
DEPTH PERCEPTION MODEL EXPLOITING BLURRING CAUSED
BY RANDOM SMALL CAMERA MOTIONS
Norio Tagawa, Yuya Iida and Kan Okubo
Graduate School of System Design, Tokyo Metropolitan University, Hino-shi, Tokyo, Japan
Keywords:
Depth Perception, Shape from Blurring, Stochastic Resonance, Fixational Eye Movement.
Abstract:
The small vibration of the eye ball, which occurs when we fix our gaze on an object, is called “fixational eye
movement.” It has been reported that this vibration may work not only as a fundamental function to preserve
photosensitivity but also as a clue to image analysis, for example contrast enhancement and edge detection.
This mechanism can be interpreted as an instance of stochastic resonance, which is inspired by biology, more
specifically by neuron dynamics. Moreover, researches for a depth recovery method using camera motions
based on an analogy of fixational eye movement are in progress. In this study, using camera motions espe-
cially corresponding to the smallest type of fixational eye movement called “tremor.” We have constructed
the algorithms which are defined as a differential form, i.e. spatio-temporal derivatives of successive two im-
ages are analyzed. However, in these methods, observed noise of derivatives causes serious recovering error.
Therefore, we newly examine a method in which a lot of images captured with the same camera motions are
integrated and the observed local image blurring is analyzed for extracting depth information, and confirm its
effectiveness.
1 INTRODUCTION
Camera vibration noise is serious for a hand-held
camera and for many vision systems mounted on mo-
bile platforms such as planes, cars or mobile robots,
and of course for biological vision systems. The com-
puter vision researchers traditionally considered the
camera vibration as a mere nuisance and developed
variousmechanical stabilizations (Oliverand Quegan,
1998) and filtering techniques (Jazwinski, 1970) to
eliminate the jittering caused by the vibration.
In contrast, a new vision device, called the Dy-
namic Retina (DR), which directly takes advantage
of vibrating noise generated by mobile platforms to
enhance spatial contrast (Propokopowicz and Cooper,
1995). Furthermore, for edge detection, the Resonant
Retina (RR) indicating the DR model with the tech-
nique based on stochastic resonance (SR) is proposed
(Hongler et al., 2003). SR can be viewed as a noise-
induced enhancement of the response of a nonlinear
system to a weak input signal, for example bistable
devices (Gammaitoni et al., 1998) and threshold de-
tectors (Greenwood et al., 1999), and naturally ap-
pears in many neural dynamics processes (Stemmler,
1996).
Although DR and RR offer their massive paral-
lelism and the simplicity of their architecture, by con-
sidering especially the enough potential of the cam-
era vibration for depth perception, we have proposed
shape recovery methods using the camera motion
model imitating fixational eye movements (Tagawa
and Alexandrova, 2010), (Tagawa, 2010). These
methods are constructed based on a differential form,
and the gradient method for ”shape from motion”
(Horn and Schunk, 1981), (Simoncelli, 1999), (Bruhn
and Weickert, 2005) is used fundamentally in order
to recover dense depth map with low computational
cost compared with the methods based on correla-
tion matching. The fixational eye movement is clas-
sified into three types as shown in Fig. 1: microsac-
cade, drift and tremor. Here, we focus on the tremor,
which is the smallest one of the three types, to reduce
the linear approximation error of the gradient equa-
tion. However, in this case, we cannot get enough
information to recover accurate depth from succes-
sive two images. Therefore, we have to collect the
enough information about depth from other sources.
Using a lot of images captured with random small
motions of camera, which consists of 3-D rotations
imitating fixational eye ball motions (Martinez-Conde
et al., 2004), many observations can be used at each
pixel, i.e. many gradient equations can be used to re-
cover the each depth value corresponding to the each
pixel. It should be noted that since the center of the
329
Tagawa N., Iida Y. and Okubo K..
DEPTH PERCEPTION MODEL EXPLOITING BLURRING CAUSED BY RANDOM SMALL CAMERA MOTIONS.
