
GPU ACCELERATED REAL-TIME OBJECT DETECTION ON HIGH
RESOLUTION VIDEOS USING MODIFIED CENSUS TRANSFORM
Salih Cihan Tek and Muhittin G¨okmen
Department of Computer Engineering, Istanbul Technical University, Maslak, Istanbul, Turkey
Keywords:
Object Detection, Face Detection, GPU Acceleration, CUDA.
Abstract:
This paper presents a novel GPU accelerated object detection system using CUDA. Because of its detection
accuracy, speed and robustness to illumination variations, a boosting based approach with Modified Census
Transform features is used. Results are given on the face detection problem for evaluation. Results show that
even our single-GPU implementation can run in real-time on high resolution video streams without sacrific-
ing accuracy and outperforms the single-threaded and multi-threaded CPU implementations for resolutions
ranging from 640× 480 to 1920× 1080 by a factor of 12-18x and 4-6x, respectively.
1 INTRODUCTION
Real-time object detection has been a very active
topic of research in the last decade. The primary rea-
son of this interest on the subject is the number of
its possible real-world applications both in commer-
cial and non-commercial systems. Most of the com-
plicated applications like virtual reality, surveillance,
video conferencing and robotics require the system to
be able to run in real-time, making the speed of the
object detector as important as the accuracy.
Numerous algorithms have been developed that
can run in real-time provided that the input resolu-
tion is relatively small. Most of them are descendants
of the object detection algorithm proposed in (Viola
and Jones, 2004), which is based on scanning the im-
age with a sliding window at multiple scales and us-
ing a cascaded classifier on each location to obtain
the locations containing the searched object. One ex-
ample of these algorithms is (Fr¨oba and Ernst, 2004),
the algorithm this research is based on. Even though
these algorithms are fast, they are not fast enough to
run in real time on video streams having a high res-
olution like 1280 × 720 without sacrificing the accu-
racy or generalization ability of the system in ques-
tion. Considerable amount of effort has been made
to speed up these algorithms, but algorithmic modi-
fications by themselves are not enough to get drastic
speed improvements required.
Another approach that is becoming increasingly
common is to accelerate the algorithms using the
GPU. In (Sharma et al., 2009), the authors followed
this approach by implementing the Viola-Jones algo-
rithm using CUDA. They achieved a detection rate of
19 Frames Per Second (FPS) on a video stream of res-
olution 1280 × 960 on a GTX 285 GPU. Although
there is an important increase in speed, having %81
accuracy and 16 false positives on the CMU test set
shows that a sacrifice has been made in the accuracy.
In (Hefenbrock et al., 2010), a multi-GPU implemen-
tation of the Viola-Jones algorithm is presented that
runs at 15.2 FPS at 640× 480 resolution on 4 Tesla
GPUs. Another CUDA accelerated Viola-Jones algo-
rithm given in (Obukhov, 2004) performs at 14 and 8
FPS on a GTX 480 for resolutions 1280 × 720 and
1920 × 1080, respectively. The scaling factors are
limited to be integers, which means that the detec-
tor will not be able to detect small faces accurately.
In (Harvey, 2009), the author achieved 2.8 FPS on a
single GTX 280 GPU and 4.3 FPS on a dual GTX
295 GPU on VGA image sizes with another CUDA
implementation of the Viola-Jones algorithm. (Her-
out et al., 2010) is the only GPU accelerated object
detection algorithm to date that uses a different fea-
ture and different classifier structure than (Viola and
Jones, 2004). The reported frame rate is 58 FPS for
1280 × 720 resolution on a GTX 280 GPU with no
information about the accuracy.
In this paper, we follow a similar approach, but
use a different algorithm. We present a GPU imple-
mentation of a boosting based object detection algo-
rithm that uses illumination-robust MCT (Modified
Census Transform) (Fr¨oba and Ernst, 2004) based
classifiers using CUDA. Our implementation per-
685
Cihan Tek S. and Gökmen M..
GPU ACCELERATED REAL-TIME OBJECT DETECTION ON HIGH RESOLUTION VIDEOS USING MODIFIED CENSUS TRANSFORM.
