
A MIDDLEWARE ARCHITECTURE FOR DYNAMIC
RECONFIGURATION OF AGENT SERVICE SPACE IN IN-DOOR
LOCATION-AWARE SYSTEM
Tae-Hyon Kim, Hyeong-Gon Jo, Seol-Young Jeong and Soon-Ju Kang
College of IT, Kyungpook National University, 1370 Sankyuk-dong, Buk-gu, 702-701, Daegu, Korea
Keywords: Service Coverage Reconfigurable Middleware, Service Agents based Decentralized Architecture,
Middleware for Ubiquitous Service.
Abstract: Recently, various ubiquitous services interacting with the surrounding physical environment have been
attempted using wireless sensor network (WSN). However, these services have still remained in a
centralized service architecture in which it is difficult to support real-time response for a large number of
mobile sensor nodes. To address this problem, this paper proposes a dynamic reconfigurable agent space
(DRAS), which is a dynamically reconfigurable middleware of service agents. The DRAS is designed for
indoor WSN which is collaborating with stationary nodes and mobile nodes simultaneously. In the DRAS,
service agents can dynamically expand and contract their service areas according to the location of service
consumers. To demonstrate the feasibility and performance of the DRAS middleware, the voting service
which is an archetypical service was implemented under the DRAS. The results show that the proposed
architecture can support fast response for a large number of mobile nodes by effective network traffic
distribution and appropriate service processing.
1 INTRODUCTION
Recently, wireless sensor network technology has
enabled complex associations between humans and
physical objects or between physical and virtual
environments. Interaction with the surrounding
physical environment and personalized services are
increasingly in demand for ubiquitous applications
such as mobile asset management (Bardram, 2004)
or audience response systems (Lu et al., 2010).
However, these services are still implemented today
in client/server-based centralized architectures,
which have difficulty in supporting services
requiring real-time response over a large number of
mobile nodes. The reason for this is that messages
generated in these services need to be delivered to
the centralized server using multi-hop
communication, and therefore traffic bottlenecks
arise on the paths to the server.
To solve these problems, this paper proposes a
dynamic reconfigurable agent space (DRAS), which
is a special middleware architecture based on service
agents that can be distributed over the service area.
The service agents can dynamically expand and
contract their service areas according to the location
of service consumers. This approach guarantees
better service performance with a large number of
mobile nodes by effective distribution of network
traffic and service processing around the service
area.
The main contributions of this paper are as
follows:
• We designed and implemented a reconfigurable
service agent based middleware. Service agents can
be dynamically distributed over the service area
according to the request of the service consumers.
• We evaluated the performance of the middleware.
We measured the service expansion and the
contraction time. Also we evaluated the elapsed time
of the voting service in the simulation and the real
environment.
The contents of this paper are organized as follows.
Section 2 examines the domain description and
related research. Section 3 describes the conceptual
design of the DRAS, and Section 4 describes the
implementation of the DRAS. Section 5 presents the
testbed and performance evaluation. Finally, Section
6 summarizes with conclusions.
249
Kim T., Jo H., Jeong S. and Kang S..
A MIDDLEWARE ARCHITECTURE FOR DYNAMIC RECONFIGURATION OF AGENT SERVICE SPACE IN IN-DOOR LOCATION-AWARE SYSTEM.
DOI: 10.5220/0003813002490253
In Proceedings of the 2nd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2012), pages 249-253
ISBN: 978-989-8565-00-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 DOMAIN DESCRIPTION AND
RELATED RESEARCH
2.1 Domain Description: A Case Study
of U-hospital
Figure 1 shows opportunistic location-based services
under dynamic changes of service area in a hospital
environment. In this environment, the following
assumptions have been made. First, the whole
environment can be divided into small spaces like
rooms or floors. Such a space is called a unit space
and is the basic unit for location awareness. Second,
communication devices are divided into stationary
nodes and mobile nodes according to their
functionality and features. Mobile nodes can be
attached to people or medical devices in the form of
small tags. A stationary node can be installed in the
ceiling or walls in every unit space to provide
location reference functionality and a
communication access point for mobile nodes.