DOI: 10.5220/0003817403290334
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 329-334
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
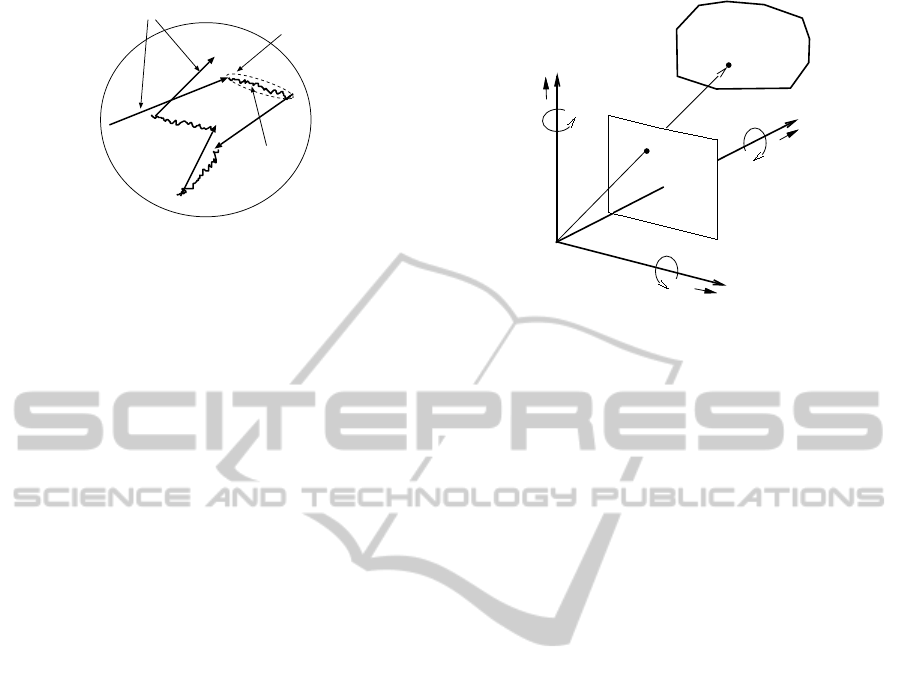
microsaccade
drift
tremor
Figure 1: Illustration of fixational eye movement including
microsaccade, drift and tremor.
abovementioned3-D rotations and the lens center dif-
fer, the translational motions with respect to the lens
center are caused implicitly, and hence, depth infor-
mation can be observed in these images. Through
the simulations using artificial images, if the obser-
vation noise is an actual sample of the noise model
theoretically defined, the proposed methods work ef-
fectively. However, if the size of principal intensity
patterns are small as compared with the size of im-
age motions, aliasing occures and hence, the gradient
equation becomes useless. This means that the meth-
ods in (Tagawa and Alexandrova, 2010) and (Tagawa,
2010) cannot be applied.
In this study, in order to avoid the problem men-
tioned above, we propose a new scheme based on an
integral form using also the analogy of the fixational
eye movement. When a lot of images generated by
the same way described above are summed up, one
blurred image can be obtained. The degree of the
blurring is a function of the pixel position, and it also
depends on depth value at each pixel. This means that
the difference of the degree of burring in image indi-
cates the depth information. By the proposed scheme,
at first, using the blurred image detected by summing
up all images and the first image with no blurring, spa-
tial distribution of burring in the summed up image is
effectively estimated. By modeling the small 3-D ro-
tations of camera as Gaussian random variables, from
this burring distribution the depth map can be com-
puted analytically.
2 CAMERA MOTION BLURRING
2.1 Camera Motion Imitating Tremor
As shown in Fig. 2, we use perspective projection as
our camera-imaging model. A camera is fixed with
an (X,Y,Z) coordinate system, where the viewpoint,
i.e., lens center, is at origin O and the optical axis is
along the Z-axis. A projection plane, i.e. an image
X
Y
Z
u
x
u
y
u
z
(x,y)
(X,Y,Z)
r
x
r
y
r
z
O
Image Plane
Object
Figure 2: Projection model.
plane, Z = 1 can be used without any loss of general-
ity, which means that focal length equals 1. A space
point (X,Y,Z) on an object is projected to an image
point (x,y).
