
PEOPLE DETECTION AND RE-IDENTIFICATION
FOR MULTI SURVEILLANCE CAMERAS
Etienne Corvee, Slawomir Bak and Franc¸ois Br´emond
Pulsar Team, INRIA, Sophia Antipolis, France
Keywords:
People Detection, People Tracking, People Re-identification, Local Binary Pattern, Mean Riemannian
Covariance.
Abstract:
Re-identifying people in a network of non overlapping cameras requires people to be accurately detected and
tracked in order to build a strong visual signature of people appearances. Traditional surveillance cameras
do not provide high enough image resolution to iris recognition algorithms. State of the art face recognition
can not be easily applied to surveillance videos as people need to be facing the camera at a close range. The
different lighting environment contained in each camera scene and the strong illumination variability occurring
as people walk throughout a scene induce great variability in their appearance. In addition, people images
occlud each other onto the image plane making people detection difficult to achieve. We propose a novel
simplified Local Binary Pattern features to detect people, head and faces. A Mean Riemannian Covariance
Grid (MRCG) is used to model appearance of tracked people to obtain highly discriminative human signature.
The methods are evaluated and compared with the state of the art algorithms. We have created a new dataset
from a network of 2 cameras showing the usefulness of our system to detect, track and re-identify people using
appearance and face features.
1 INTRODUCTION
Recently, the person re-identification problem be-
came one of the most important tasks in video surveil-
lance. Only knowledge about identities of tracked
persons can allow a system to fully extract seman-
tic information about scene activities. The human re-
identification problem can be defined as a determi-
nation whether a given person of interest has already
been observed over a network of cameras.
Haar features have been studied intensely for the
detection of objects, in particular for face detection
(Viola and Jones, 2004). One another major fea-
ture used for object detection is provided by HOG
as evaluated in (Dollar et al., 2009). Pedestrians,
faces and bicycles are successfully detected when rep-
resented by HOG (Dalal and Triggs, 2005a; Adam
et al., 2006). A boosting technique is often used to
model and rapidly detect objects (Laptev, 2006) such
as humans (Zhu et al., 2006). SVM coupled with
HOG is also often used (Dalal and Triggs, 2005a) for
this task. Although Covariance features can be com-
putationally expensive to estimate, they have strong
discriminative powers. Tuzel and al. (Tuzel et al.,
2008) use a Logiboost algorithm on Riemannian man-
ifolds where Covariance features in a Riemannian
geometry are trained allowing the classification of
pedestrians.
Many recent papers use body parts to enhance
people detection performance. There are many ways
to combine body parts; for instance Mohan et al. (Mo-
han et al., 2001) studied different voting combination
of body parts classifiers. In (Mikolajczyk et al., 2004),
Mikolajczyk et al. use 7 body part detectors inde-
pendently trained to better detect humans using SIFT-
like descriptors. Hussein and Porikli (Hussein et al.,
2009) introduce the notion of deformable features in
a Logiboost algorithm to allow body parts to have non
fixed locations in a people image template. More re-
cently, high performances were obtained by (Huang
and Nevatia, 2010) using a highly trained set of gran-
ules.
There is a natural consequence of an inven-
tion of robust human detection algorithms to ex-
tend approaches for re-identification purposes. The
appearance-based re-identification techniques were
focused on associating pairs of images, each con-
taining one instance of individual. These methods
are named single-shot approaches (Bak et al., 2010b;
Park et al., 2006; Wang et al., 2007) and until now
82
Corvee E., Bak S. and Brémond F..
PEOPLE DETECTION AND RE-IDENTIFICATION FOR MULTI SURVEILLANCE CAMERAS.
DOI: 10.5220/0003808600820088
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 82-88
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
they were the most popular techniques. Currently re-
searches try to improve identification accuracy by in-
tegrating information over many images. The group
of methods which employs multiple images of the
same person as training data is called multiple-shot
approaches.