DOI: 10.5220/0003821606850688
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 685-688
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

forms all major steps of the algorithm on the GPU and
hence requires minimum amount of memory transfers
between the host and the GPU. We evaluate the per-
formance of our implementation on face detection.
2 DETECTION ALGORITHM
MCT (Fr¨oba and Ernst, 2004) is a transform that
transforms the pixel values in a given neighborhood
N to a binary string. The binary values corresponding
to a pixel location is obtained by comparing the pixel
values in the neighborhood with their mean. Let N(x)
be a spatial neighborhood centered at the pixel loca-
tion x and I(x) be the mean of the pixel intensity val-
ues on this neighborhood. If
N
is the concatenation
operator, then the MCT can be defined as follows:
Γ(x) =
O
y∈N
ζ(I(x), I(y)) (1)
where the comparison function ζ(I(x), I(y)) is de-
fined as
ζ(I(x), I(y)) =
(
1, I(x) < I(y)
0, otherwise
(2)
In order to obtain memory efficient classifiers, we
use a neighborhood size of 3 × 3, which leads to 9
bit MCT values in the range of [0, 510]. These val-
ues correspond to indices γ of local structure kernels
that can encode structural information about the im-
age like edges, ridges, etc. in binary form.
A MCT based weak classifier h
x
consists of a co-
ordinate pair x = (x, y) relative to the origin of the
24×24 fixed size scanning window and a 511 element
lookup table. The lookup table contains a weight for
each γ such that 0 ≤ γ ≤ 510. The output a weak clas-
sifier gives on a window is determined by calculating
γ from the neighborhood centered at x and getting the
corresponding value from the lookup table.
The detector has a cascaded structure, where each
stage contains a strong classifier containing a number
of weak classifiers, each of which having a different
x position. H
j
(Γ), the strong classifier of the j. stage,
is defined as follows:
H
j
(Γ) =
∑
x∈W
′
h
x
(Γ(x)) (3)
where W
′
⊆ W is the set of unique positions used by
the weak classifiers h
x
in the strong classifier. A win-
dow W passes the j. stage if the sum of the responses
of the weak classifiers on that window is less than or
equal to the stage threshold T
j
. A window is classified
as the searched object if it passes all stages. The cas-
cade used in this work has 5 stages utilizing 10, 20,
40, 80, and 217 positions.
The detection process involves using the classifier
cascade at each location on the input image at multi-
ple scales. As in any other sliding window approach,
there are scanning parameters like horizontal and ver-
tical step sizes (∆x and ∆y), the scale factor (s) and the
starting scale. In this work, we choose ∆x = ∆y = 1,
s = 1.15 and use a starting scale of 1, which results in
a computationally demanding, fine-grained scanning
process and makes it possible to detect faces as small
as 24× 24 accurately.
3 CUDA IMPLEMENTATION
3.1 Preprocessing
In order for the detector to detect objects at various
sizes, the input image needs to be scanned in multiple
scales. In (Viola and Jones, 2004), this is performed
by scanning the same input image with up-scaled
classifiers. The approach we followed is to construct
an image pyramid and scan it using a fixed size win-
dow to prevent sparse global memory accesses that
would have been required by the former approach at
larger scales. The whole image pyramid is stored as
a single image as shown on the left in Figure 1. Even
though this layout has empty regions that increase the
number of windows scanned, it greatly simplifies the
scanning process described in the next section. The
regions having a constant gray level are easily elimi-
nated by the first stage of the cascade.
The image at each level of the pyramid is con-
structed by binding the image from the previous level
to a texture to take advantage of the hardware bilinear
interpolation capability of the GPU, and then down-
sampling it according to the scale factor.
Evaluation of a weak classifier becomes a simple
memory lookup when the MCT values are precom-
puted. To take advantage of this property, the whole
image pyramid is transformed with MCT beforehand
by launching a kernel with a block size of 16 × 16.
Each thread block pulls in a patch from the pyramid
in global memory to its dedicated shared memory be-
fore further processing. Each thread in a block pulls
in a single pixel from the global memory. Since the
MCT computation at the edges and corners requires
additional pixels, threads at the edges and corners
pull in additional pixels. After getting the data to
shared memory, threads in each block are synchro-
nized. Then each thread computes the value corre-
sponding to its location and writes the result to the
global memory. At this point, the original image pyra-
mid is no longer needed and hence can be discarded.
