
FAST NEAREST NEIGHBOR SEARCH IN PSEUDOSEMIMETRIC
SPACES
Markus Lessmann and Rolf P. W¨urtz
Institut f¨ur Neuroinformatik, Ruhr-University Bochum, Bochum, Germany
Keywords:
Locality-sensitive Hashing, Differing Vector Spaces.
Abstract:
Nearest neighbor search in metric spaces is an important task in pattern recognition because it allows a query
pattern to be associated with a known pattern from a learned dataset. In low-dimensional spaces a lot of good
solutions exist that minimize the number of comparisons between patterns by partitioning the search space
using tree structures. In high-dimensional spaces tree methods become useless because they fail to prevent
scanning almost the complete dataset. Locality sensitive hashing methods solve the task approximately by
grouping patterns that are nearby in search space into buckets. Therefore an appropriate hash function has
to be known that is highly likely to assign a query pattern to the same bucket as its nearest neighbor. This
works fine as long as all the patterns are of the same dimensionality and exist in the same vector space with a
complete metric. Here, we propose a locality-sensitive hashing-scheme that is able to process patterns which
are built up of several possibly missing subpatterns causing the patterns to be in vector spaces of different
dimensionality. These patterns can only be compared using a pseudosemimetric.
1 INTRODUCTION
Nearest neighbor search (NN search) in high-
dimensional spaces is a common problem in pattern
recognition and computer vision. Examples of possi-
ble applications include content-based image retrieval
(CBIR) (Giacinto, 2007), which describes techniques
to find the image most similar to a query image in
a database, as well as optical character recognition
(OCR)(Sankar K. et al., 2010), where letters and
words in an image of a text are recognized automat-
ically to digitize it. Another field in which the prob-
lem arises is object recognition by feature extraction
and matching as in the approach of (Westphal and
W¨urtz, 2009). This system extracts features, which
are called parquet graphs, from images during learn-
ing and stores them together with additional informa-
tion about object identity and category in a codebook.
During recall features of the same kind are drawn
from a test image and for each of them the nearest
neighbor in the codebook is found. The additional in-
formation is then used for voting about possible object
identity or category.
All these examples spend a lot of their total com-
putational resources on nearest neighbor search. To
make them able to handle large databases (also called
codebooks from now on) they need methods for fast
NN search. In the case of spatially extended fea-
tures used together with segmentation masks, like in
(W¨urtz, 1997) for face recognition and (Westphal and
W¨urtz, 2009) for general object recognition, a further
problem arises.
A multidimensional template or a parquet graph
describes a local image patch using Gabor descrip-
tors called jets at a small range of positions and can
incorporate segmentation information by deactivating
jets at positions outside the object. Thus, the parquet
graph is enhanced with a segmentation mask with the
values active or inactive. The comparison function
between two parquet graphs uses only the positions
that are active in both graphs. By means of differ-
ent allocation patterns of active and inactive positions
parquetgraphs divide into several groups of vectors of
different dimensions. This renders known techniques
for nearest neighbor search useless because they rely
on the triangle inequality which is only valid if all
vectors belong to the same metric space. We will
present a search technique that is able to handle this
problem.
The outline of this article is as follows: in sec-
tion 2 we will introduce nearest neighbor search tech-
niques for low-dimensional metric spaces. Then
we explain the problem of high-dimensional near-
est neighbor search (curse of dimensionality) and the
locality-sensitive-hashing scheme (LSH) as an ap-
proximate solution. In section 3 parquet graphs are
667
Lessmann M. and P. Würtz R..
FAST NEAREST NEIGHBOR SEARCH IN PSEUDOSEMIMETRIC SPACES.
DOI: 10.5220/0003809006670674
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 667-674
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

presented and it is made clear why the original LSH
scheme is not suited for them. Section 4 presents our
LSH scheme fitted to the special demands of parquet
graphs. Section 5 shows result of experiments that
were conducted using our technique, original LSH
and exhaustive search for comparison. The conclu-
sion is given in section 6.
2 OVERVIEW NEAREST
NEIGHBOR SEARCH
Of course, NN search can always be performed us-
ing exhaustive search. That means the query vector is
compared to all vectors in the database and minimal
distance as well as index of the nearest neighbor are
updated after each comparison. For big codebooks
this methods becomes prohibitive because of compu-
tational cost.