As to single-shot approaches, in (Park et al.,
2006) the clothing colour histograms taken over the
head, shirt and pants regions together with the ap-
proximated height of the person were used as the
discriminative feature. Similarly, clothing segmen-
tation together with facial features (Gallagher and
Chen, 2008) were employed to re-identify individu-
als. Shape and appearance context model is proposed
in (Wang et al., 2007). A pedestrian image is seg-
mented into regions and their colour spatial informa-
tion is registered into a co-occurrence matrix. This
method works well if the system considers only a
frontal viewpoint. For more challenging cases, where
viewpoint invariance is necessary, the ensemble of lo-
calized features (ELF) (Gray and Tao, 2008) has been
proposed. Instead of designing a specific feature for
characterizing people appearance, a machine learning
algorithm constructs a model that provides maximum
discriminability by filtering a set of simple features.
Enhancement of discriminative power of each indi-
vidual signature with respect to the others was also
the main issue in (Lin and Davis, 2008). Pairwise
dissimilarity profiles between individuals have been
learned and adapted into nearest neighbour classifica-
tion. Similarly, in (Schwartz and Davis, 2009), a rich
set of feature descriptors based on colour, textures and
edges has been used to reduce the amount of ambigu-
ity among human class. The high-dimensional signa-
ture was transformed into a low-dimensional discrim-
inant latent space using a statistical tool called Par-
tial Least Squares (PLS) in one-against-all scheme.
Nevertheless in both methods, an extensive learning
phase based on the pedestrians to re-identify is neces-
sary to extract discriminative profiles what makes the
approaches non-scalable. The person re-identification
problem has been reformulated as a ranking problem
in (Prosser et al., 2010). The authors presented exten-
sive evaluation of learning approaches and show that
a ranking relevance based model can improve the re-
liability and accuracy.
Concerning multiple-shot approaches, in (Gheis-
sari et al., 2006) the spatiotemporal graph was
generated for ten consecutive frames for grouping
spatiotemporally similar regions. Then, clustering
method is applied to capture the local descriptions
over time and improve matching accuracy. In (Bak
et al., 2010a), the AdaBoost was applied to extract the
most discriminative and invariant Haar-like features.
Here, again one-against-all learning scheme was used
to catch human dissimilarities. In (Farenzena et al.,
2010), the authors proposed to combine three fea-
tures: 1) chromatic content (HSV histogram); 2) max-
imally stable colour regions (MSCR) and 3) recurrent
highly structured patches (RHSP). The extracted fea-
tures were weighted by the distance with respect to
the vertical axis to minimize effects of pose varia-
tions. Recurrent patches were also proposed in (Baz-
zani et al., 2010). Epitome analysis was used to ex-
tract highly informative patches form the set of im-
ages.
2 OVERVIEW
Based on our previously evaluated appearance-based
people re-identification system in (Bak et al., 2011),
we here test our system in a 2 camera network asso-
ciating people, head and face. The first task is to de-