In the remaining sections, the term ”image pyramid”
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
686
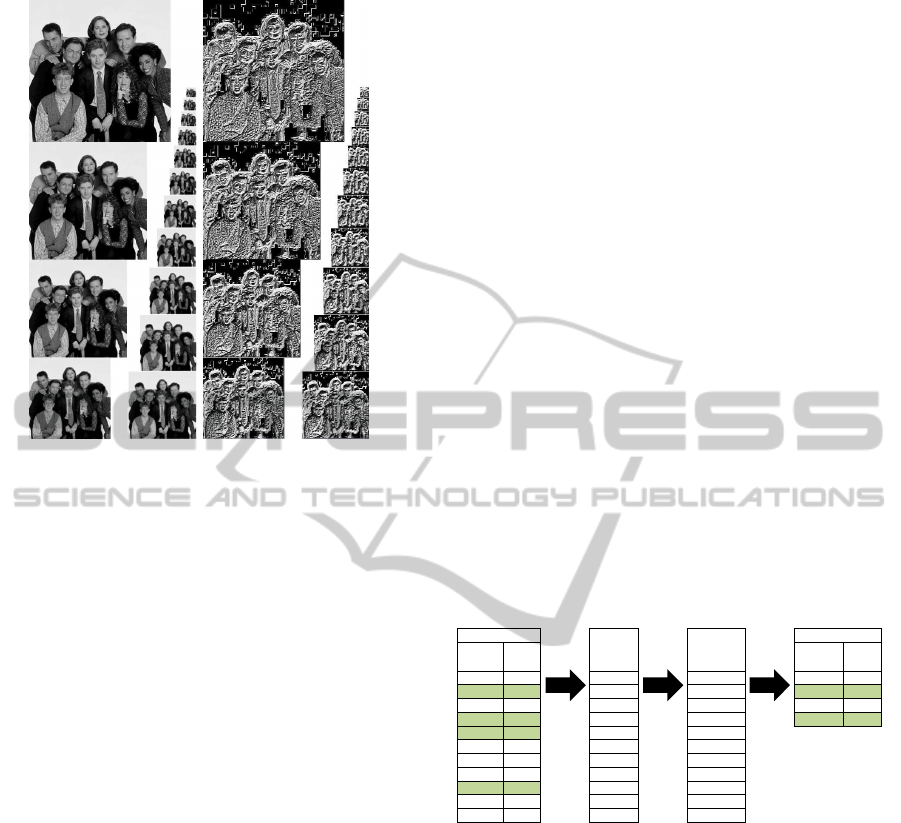
Figure 1: Image pyramid and the result of transforming it
with MCT.
refers to the one containing the result of the MCT,
which is shown on the right side of Figure 1.
During the scanning process, the cascade data will
be heavily accessed and therefore the speed of access-
ing them is crucial for the performance. Since the
size of the constant memory is too small store a cas-
cade containing more than 32 weak classifiers, it is
stored in the texture memory as a 2D floating point
texture. Each row starts with a single floating point
value containing the x and y coordinate of the weak
classifier in its upper and lower 2 bytes, respectively.
Rest of the row contains the weights of the lookup
table. This approach helps to reduce texture cache
misses by making the accesses to the feature weights
as spatially local as possible in the 2D space.
3.2 Object Detection
The detection process involves scanning the image
pyramid with a fixed size sliding window, classifying
the window each location and writing results back to
the device memory. We found that the best perfor-
mance overall is obtained when making each thread
classify a single window on the image pyramid. As
a natural consequence of using a cascaded classifier
structure, the number of stages that will be evalu-
ated in a window cannot be predetermined. Threads
that classify their windows as negative in early stages
have to wait idle until all other threads in the same
block finish their tasks, only after which the process-
ing of a new block can be started. This results in
under-utilization of GPU resources. In order to over-
come this problem, we split the cascade into 2 smaller
groups and use 2 different detection kernels for scan-
ning. Each kernel uses one of the groups obtained in
the previous step for classification. After performing
a number of experiments, we found that the best loca-
tion for the split is after the 2nd stage.
