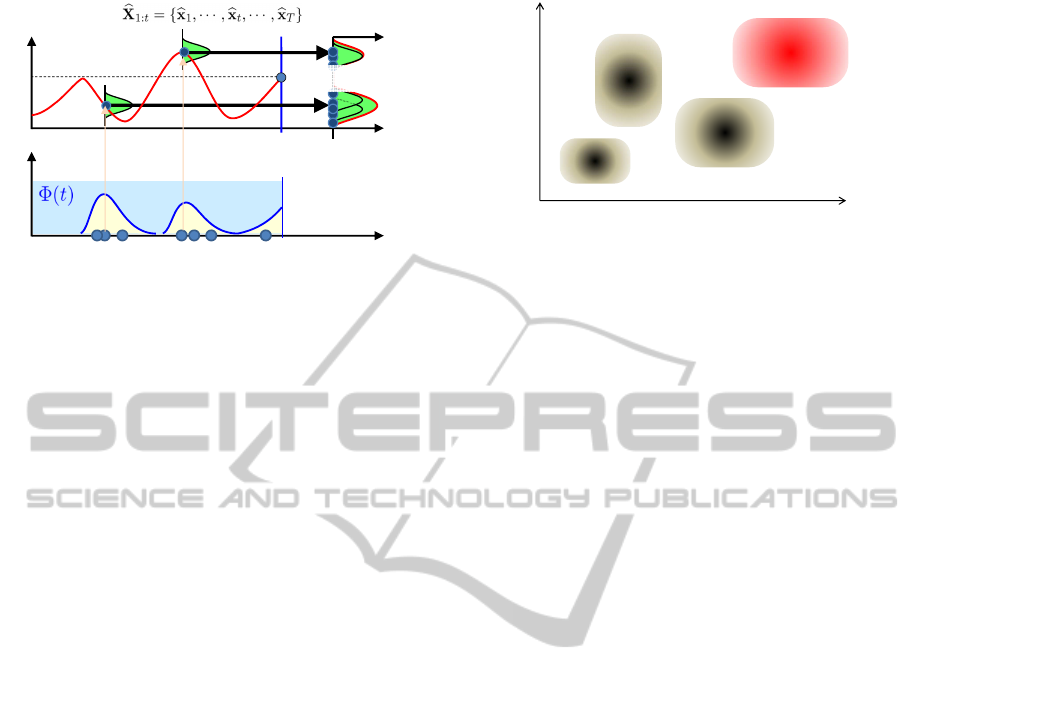
Prior dist.
Pose space
TRP
tT
∆
+
2. Temporal sampling
Now
T
Pose history
1. Modeling TRP [Temporal
Recurrent Probability]
3. Sampling states
Figure 1: M-PF employs past state sequences to predict a
future state. First, it calculates the reoccurrence possibility
of past state estimates (TRP). Past time steps are then sam-
pled on the basis of TRP. Past state estimates corresponding
to the sampled time steps are combined to predict prior dis-
tribution. M-PF enables the implicit modeling of complex
dynamics.
defined in the temporal domain that indicates the pos-
sibility that a past state will reappear in the future. To
predict the prior distribution, M-PF starts with TRP
modeling. It then conducts temporal sampling on the
basis of TRP. The sampled histories are denoted by
blue dots in Fig. 1. It retrieves the corresponding past
state estimates for each sampled time step, denoted by
pink dots in Fig.1. After that, considering the uncer-
tainty in the state estimates, each referred past state is
convoluted with kernel distributions (light green dist.
in Fig.1), and they are mixed together to generate the
prior distribution (green dist. in Fig. 1). Finally, a
set of particles is generated according to the prior dis-
tribution (blue dots in right part of Fig. 1). The M-
PF-based face pose tracker in (Mikami et al., 2009)
estimates the position and rotation at each time step.
M-PF uses the same observation process as traditional
PF, which uses a single template built at initialization.