tect people using simplified LBP features in section
3. Tracked objects are extracted from a video using a
temporal trajectory analysis algorithm (Avanzi et al.,
2001) which are fed to the appearance based people
re-identification system in section 4. We propose a
simple face recognition algorithm in section 5. Re-
identification results are given in section 6. A new
database was created to simulate a 2 cameras network
with non overlapping views. This database is referred
to as the TSP database and contains 23 persons walk-
ing back and forth in both cameras as illustrated in
figure 1. Two tracked persons with heads and faces
are shown in camera 1 and 2 of the TSP camera setup
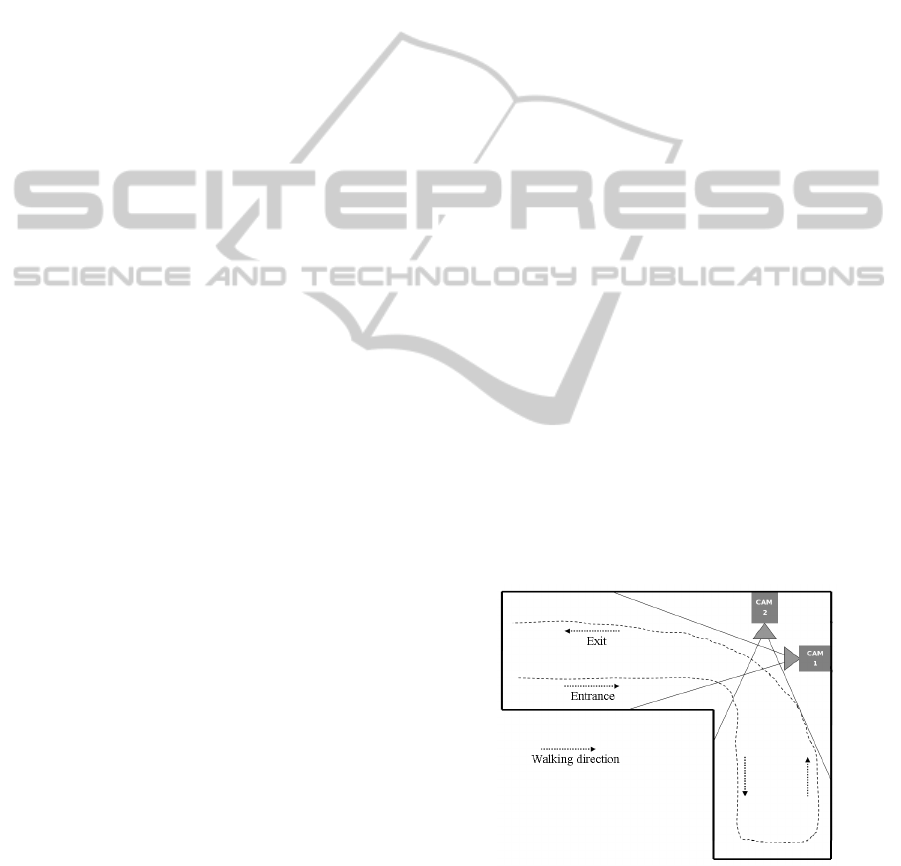
in figure 2.
Figure 1: TSP camera setup: 2 non overlapping cameras in
2 joint corridors.
PEOPLE DETECTION AND RE-IDENTIFICATION FOR MULTI SURVEILLANCE CAMERAS
83

Figure 2: Tracked people, head and faces in up: TSP cam-
era 1 and down: TSP camera 2.
3 PEOPLE DETECTION USING
SIMPLIFIED LOCAL BINARY
PATTERN
The standard LBP operator extract feature vector of
size 256 (Trefny and Matas, 2010). We have imple-
mented a new simplified version of the LBP operator
by reducing its dimensionality to 16. which we will
refer to as the SLBP for the rest of the paper. This
SLBP is calculated from 4 cells as illustrated in im-
age 3. A pixel intensity average v
c,w,h
is calculated
for each of the 4 cells c, c = [1 : 4] as defined in equa-
tion 1 where E represents the expectation (average)
function over pixel locations (x, y).
v
c,w,h
= E
x
′
,y
′
I(x
′
, y
′
)
(1)
c =
1 : x
′
= [x : x + h], y
′
= [y : y + w]
2 : x
′
= [x : x + h], y
′
= [y + w : y+ 2w]
3 : x
′
= [x + h : x+ 2h], y
′
= [y : y + w]
4 : x
′
= [x + h : x+ 2h], y
′
= [y + w : y+ 2w]
The SLBP feature is then calculated from 4 mean
pixel intensity differences ∆v
q
as follows:
SLBP
w,h
(x) =
3
∑
q=0
s(∆v
q
)2
q
, s(.) =
1 if . > V
0 else
∆v
q
= v
i
− v
j
(q, i, j) = {(0, 1, 0), (1, 3, 2), (2, 2, 0), (3, 3, 1)}
An Adaboost training scheme is adopted to train cell
features across the a people image database. The
training is performed on a multiple scale approach by
varying the SLBP cell dimensions:
(w, h) = { (1, 1)(1, 2)..(1, 8), (2, 1)..(8, 8)}
We apply the same training algorithm on head and
face image datasets for head and face detection. The
training for people detection is done using 7K positive
images (5K from NICTA, 1K from MIT and 1K from
INRIA people training dataset) and 50 background
negative PAL images. Head were trained with 1K
positive images (cropped head images from INRIA
and TUD people training dataset) and 10 background
negative images. Faces were trained with the standard
CMU face training database.
The traditional Adaboost technique is used to train
SLBP features. We reach a frame rate of 1fps for
a minimum size of 160 pixels for people height in
PAL images and when the scan is performed with an
increase rate of 10% of its actual scanning window
width and height. Simple rules are applied to the de-
tected candidates in order to fuse overlapping candi-
dates and eliminate stand alone noisy candidates: ob-
jects are merged if they overlap each other with a min-
imum union-over-intersectionratio of 50% and a final
object requires a minimum number of 2 overlapping
ones.