In this environment, a location-based distributed
architecture is more suitable than a traditional
centralized one. A centralized architecture has
difficulty in supporting services that require real-
time response with a large number of sensor nodes.
The reason for this is that messages generated in the
services need to be delivered to the server using
multi-hop communication, and therefore bottlenecks
arise on the paths to the server.
In this environment, requests of particular
services should be processed by the agent which is
in the same location with the service customers
(mobile nodes). In figure 1, the tracking service for
the wheelchair (mobile node m9) is processed, not
by the central server, but by the agents in the S9 and
S3 stationary nodes. Due to the location-based
distributed agent architecture (based on the location
of each mobile node), fast response can be provided
despite the large number of mobile nodes. To
implement a location-based distributed agent
architecture, one possible solution is to have all
service agents statically running in all stationary
nodes, but this approach is too inefficient to
implement. To solve this problem, a location-based
reconfiguration architecture was used for the service
agents. As shown in figure 1, if necessary, any
stationary node can activate any service agent and
expand its service area by creating a clone agent
(meaning a new instance of the same service agent)
to handle location-based service request from mobile
nodes. By this, all mobile nodes can freely move
anywhere without restriction. Of course, if the
mobile nodes’ locations are reduced, then the service
area also shrinks.
Figure 1: Dynamic changes of service area in a U-hospital.
2.2 Related Research
Recently, opportunistic computing or opportunistic
networking has become an important concept in the
service computing area, driven by the rapid growth
of mobile computing and ad hoc networks. The main
concept of opportunistic computing, that “when two
devices come into contact, it provides a great
opportunity to match services to resources, exchange
information, cyberforage, execute tasks remotely,
and forward messages” (Conti and Kumar, 2010), is
highly suitable for location-based services and social
network service applications because
communication and computing are processed by
means of social relationship and collaboration
among communication nodes. In this paper, based
on the concepts just described, a middleware
architecture is proposed which can create
communication opportunities and provide exchange
services between stationary nodes and mobile nodes
which approach each other.
There are many researches related agent based
middleware in WSN environment. TeenyLIME
(Costa et al., 2006) is a tuplespace-based application
middleware which is designed for a WSN
environment without base station. TeenyLIME is an
extension of LIME. In this paper, a new tuplespace
implementation which can provide event-driven
asynchronous read/write on top of TinyOS has been
provided. Agilla (Fok et al., 2009) is a mobile-agent-
based service middleware for a WSN environment.
In this middleware, an agent can be moved or copied
among mobile nodes without losing its internal
contexts. Communications among agents is
accomplished by the abstract functions of a
tuplespace and an internal neighbor list. However,
these studies are also based on multi-hop
communications and need to deal with complex
calculations on the mobile-node side, and therefore
it is difficult to adapt their proposals to provide the
services needed for real-time response with a large
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
250
number of mobile nodes and also for network
stability.
3 CONCEPTUAL DESIGN OF
THE PROPOSED
ARCHITECTURE
In the DRAS, a service is provided by service agents
which are distributed to stationary nodes in the form
of processes and connected to each other by P2P
connections. Unlike a server-based centralized
architecture, network traffic and service processing
are distributed naturally to the multiple stationary
nodes. Collaborations with the service agents are a
key consideration in the DRAS.
The proposed service architecture uses only one-
hop ad hoc communication to communicate between
stationary nodes and mobile nodes because of the
desire to minimize network congestion and delay
problems. To send a message to another mobile node,
a mobile node first sends a message to a stationary
node. Then the stationary node finds a destination
stationary node close to where the destination
mobile node is located and sends the message to this
stationary node. Finally, the stationary node sends
the message to the target mobile node.