This yields the 50 degree face rotation limit noted in
(Mikami et al., 2009).
2.2 Recovery from Tracking Failure
The conventional visual trackers track a target with
the assumptions of simple dynamics and excellent
visibility. Severe occlusions remained a challenging
problem, i.e. how can a tracker rediscover the lost tar-
get under severe occlusion. This occlusion recovery
problem can be viewed from two aspects; quickness
of recovery and recoverable pose range.
The quickness of recovery indicates how rapidly
a tracker can rediscover a target after the target reap-
pears after being lost due to occlusion. The recover-
able pose range indicates the pose range within which
the tracker can rediscoverthe face, we must expect the
Recoverable pose range
wide
Quickness of recovery
fast
PF
PF
+
Dete
ctor
M-PF
M-PFDMA
(Proposed)
Figure 2: Properties of facial pose tracker with regard to
recovery speed and recoverable pose range; PF is only
able to rediscover the target if it takes a pose similar to
the pose prior to tracking loss. By integrating a detector,
PF+Detector enables recovery if the target can be detected.
M-PF enables recovery if the target takes a stored pose. M-
PF-based recovery can find the target faster than the detec-
tor. M-PFDMA supports memory-based quick recovery and
detection-based wide pose range recovery.
target pose to change significant during an occlusion.
Conventional methods can be mapped as in Fig. 2 ac-
cording to these aspects.
The conventional PF-based tracker tries to redis-
cover a lost target by simply broadening prior distri-
bution frame by frame according to random walk dy-
namics. It may be able to rediscovera lost target if the
occlusion period is short and pose changes is small.
However, as time passes and a pose changes signifi-
cantly, rediscovery probability falls dramatically.
Original M-PF (with simple online memory ac-
quisition) can rediscover the lost target if the target
takes a pose that is stored in memory by memory-
based prior distribution prediction. Such memory-
based rediscovery is faster than detection-based re-
discovery or PF-based rediscovery. This is because
memory-based prior distribution can well predict pos-
sible poses/positions of the target after occlusion.
Therefore, M-PF provides more rapid recovery and
wider recoverable pose range.
Combinationsof particle filtering and detector, de-
noted by PF+Detector in Fig.2, are able to rediscover
the lost target if the target takes detectable poses.
Though the detectable poses and the required time for
detection depend on the detector’s performance, gen-
erally speaking, detectors have much higher computa-
tional costs than trackers. To detect targets that take a
greater variety of poses, computational costs become
even higher. This also means that the recovery speed
tends to be rather slow.
M-PFDMA aims at achieving faster recovery
in wide pose ranges by integrating detection-based
memory acquisition into the memory-based particle
filter. Detection-based prior distribution helps re-
discovery of targets that take previously unobserved
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
210

poses. Rediscovered and tracked positions/poses are
stored in history. Acquired history can be used
to improve memory-based prior distribution predic-
tion. This synergetic combination of detection-based
memory acquisition and memory-based prior distri-
bution prediction enables faster recovery in wide pose
ranges.
3 MEMORY-BASED PARTICLE
FILTER WITH
DETECTION-BASED MEMORY
ACQUISITION: M-PFDMA
This section proposes an enhancement of M-PF for
object tracking called M-PFDMA. It stands for M-PF
with detection-based memory acquisition. It achieves
quick recovery in wide pose range due to its synergis-
tic combination of an object detector and tracker.
As reviewed in Sect. 2.1, the basic assumption of
M-PF was that the target repeats similar movements
again and again. On the basis of this assumption,
M-PF introduced the temporal recurrent probability
(TRP), which indicated the tendency of past simi-
lar states reappearing in the future. M-PF replaced
the simple dynamics model employed in conventional
particle filters, such as the random walk model, by
the temporal recurrent probability, for predicting prior
distribution, called memory-based prior distribution.
M-PFDMA yields detection-based prior distribution
in addition to the memory-based prior distribution.