Figure 3: Simplified LBP operator.
4 HUMAN RE-IDENTIFICATION
Recently, the person re-identification problem be-
came one of the most important tasks in video surveil-
lance. There is a natural consequence of an in-
vention of robust human detection algorithms to ex-
tend approaches for recognition purposes. Person re-
identification can be considered on different levels
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
84

Figure 4: Covariances gathered from tracking results are
used to compute the MRC using Riemannian manifold
space (depicted with the surface of the sphere).
depending on information cues which are currently
available in the system. Biometrics such as face, iris
or gait can be used to recognize identities. Never-
theless, in most video surveillance scenarios such de-
tailed information is not available due to video low-
resolution or difficult segmentation (crowded envi-
ronments, e.g. airports, metro stations). Therefore
a robust modelling of a global appearance of an indi-
vidual is necessary to re-identify a given person of
interest. In these identification techniques (named
appearance-based approaches) clothing is the most
reliable information about an identity of an individ-
ual (there is an assumption that individuals wear the
same clothes between different sightings). The model
of an appearance has to handle differences in illumi-
nation, pose and camera parameters to allow match-
ing appearances of the same individual observed in
different cameras.
In (Bak et al., 2011), a highly discriminative hu-
man signature, called Mean Riemannian Covariance
Grid (MRCG), is proposed. This human signature
has been designed to deal with low resolutions im-
ages and crowded environments where more special-
ized techniques (e.g. based on body parts detectors)
might fail. Here, dense descriptors philosophy (Dalal
and Triggs, 2005b) is combined with extremely effec-
tiveness of the covariance descriptor. First, an image
is divided into a dense grid structure with overlapping
spatial square regions (cells). Such dense representa-
tion makes the signature robust to partial occlusions
and it contains a relevant information about spatial
correlations between cells. The authors (Bak et al.,
2011) take advantage of the tracking and detection re-
sults combining information from multiple images.
Let C
p
1
, . . . ,C
p
N
be a set of covariance matrices ex-
tracted during tracking of N frames corresponding to
image square regions at position of the cell p. The
MRC is defined as the mean covariance of these co-
variance matrices computed using Riemannian space
(see Fig. 4). The mean covariance matrix as an intrin-
sic average blends appearance information from mul-
tiple images. This mean covariance matrix keeps not
only information about features distribution but also
carries out essential cues about temporal changes of
the appearance related to the position of the cell p.
All MRC cells compose a full grid, named as Mean
Riemannian Covariance Grid (MRCG).
In our surveillance system, this appearance-based
descriptor is used to match the same appearances be-
tween different camera views.
5 FACE RECOGNITION
5.1 Face Visual Signature Extraction
Similarly to (Huang and Nevatia, 2010) where people
body parts are manually located before being inde-
pendently trained, we manually choose 4 facial parts
(p = [1 : 4]) to model a face i visual signature S
(i)
which are the left eye, right eye, nose and mouth:
S
(i)
=
n
H
(i)
p
; p = [1 : 4]
o
(2)
Each signature H
(i)
p
is represented by a set of SLBP
histograms h
(i)
p,w,h
( f):
H
(i)
p
=
n
h
(i)
p,w,h
( f) ; (w, h) = {(1, 1)..(1, 8)..(8, 8)}
o
h
(i)
p,w,h
( f) =
∑
x∈P
p
s
′
(SLBP
(i)
w,h
(x), f) (3)
s
′
(a, b) =
1 if a = b
0 else
(4)
where P
p
represent the set of pixels within the pre-
defined facial part area. Each histogram h is nor-
malised over the SLBP feature value f = [1 : 16].
5.2 Matching Faces
Two faces i and j are matched if their signatures S
(i)
and S
( j)
are similar enough or in other terms if a dis-
tance measure between the two signatures is below
a threshold. This similarity distance D(i, j) is cal-
culated by the mean similarity distance ∆H
p
(i, j) of
the 4 facial part signatures H
p
defined in equation 2.
Two facial parts similarity is calculated by a weighted
mean of SLBP histogram differences as follows.