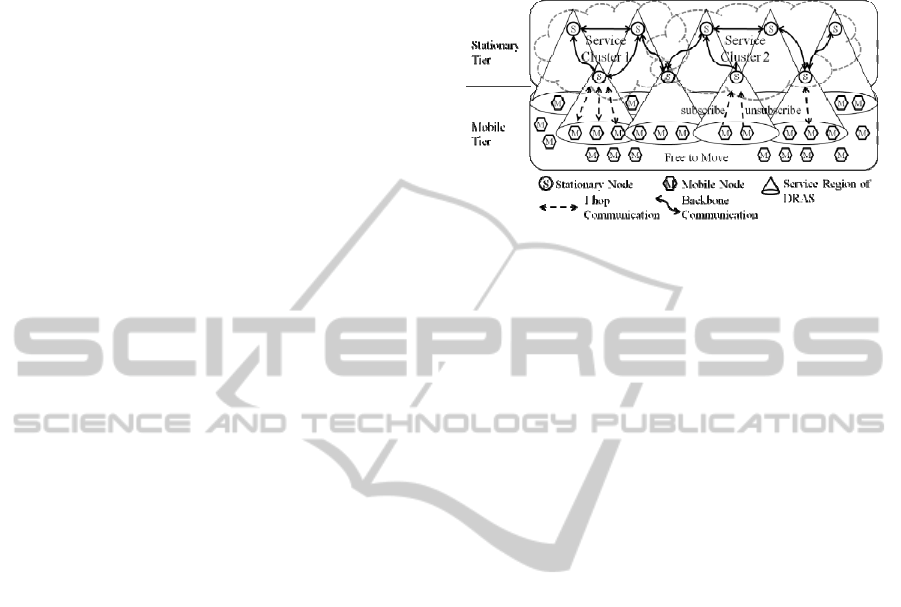
Figure 2 shows the proposed network
architecture of the DRAS, which is composed of two
tiers. The stationary tier is composed of stationary
nodes which manage unit spaces, and the backbone
network which connects the stationary nodes. The
mobile tier is composed of mobile nodes which can
be attached to objects or be used for service users,
and the one-hop ad hoc network. Communication
among stationary nodes is performed in a P2P mode
rather than in a traditional server-client mode. A
service request coming from a mobile node can be
handled by a service agent running in a stationary
node. Otherwise, it will be served by collaboration
among agents distributed in several stationary nodes
(drawn as a service cluster in Figure 2).
To communicate between stationary and mobile
nodes, this study used the LIDx/LAMD one-hop ad
hoc protocol, which was proposed in a previous
study (Kim et al., 2011). LIDx is an abbreviation of
“Location-ID Exchange protocol,” which is used for
location awareness between stationary and mobile
nodes. LAMD is an abbreviation of “LIDx-based
Asynchronous Message Delivery,” which is used for
exchanging asynchronous messages among mobile
nodes. In this paper, LIDx and LAMD are used as
the one-hop-based location determination and
message delivery protocols between mobile nodes
and stationary nodes to implement the proposed
DRAS architecture.
Figure 2: Two-tier service architecture in the DRAS.
A service can dynamically modify its service
coverage by changing service agents. Each of the
service agents is managed by a process in the DRAS.
A service agent can exist in one of the following
states: creation, expansion, processing, contraction,
and destruction.