The detection-based prior distribution is folded into
memory-based prior distribution. This integration of
an effective detector into a unified M-PF framework
is the key contribution of M-PFDMA.
The remainder of this section first overviews M-
PFDMA, and then, describes the prior distribution
prediction formulation. Finally, we describe its im-
plementation in a facial pose tracker.
3.1 System Overview
M-PFDMA integrates an object detector into the M-
PF framework. Figure 3 illustrates the block dia-
gram of M-PFDMA; the differences from M-PF are
hatched. M-PFDMA has four main components; ini-
tialization, prior distribution prediction, posterior dis-
tribution prediction, and tracking result estimation. In
the initialization step, the tracker detects a target and
makes a target model. In the prior distribution calcu-
lation step, it calculates prior distribution on the basis
of two clues. One is memory-based prior distribu-
tion prediction, which is described in Sect. 2.1. The
Camera
Initialization
Object
detection
Detection-based
Prior dist. prediction
Memory-based prior
dist. prediction
Combined
prior
estimation
Posterior dist.
estimation
Tracking result
estimation
Past history
of tracking
results
Prior distribution prediction
Figure 3: Block diagram of our facial pose tracker. It has
four main components; initialization, prior distribution pre-
diction, posterior distribution prediction, and tracking result
estimation. The key differences of M-PFDMA from M-PF
are hatched, i.e. integration of detection-based prior distri-
bution prediction into memory-based prior distribution pre-
diction. It enables rediscovery of a lost target even if the
target takes a position/pose which has not been stored in
memory while occlusions. As the more position/pose are
added into the memory, the better the memory-based prior
distribution prediction becomes. The synergetic effect be-
tween detection and tracking is the key contribution of the
proposed M-PFDMA.
other is detection-based prior distribution estimation;
detection-based probability distribution is generated
on the basis of the detection results. The memory-
based and detection-based prior distributions are then
combined, which is described in Sect. 3.2 in more de-
tail. The posterior distribution calculation step calcu-
lates observation likelihood, and then, by using likeli-
hood and prior distribution, calculates posterior dis-
tribution. Finally, a pose estimate is obtained by
weighted averaging and stored in memory. The steps
from determining the prior distribution to pose esti-
mation are repeated in each frame.
3.2 Formulation of Prior Distribution
Prediction of M-PFDMA
M-PFDMA’s key extension from M-PF resides in its
prior distribution prediction parts. Unlike M-PF, M-
PFDMA employs an object detector and combines
memory-based prior distribution and detection-based
prior distribution. This section formulates the prior
distribution of M-PFDMA.
Bayesian filters, including particle filter, calculate
prior distribution by multiplying the observation like-
lihood by the motion dynamics of target state as in
p(x
x
x
t+1
|Z
Z
Z
1:t
) =
Z
p(x
x
x
t+1
|x
x
x
1:t
) · p(x
x
x
1:t
|Z
Z
Z
1:t
)dx
x
x
1:t
, (1)
where x
x
x
t
denotes the state vector indicating position
and rotation, x
x
x
1:t
= {x
x
x
1
, ··· , x
x
x
t
} denotes the state se-
quence of state vector from time 1 to t, and Z
Z
Z
1:t
=
ENHANCING MEMORY-BASED PARTICLE FILTER WITH DETECTION-BASED MEMORY ACQUISITION FOR
ROBUSTNESS UNDER SEVERE OCCLUSION
211

{Z
Z
Z
1
, ··· , Z
Z
Z
t
} denotes the sequence of observations
from time 1 to t.