D(i, j) = E
p
(∆H
p
(i, j)) (5)
∆H
p
(i, j) =
∑
(w,h)
α
w,h
E
f
h
(i)
p,w,h
( f) − h
( j)
p,w,h
( f)
2
∑
w,h
α
w,h
where cell weight α is inversely proportionally to the
cell lateral distance.
PEOPLE DETECTION AND RE-IDENTIFICATION FOR MULTI SURVEILLANCE CAMERAS
85
6 EVALUATION
6.1 People Detection
We have evaluated our people detection algorithm on
the test human dataset provided by INRIA against
state of the art algorithms which we refer as HOG
(Dalal and Triggs, 2005b) and LBP-HOG (Wang
et al., 2009). The INRIA human dataset is composed
of 1132 human images and 453 images of background
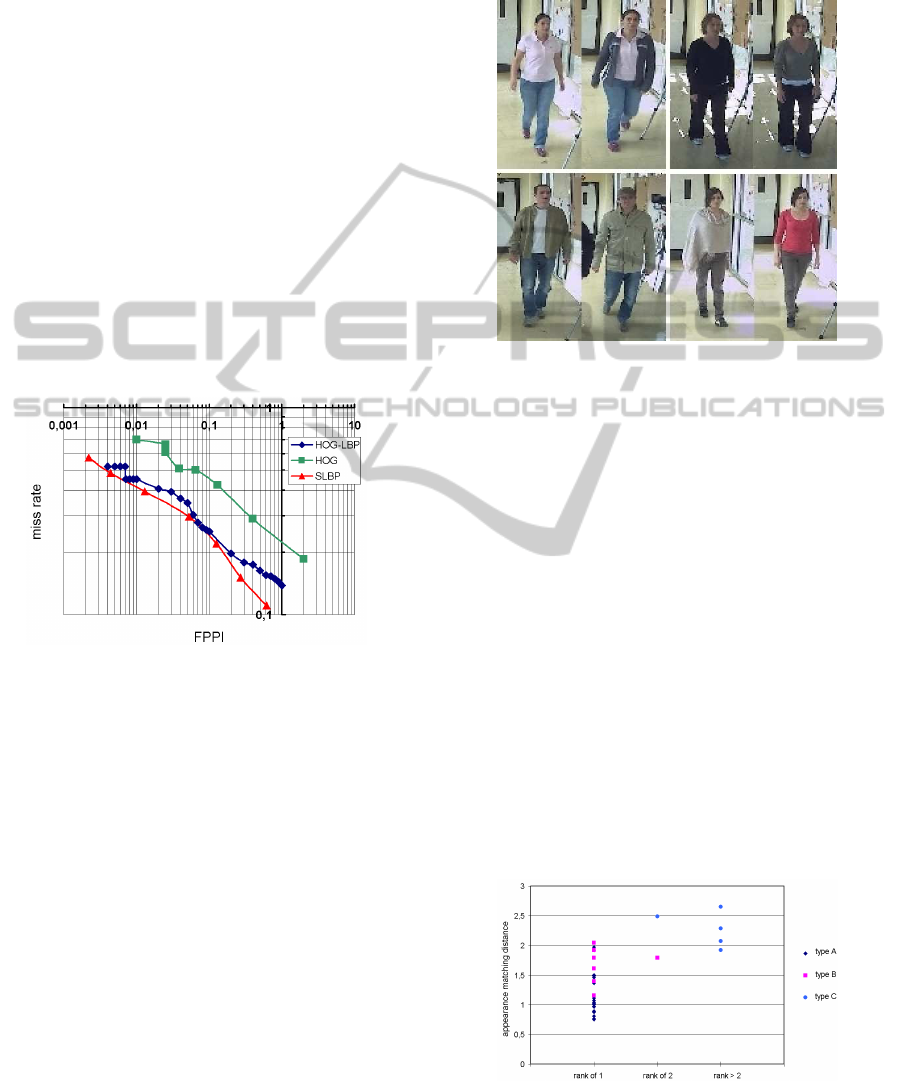
scenes containing no humans. The results are dis-
played in figure 5 which shows that we obtain slightly
better performances than the HOG-LBP technique in
terms of missed detection rate vs. FPPI i.e. False Pos-
itive Per Image. In this figure, two extreme function-
ing modes could be chosen: approximately 2 noisy
detections are obtained every 1000 background im-
ages for 50% true positive detections or 1 noisy de-
tection every 2 frames for a detection rate of approxi-
mately 88%.
