
AUTOMATIC PROCESS TO BUILD A CONTEXTUALIZED
DETECTOR
Thierry Chesnais
1
, Nicolas Allezard
1
, Yoann Dhome
1
and Thierry Chateau
2
1
CEA, LIST, Vision and Content Engineering Laboratory, Point Courrier 94, F-91191 Gif-sur-Yvette, France
2
Lasmea, UMR6602, CNRS, Blaise Pascal University, Clermont-Ferrand, France
Keywords:
Video Surveillance, Object Detection, Pedestrian Detection, Semi-supervised Learning, Oracle.
Abstract:
This article tackles the real-time pedestrian detection problem using a stationary uncalibrated camera. More
precisely we try to specialize a classifier by taking into account the context of the scene. To achieve this goal,
we introduce an offline semi-supervised approach which uses an oracle. This latter must automatically label a
video, in order to obtain contextualized training data. The proposed oracle is composed of several detectors.
Each of them is trained on a different signal: appearance, background subtraction and optical flow signals.
Then we merge their responses and keep the more confident detections. A specialized detector is then built on
the resulting dataset. Designed for improving camera network installation procedure, the presented method is
completely automatic and does not need any knowledge about the scene.
1 INTRODUCTION
In computer vision, the problem of real-time (at least
10 frames by second) and robust object detection, in
particular pedestrian detection, is still a hot research
topic. These algorithms are useful in video surveil-
lance context or in Advanced Driver Assistance Sys-
tems. Some of the last advances made in this field
have been publied in (Enzweiler and Gavrila, 2009)
(Ger
´
onimo et al., 2010) (Doll
´
ar et al., 2011). The
variability of appearance in the pedestrian class is im-
portant (size, posture, lighting). So it is important to
consider the context of the scene to build a specialized
detector.
Classical approaches to detect objects are based
on machine learning. Support vector machine (Vap-
nik, 1995)(Dalal and Triggs, 2005) and boosting al-
gorithms are the mainly used methods. These pro-
cesses consist to extract the best discriminative fea-
tures between pedestrian and background from a la-
beled training dataset. Then the obtained detector
compares the selected features of a new image with
these of the database to predict the presence of a
pedestrian.
However to reach the best detection performances
with these methods, the training data must be as rich
as possible and own features similar to those com-
puted during the detection step. Consequently it is
essential for the training dataset to be contextualized.
Figure 1: A detector trained on a generic dataset (left) reach
lower performances than a contextualized classifier (right)
when the point of view of the learning and the detection
bases are too different.
Building such a base with thousands examples well
annotated and aligned is an expensive manual task.
That is why it is not realistic to collect examples for
each camera during the deployment of a CCTV equip-
ment. In this case it is often necessary to use a clas-
sifier train on a generic training dataset, hoping this
process will not degrade performances too much (see
the figure 1).
During the last years several approaches have
513
Chesnais T., Allezard N., Dhome Y. and Chateau T..
AUTOMATIC PROCESS TO BUILD A CONTEXTUALIZED DETECTOR.
DOI: 10.5220/0003822105130520
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 513-520
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

been proposed to tackle the problem of automati-
cally building a training dataset in order to exploit
large amount of images recorded by cameras. Semi-
supervised methods are often part of the proposed so-
lutions in bibliography, because they are designed to
use, directly in the training set, labeled but especially
unlabeled data.
The training dataset is called contextualized when
it contains a lot of specifics information coming from
the scene. The data could be integrated in the special-
ized classifier in several ways:
• collecting a large database to train a one shot clas-
sifier is the principle of offline methods;
• training the classifier as soon as new samples
are available, is the principle of online methods.
These latter have been generalized in computer vi-
sion by (Grabner and Bischof, 2006).
Our goal is to propose a new semi-supervised
method. Using an oracle will permit to automati-
cally build a classifier which will be adapted to the
particular context of the scene. We choose to train
our detector with an offline method for two reasons.
Firstly our procedure occurs at the time of a camera
network installation. Although we have all necessary
time to obtain and treat a lot of examples, we prefer to
avoid training an online classifier during exploitation
and keeps all computer resources for detections. Sec-
ondly even if there are some online strong methods
(Leistner et al., 2009), there is still a risk of drifting
that seems not compatible with a long-term use.
In this study, we focus on how to build an oracle.