As the dynamics model, conventional particle fil-
ters assume a short term Markov model as in
p(x
x
x
t+1
|x
x
x
1:t
) ≈ p(x
x
x
t+1
|x
x
x
t
). (2)
The memory-based particle filter assumes the ten-
dency of repeating past positions/poses, and intro-
duced the temporal recurrent probability Φ(·). It re-
placed the dynamics model with the temporal recur-
rent probability given by
p(x
x
x
t+∆t
|x
x
x
1:t
, ∆t) =
t
∑
τ=1
Φ(t|
b
x
x
x
1:t
, ∆τ) · K(x
x
x
t+∆τ
|
b
x
x
x
τ
),
where ∆t denotes the time offset between current time
and prediction target and
b
x
x
x denotes a point estimate
stored in memory. K() is the kernel distribution that
represents uncertainty in the stored state estimate.
M-PFDMA replaces the memory-based prior dis-
tribution by a combination of memory-based prior
distribution and detection-based prior distribution cal-
culated based on object detection results
e
x
x
x
j
(z
t
) as
p(x
x
x
t+∆t
|x
x
x
1:t
, ∆t, z
t+∆t
) = α
N
d
∑
j=1
q(x
x
x
t
|
e
x
x
x
j
(z
t
))
+(1− α)
t
∑
τ=1
Φ(t|
b
x
x
x
1:t
, ∆τ) · K(x
x
x
t+∆τ
|
b
x
x
x
τ
), (3)
where α denotes the mixing weight between memory-
based prior distribution (first part of (4)) and
detection-based prior distribution q() (latter part of
(4)), and N
d
denotes the number of detected objects.
The detection result ex
j
(z
t
) includes estimated position
and pose, and q(x|
e
x
x
x
j
(z
t
)) denotes Gaussian distribu-
tions with mean for each position/pose. In this paper,
a static predefined value α = 0.15, which is indepen-
dent of the number of detected objects, is employed
for the mixing weight α.
The combined prior distribution realizes high re-
coverability and accuracy, which yields quick and sta-
ble memory acquisition.
3.3 Implementation in a Facial Pose
Tracker
We implement a facial pose tracker on the basis of
M-PFDMA. As the detection method, the multi-view
face detector proposed by Tian et al. (Tian et al.,
2010), called a JPrISC face detector, is employed
1
.
The multi-view face detector is able to detect faces
1
Though we used the JPrISC as the face pose detector,
it is not specialized in face pose. By collecting training im-
ages, it can be applied for detecting other objects.
and to output ten pose classes including frontal view
and near profile view. It achieved relatively fast detec-
tion without degrading detection accuracy by using a
calculation sequence determined by entropy.
4 EXPERIMENT
To confirm M-PFDMA’s performance, we focus on
severe occlusion cases because stable tracking is al-
ready possible with conventionalmethods if the target
is not occluded, even if it exhibits complex dynamics.
4.1 Experimental Settings
Video capturing environment is as follows. We used
PointGreyResearch’s FLEA, a digital color camera, to
capture 1024 x 768 (pixels) images at 30 frames per
second. Note that the tracking processes uses only
grayscale images converted from the color images.
The CPU of the PC used was an Intel Core2Extreme
3.0GHz (Quad Core) and the GPU was NVIDIA
GeForce GTX480. All experiments used 2000 par-
ticles.
Our tracker was implemented on the basis of STC-
Tracker (Lozano and Otsuka, 2008), which acceler-
ates particle filtering by GPU implementation. It can
run at 30 fps, and our M-PFDMA-based tracker also
can run at 30 fps.
4.2 Typical Example of Proposed Facial
Pose Tracker in Action
We compare M-PFDMA to three other methods.
First one is the memory-based particle filter (M-PF)
(Mikami et al., 2009), the second one is a combination
of particle filtering and face detector called the JPrISC
face detector (PF+Detector). Note that the JPrISC
face detector can output ten pose classes in addition to
position. Therefore, PF+Detector is expected to show
higher performance than similar method in (Ba and
Odobez, 2008) especially in terms of speed of recov-
ery. And the third one is FaceAPI (Seeingmachines,
), which is known as the best face tracker that is com-
mercially available. The FaceAPI can detect a face
in near frontal view, and then can sequencially esti-
mate position and pose of the face. Note that because
FaceAPI is a commercial facial pose tracker, the de-
tailed algorithm is not apparent.