Figure 5: People detection evaluation: false positive per im-
age vs. miss detection rate for the INRIA test database.
6.2 Appearance based People
Re-identification
Using the TSP dataset described in section 2, three
kind of people are noted:
• type A - people wearing the same clothes in
recording sessions.
• type B - people slightly change their appearances
from one recording session to the other. For exam-
ple, someone unzipping his/her jacket or someone
taking his/her scarf off as illustrated by the top im-
ages of figure 6.
• type C - people with great change of appearance
such as a person adding a coat with a hat as illus-
trated by the bottom images of figure 6.
We obtain 50 possible comparisonof appearancesthat
we evaluated in section 6.2.1 and 6.2.2. We can note
that people detection and tracking results are noisy
which makes the people re-identification task more
challenging.
Figure 6: Top row: type B - people appearances are suc-
cessfully re-identified despite their weak change of cloth-
ing. Bottom row: type C - people appearances are too dis-
tant to be re-identified.
6.2.1 Same Camera Re-identification Scenario
In this scenario, we aim to re-identify people in a
camera who were previously seen in this same cam-
era. The tracked people appearance signatures are
recorded in a database during the first session. During
the second session, the appearance signatures of all
the tracked people are compared with the database.
We have plotted in figure 7 the appearance match-
ing distance between the same person appearances
for type A, B and C people (defined above). The
results show that people type A and B are success-
fully retrieve with rank 1, except for 1 person with
rank 2, when matching distances are below 2.1. Type
C people (i.e. strong change of appearance) are not
re-identify. However, a uncertainty zone exists for a
matching distance between 1.75 and 2.1.
Figure 7: Evaluation of appearance matching distance in the
same camera scenario.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
86
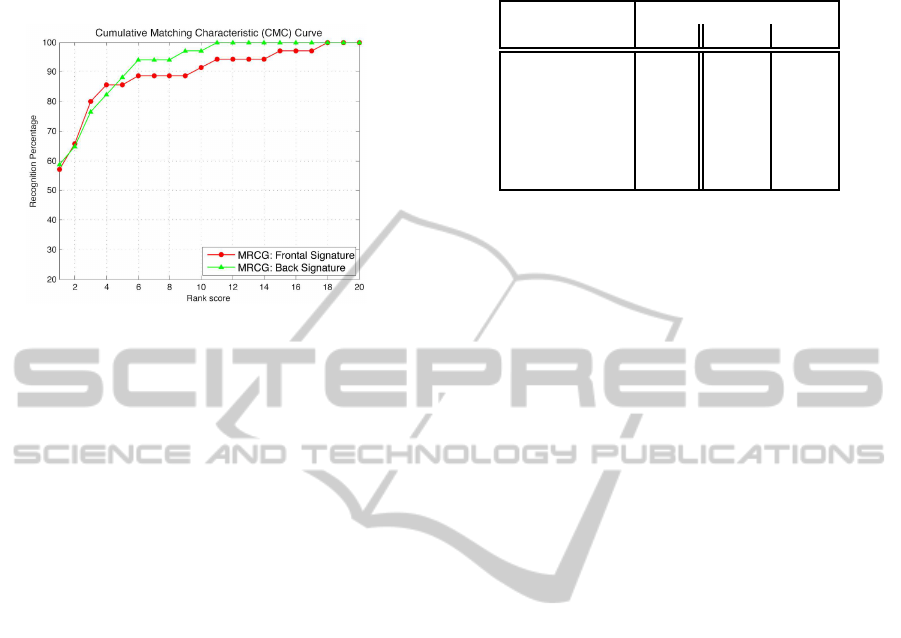
6.2.2 Different Camera Re-identification
Scenario
Figure 8: CMC curves obtained on TSP datasets.
In this section the evaluation of re-identification ap-
proach is presented in a 2 camera network. The
performance is shown using the Cumulative Match-
ing Characteristic (CMC) curve suggested in (Gray
et al., 2007) as the validation method for the re-
identification problem. The CMC curve represents
the expectation of finding the correct match in the top
matches. We evaluate the re-identification in the fol-
lowing way:
• Mono appearance mode - Frontal and back view
of people tracked in camera 1 have their appear-
ance signatures extracted separately.