We introduce a motion model representing fixa-
tional eye movement. We can set a camera’s rotation
center at the back of lens center with Z
0
, which is con-
stant and known, along optical axis. Rotations around
all axes parallel with X, Y and Z axis, respectively,
are considered as a rotation of eye ball. We represent
this rotational vector as r = [r
x
,r
y
,r
z
]
⊤
, and it can be
used also for the representation of the rotational vec-
tor at origin O shown in Fig. 2. On the other hand, the
translational vector u = [u
x
,u
y
,u
z
]
⊤
in Fig. 2 is caused
by the above eye ball’s rotation, and is formulated as
follows:
u = r ×
0
0
Z
0
= Z
0
r
y
−r
x
0
. (1)
From this equation, it can be known that r
z
causes
no translation. Therefore, we set r
z
= 0 and redefine
r ≡ [r
x
,r
y
]
⊤
as a rotation vector of eyeball. Using
Eq. 1 and the inverse depth d(x,y) = 1/Z(x,y), im-
age motion called “optical flow” v = [v
x
,v
y
]
⊤
is given
as follows:
v
x
= xyr
x
−(1+ x
2
)r
y
−Z
0
r
y
d, (2)
v
y
= (1+ y
2
)r
x
−xyr
y
+ Z
0
r
x
d. (3)
In the above equations, d is an unknown variable at
each pixel, and u and r are unknown common param-
eters for the whole image. This camera model is easy
of control, since the degree of freedom for motion is
low. Additionally, absolute depth values can be deter-
mined by this model with known value Z
0
.
We use M as the number of frames used for depth
recovery, and in this study, {r
( j)
}
j=1,···,M
is treated as
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
330

a stochastic variable. We ignore the temporal correla-
tion of tremor which is needed to form drift compo-
nent, and we assume that r
( j)
is a 2-dimensionalGaus-
sian random variable with a mean 0 and a variance-
covariance matrix σ
2
r
I, where I indicates a 2 ×2 unit
matrix.
p(r
( j)
|σ
2
r
) =
1
(
√
2πσ
r
)
2
exp
(
−
r
( j)⊤
r
( j)
2σ
2
r
)
, (4)
where σ
2
r
is assumed to be known.
From Eqs. 2 and 3, and the probabilistic char-
acteristics of r
( j)
, v is also a 2-dimensional Gaus-
sian random variable with E[v] = 0 and the variance-
covariance matrix of
V [v] =
"
x
2
y
2
+ (1+ x
2
+ Z
0
d)
2
2xy(1+
x
2
+y
2
2
+ Z
0
d)
2xy(1+
x
2
+y
2
2
+ Z
0
d) x
2
y
2
+ (1+ y
2
+ Z
0
d)
2
#
σ
2
r
.
(5)
If we can know the variance-covariance matrices de-
pending on image position, depth map can be calcu-
lated.
2.2 Image Blurring Related to Depth
There are some schemes to obtain the variance-
covariance matrix of optical flow defined by Eq. 5
locally at each image position from multiple images
observed through random camera rotations imitating
tremor. The most simple and natural way is statisti-
cally computing the matrix as an arithmetic average
of quadratic value of optical flows, which is firstly
detected from images. However, in this study, we
suppose that intensity patterns are fine with respect
to a temporal sampling rate, and hence optical flow is
hard to be detected accurately. Therefore, we employ
an integral formed scheme, in which the variance-
covariance matrices are computed as a distribution of
local image blurring.