In low-dimensional spaces several efficient meth-
ods for NN search exist. The most prominent one is
the kd-tree (Bentley, 1975). It builds a binary tree
structure using the given codebook of vectors and
thereby bisects the search space iteratively in each
dimension. At first, all vectors are sorted according
to the value of their first component. Then the vec-
tor whose value is the median is assigned to the root
node. This means the root stores the median value
and a pointer to the complete vector. All other vectors
are now split into two groups depending on whether
their first component value was higher or lower than
the median. Now both groups are sorted according to
their second components and again medians are de-
termined. Their vectors become the root nodes of two
new subtrees, which become left and right children
of the first root node. This process is repeated until
all vectors are assigned to a node. If the depth of the
tree gets higher than the number of dimensions the
first dimension is taken again for determining median
values.
NN search now works in the following way: the
query vector is compared to the vector of the root
node and the complete and single dimension distance
are computed. Since the complete squared Euclidean
distance is the sum of the squared Euclidean distances
of all single dimensions the complete distance be-
tween two vectors can never be smaller than their
distance in only one dimension. Therefore, an esti-
mate of the complete distance to the nearest neighbor
is updated while traversing the tree. If the distance
to a vector in one dimension is already bigger than
the current estimate this vector cannot be the near-
est neighbor and neither can all its (left or right) chil-
dren, which are even more distant in the actual di-
mension. This means that only one of the two sub-
trees has to be scanned further and thus the number
of necessary complete distance calculations and also
the search time is O(log(n)) in the optimal case with
n being the number of vectors in the codebook. This
method does not work in high-dimensional spaces be-
cause of the curse of dimensionality. It means that
distances between arbitrary points in metric spaces
become more and more equal with increasing num-
ber of dimensions. This leads to the fact that fewer
and fewer subtrees can be discarded in the kd-tree
search and almost the complete database needs to be
scanned. The search-time thus grows from O(log(n))
to O(n). The first method to provide at least an ap-
proximate solution to NN search in high-dimensional
spaces is called locality-sensitive-hashing (LSH). In
its version for metric spaces (Datar et al., 2004) it uses
a special hash function that assigns vectors to buckets
while preserving their neighborhood relations. The
hash function is based on a (2-stable) Gaussian distri-
bution G . 2-stable means for the dot product of vector
~a, whose components are drawn from the Gaussian
distribution G and vector~v:
~a·~v ∝ k~vk
2
· A , (1)
where A is also a Gaussian distributed random num-
ber. This dot product projects each vector onto the
real line. For two different vectors ~u and ~v their dis-
tance on the real line is distributed according to:
~u·~a−~v·~a ∝ k~u−~vk
2
· A . (2)
This means that the variance of the distribution in-
creases proportionally to the distance of the vectors in
their vector space. Therefore, vectors with a smaller
distance in the metric space have a higher probability
of being close to each other on the real line. Chopping
the real line into bins of equal length leads to buckets
containing adjacent vectors. The complete hash func-
tion is
H(~v) = ⌊
~a·~v+ b
W
⌋, (3)
W being the bin width and b a random number drawn
from an equal distribution in the range 0 to W. A
query vector is then mapped to its according bucket
and compared with all vectors within it. Since only
a fraction of all codebook vectors is contained in this
bucket search is sped up. It is always possible that a
vector is not projected into the bucket of its nearest
neighbor but to an adjacent one. Then not the real
nearest neighbor is found but only the l nearest neigh-
bor (where l is not known). Thus it is not an exact
but an approximate method. To increase the probabil-
ity of finding the true nearest neighbors (also called
hit rate within this paper) the vectors from the dataset
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
668

can be mapped to several buckets using several differ-
ent hash functions. Scanning multiple compilations
of adjoining vectors increases the probability to find
the true nearest neighbor.
3 PARQUET GRAPHS
Parquet Graphs (Westphal and W¨urtz, 2009) are fea-
tures that describe an image patch of a certain size by
combining vectors of Gabor descriptors or jets (Lades
et al., 1993) in a graph structure. The jets are ex-
tracted from a 3 × 3 rectangular grid. Jets contain
absolute values of Gabor wavelet responses in 8 di-
rections and 5 scales, which means that they are 40
dimensional vectors. Thus a full parquet graph con-
sists of 9 jets and can be seen as an 360 dimensional
vector in a metric space. Two jets can be compared
by calculating their normalized dot product resulting
in a similarity measure between 0 and 1. The jet is
stored in normalized form throughout the process, so
a single dot product is enough for calculating similar-
ities. Two parquet graphs can be compared by com-
paring their jets on corresponding positions and then
averaging the similarity values. Segmentation infor-
mation of a training image can be incorporated into
the parquet graph by labeling grid positions inactive
that have not been placed on the object. The respec-
tive jet then does not contain information about the
object and is not used for comparison. For matching
of two parquet graphs only grid positions labeled ac-
tive in both parquet graphs are used for calculating
the average similarity. For each parquet graph at least
the center position is active by definition, therefore all
parquet graphs can be compared to each other.