After having detailed the most used semi-supervised
methods, we describe, in the third part our strategy to
create the oracle. The part 4 presents an evaluation of
the proposed process consisting in an analysis of the
behaviour of the oracle and a comparison with a state
of art classifier.
2 STATE OF ART
There are a lot of families of semi-supervised meth-
ods. The most common approaches are the self-
learning ones, the co-training ones and the methods
based on an oracle.
The self-learning (Rosenberg et al., 2005) ap-
proach consists in using the output of a classifier to
annotate a new example. If a classifier is very confi-
dent about a sample, this latter is added to the base.
This method lacks of robustness suffering from a drift
problem. Mislabeled examples will indeed disrupt the
classifier, change its behaviour for the next samples
and in consequence make the phenomenon worse.
Moreover if the confident threshold used to separate
classes is too low, a lot of false positives will be incor-
porated in the base. On the contrary if the threshold is
too high, only perfectly identified samples, the ones
containing little information, are kept.
The co-training introduced by (Blum and
Mitchell, 1998) is a formalism in which two classi-
fiers are trained in parallel. Each of them uses a dif-
ferent and independent part of the data. For exam-
ple (Levin et al., 2003) train two classifiers, one on
appearance signal and the other one on background
subtraction signal. The co-training algorithm uses the
fact that an example must have the same label with
both classifiers even if they are not trained on the same
data. If one of the detectors labels with confidence a
sample, the other one being unsure, the sample is in-
corporated in the base of the second classifier. During
the training phase, each classifier improves its per-
formance thanks to the confidence of the other one.
Endly we obtain two well trained detectors. Even if
detectors are independent, the problem here is, like
with the self-learning, the outputs of the classifiers are
still directly used to label samples. Drift problem are
not completely excluded because parts of the data are
seldom independent.
Methods based on an oracle use an external en-
tity to build a dataset. This entity annotates all ex-
amples before adding them in the training data. Fi-
nal detector does not affect the outputs of the oracle
reducing the drift problem. The capacity of an ora-
cle to find good samples without error determines the
performance of the final classifier. If the oracle does
not work well on a video the whole system is useless.
A lot of different classifiers have already been pro-
posed. (Wu, 2008) uses a part based classifier applied
on appearance signal. If the oracle find some pedes-
trian parts, the sample is added in the training data.
One drawback of the method is the fact that the or-
acle is composed of only one classifier dealing with
only one signal. Another problem is the difficulty of
detecting pedestrian parts and merging them. To add
robustness, (Stalder et al., 2009) uses an oracle with
several stages. First step consists in detecting people
in the picture. In a second part trackers are initialized
on this detection. The author’s goal is to obtain some
spatio-temporal continuity between oracle detections
to incorporate samples which have not been detected.
Contrary to Wu’s approach, this allows to find some
hard examples. A last stage uses 3D information. The
main drawback of this scheme is its structure. If a
stage failed, errors are inevitably passed to the next
one without any possibility to correct them.
We propose an oracle working in a no-sequential
way in order to improve robustness.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
514

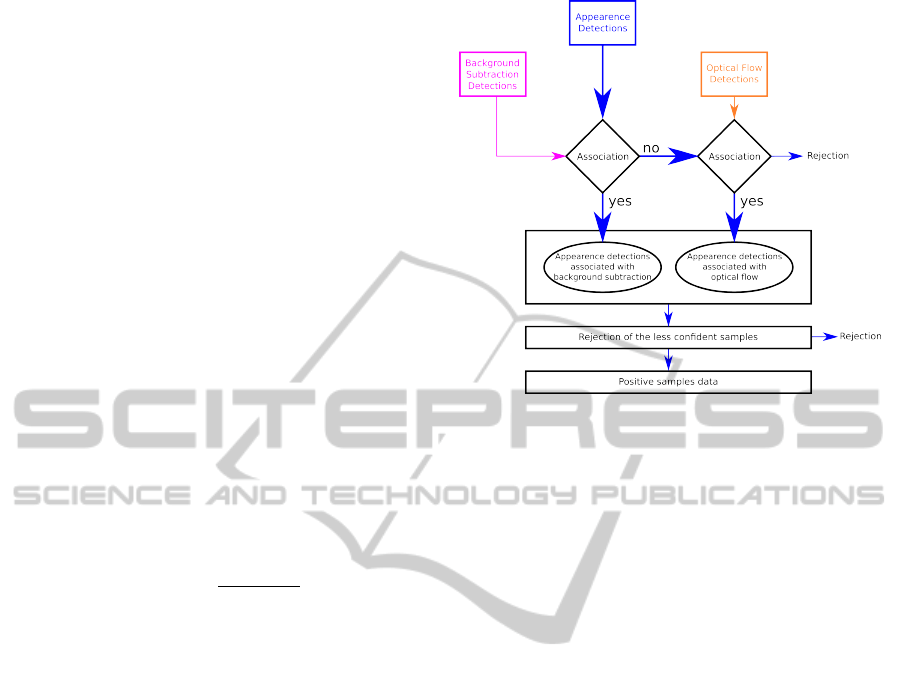
Figure 2: Oracle diagram. The oracle is formed by three independent classifiers based on appearance, background subtraction
and optical flow signals. Each one gives a set of detections which will be merged (see figure 3) to build a contextualized
training dataset. The resulting output is used to create a contextualized powerful detector.