We define an averaged image f
ave
(x) as an arith-
metic average of observed M images {f
j
(x)}
j=1,···,M
with fixational eye movements. If M is asymptoti-
cally large, the following equation holds using locally
defined a 2-dimensional Gaussian point spread func-
tions g
x
(·) and an original image f
0
(x).
f
ave
(x) =
Z
x
′
∈R
g
x
(x
′
) f
0
(x−x
′
)dx
′
, (6)
where x indicates the image position, R is a local re-
gion around x, and g
x
(·) has a vairance-covaiancema-
trix in Eq. 5. Additionally,
R
g
x
(x
′
)dx
′
= 1 is satisfied.
As the above discussion, we model f
ave
(x) as an
image blurred by fixational eye movements. The dis-
tribution of blurring degree in f
ave
(x) represents the
spatial distribution of depth.
3 DEPTH PERCEPTION
3.1 Blurring Detection Algorithm
We detect the blurring distribution in an image do-
main not in a frequency domain. The processing
schemes can be classified into an one-step scheme and
a multi-step scheme. In the one-step scheme, the un-
known value set {d
i
}
i=1,···,N
(N indicates the number
of pixels in image) is determined with keeping the
whole constraints for them. At all pixels in image,
the point spread functions {g
x
(·)}, each of which has
a Gaussian form and has the variance-covariance ma-
trix formulated by Eq. 5, have to be determined simul-
taneously, and as a result, {d
i
} is optimally obtained.
On the other hand, in the multi-step scheme, firstly
at the each pixel, the variance-covariance matrix of
the Gaussian distribution is detected with no use of
the constraint in Eq. 5. After that, {d
i
} is determined
from the variance-covariance matrices using the con-
straint in Eq. 5. In this study, in order to confirm the
possibility of our integral formed scheme, we employ
the latter scheme. Additionally, the Gaussian con-
straints are relaxed, and the variance-covariance ma-
trix is estimated as simple statistics. In the following,
the concrete algorithm is explained.
We use the original image, i.e. the first image
f
0
(x), and the arithmetic average f
ave
(x) to determine
the image blurring, and the each f
j
(x) ( j 6= 0) is not
used explicitly to save capacity of memory. At first,
the Gaussian property is ignored and hence, w
x
(·) is
used as a point spread function instead of g
x
(·). The
local support of w
x
(x) is defined as a square discrete
region with P×P pixels, and using a dictionary order,
P
2
-dimensional vector w
i
is introduced as a discrete
representation of w
x
(·), where “i” indicates a pixel
index. Additionally, discrete representations of local
image intensity of f
0
(x) and f
ave
(x) are defined as f
i
0
and f
i
ave
, which are also P
2
-dimensional vectors con-
sist of local intensity values around the pixel i. Using
f
i
0
, P
2
×P
2
matrix F
i
is defined as follows:
F
i
=
h
f
i+1
0
f
i+2
0
··· f
i+P
2
0
i
. (7)
By ignoring the constraint generally holding for the
components of the point spread function {w
i(k)
}
k
of
blurring,
∑
k
w
i(k)
= 1, an objective function for each
pixel i can be defined as follows:
J
i
(w
i
) =
F
i
⊤
w
i
− f
i
ave
⊤
F
i
⊤
w
i
− f
i
ave
. (8)
By differentiating J
i
(w
i
) with respect to w
i
, the fol-
lowing solution can be derived.
ˆw
i
=
F
i
F
i
⊤
−1
F
i
f
i
ave
. (9)
DEPTH PERCEPTION MODEL EXPLOITING BLURRING CAUSED BY RANDOM SMALL CAMERA MOTIONS
331

Subsequently, the components of the variance-
covariance matrix V
i
theoretically corresponding to
the variance-covariance matrix of the optical flow de-
fined in Eq. 5 have to be estimated. The each compo-
nent can be simply estimated as follows:
ˆ
V
i(1,1)
=
P
2
∑
k=1
x(k)
2
ˆw
i(k)
, (10)
ˆ
V
i(1,2)
= V
i(2,1)
=
P
2
∑
k=1
x(k)y(k) ˆw
i(k)
, (11)
ˆ
V
i(2,2)
=
P
2
∑
k=1
y(k)
2
ˆw
i(k)
, (12)
where (x(k),y(k)) means the 2-dimensional coordi-
nate values corresponding to k with the center of the
local support as (0,0).