The first detection kernel is launched with a grid
having as many threads as the number of windows
that needs to be scanned and a block size of 16× 16.
When a window is classified as the searched object,
its coordinates are written to the corresponding loca-
tion in a preallocated 1D array of floats that resides
in global memory. Each element of this array can
store the x and y coordinates of a window in its up-
per and lower two bytes, respectively. Since detec-
tions are rare, this array contains sparse data after the
execution of the kernel finishes. Most of its elements
still contain dummy values that are set when it is first
allocated. To solve this problem, we use a stream
compaction algorithm that copies all elements having
meaningful values to the beginning of the array. Then
we launch another detection kernel with a 1D grid of
thread blocks, each one containing a 1D array of 256
threads. Each thread classifies a single window whose
coordinates are fetched from the array generated by
the first kernel. The whole process is shown in Figure
2 for the first 10 windows in the input image.
Window
Origin
Thread
Id
Window
Origin
Thread
Id
0,0
0
-
1,0
1,0
0
1,0
1
1,0
3,0
3,0
1
2,0
2
-
4,0
4,0
2
3,0
3
3,0
8,0
8,0
3
4,0
4
4,0
-
5,0
5
-
-
6,0
6
-
-
7,0
7
-
-
8,0
8
8,0
-
9,0
9
-
-
10,0
10
-
-
1st Kernel
Output
Array
Compacted
Output
Array
2nd Kernel
Figure 2: Steps of scanning with 2 kernels. Window loca-
tions that are detected as positive are highlighted.
3.3 Utilizing Multiple GPUs
We have extended our implementation to reduce the
detection times even further on devices that have mul-
tiple GPUs. We spawn M + 1 CPU threads, where M
is the number of GPUs in the system. The main thread
acquires frames from the video stream and does pre-
liminary computations. Each one of the other threads
performs kernel launches and memory transfers be-
tween the GPU assigned to it and the host. Each
GPU generates several levels of the image pyramid
and scans only those levels. The input image and the
cascade data are copied to the memories of each GPU
separately. Distributing different levels of the pyra-
mid to different GPUs makes it possible to achieve
GPU ACCELERATED REAL-TIME OBJECT DETECTION ON HIGH RESOLUTION VIDEOS USING MODIFIED
CENSUS TRANSFORM
687
nearly linear speed-up when the levels each GPU will
process is carefully determined.
4 EXPERIMENTAL RESULTS
We have tested both the CPU and GPU implemen-
tations on the same desktop PC that contains a Intel
Core i5-2500k processor, 3 GTX 580 GPUs and 8GB
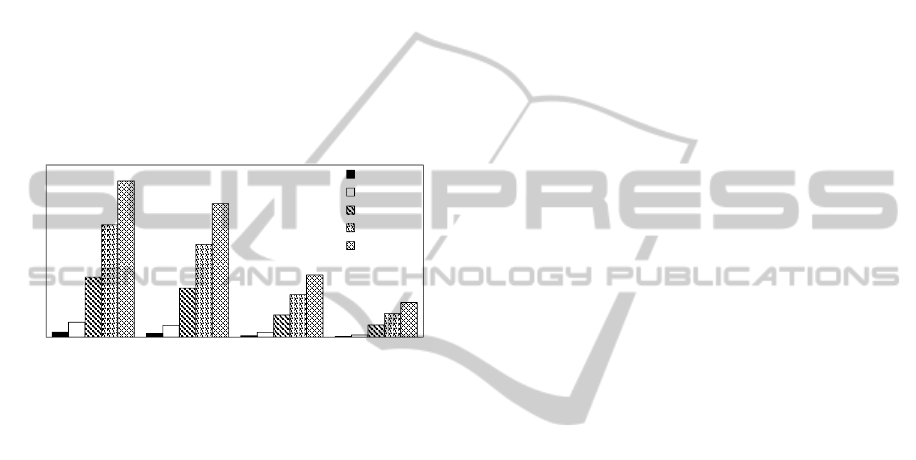
RAM. Figure 3 shows the average number of frames
processed per second by all implementations on video
streams of various sizes. These measurements in-
clude the time required to perform preprocessing and
memory copies between the host and the device. The
multi-threaded CPU implementation uses OpenMP to
distribute the processing to different cores.