For NN search in parquet graphs with inactive
positions none of the existing methods can be used.
Because of the different dimensionality of the fea-
tures the triangle inequality is invalid, which would be
needed to draw conclusions about distances of vectors
that have not been compared directly.
4 PROPOSED SYSTEM
4.1 General Application Flow
As LSH is the only applicable technique in high-
dimensional spaces we base our method on it. Since
the hash function is the essential element that cap-
tures neighborhood relations of vectors we have to
replace it with a new function that is suited for our
requirements. This new function has to somehowcap-
ture spatial relationships between parquet graphs. The
only way to do this is to use the parquet graphs them-
selves. This works as follows: a small subset K of
K parquet graphs, which we will call hash vectors,
is selected from the codebook. Now each vector in
the codebook is compared with them, yielding K dif-
ferent similarity values between 0 and 1. These are
now transformed into binary values using the Heavi-
side function with a threshold t
i
:
b
i
= H(s
i
− t
i
), (4)
yielding a bit string of length K. This string, inter-
preted as a positive integer, is the index of the bucket
in which the vector is stored. Storing means that ei-
ther the bucket contains a list of indices of vectors that
belong to it or has a local data array which holds the
corresponding vectors. Since we are using special-
ized libraries for matrix multiplication to compute dot
products of query and codebook vectors, local stor-
age is the faster method and used in our approach.
By storing the buckets in an array of length 2
K
each
bucket can be accessed directly by its hash value.
The assumption behind this definition is that par-
quet graphs behaving similarly in relation to a set
of other parquet graphs, are more similar than those
that do not. Therefore they are assigned to the same
bucket. In a query a hash value is computed for the
query vector in the same way. Then the according
bucket has to be scanned by exhaustive search. It is
possible that this query bucket is empty. Then the
non-empty buckets with the most similar bit strings
have to be determined. This means a NN search in
Hamming space has to be performed by probing the
bit strings with Hamming distance of 1, 2, 3 and so
forth one after another until an occupied bucket is
found for a given distance. If there are several filled
buckets in the same Hamming distance they are all
scanned. Bit strings with Hamming distance D are
easy to compute by applying a bitwise XOR on the
query bit string and a string of the same length that
contains 1 at D positions and 0 at the remaining ones.
These perturbation vectors are precomputed before
the search starts. The maximal possible Hamming
distance D
max
of a query can also be computed in ad-
vance by comparing all bit strings found in the code-
book with all other possible bit strings of length K.
The perturbation vectors are then precalculated up to
the distance D
max
.
4.2 Selection of Hash Vectors and
Thresholds
The crucial point in this method is the selection of the
K parquet graphs used for deriving the hash values
and their corresponding thresholds t
i
. If vectors and
FAST NEAREST NEIGHBOR SEARCH IN PSEUDOSEMIMETRIC SPACES
669

respective thresholds are chosen poorly, they assign
the same hash value to each vector of the database,
and the resulting search becomes exhaustive. The
ideal case is when the vectors are distributed equally
across the possible 2
K
bit strings. Then each bucket
contains
n
2
K
vectors and only a small subset of the
complete database has to be scanned. Because of the
differing metric spaces in which parquet graphs can
be compared it is hardly imaginable how such vectors
could be calculated from scratch. Instead we will se-
lect suitable vectors first and then chose an threshold
for each of them one after another such that codebook
vectors are distributed most equally onto the buckets.
Hash vectors need to be as dissimilar as possible,
such that comparison with them yields a maximum of
differing information. Suppose that all hash vectors
are chosen. Now all codebook vectors are compared
with the first one and a threshold is chosen that gives
an optimal distribution (for one half of the codebook
vectors b
1
is 0 and for the other 1). Comparison with
the second hash vector should now be able to further
subdivide these 2 groups into 4 different groups of al-
most the same size. This will only be possible if the
second hash vector is very dissimilar to the first, oth-
erwise it would assign the same bit value to all vec-
tors which are already in the same group, giving 2
buckets of the same size and 2 empty ones. Therefore
hash vectors are chosen first in an evolutionary opti-
mization step. In a fixed number of tries a codebook
vector is selected randomly. Then it is compared to
all other vectors and the one with the lowest similar-
ity is used as second hash vector. Now both vectors
are compared with the rest and the codebook vector
whose maximum similarity to both of them is min-
imal is chosen. This is repeated until an expected
maximal number of hash vectors that will be needed
is reached. The maximal similarity between any two
hash vectors is used as a measure of the quality of the
selected vectors. After, e.g., 1000 trials the codebook
vector with the lowest quality measure is chosen (the
remaining hash vectors are exactly determined by that
choice). The thresholds are then fixed sequentially: t
i
is increased in steps of 0.01 from 0.0 to 1.0 and vec-
tors are divided into groups according to it. To check
the created distribution the following fitness function
is computed. Let
p
i
=
n[i]
n
, (5)
with n[i] being the number of vectors in bucket i. This
is the percentage of codebook vectors contained in
that bucket. The optimal percentage of each bucket
is
p =
n
2
K
. (6)
Absolute differences of these values are added for
each bucket to give the quality measure
f(K) =
2
K
∑
i=1
|p
i
− p| . (7)
The threshold yielding a minimum f(K) is selected.