3.2 Depth Perception Algorithm
From Eq. 5 and the estimates computed by Eqs. 10,
11 and 12, equations with respect to the each d
i
can
be derived as follows:
1+ x
2
i
+ Z
0
d
i
=
s
ˆ
V
i(1,1)
σ
2
r
−x
2
i
y
2
i
≡ α
i
, (13)
1+
x
2
i
+ y
2
i
2
+ Z
0
d
i
=
ˆ
V
i(1,2)
2x
i
y
i
σ
2
r
≡ β
i
, (14)
1+ y
2
i
+ Z
0
d
i
=
s
ˆ
V
i(2,2)
σ
2
r
−x
2
i
y
2
i
≡ γ
i
. (15)
Using the mean square criterion, estimate of d
i
is
determined as
ˆ
d
i
=
1
Z
0
w
α
α
i
+ w
β
β
i
+ w
γ
γ
i
−(w
α
+
w
β
2
)x
2
i
−(w
γ
+
w
β
2
)y
2
i
−1
, (16)
where w
α
, w
β
and w
γ
are the weight respectively cor-
responding to the each of Eqs. 13, 14 and 15 and
w
α
+ w
β
+ w
γ
= 1 holds. Especially, if w
α
= w
β
=
w
γ
= 1/3, Eq. 16 becomes
ˆ
d
i
=
1
Z
0
α
i
+ β
i
+ γ
i
3
−
x
2
i
+ y
2
i
2
−1
. (17)
By expanding the right-hand side of Eq. 13
as the Taylor series and extracting the first or-
der term, error component can be formulated as
δV
i(1,1)
/(2
q
V
i(1,1)
σ
2
r
−x
2
i
y
2
i
σ
4
r
), in which δV
i(1,1)
is
the detection error in Eq. 10. In the same way, er-
ror in Eq. 14 is δV
i(1,2)
/(2x
i
y
i
σ
2
r
), and error in Eq. 15
(a)
(b)
0
10
20
30
40
50
60
70
0
10
20
30
40
50
60
70
5
6
7
8
9
10
Z
x
y
Z
Figure 3: Example of the data used in the experiments: (a)