We prepared two videos with severe occlusions.
In the first video, objects horizontally and vertically
cross at the camera’s centerline as in Fig.8, and cause
occlusions. Tracking starts in the top-right area,
and the subject moves up-down and left-right while
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
212

time
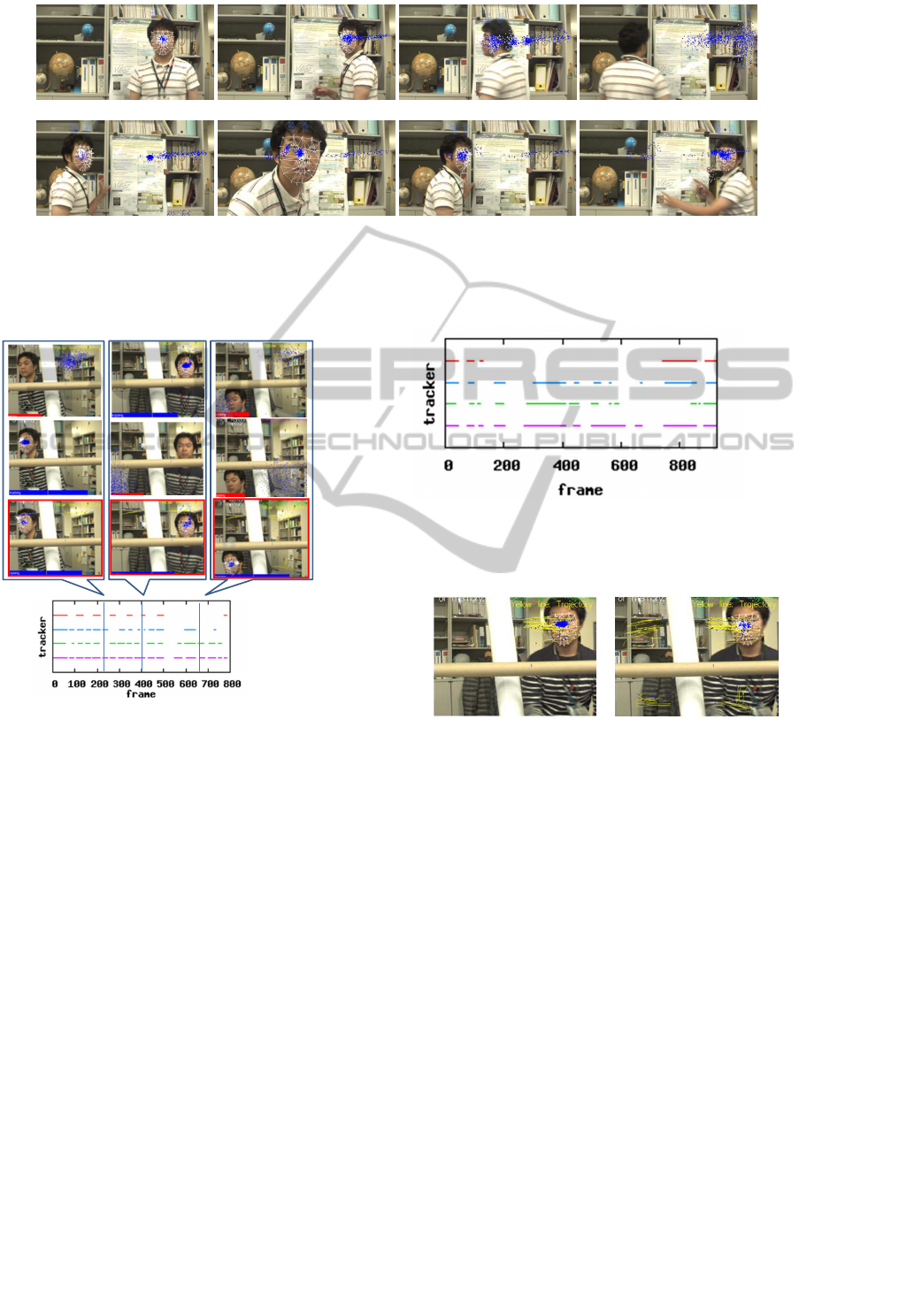
M-PF PF+Detection M-PFDMA
Figure 4: Tracking results of M-PF, PF+Detector, and M-PFDMA (proposed). White mesh denotes estimated posi-
tion/pose. While tracking is unstable, the mesh turns gray. The left column shows M-PF’s output, the middle column shows
PF+Detector’s output, and the right column shows M-PFDMA’s output. In each column, figures are listed in time order.