3 CONTEXTUALIZATION OF A
DETECTOR
In this part we describe the different steps of our
method to build an oracle. In the same way than
co-training approach, this latter is formed by several
classifiers working on different and independent sig-
nals. Unlike Stalder’s approach (Stalder et al., 2009)
which uses a sequential oracle, our method has the
ability, after a merging phase, to suppress bad detec-
tions given by each of the signals. This capacity im-
proves the training set.
3.1 Oracle
3.1.1 Specifications
The oracle must automatically annotate a video which
means finding relevant observations and the associ-
ated labels.
The oracle is a pedestrian detector with charac-
teristics different from the contextualized detector.
In addition to be real-time, this latter must detect
as many pedestrians as possible with minimal false
positive rate. In other words, it must have both a
high recall:
number of good detections
number of pedestrians
and a high precision:
number of good detections
number of detections
. For the oracle, it is possible to
release some constraints. It does not need to be real-
time since our method counts two steps. The first one
could last for a long time. Moreover our purpose is
to build a training dataset. It is not penalizing to miss
some pedestrians since the video is long enough to of-
fer a lot of positive examples. To sum up, the oracle
could have a lower recall than the final detector, but in
order to minimize the label noise in the contextualized
base, it must be as precise as possible.
3.1.2 Constitution
To satisfy these specifications we decide to use a com-
bination of elementary classifiers (figure 2). Each of
them is trained on a different and independent sig-
nal like in the co-training method. Therefore a merg-
ing phase (figure 3) is able to correct some errors, by
cross-validating responses given by each classifier.
In this article we have exploited three signals: ap-
pearance (descriptor based on gradient), background
subtraction (Stauffer and Grimson, 1999) and opti-
cal flow (Black, 1996). Each classifier is based on
a different descriptor implying that it uses a different
generic training data. The three classifiers are running
in parallel.
3.1.3 Building a Contextualized Training Data
The three previously trained classifiers build a base
by scanning context images. For every position and
scale in an image, each classifier gives a detection
score. The next step of the process implies to merge
the confidence maps. Unfortunately the classifiers are
a priori independent and their outputs are not com-
parable. There are two solutions: working directly
with the confidence maps after normalizing them to
AUTOMATIC PROCESS TO BUILD A CONTEXTUALIZED DETECTOR
515
be sure they are comparable; or working on the detec-
tions given by each classifier after a clustering. We
choose the last option. In a similar manner as (Dalal
and Triggs, 2005), we use a meanshift to group all
the boxes which have a positive score. Each resulting
fused detection has a score which corresponds to the
sum of the group boxes’ scores. For an image we get
a set of detections (box and score) for each classifier.
The positive examples correspond to observa-
tions with which the generic classifiers are confident.
The merging phase between the detectors is a delicate
step. If this process is too restrictive, some hard and
thus interesting examples can be missed. On the con-
trary if this step is too weak, the training data would
be polluted by lots of false positive samples.