artificial image; (b) true depth map.
is δV
i(2,2)
/(2
q
V
i(2,2)
σ
2
r
−x
2
i
y
2
i
σ
4
r
). If it is assumed
that δV
i(1,1)
, δV
i(1,2)
and δV
i(2,2)
are the Gaussian ran-
dom variables with the same variance, the following
weight can be used to determine d
i
as the maximum
likelihood estimator.
w
α
=
V
i(1,1)
−x
2
i
y
2
i
σ
2
r
V
i(1,1)
+V
i(2,2)
−x
2
i
y
2
i
σ
2
r
, (18)
w
β
=
x
2
i
y
2
i
σ
2
r
V
i(1,1)
+V
i(2,2)
−x
2
i
y
2
i
σ
2
r
, (19)
w
γ
=
V
i(2,2)
−x
2
i
y
2
i
σ
2
r
V
i(1,1)
+V
i(2,2)
−x
2
i
y
2
i
σ
2
r
. (20)
4 NUMERICAL EVALUATIONS
To confirm the feasibility of the proposed scheme, we
conducted numerical evaluations using artificial im-
ages. Figure 3(a) shows the original image gener-
ated by a computer graphics technique using the depth
map shown in Fig. 3(b). The image size assumed in
these evaluations is 256 ×256 pixels, which corre-
sponds to −0.5 ≤x,y ≤0.5 measured using the focal
length as a unit. In Fig. 3(b), the vertical axis indi-
cates the depth Z using the focal length as a unit, and
the horizontal axes mean x and y in the image, which
is marked every four pixels.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
332
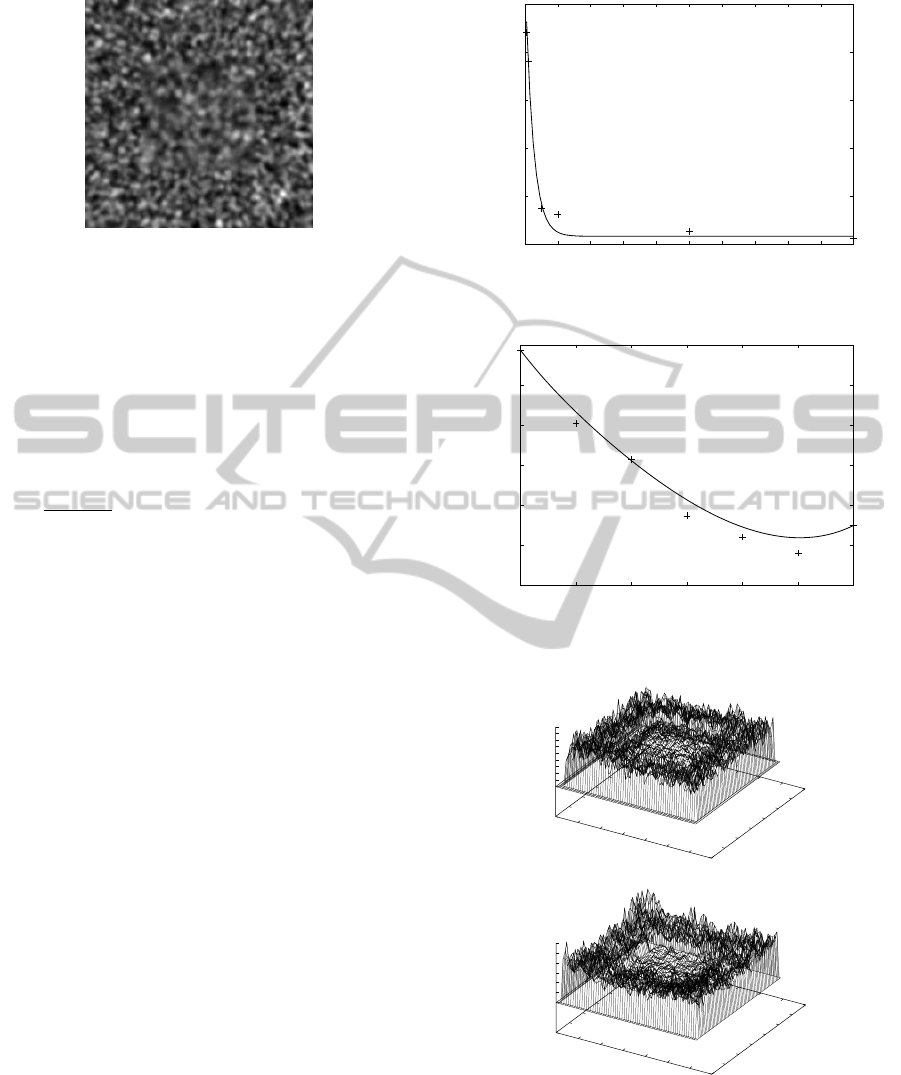
Figure 4: Averaged image with 100 images.