• Multi appearance mode - Both frontal and back
view of people tracked in camera 2 have their ap-
pearance signatures extracted.
Every signature from camera 1 is used as a query
to the database (multiple-appearance signatures ex-
tracted from camera). The CMC curves for back and
frontal view signatures are presented in Fig. 8. The
results show that despite automatic inaccurate people
detection and the different lighting conditions of the 2
cameras, the system shows promising people appear-
ance based re-identification results.
6.3 Face Recognition
The Olivetti Research Lab i.e. ORL database is
used to evaluate our simple face recognition algo-
rithm using SLBP features. 40 persons constitute this
database with 10 pictures for each subject. All face
pictures are taken by the same camera. Most state of
the art algorithm compare face recognition rate using
one picture at a time. In our scenario, we obtain tracks
of faces for each person which we aim to compare. To
simulate our 2 cameras system, we split the database
Table 1: Face recognition rates.
technique recognition rate %
ORL TSP1 TSP2
DAISY 98.2
PDSIFT 95.5
SIFT Grid 95.2
SLBP 85 91 100
SLBP(rank 1) 98 100 100
SLBP(rank 3) 100 100 100
in two: 5 images are used as our face database col-
lected from one camera and the remaining 5 images
are used as a request from camera 2. The images are
challenging as they contain faces of different kind of
poses and facial expressions.
Table 1 shows the recognition rates comparison
with 3 different techniques. Using an empirically
set threshold (of 0.001), our system recognises only
85% of faces correctly whereas the DAISY technique
(Velardo and Dugelay, 2010) recognises 98% of the
faces correctly. Although our system is far from be-
ing the most performing system, it recognises 98% of
the people when using a rank score of 1 and 100% for
a rank of 3. In other terms, there is 98% chance that
the face giving the closest distance D (in equation 5)
is the correct face.
Using the TSP dataset, we obtained similar per-
formances. Among the 23 persons present in the TSP
database, only 11 people faced long enough camera
1 for a valid trajectory to be obtained: face images
of less than 50x50 pixels were not taken into account
(due to motion noise and image quality artefacts) and
face tracks containing less than 5 face images were
discarded.
In table 1, TSP1 and TSP2 refers to the same cam-
era (camera 1 and camera 2 respectively) recognition
scenario where half of a person face images is saved
in the database and the other half as the request in-
formation. The results show that this simple SLPB
face recognition technique is useful enough for such
a database.
7 CONCLUSIONS
We have presented a multi-cue people re-
identification framework. A novel simplified
LBP feature is proposed to detect people, head and
faces using the Adaboost training scheme. We obtain
state of the art performance for people detection.
We have also extended our approach on appearance
based matching method to multi appearance based
PEOPLE DETECTION AND RE-IDENTIFICATION FOR MULTI SURVEILLANCE CAMERAS
87

people re-identification. The proposed system tracks
people and their faces allowing the user to associate
an appearance with a face. In most networks,
cameras cannot provide the full people appearance
view (e.g. strong occlusion) and faces are often not
visible or only partly visible. Our proposed approach
would allow a user to scan throughout a network of
surveillance cameras the best matching candidates
and to be able to track people of interest throughout
this network.
ACKNOWLEDGEMENTS
We would like to thank the ANR project ’VideoId’
who partially founded this work and the following
partners of the project: Biometrics Groups at TELE-
COM SudParis, Multimedia Image processing Group
of Eurecom and T3S (Thales Security Systems and
Solutions S.A.S.).
REFERENCES
Adam, A., Rivlin, E., and Shimshoni, I. (2006). Robust
fragment-based tracking using integral histogram. In
Computer Vision and Pattern Recognition - CVPR.
Avanzi, A., Bremond, F., and Thonnat, M. (2001). Track-
ing multiple individuals for video communication. In
In IEEE Proc. of International Conference on Image
Processing, Thessaloniki (Greece).
Bak, S., Corvee, E., Bremond, F., and Thonnat, M. (2010a).
Person re-identification using haar-based and dcd-
based signature. In 2nd Workshop on AMMCSS.
Bak, S., Corvee, E., Bremond, F., and Thonnat, M. (2010b).
Person re-identification using spatial covariance re-
gions of human body parts. In AVSS.
Bak, S., Corvee, E., Bremond, F., and Thonnat, M. (2011).