Another possible measure we tested is the entropy of
the distribution, which becomes maximal for an uni-
form distribution. The problem is that the entropy also
becomes high if one bucket contains the majority of
vectors and the remaining ones are distributed equally
on the remaining buckets, which is a very unfavorable
situation.
4.3 Scanning Additional Buckets
As already mentioned the method will not give the
real nearest neighbor in some cases. To be useful we
expect it to be correct in ca. 90% of all cases. In
the original LSH scheme the hit rate was increased
by adding further partitionings of the codebook and
thus checking several buckets that were constructed
using different hash functions. To reduce memory de-
mand(Lv et al., 2007) have devised a way of scanning
additional buckets of the same partitioning in search
of the true nearest neighbor. This method is called
multi-probe LSH. The idea behind this approach is,
that buckets should be probed first if their hash value
would have resulted from smaller displacements of
the query vector than the hash values of others would
have. If, e.g., in the original LSH we use only one
hash function then each buckets corresponds to one of
the bins, into which the real line is fragmented. If the
current bin does not contain the correct nearest neigh-
bor most likely one of the adjacent bins would. Fur-
ther, if the query vector is projected on a value closer
to the left neighbor bin it is more probable that this
bin contains the correct nearest neighbor. Therefore,
it should be scanned before the right neighbor bin. If
several hash functions are used the number of neigh-
boring bins increases exponentially. In (Lv et al.,
2007) Lv et al. present a scheme that assigns each
possible bucket (relative to the current) a score that
describes its probability to contain the correct nearest
neighbor and creates the corresponding changes in the
query hash value in the order of decreasing probabil-
ity (see reference for details). Although we do not
have bins of the real line in our approach we can use
this scheme as well. In our case everything depends
on the similarities to the hash vectors. For an exam-
ple with K = 3, assume the following similarities for
a query: 0.49,0.505,0.78 and that all the thresholds
are set to 0.5. The first and second value are pretty
close to the threshold that decides if their respective
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
670
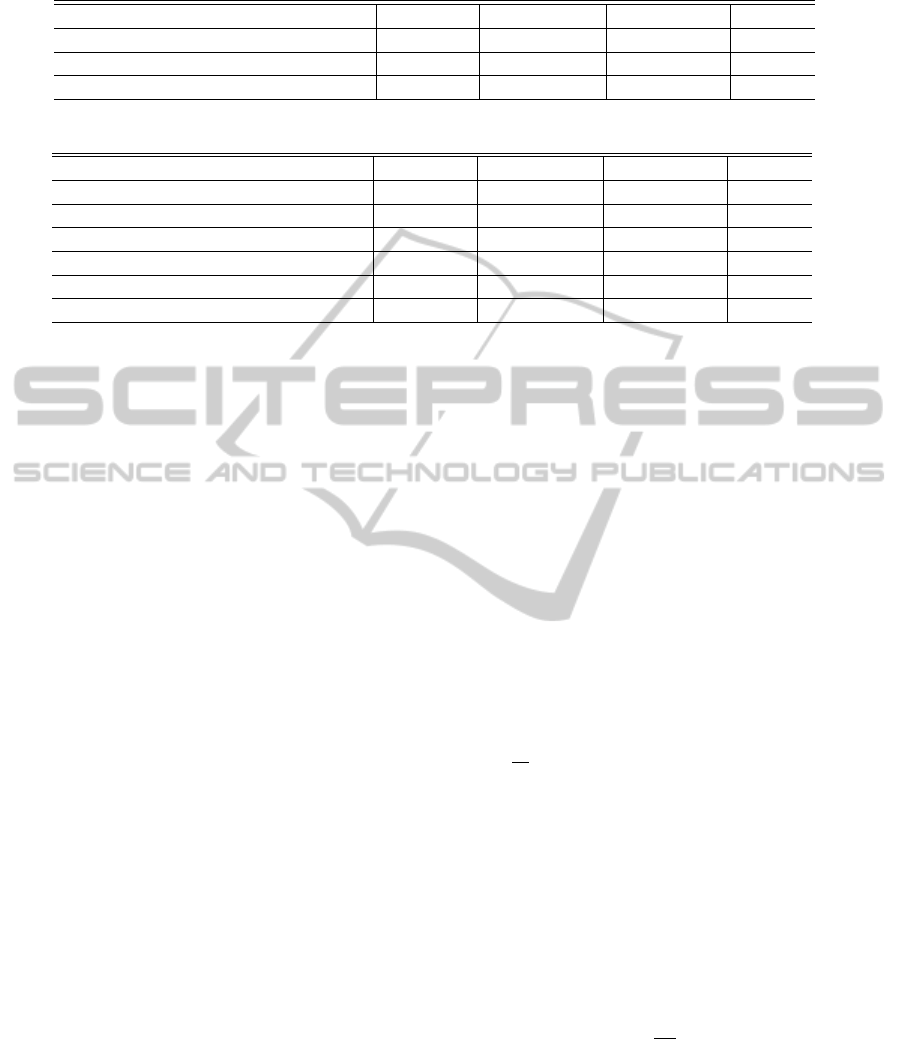
Table 1: 216054 NN searches in a codebook containing 45935 parquet graphs with active and inactive jets.
Method Time(sec) av.Time(sec) % of vectors Hit rate
Linear search 4798.98 0.0222 100.0 100.0
Fast search, online parameter tuning 773.97 0.0036 14.13 90.61
Fast search, manual parameter tuning 723.99 0.0034 13.42 90.69
Table 2: 216054 NN searches in a codebook containing 45779 parquet graphs with only active jets.
Method Time(sec) av.Time(sec) % of vectors Hit rate