A detection is incorporated in the base only if it
appears in the output of several classifiers. A ma-
jority vote is done as explained in figure 3. First a
greedy association is performed between the detec-
tions coming from the appearance detector and these
coming from the background subtraction one. Only
the associated detections coming from appearance are
added in the contextualized base. The association is
performed using an overlap criterion between detec-
tions. Like (Everingham et al., 2009) we use the cri-
terion: sim
detection
(B
1
, B
2
) =
Area(B
1
∩B
2
)
Area(B
1
∪B
2
)
. If two boxes
have a similarity under 0.5, they are considered not-
linked. A second association is realized between the
remaining detections coming from appearance and
these coming from the optical flow detector. As previ-
ously, the associated detections coming from the ap-
pearance are integrated to the base whereas the not
associated boxes are thrown. In fact this vote corre-
sponds to a check on detections from appearance sig-
nal with these from background subtraction and opti-
cal flow used as validation. These last two detectors
are characterized by their lack of precision whereas
the one based on appearance signal gives a more ac-
curate response. That is why the merge step favours
the detections coming from appearance and validate
them with the two other classifiers.
A last filter on the boxes score is done in the train-
ing dataset. As all detections come from appearance
signal, scores are comparable. During this final step
about 50% of the less confident examples are sup-
pressed.
After selecting the positive examples, we need to
compute the negative samples. Our strategy consists
in choosing random boxes in the whole image except
in areas where there is at least a positive detection.
As the oracle has a low recall, it does not detect all
pedestrians. Some can be incorporated in the negative
base. It is rather unlikely because there are a lot more
negative examples in an image than positive ones.
Figure 3: Workflow, illustrating the three classifiers merge
process, designed to provide positive samples.
As we are working on a static scene, a lot of ob-
servations are similar. The risk here is to create a base
not rich enough with to few hard examples. To deal
with this problem, we add in the base some examples
which contains pedestrian parts. They correspond to
an image example intersecting with a oracle detection.
However both samples must not overlap too much and
verifying the previously defined criterion:
sim
detection
(B
pedestrian
, B
negative example
) < 0.5
3.2 Building a Contextualized Detector
To create a contextualized detector, we need to train a
new classifier with the contextualized training data.
A possibility is to do an offline training using a
dataset containing the three signals and let the boost-
ing algorithm choose a good combination between
them. With this approach, a maximum of information
from the training set is exploited. In our experiments
we remark than the final detector obtained with this
method is not significantly performing better than a
detector only trained on an appearance signal, how-
ever the computing time increases a lot from one to
the other solution. In consequence we choose a sim-
pler classifier based only on the appearance signal as
final detector.
4 EVALUATIONS
In this section we do a method assessment split in two
parts. Firstly we study characteristics of the oracle
presented in section 3. Secondly we compare perfor-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
516
mances of the final detector with a state-of-art one and
show its competitiveness.
The algorithm has been tested on the freely avail-
able datasets: PETS 2006
1
, PETS 2007
2
.
We evaluate our system with the method de-
scribed in (Agarwal et al., 2004) and illustrated with
precision-recall curves. Precision is Pr =
T P
T P+FP
and
recall is R =
T P
P
where TP is the number of true posi-
tives, FP the number of false positives and P the num-
ber of pedestrian. We plot the curves R depending on
(1 − Pr). The optimal point is located in (0, 1). F-
Measure is defined as FM = 2.
Pr.R
Pr+R
.
The similarity criterion used between the ground
truth (GT) and a test box (B) before the clustering is:
sim(GT, B) =
(GT
cx
− B
cx
)
2
(0.5 ×w(GT ))
2
+
(GT
cy
− B
cy
)
2
(0.5 ×h(GT ))
2
with:
• cx and cy corresponding respectively to the ab-
scissa and to the ordinate of the centre of a box,
• w(GT ) and h(GT ), respectively the width and the
height of the ground truth box.
Two boxes are similar if sim(GT, B) ≤ 1. This
criterion could be seen as a definition of an ellipse
around the center of a ground truth box. If the center
of a detection fall in this ellipse it is considered as pos-
itive. If two detections are linked to the same ground
truth box, only one true positive sample is counted.
Others boxes correspond to false detections.
4.1 Characteristics of the Oracle
In this paragraph, we study the oracle characteristics
by checking if it corresponds to the specifications. As
previously explain we train three generic classifiers on
appearance, background subtraction and optical flow
signals. Each classifier is trained with 400 rounds
of boosting (Real-AdaBoost using decision stumps
(Friedman et al., 1998) (Schapire and Singer, 1999))
without cascade. With the same detection threshold,
not using a cascade increases the recall of the detec-
tor (more detections) but decreases its precision (more
false positives). This latter is optimized by the classi-
fiers merging phase.