In the evaluations, we generated the successive
images from the original image shown in Fig. 3(a) by
randomly sampling r
( j)
as a Gaussian random vari-
able. By varying the number of the images used for
averaging and the deviation of r
( j)
, the depth recov-
ery error was evaluated. Figure 4 shows the averaged
image f
ave
(x) with 100 images. The value of P by
which the local region size for estimating V[v] is de-
fined is adjusted according to the maximum value of
the theoretical V[v] evaluated by Eq. 5, i.e. P is set as
P =
p
maxV[v] ×6. The evaluated characteristics of
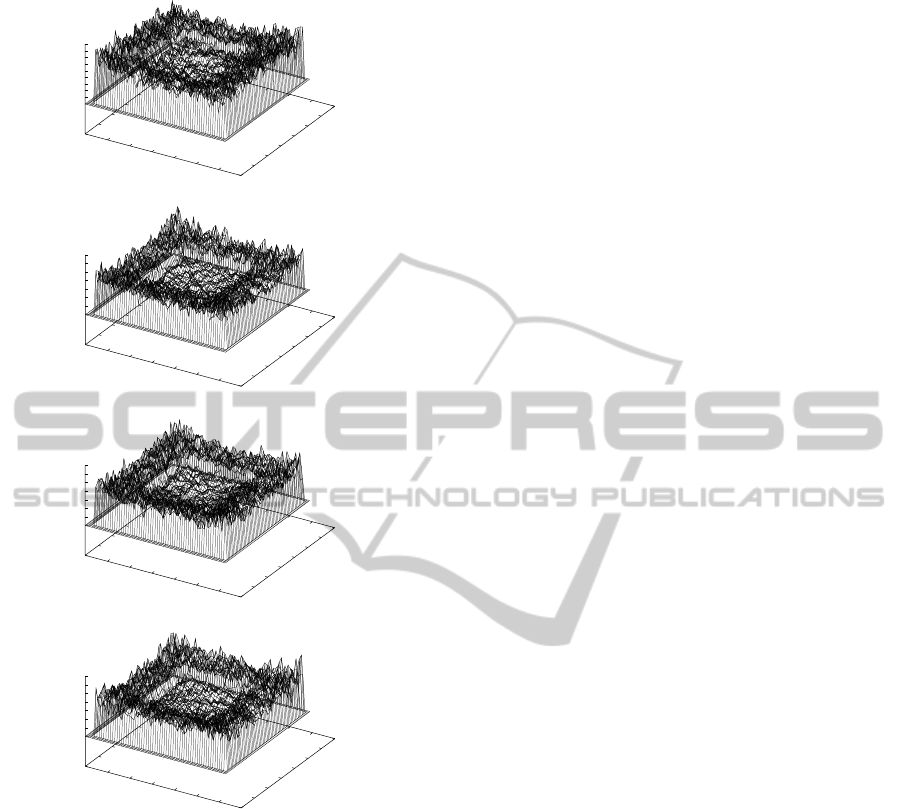
the recovery error are shown in Figs. 5 and 6. Exam-
ples of the depth recovery results are shown in Figs. 7
and 8. In these evaluations, Eqs. 16 with the weights
defined by Eqs. 18, 19 and 20 are employed. These
weights are defined using the true values of V
i
, which
can not be known in the actual situation, hence we use
the estimated values computed by Eqs. 10, 11 and 12
instead of the true values. Note that Eq. 17 is very
poor for a good recovery in this study.
From Figs. 7 and 8, we can confirm that the outline
of the recovered depth resembles the theoretical one,
but there are a lot of noisy patterns. By increasing
the number of images summed up, the depth recovery
error becomes small, and hence, the noisy patterns in
the estimated V[v] become small a little. On the other
hand, when the motion size is too large, the recovery
error can not become smaller. This means that us-
ing the large motion, the discontinuous regions of the
shape may be recovered as the hardly smooth one.
5 CONCLUSIONS
In this study, we propose a new scheme to recover
a depth map using the camera model imitating fixa-
tional eye movements, especially tremor component.
Our scheme is based on the integral form and the im-
age blurring is mainly used to recover depth, although
we have proposed some differential-formed methods.
We explained the theoretical principle of our scheme
and proposed the simple method to estimate image
1.25
1.3
1.35
1.4
1.45
1.5
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
RMSEs
Frames
Figure 5: Characteristics of depth recovery error with re-
spect to the number of images.
1.2
1.4
1.6
1.8
2
2.2
2.4
0.001 0.002 0.003 0.004 0.005 0.006 0.007
RMSEs
Deviation of r vector
Figure 6: Characteristics of depth recovery error with re-
spect to the deviation of r
( j)
.