Linear search 6144.88 0.0284 100.0 100.0
Fast search, online parameter tuning 716.88 0.0033 10.22 90.34
Fast search, manual parameter tuning 654.93 0.0030 9.44 90.66
LSH, online parameter tuning 1321.91 0.0061 7.52 97.25
LSH, offline parameter tuning 997.06 0.0046 13.24 98.60
LSH, manual parameter tuning 579.36 0.0027 5.47 90.03
bit is set to 1 or not. Although the current query
bit string is 011, a string of 111 (for the true near-
est neighbor) is also possible. A bit string 001 is even
more likely because 0.505 is closer to the threshold
than 0.49. In this case the proposed scheme decides
which bit string should be checked first. The number
of additional scanned buckets will be determined dur-
ing search by devising the percentage P of codebook
vectors that will be scanned. The higher this percent-
age the more additional buckets will be scanned. The
percentage will depend on the desired hit rate.
It is also possible to use several partitionings given
by different sets K of hash vectors. If only indices of
codebook vectors are stored in the buckets this can
help to further reduce search time because in a well
chosen additional partitioning the first few scanned
buckets have higher probabilities to contain the true
nearest neighbors than the last buckets that have to be
checked in a single partitioning. Since different parti-
tionings contain the same vectors it can and will hap-
pen that a currently probed bucket of the second par-
titioning contains vectors which were already found
in the first partitioning. If only indices of vectors are
stored each index can be checked to prevent multiple
comparisons of a codebook vector with the query vec-
tor. This is not possible for local storage of vectors.
In this case unnecessary redundant calculations arise,
which keep the search from benefiting from the usage
of additional partitionings.
4.4 Parameter Determination
To use the proposed scheme two parameters have to
be determined: K and the percentage of codebook
vectors P that needs to be scanned. A lot of effort
was put on the task of creating test vectors that can
be used for determination of these two parameters. In
the end none of the devised schemes was satisfying
and they were forsaken. The percentage P depends
too strongly on the actual query vectors rather than the
codebook itself. Methods like the original LSH in the
LSHKIT-implementation assume a certain (gamma-
) distribution of the codebook vectors and the query
vectors and use this assumption for parameter deter-
mination. Since parquet graphs are compared in a lot
of possibly differing vector spaces we cannot make
the same presumption. Additionally, we found dur-
ing testing of our method in a different setting with
clearly not gamma-like distributed data that it is bet-
ter to exclude any assumptions about the data distribu-
tion. Therefore, we do the following: K is determined
for each codebook in advance, while the percentage
of scanned codebook vectors is adjusted online dur-
ing search.