4 IMPLEMENTATION OF THE
DRAS
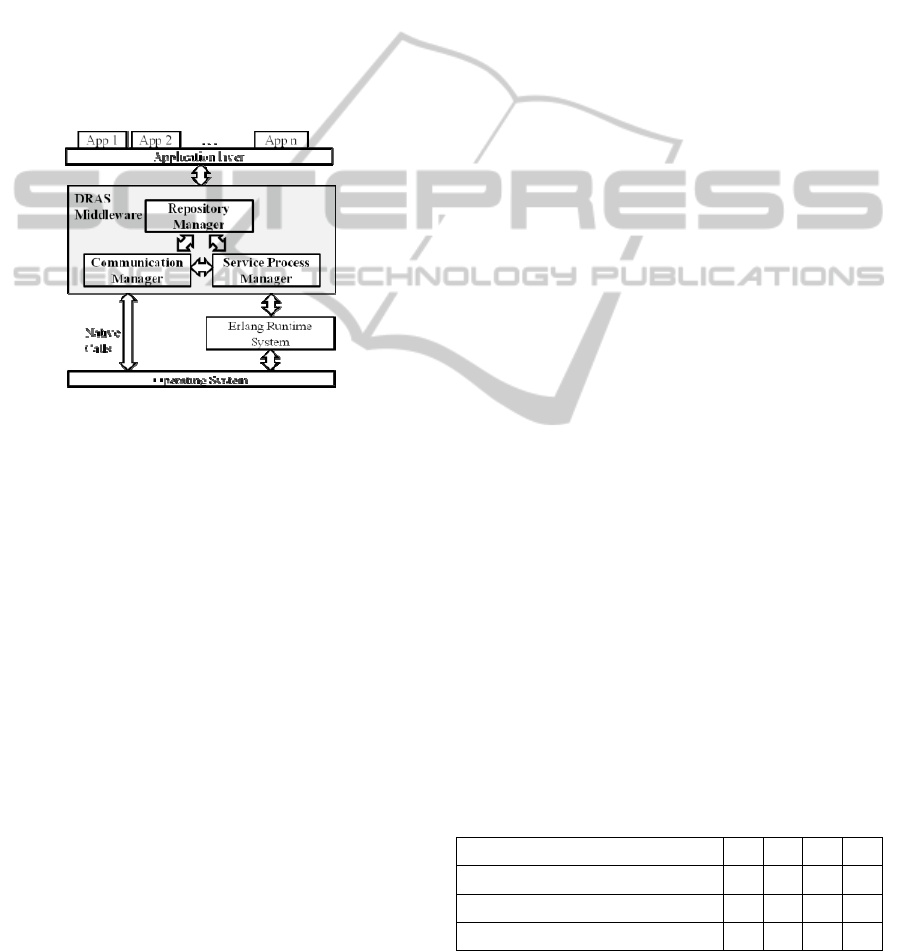
Figure 3 describes the DRAS software block for the
stationary nodes. The proposed middleware which
manages the DRAS services can be divided into
three components: the service process manager, the
repository manager, and the communication
manager. The service process manager takes charge
of the lifecycles of service agents. The repository
manager handles service contexts, including location
of mobile nodes and environmental data. The
communication manager deals with communication
between stationary and mobile nodes. Each of these
components contains several processes such as
message loops, worker processes, controllers, and
others. Message passing is the only way to
communicate among processes in this middleware
architecture. This means that communication
transparency between local and remote processes
can be provided throughout the services and that the
influence on other processes of the sudden failure of
one process can be minimized, even though the
response time of the services would be increased by
message-handling overhead.
This middleware has been implemented with
C++ and Erlang (Armstrong, 2003). Erlang is a
programming language that supports fast process
creation, control of large numbers of processes, and
fast communication among processes for distributed
A MIDDLEWARE ARCHITECTURE FOR DYNAMIC RECONFIGURATION OF AGENT SERVICE SPACE IN
IN-DOOR LOCATION-AWARE SYSTEM
251
systems. However, hardware control is very limited.
Therefore, the service process manager and the
repository manager have been implemented in
Erlang because they need to control and
communicate with many processes. The
communication manager has been implemented
mainly in C++, but partly in Erlang, because it
controls multiple communication protocols for
mobile nodes, including hardware access. All
messages based on mobile-node communication
protocols will be converted to TCP/IP-based
messages in the communication manager, and
TCP/IP-based messages will be converted before
transmission to a mobile protocol depending on the
target mobile node.
Figure 3: A block diagram of the DRAS middleware.
5 TESTBED AND
PERFORMANCE EVALUATION
To verify the proposed DRAS middleware and
evaluate its performance, a test-bed was set up
consisting of five stationary nodes, one PC, and one
Ethernet hub. In order to evaluate the performances
of the middleware on a large number of mobile
nodes, a simulation program was also developed. It
can simulate the behavior of mobile nodes, including
communication based on LIDx and LAMD (except
retry and delay), location movement, and service
processing. In the simulation, each Erlang process
will simulate the behavior of mobile nodes.