changing his pose. The second video simulates video
conference situation; the subject makes a presentation
in front of a camera, interacting with participants on
the other side.
Figure 4 shows snapshots of the tracking behavior
of M-PF, PF+Detector, and M-PFDMA, from the first
video. Only upper half images are shown. In Fig. 4,
left column, middle column, and right column show
the result of M-PF, PF+Detector, and M-PFDMA, re-
spectively. In each column, figures are listed in time
order. From first row to second row, the target face
moved from right to left; and from second row to
third row, it moved from left to right. Second row
shows that M-PFDMA and PF+Detector successfully
detected the target face while M-PF didn’t, because
the target’s pose had not been stored. It is one exam-
ple of improvement in recoverable pose range. This
recovery confirms the effectiveness of the detector.
However, these recoveries were achieved by the de-
tector, so they took rather a long time. Third row
shows that M-PF and M-PFDMA found the lost tar-
get, while PF+Detector took much longer to redis-
cover it. In this situation, past state history of right
side had already been stored, so the memory-based
methods quickly rediscovered the lost target.
FaceAPI is able to detect a face in near frontal
view, so it successfully rediscovered the tracking tar-
get after occlusions if the target was near frontal view
and was observed without blur. While a target is mov-
ing, the observed image becomes blurred. Therefore,
FaceAPI failed to rediscovered the lost target while it
was moving even if it had not been occluded. On the
contrary, M-PFDMA quickly rediscover the lost tar-
get under blurred observation. Thus, M-PFDMA out-
performed other trackers including PF-based trackers
and a commercial non-PF-based tracker.
Figure 5 shows snapshots of the tracking behav-
ior of M-PFDMA from the second video. The snap-
shots are listed in time order. The second video in-
cludes self-occlusion, e.g., turning back while moving
left to right (Fig.5(b)-(e)) and right to left (Fig. 5(g)-
(h)). It also includes scale changes (Fig.5(e)-(f)) and
non-rigid deformations (Fig.5(g)), e.g., facial expres-
sion changes. During natural behaviors as depicted in
Fig.5, our M-PFDMA successfully estimates the po-
sition and rotation of the target while the target is not
occluded.
The above comparisons verified that M-PFDMA
supports both memory-based quick recovery and
detection-based recovery and so covers the cases in
which the target deviates from stored poses.
4.3 Quantitative Evaluations
For quantitative evaluations, the same videos were
used. First, tracking success ratio was examined.
The tracking success ratio is the ratio of frames in
which the tracker estimated pose and position cor-
rectly as confirmed by manual observation. The video
includes numerous occlusions. Therefore, recovery
performance, i.e. speed of recovery and recoverable
pose range directly impacts the tracking success ra-
tio. Comparison targets are M-PF, PF+Detector, and
FaceAPI.
ENHANCING MEMORY-BASED PARTICLE FILTER WITH DETECTION-BASED MEMORY ACQUISITION FOR
ROBUSTNESS UNDER SEVERE OCCLUSION
213
(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 5: Tracking results for M-PFDMA (proposed). White mesh denotes estimated position/pose. While tracking is unsta-
ble, the mesh turns gray. (a) Initialization. (b)-(e) The subject moves from right to left while rotating; (e)-(g) the subject gets
close to and backs away it; (g)-(h) the subject moves from left to right while rotating. During such natural behavior of the
subject, the proposed M-PFDMA occasionally missed the target. However, it rediscovered the target soon after occlusions.