The parameter K is set according to the following
consideration. In the best case each bucket contains
n[i] =
n
2
K
vectors. For scanning a single bucket one
will have then to compute the product of the query
vector with K hash vectors and n[i] vectors in the
bucket. If K is bigger than n[i] more time is spent for
computing the hash value than for probing the bucket.
In that case it is better to decrease K such that the
hash value is computed faster and instead more vec-
tors in the codebook are scanned, which increases the
probability to find the true nearest neighbor there. To
guarantee that less time is spent on hash value com-
putation than on scanning of buckets we impose the
condition
n[i] =
n
2
K
> 2· K (8)
to get an upper bound for K. On the other hand, K
should not be too small, otherwise the codebook is
not split up enough and a lot of possible gain in speed
search is wasted. Hence we chose just the maximum
value for K that fulfills our condition. This scheme
provides us with good values for K.
The percentage P of scanned codebook vectors
FAST NEAREST NEIGHBOR SEARCH IN PSEUDOSEMIMETRIC SPACES
671
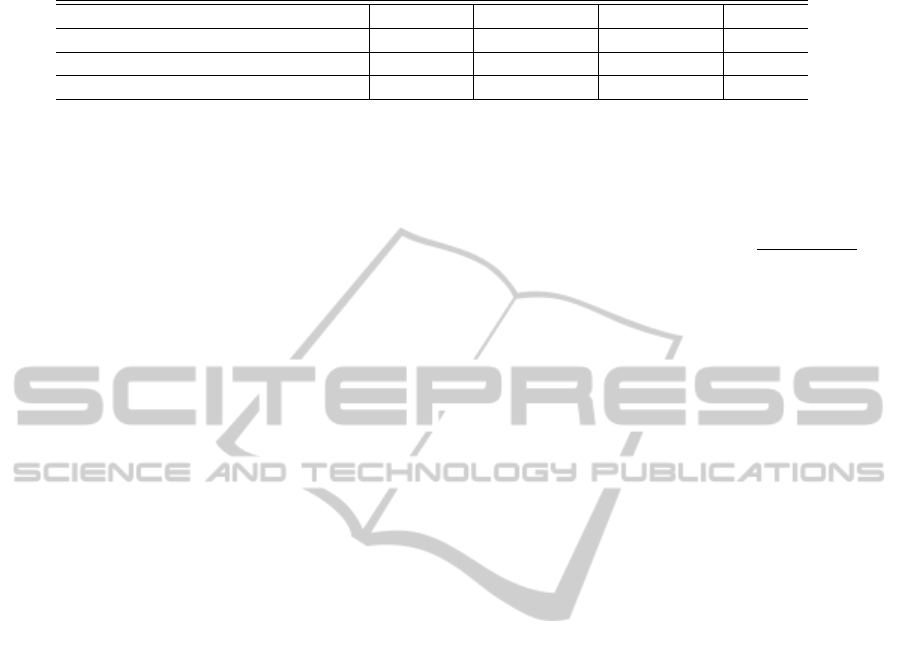
Table 3: 216054 NN searches in a codebook containing 88951 parquet graphs with only active jets.
Method Time(sec) av.Time(sec) % of vectors Hit rate
Parallel linear search 2870.75 0.0133 100.0 100.0
Fast search, online parameter tuning 1103.38 0.0051 8.24 90.50
LSH, offline parameter tuning 1453.45 0.0067 11.82 98.79
is adjusted during search. To do this in the first 10
searches all buckets are scanned and the percentage
of probed vectors after which the nearest neighbor
was found is stored in a histogram. After these lin-
ear searches the percentage needed to get the desired
hit rate can be read from the histogram.
It may seem more natural to determine instead the
number T of visited buckets. If the codebook was
distributed uniformly on the buckets this would give
exact the same results. But in practice buckets will
contain different numbers of vectors and a fixed num-
ber of buckets causes the method to scan fewer vec-
tors in some searches than in others, which decreases
the probability of finding the true nearest neighbor.
Therefore, it turned out that fixing the amount of
scanned vectors (via the percentage) works better than
fixing T. The percentage P is further changed dur-
ing search because the statistics of the query data may
change. To do this every 1000 searches 10 complete
scans are done for determining P.
4.5 Extending the Scheme to k-nearest
Neighbor Search
The scheme can also be used for kNN search. The
only change that has to be done is that not only the in-
dex of the current nearest neighbor estimate is stored
but also the indices of the k vectors that have been
closest to the query vector.