The appearance classifier uses a descriptor based
on gradient. We use the same descriptor for the opti-
cal flow. Horizontal and vertical components of opti-
cal flow correspond to horizontal and vertical compo-
nents of the gradient of appearance. However for the
background subtraction descriptor we decide to use
1
http://www.cvg.rdg.ac.uk/PETS2006/
2
http://www.cvg.rdg.ac.uk/PETS2007/
Haar wavelets. Unfortunately with these features, it
is impossible to know if a homogeneous area is a part
of an object or just background. To solve this prob-
lem we add in our descriptor the mean of the current
wavelet window.
We collect, from the INRIA person dataset
3
, 2417
positive and 25742 negative examples to train our
appearance detector. This dataset have no temporal
information. Consequently we build two new inde-
pendent datasets for the others classifiers. We train
the background detector with 787 positive and 6466
negative samples and the optical flow detector with
776 positive and 8000 negative examples. Detection
threshold are set to 0 for all classifiers.
4.1.1 PETS 2006
We evaluate our method on the view 4 of the PETS
2006 dataset. The examples of the training data are
coming from S2-T3-C and we test the final detector
on about 1000 frames from S7-T6-B.
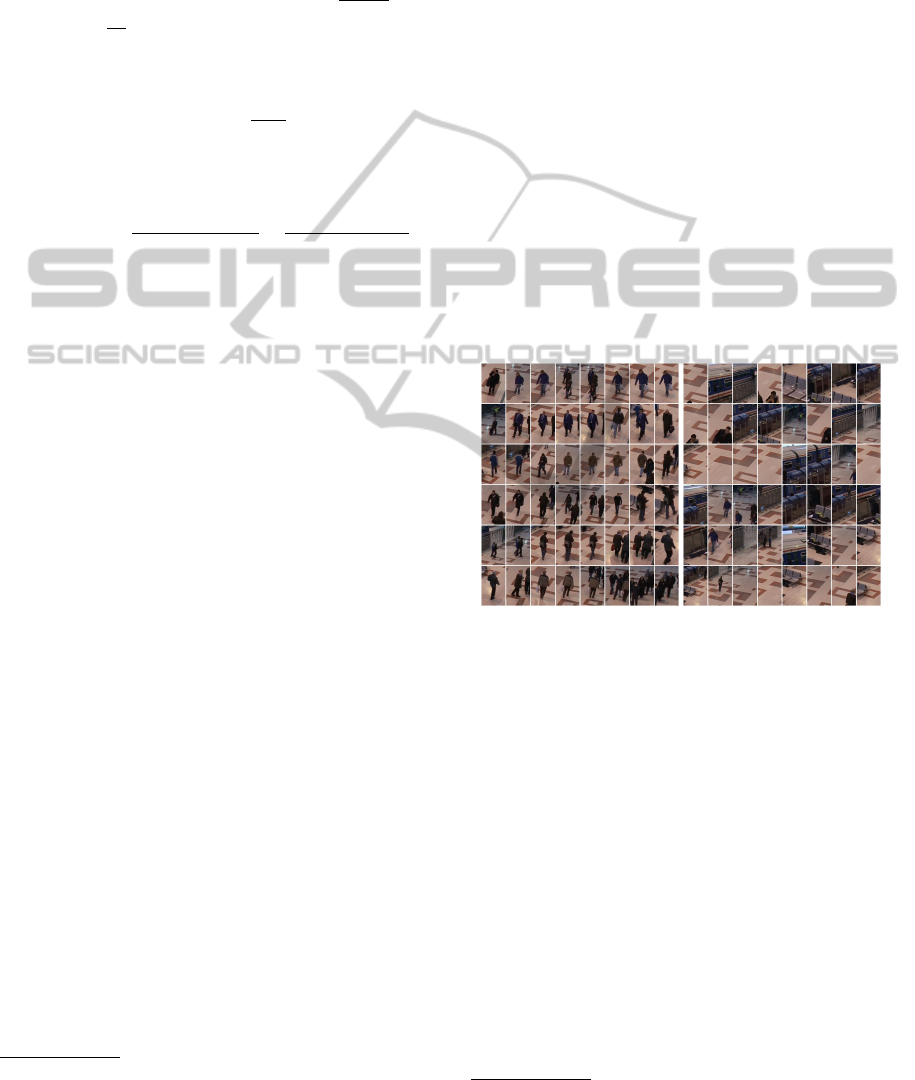
(a) Positive examples. (b) Negative examples pos-
sibly containing pedestrian
parts.