(a)
0
10
20
30
40
50
60
70
0
10
20
30
40
50
60
70
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Z
x
y
Z
(b)
0
10
20
30
40
50
60
70
0
10
20
30
40
50
60
70
0
0.5
1
1.5
2
2.5
3
Z
x
y
Z
Figure 7: Depth recovery results obtained by varying σ
r
with M = 100: (a) σ
r
= 0.001 and P = 3; (b) σ
r
= 0.003
and P = 5.
blurring using the original image and the averaged
image. In this method, by simplifying the problem,
we ignore the constraints for the blurring of this prob-
DEPTH PERCEPTION MODEL EXPLOITING BLURRING CAUSED BY RANDOM SMALL CAMERA MOTIONS
333
(a)
0
10
20
30
40
50
60
70
0
10
20
30
40
50
60
70
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
Z
x
y
Z
(b)
0
10
20
30
40
50
60
70
0
10
20
30
40
50
60
70
0
1
2
3
4
5
6
7
Z
x
y
Z
(c)
0
10
20
30
40
50
60
70
0
10
20
30
40
50
60
70
0
1
2
3
4
5
6
7
Z
x
y
Z
(d)
0
10
20
30
40
50
60
70
0
10
20
30
40
50
60
70
0
1
2
3
4
5
6
7
Z
x
y
Z
Figure 8: Depth recovery results obtained by varying the
number of images with σ
r
= 0.005 [rad./frame] and P = 9:
(a) M = 100; (b) M = 500; (c) M = 1000; (d) M = 10000.
lem, which should be used to recover accurate depth
map, and hence, we tried to confirm only the feasi-
bility of the proposed integral-formed scheme. From
the results of the numerical evaluations using artifi-
cial images, we can know that the proposed scheme
can get the depth information. In future, we have to
construct the optimal detection method of image blur-
ring caused by the fixational eye movements.
REFERENCES
Bruhn, A. and Weickert, J. (2005). Locas/kanade meets
horn/schunk: combining local and global optic flow
methods. Int. J. Comput. Vision, 61(3):211–231.
Gammaitoni, L., Hanggi, P., Jung, P., and Marchesoni, F.
(1998). Stochastic resonance. Rev. Modern Physics,
70(1):223–252.
Greenwood, P., Ward, L., and Wefelmeyer, W. (1999). Sta-
tistical analysis of stochastic resonance in a simple
setting. Physical Rev. E, 60:4687–4696.
Hongler, M.-O., de Meneses, Y. L., Beyeler, A., and Jacot,
J. (2003). The resonant retina: exploiting vibration
noise to optimally detect edges in an image. IEEE
Trans. Pattern Anal. Machine Intell., 25(9):1051–
1062.
Horn, B. K. P. and Schunk, B. (1981). Determining optical
flow. Artif. Intell., 17:185–203.
Jazwinski, A. (1970). Stochastic processes and filtering the-
ory. Academic Press.
Martinez-Conde, S., Macknik, S. L., and Hubel, D. (2004).
The role of fixational eye movements in visual percep-
tion. Nature Reviews, 5:229–240.
Oliver, C. and Quegan, S. (1998). Understanding synthetic
aperture radar images. Artech House, London.
Propokopowicz, P. and Cooper, P. (1995). The dynamic
retina. Int’l J. Computer Vision., 16:191–204.
Simoncelli, E. P. (1999). Bayesian multi-scale differential
optical flow. In Handbook of Computer Vision and
Applications, pages 397–422. Academic Press.
Stemmler, M. (1996). A single spike suffices: the simplest
form of stochastic resonance in model neuron. Net-
work: Computations in Neural Systems, 61(7):687–
716.
Tagawa, N. (2010). Depth perception model based on fix-
ational eye movements using byesian statistical infer-
ence. In proc. ICPR2010, pages 1662–1665.
Tagawa, N. and Alexandrova, T. (2010). Computational
model of depth perception based on fixational eye
movements. In proc. VISAPP2010, pages 328–333.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
334