14
11
4
2
42
34
14
6
171
140
64
35
320
264
121
68
445
380
177
99
0
50
100
150
200
250
300
350
400
450
640x480 720x540 1280x720 1920x1080
Frames Per Second
Resolution
CPU (1 thread)
CPU (4 threads)
1 GPU
2 GPUs
3 GPUs
Figure 3: Frame rates of GPU and CPU implementations on
various input resolutions.
As it can be seen from Figure 3, even the single-
GPU implementation outperformsthe single-threaded
and multi-threaded CPU implementations by a factor
of 12-18x and 4-6x, respectively. As the resolution
increases, so does the difference between the speed
of the GPU and CPU implementations, clearly show-
ing that a GPU, as a massively parallel processor, is
better suited to process high resolution videos than a
CPU. These results also show that, in contrast to the
CPU, the performance of the GPU based implementa-
tion scales nearly linearly with the number of GPUs.
We have also tested both our CPU and GPU im-
plementations on the CMU+MIT frontal face test set
(Rowley et al., 1998) to validate our results. The de-
tection rates for both implementations are measured
as %90.8 with 32 false positives, proving that our
GPU implementation generates the exact same results
with those of the CPU implementation.
5 CONCLUSIONS
We have presented an efficient GPU implementation
of a boosting based, real-time object detection sys-
tem utilizing MCT based classifiers using CUDA. We
have shown that even our single GPU implementa-
tion outperforms both the single-threaded and multi-
threaded CPU implementations runningon a high-end
CPU. We have pointed out that, because of their mas-
sively parallel architecture, GPUs are more suitable
for working with high resolution videos than CPUs.
Our implementation, with its ability to detect objects
in high resolution video streams in real-time, can eas-
ily be used in modern multimedia, entertainment and
surveillance systems.
ACKNOWLEDGEMENTS
This work is supported by ITU-BAP and TUBITAK
under the grants 34120 and 109E268, respectively.
REFERENCES
Fr¨oba, B. and Ernst, A. (2004). Face detection with the
modified census transform. In Proceedings of the
Sixth IEEE international conference on Automatic
face and gesture recognition, FGR’ 04, pages 91–96,
Washington, DC, USA. IEEE Computer Society.
Harvey, J. P. (2009). Gpu acceleration of object classifi-
cation algorithms using nvidia cuda. Master’s thesis,
Rochester Institute of Technology.
Hefenbrock, D., Oberg, J., Thanh, N. T. N., Kastner, R.,
and Baden, S. B. (2010). Accelerating viola-jones
face detection to fpga-level using gpus. In Proceed-
ings of the 2010 18th IEEE Annual International Sym-
posium on Field-Programmable Custom Computing
Machines, FCCM ’10, pages 11–18, Washington, DC,
USA. IEEE Computer Society.
Herout, A., Joth, R., Jurnek, R., Havel, J., Hradi, M., and
Zemk, P. (2010). Real-time object detection on cuda.
Journal of Real-Time Image Processing, 2010(1):1–
12.
Obukhov, A. (2004). Haar classifiers for object detection
with cuda. In Fernando, R., editor, GPU Gems: Pro-
gramming Techniques, Tips and Tricks for Real-Time
Graphics, chapter 33, pages 517–544. Addison Wes-
ley.
Rowley, H., Baluja, S., and Kanade, T. (1998). Neural
network-based face detection. IEEE Trans. Pattern
Anal. Mach. Intell., 20(1):23–38.
Sharma, B., Thota, R., Vydyanathan, N., and Kale, A.
(2009). Towards a robust, real-time face processing
system using cuda-enabled gpus. In High Perfor-
mance Computing (HiPC), 2009 International Con-
ference on, page 368377. IEEE.
Viola, P. and Jones, M. J. (2004). Robust real-time face
detection. Int. J. Comput. Vision, 57:137–154.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
688