M-PF
PF+Detector
M-PFDMA
(Proposed)
FaceAPI
M-PF
PF+Detector
M-PFDMA
(Proposed)
Figure 6: Tracking results of M-PF, PF+Detector, FaceAPI,
and M-PFDMA are shown. M-PFDMA achieved faster
recovery of lost target than the others. In frame 225,
PF+Detector and M-PFDMA successfully estimated the po-
sition/pose of the target, whereas M-PF didn’t because his-
tory wasn’t stored close to the position/pose (left column).
In frame 400, M-PF and M-PFDMA successfully estimated
the position/pose of the target, but PF+Detector didn’t be-
cause detection requires large computation time (middle
column). In frame 655, only M-PFDMA successfully es-
timated the position/pose of the target (right column).
The results, shown in Table 1, confirm that M-
PFDMA successfully estimated the target’s position
and rotation in 81.5%/ 90.1% (video1/video2) of
frames, whereas M-PF, PF+Detector, and FaceAPI
achieved only 37.5%/ 36.9%, 52.4%/ 62.2%, and
64.2%/ 53.7%, respectively. Figure 6 shows a part
of the tracking results for video1 in more detail.
In Fig. 6, the horizontal axis denotes frame number.
Each line denotes a tracking result. The discontinu-
M-PF
PF+Detector
M-PFDMA
(Proposed)
FaceAPI
Figure 7: Tracking results of M-PF, PF+Detector, FaceAPI,
and M-PFDMA are shown. M-PFDMA achieved faster re-
covery of lost target than the others. Compared with Fig. 6,
a similar property is observed.
(a) M-PF (b) M-PFDMA (proposed)
Figure 8: Stored history by each method; (a) M-PF and (b)
M-PFDMA (proposed method). Positions of stored history
are shown by yellow lines. M-PF obtained history only in
right-top area, where the target face was initialized. Con-
trary, M-PFDMA obtained hitory in wider area.
ities indicate the frames in which target position/pose
were not correctly estimated. Figure 7 shows track-
ing results for video2. As shown in Figs. 6 and 7,
M-PFDMA combined the frames correctly estimated
by PF+Detector and M-PF while avoiding their defi-
ciencies.
Next, the memory acquisition results of the previ-
ous M-PF and the proposed M-PFDMA from video 1
are shown in Fig.8. Yellow lines denote the posi-
tion of the history stored in memory. So, target’s
movements along the yellow lines are supposed to
be tracked stably on the basis of memory-based prior
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
214
Table 1: Comparisons of tracking successful ratio among
M-PF, PF+Detector, FaceAPI, and M-PFDMA (proposed).
When we calculated the tracking successful ratio, the
frames which were not able to track due to occlusion were
excluded.
successful tracking ratio
Method video 1 video2
M-PF 37.5% 36.9%
PF+Detector 52.4% 62.2%
FaceAPI 64.2% 53.7%
M-PFDMA (proposed) 81.5% 90.1%
distribution prediction. The left figure shows the
output of M-PF, and the right figure shows that of
M-PFDMA. As shown in Fig.8, M-PF stored his-
tory covered only the top-right area, where tracking
started. This means that the tracker failed to redis-
cover target when the target moved to other areas af-
ter occlusions due to large changes in position/pose
while occlusions. On the contrary, the stored memory
of M-PFDMA covered the entire field of view. The
numbers of stored memories of this sequence by M-
PF and M-PFAP are 455 and 808, respectively. The
memory acquisition performance of M-PFDMA un-
der severe occlusion was confirmed.