Multiple-shot human re-identification by mean rie-
mannian covariance grid. In AVSS.
Bazzani, L., Cristani, M., Perina, A., Farenzena, M.,
and Murino, V. (2010). Multiple-shot person re-
identification by hpe signature. In ICPR, pages 1413–
1416.
Dalal, N. and Triggs, B. (2005a). Histograms of Oriented
Gradients for Human Detection. In Computer Vision
and Pattern Recognition - CVPR.
Dalal, N. and Triggs, B. (2005b). Histograms of oriented
gradients for human detection. In CVPR, pages 886–
893.
Dollar, P., Wojek, C., Schiele, B., and Perona, P. (2009).
Pedestrian detection: a benchmark. In CVPR.
Farenzena, M., Bazzani, L., Perina, A., Murino, V., and
Cristani, M. (2010). Person re-identification by
symmetry-driven accumulation of local features. In
CVPR, pages 2360–2367.
Gallagher, A. C. and Chen, T. (2008). Clothing cosegmen-
tation for recognizing people. In CVPR, pages 1–8.
Gheissari, N., Sebastian, T. B., and Hartley, R. (2006). Per-
son reidentification using spatiotemporal appearance.
In CVPR, pages 1528–1535.
Gray, D., Brennan, S., and Tao, H. (2007). Evaluating Ap-
pearance Models for Recognition, Reacquisition, and
Tracking. PETS.
Gray, D. and Tao, H. (2008). Viewpoint invariant pedestrian
recognition with an ensemble of localized features. In
ECCV, pages 262–275.
Huang, C. and Nevatia, R. (2010). High performance object
detection by collaborative learning of joint ranking of
granules features. IEEE - CVPR 2010.
Hussein, M., Porikli, F., and Davis, L. (2009). Object de-
tection via boosted deformable features. IEEE Inter-
national Conference on Image Processing (ICIP).
Laptev, I. (2006). Improvements of object detection using
boosted histograms. In Proceedings of the British Ma-
chine Vision Conference.
Lin, Z. and Davis, L. S. (2008). Learning pairwise dis-
similarity profiles for appearance recognition in visual
surveillance. In ISVC, pages 23–34.
Mikolajczyk, K., Schmid, C., and Zisserman, A. (2004).
Human detection based on a probabilistic assembly of
robust part detectors. In ECCV.
Mohan, A., Papageorgiou, C., and Poggio, T. (2001).
Example-based object detection in images by com-
ponents. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 23:349–361.
Park, U., Jain, A., Kitahara, I., Kogure, K., and Hagita, N.
(2006). Vise: Visual search engine using multiple net-
worked cameras. In ICPR, pages 1204–1207.
Prosser, B., Zheng, W.-S., Gong, S., and Xiang, T. (2010).
Person re-identification by support vector ranking. In
BMVC, pages 21.1–21.11.
Schwartz, W. R. and Davis, L. S. (2009). Learning discrim-
inative appearance-based models using partial least
squares. In SIBGRAPI, pages 322–329.
Trefny, J. and Matas, J. (2010). Extended Set of Local Bi-
nary Patterns for Rapid Object Detection. In Com-
puter Vision Winter Workshop 2010 - CVWW10.
Tuzel, O., Porikli, F., and Meer, P. (2008). Pedestrian detec-
tion via classification on riemannian manifolds. PAMI,
30(10).
Velardo, C. and Dugelay, J. (2010). Face recognition
with daisy descriptors. In MM’10 and Sec’10, ACM
SIGMM Multimedia and Security Workshop, Septem-
ber 9-10, Rome, Italy.
Viola, P. and Jones, M. (2004). Robust real-time face detec-
tion. In International Journal of Computer Vision.
Wang, X., Doretto, G., Sebastian, T., Rittscher, J., and Tu,
P. (2007). Shape and appearance context modeling. In
ICCV, pages 1–8.
Wang, X., Han, T., and Yan, S. (2009). An hog-lbp human
detector with partial occlusion handling. ICCV09 -
International Conference on Computer Vision.
Zhu, Q., Avidan, S., Yeh, M., and Cheng, K. (2006). Fast
human detection using a cascade of histograms of
oriented gradients. In Computer Vision and Pattern
Recognition - CVPR.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
88