Generated messages are routed directly to the
stationary node, which is regarded as the current
location of the mobile node. Even though TCP/IP
rather than the one-hop ad hoc protocol was used for
communication between a stationary node and a
mobile node, this experiment was intended to
evaluate the performance of the services and the
middleware itself, which is not limited by the
communication medium. In a real environment, the
performance could be highly influenced by the
limitations of WSN protocols such as traffic
congestion or long delay problems. The stationary
node is consists of an Arm Cortex 800-MHz A8
MCU with 512MB SDRAM and Linux 2.6.28 kernel.
The mobile node has a 8bit MCU with 8KB SRAM
and 256KB flash. The PC has an i5-520 CPU with 4
GB memory and Linux 2.6.30 kernel.
Figure 4 shows the evaluation results for the
voting service. The response time was evaluated by
varying the number of stationary nodes between one
and five and of mobile nodes between 10 and 50 in
the real environment (Fig.4(a)), between 100 and
1000 in the simulation (Fig.4(c)). The mobile nodes
were uniformly distributed over all stationary nodes.
This result indicates that the middleware handles
traffic distribution well. The decrease in response
time with increasing number of stationary nodes is
due to the distribution of traffic through multiple
stationary nodes with expansion of service coverage.
We can observe that the response time was rising
significantly when only one stationary node and
above 30 mobile nodes were used in the real
environment because the traffic of mobile nodes
flowing into a stationary node, the traffic was
beyond the communication capacity of the ad-hoc
node attached to the stationary node.
Service performance was also measured by
changes in service-processing overhead and in the
number of stationary nodes needed to distribute
service processing. The results of this experiment
are shown in Fig. 4(b) for the real environment and
in Fig. 4(d) for the simulation. To vary service-
processing overhead, a series of Fibonacci numbers
was just calculated. It takes 32ms to call a function
fib(23), 84 ms for fib(25). Similarly to the results for
traffic distribution, the performance increases by
increasing the number of stationary nodes. Due to
the retry and delay problem in the real environment,
the result between the real environment and the
simulation has differences (retry delay is 100ms in
the real environment). However we can recognize
the common tendency of the result by the changes of
the number of the stationary nodes or mobile nodes.
Table 1: The elapsed time for changing service coverage.
The Number of Stationary nodes (ea) 1->2 2->3 3->4 4->5
Expansion Time(ms) 29.4 28.0 29.5 29.0
- 5->4 4->3 3->2 2->1
Contraction Time(ms) 12.8 11.7 11.9 11.9
Table 1 shows the elapsed time for the dynamic
change of service coverage. It shows that the change
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
252
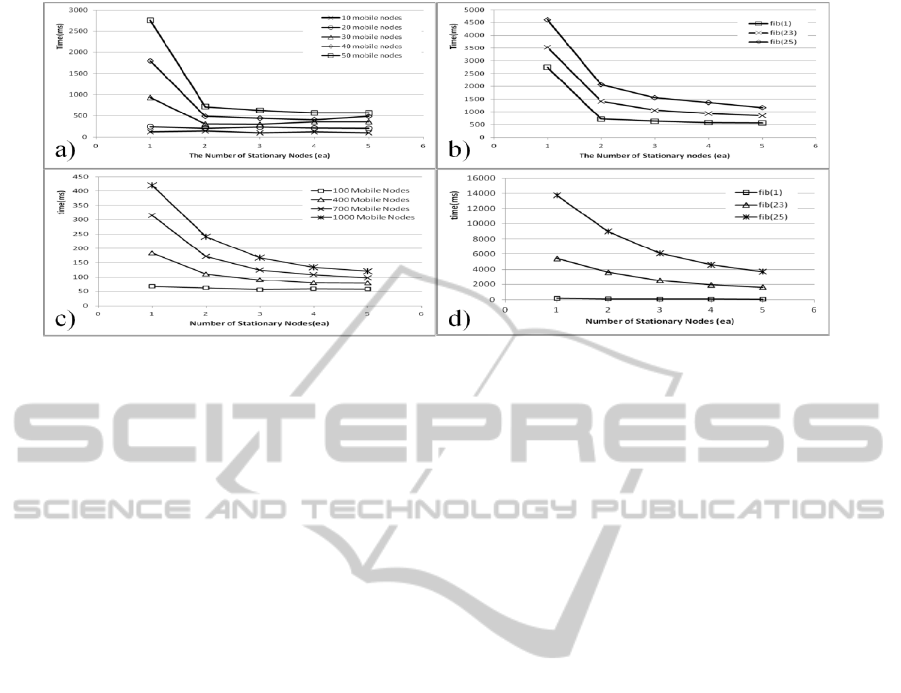
Figure 4: Test results for the voting service: a, c) Variation in response time with number of stationary and mobile nodes
(average of 10 runs); b, d) Variation in response time with processing overhead and the number of stationary nodes (with 50
mobile nodes for b, 400 mobile nodes for d, average of 10 runs). a, b) the real environment. c, d) simulation.