5 CONCLUSIONS
A memory-based particle filter with detection-based
memory acquisition, in short M-PFDMA, was pro-
posed for vision-based object tracking. M-PFDMA
offers robust memory acquisition under severe oc-
clusion since it creates a synergistic combination of
detection-based memory acquisition and the memory-
based approach. M-PFDMA was shown to achieve
high accuracy and quick recovery in real-world sit-
uations. We verified its effectiveness in facial pose
tracking experiments.
Future works include memory management. M-
PFDMA stores the correctly estimated target state
in memory. The correctness is automatically judged
by using the maximum likelihood among particles.
Though it works well in most cases, the quality of
stored data is very important for memory-based prior
distribution prediction. Therefore, we will consider
more precise ways of judging tracking correctness.
Future works also include automatic determination of
the mixing weight α of detection-based and memory-
based prior distribution. Results on this paper em-
ployed static α. However, the ideal α varies by condi-
tions such as current tracking stability. We would like
to reveal factors affecting α, and then, would like to
tackle automatic setting of α according to the factors.
REFERENCES
Andriluka, M., Roth, S., and Schiele, B. (2010). Monocu-
lar 3D pose estimation and tracking by detection. In
CVPR 2010, pages 623–630.
Ba, S. and Odobez, J.-M. (2008). Probabilistic head pose
tracking evaluation in single and multiple camera.
Multimodal Technologies for Perception of Humans,
4625/2008:276–286.
Bradski, G. R. (1998). Computer vision face tracking for
use in a perceptual user interface. In Proc. IEEE Work-
shop Applications of Computer Vision, pages 214–
219.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based object tracking. IEEE Trans. PAMI, 25:564–
577.
Gordon, N., Salmond, D., and Smith, A. F. M.
(1993). Novel approach to non-linear and
non-gaussian bayesian state estimeation. lEE
Proc.F:Communications Rader and Signal Process-
ing, 140(2):107–113.
Isard, M. and Blake, A. (1998). Condensation - condi-
tional density propagation for visual tracking. IJCV,
29(1):5–28.
Kobayashi, Y., Sugimura, D., Sato, Y., Hirasawa, K.,
Suzuki, N., Kage, H., and Sugimoto, A. (2006). 3D
head tracking using the particle filter with cascaded
classifiers. In BMVC.
Lozano, O. M. and Otsuka, K. (2008). Real-time visual
tracker by stream processing. Journal of VLSI Signal
Processing Systems.
Mikami, D., Otsuka, K., and Yamato, J. (2009). Memory-
based particle filter for face pose tracking robust under
complex dynamics. In Proc. CVPR, pages 999–1006.
Murphy-Chutorian, E. and Trivedi, M. M. (2008). Head
pose estimation in computer vision: A survey. IEEE
Trans. PAMI.
Otsuka, K., Araki, S., Ishizuka, K., Fujimoto, M., Hein-
rich, M., and Yamato, J. (2008). A realtime multi-
modal system for analyzing group meeting by com-
bining face pose tracking and speaker diarization. In
Proc. ACM ICMI, pages 257–264.
Ozuysal, M., Lepetit, V., Fleuret, F., and Fua, P. (2006).
Feature harvesting for tracking-by-detection. In LNCS
3953(ECCV2006), pages 592–605.
Seeingmachines. FaceAPI. http://
www.seeingmachines.com/product/faceapi/.
Tian, L., Ando, S., Suzuki, A., and Koike, H. (2010). A
probabilistic approach for fast and robust multi-view
face detection using compact local patterns. In Proc.
the IIEEJ Image Electronics and Visual Computing
Workshop.
Tua, J., Taob, H., and Huang, T. (2007). Face as mouse
through visual face tracking. CVIU, 108(1-2):35–40.
ENHANCING MEMORY-BASED PARTICLE FILTER WITH DETECTION-BASED MEMORY ACQUISITION FOR
ROBUSTNESS UNDER SEVERE OCCLUSION
215