4.6 Extending the Scheme to Euclidean
Pseudosemimetric
Instead of the normalized scalar product the scheme
also works with (averaged) squared Euclidean dis-
tances. These can also be computed using the dot
product because of the relation
(~x−~y)
2
= k~xk
2
− 2~x·~y+ k~yk
2
. (9)
The squared norms of the codebook vectors and hash
vectors are computed once before the search and
stored in a container. During search the squared norm
of the query vector and its dot products with hash and
codebook vectors are computed and the Euclidean
distance (averaged over subspaces) is computed. The
rest of the scheme stays the same. The hash vectors
now have to be as distant as possible (which of course
resembles the dissimilarity condition) and the possi-
ble distances between a query vector and a hash vec-
tor are not restricted to [0, 1] but to [0, ∞]. Therefore,
the minimal and maximal distances of any codebook
vector to any hash vector are determined. The thresh-
olds are then checked in steps of δ =
maxDis−minDis
1000
.
5 EXPERIMENTS
As our scheme is the only one besides exhaustive
search that can handle parquet graphs with inactive
jets we compare it with linear search as reference.
For complete activated parquet graphs we take the
LSH implementation of the LSHKIT C++ library by
Wei Dong (Dong, 2011) as an additional compari-
son. This library implements the multi-probe local-
ity sensitive hashing scheme from (Lv et al., 2007).
It uses the squared Euclidean distance for comparison
of vectors, which gives the same result as normalized
dot product, as can be seen from equation (9) with
k~xk
2
= k~yk
2
= 1. The most similar vector (~x ·~y = 1)
is also the closest in Euclidean space.
Linear search was done by storing the complete
database in a single matrix and then computing the
matrix-matrix-product of query vector and codebook
matrix. All components belonging to inactive jets are
set to 0. Normalization by the number of coinciden-
tally active jets is done by storing the allocation pat-
tern as an unsigned int between 0 and 511. Each bit
indicates the status (active or inactive) for a jet. By
bitwise AND of two such patterns and subsequent
counting the number of bits set to 1 the appropriate
normalization factor is found and the dot product is
divided by it.
NN search was tested within the frame of an sim-
ple object recognition system. This system learns a
codebook of parquet graphs from a set of training im-
ages by vector quantization. Each extracted parquet
graph is added to the codebook if its highest similarity
to any codebook parquet graph is less than an thresh-
old set to 0.92 in these tests. Together with these
features information about the current object category
is stored. During recognition parquet graphs are ex-
tracted from test images and their nearest neighbor
in the codebook is found. Its corresponding category
information is then used in a voting scheme to deter-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
672

mine the category of the current object. Time for NN
search was measured separately during recognition.
Two different codebooks were used: the first contains
inactive jets and can therefore only be handled by lin-
ear search and our method, the second comprises only
parquet graphs of which every jet is active. The latter
codebook is used to compare our method with origi-
nal LSH.
For being able to evaluate the potential of both
systems independent of parameter determination we
run the tests for them once with hand-tuned parame-
ters and once with parameters detected by the meth-
ods. The LSHKIT also offers the possibility of online
adaptation of the number of scanned buckets. This
was tested, too. All tests were run 5 times and the av-
erage search time was recorded. The biggest standard
deviations were 14.5 sec for linear search and 14.34
sec for LSHKIT search with online parameter deter-
mination on the second codebook. All others were
below 7.0 sec and several also below 3.0 sec. The
following tables summarize all test results. The first
column gives search time for all searches, the second
average time per search, the third the percentage of
scanned codebook vectors and the last the hit rate.
Table 1 clearly shows the superiority of our
method compared to linear search. Our nearest
neighbor search is considerably faster than exhaustive
search and needs only 16.13% respectively 15.09% of
linear search time, which fits relatively well with the
according percentages of scanned codebook vectors.
For the second codebook (table 2) the percentages
of search time are (in the order of the table) 11.67%,
10.66%, 21.51%, 16.23% and 9.43%. This is also in
relative good accordance to the amount of scanned
vectors for our method, for LSHKIT the difference
is bigger. It seems that on that codebook LSHKIT
spends relatively more time on hash value computa-
tion than our approach. The second codebook shows
also that our method is potentially not as good as the
original LSH in the LSHKIT-implementation, which
only needs to look at 5.47% of all vectors for man-
ual tuned parameters. For automatic parameter detec-
tion LSHKIT is slower than our method but gives a
higher hit rate (at the cost of scanning more vectors
than necessary for desired hit rate). In case of online
determination the scan amount is lowered to 7.52%,
but search time is worse than for offline determination
with only slightly smaller recognition rate. Thus on-
line determination seems to scan the codebook more
efficiently but does not lead to better approximation to
the desired recognition rate and needs additional time
for parameter adaptation. This may be due to non-
gamma-distributed data in our tests. The superiority
of LSHKIT can highly likely be ascribed to a better
partitioning of the search space than in our method.