of service coverage takes under 30 ms for expansion
and under 13ms for contraction.
6 CONCLUSIONS
In this paper, a dynamic reconfigurable agent space
(DRAS) has been proposed, which is a special
middleware architecture based on service agents.
The agents can be distributed over an actual service
area in the form of processes in the stationary nodes
and can provide real-time response by distribution of
network traffic and service processing. The DRAS
can expand and contract the service area
dynamically by generation and destruction of service
agents in the stationary nodes around the mobile
node.
To verify the DRAS middleware and to evaluate
its performance, the voting service was implemented.
The response time was evaluated in the real
environment and in the simulation. We showed that
the traffic and the processing were well distributed
over the multiple stationary nodes.
We are developing the DRAS continuously and
applying it to self-organizing applications such as
robot swarms which need fast response and complex
collaboration among communication nodes. It can be
expected that the characteristics of the proposed
DRAS, such as effective traffic distribution and
service processing and dynamic service-coverage
reconfiguration, can be of great assistance in that
service domain.
ACKNOWLEDGEMENTS
This research was supported by Basic Science
Research Program through the National Research
Foundation of Korea(NRF) funded by the Ministry
of Education, Science and Technology(2010-
0003387)
REFERENCES
Armstrong, J., 2003. Making Reliable Distributed Systems
In The Presence Of Software Errors. Phd Thesis, The
Royal Institute Of Technology.
Bardram, J. E., 2004. Applications Of Context-Aware
Computing In Hospital Work: Examples And Design
Principles. Proceedings Of The 2004 Acm Symposium
On Applied Computing.
Conti, M. and Kumar, M., 2010. Opportunities In
Opportunistic Computing. Computer, 43, 42-50.
Costa, P., Mottola, L., Murphy, A. L. and Picco, G. P.
2006. Teenylime: Transiently Shared Tuple Space
Middleware For Wireless Sensor Networks.
Proceedings of the International Workshop on
Middleware for Sensor Networks.
Fok, C. L., Roman, G. C. and Lu, C., 2009. Agilla: A
Mobile Agent Middleware For Self-Adaptive Wireless
Sensor Networks. Acm Trans. Auton. Adapt. Syst.
Kim, T., Jeong, S., Cho, H., Kang, S. and Lee, J., 2011. A
Location-Aware Asynchronous Message Delivery For
Indoor Wireless Sensor Network Applications.
Acis/Jnu International Conference On Computers,
Networks, Systems, And Industrial Engineering.
Lu, J., Pein, R. P., Hansen, G., Nielsen, K. L. and Stav, J.
B. 2010. User Centred Mobile Aided Learning System:
Student Response System (Srs). Computer And
Information Technology (Cit).
A MIDDLEWARE ARCHITECTURE FOR DYNAMIC RECONFIGURATION OF AGENT SERVICE SPACE IN
IN-DOOR LOCATION-AWARE SYSTEM
253