In our search scheme this strongly depends on the se-
lected hash vectors. By testing more than 1000 vec-
tors as first hash vector (maybe all codebook vectors)
this can be improved, but time for parameter determi-
nation increases considerably.
Additionally, we tried to increase search speed
by using Intel’s MKL (INTEL, 2011) (version
10.2.6.038) for speeding up matrix multiplication.
This library is optimized for Intel CPUs to do al-
gebraic calculations as fast as possible. To our as-
tonishment it turned out that using the library ac-
tually diminished the performance of our system.
Even when using the special functions for matrix-
vector and vector-vector products the computation
took more time on our test system than when using the
boost ublas product functions (BOOST, 2011). MKL
needs certain sizes of both matrices for being able to
accelerate multiplication. If this condition is fulfilled
it makes a substantial difference. We run an addi-
tional test with linear search on all parquet graphs of
each single image in parallel on the second codebook.
This gave a search time of 1009.02 sec (standard devi-
ation 2.97 sec) for parallel linear search (4.7msec per
search). This result is clearly slower than our method
when aiming at a hit rate of 90 %. But if one compares
it to LSHKIT with offline parameter determination
and a hit rate close to 100 % it is only slightly slower
while being completely exact. Is it therefore recom-
mendable to do parallel linear search if very high hit
rates are needed? To test this we created a third code-
book of 88951 parquet graph jets, almost twice as
big as the others. For this we got the following re-
sults (table reftab:tab3) Parallel linear search (stan-
dard deviation 2.11 sec) was clearly slower than our
method (standard deviation 5.49 sec) and LSHKIT
(standard deviation 2.51 sec). This gives a hint, that
even with optimized matrix-matrix multiplication it
makes sense to use special search methods. It is pos-
sible that parallel linear search would have been faster
when search would have been done on more search
vectors at once, but in most applications one cannot
expect to have all search vectors available from the
beginning. A real time object recognition system can-
not know the search vectors of future images, and
the matrix size up to which parallel matrix-matrix-
multiplication gives a speedup will highly likely de-
pend on the cache size of the CPU, too.
6 CONCLUSIONS
We have presented the first search scheme that is
able to do fast nearest neighbor search on a set of
FAST NEAREST NEIGHBOR SEARCH IN PSEUDOSEMIMETRIC SPACES
673

vectors with different dimensionality that are com-
parable with each other but do not share a common
vector space. The method is (at least in a serial
search scheme) considerable faster than exhaustive
search and applicable as long as a similarity function
can be derived or in (spaces consisting of) Euclidean
(sub)spaces. The automatic parameter determination
(for hash vectors) takes some time but has to be run
only once for a database.
REFERENCES
Bentley, J. L. (1975). Multidimensional binary search
trees used for associative searching. Commun. ACM,
18:509–517.
BOOST (2011). UBLAS basic linear algebra library.
Datar, M., Immorlica, N., Indyk, P., and Mirrokni, V. S.
(2004). Locality-sensitive hashing scheme based on
p-stable distributions. In Proc. SCG ’04, pages 253–
262, ACM.
Dong, W. (2011). LSHKIT: A C++ locality sensitive hash-
ing library. http://lshkit.sourceforge.net/index.html.
Giacinto, G. (2007). A nearest-neighbor approach to rele-
vance feedback in content based image retrieval. In
Proc. CIVR ’07, pages 456–463, ACM.
INTEL (2011). Intel math kernel library. http://software.
intel.com/en-us/intel-mkl/.
Lades, M., Vorbr¨uggen, J. C., Buhmann, J., Lange, J.,
von der Malsburg, C., W¨urtz, R. P., and Konen, W.
(1993). Distortion invariant object recognition in
the dynamic link architecture. IEEE Trans. Comp.,
42(3):300–311.
Lv, Q., Josephson, W., Wang, Z., Charikar, M., and Li, K.
(2007). Multi-probe lsh: efficient indexing for high-
dimensional similarity search. In Proc. VLDB ’07,
pages 950–961. VLDB Endowment.
Sankar K., P., Jawahar, C. V., and Manmatha, R. (2010).
Nearest neighbor based collection OCR. In Proc. DAS
’10, pages 207–214, New York, NY, USA. ACM.
Westphal, G. and W¨urtz, R. P. (2009). Combining feature-
and correspondence-based methods for visual object
recognition. Neural Computation, 21(7):1952–1989.
W¨urtz, R. P. (1997). Object recognition robust under trans-
lations, deformations and changes in background.
IEEE Trans. PAMI, 19(7):769–775.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
674