Figure 4: Contextualized training data extracted from the
PETS 2006 dataset.
The figure 4 shows some samples of the training
data after the merge of the classifiers. For positive ex-
amples a large majority of thumbnails are effectively
a pedestrian. However there are still two main issues:
• When several pedestrians are close, the clustering
could not always separate them correctly and that
tends to misaligned the resulting example,
• The size of the thumbnail is not always adapted to
the object.
As we hoped, almost all the negative examples
correspond to areas without pedestrian or include lim-
ited pedestrian parts.
3
http://pascal.inrialpes.fr/data/human/
AUTOMATIC PROCESS TO BUILD A CONTEXTUALIZED DETECTOR
517
On the training video (S2-T3-C - 4), the oracle
obtain a recall of 0.16 and a precision of 0.99. No-
tice that because of the filtering step after the merg-
ing phase, the recall value depends on the number of
frames we use to build the training dataset. As ex-
pected the oracle has a very high precision. The re-
sult are obtained without any knowledge of the scene
(like the ground plane or a 3D model of the scene)
and without any threshold since all detectors have the
same detection threshold (the threshold is fixed to 0).
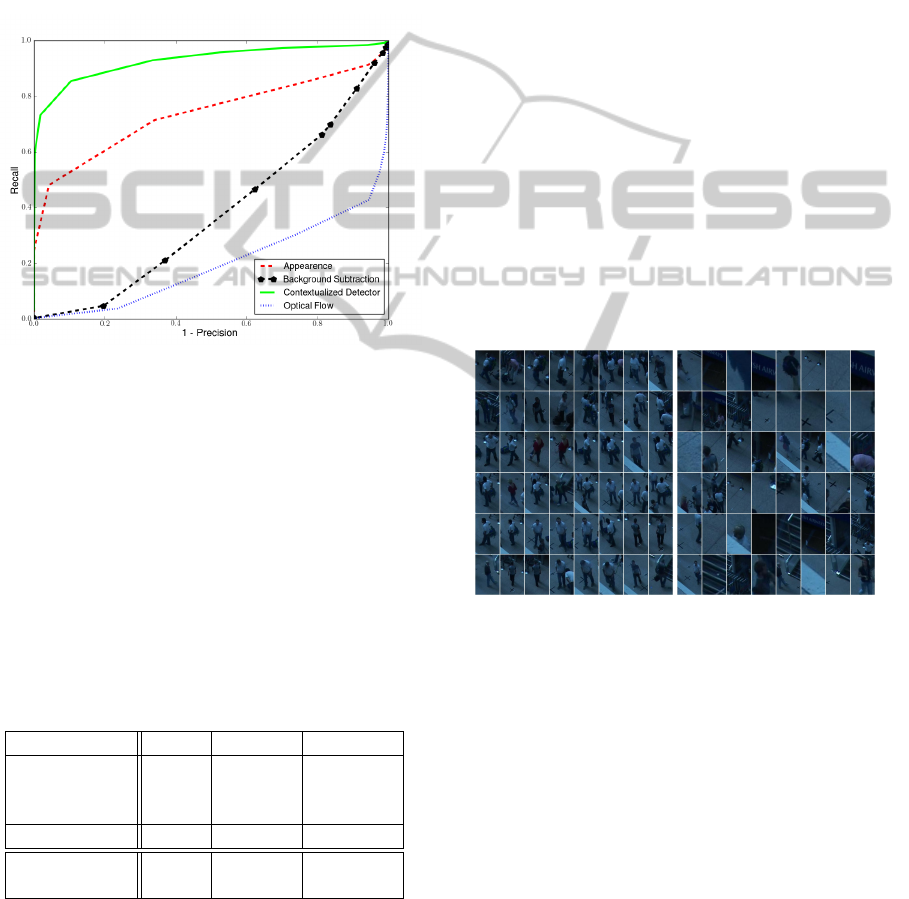
Figure 5: Precision-Recall curves illustrating detection per-
formances on PETS 2006 for the three classifiers forming
the oracle and the contextualized detector.
We can see on the figure 5 the precision-recall
curves of each detector involved in the oracle and
the curve of the contextualized detector. This lat-
ter only uses appearance information and is trained
in the same way than the oracle appearance detector.
The training data is the only difference between them.
1800 positive and 8000 negative examples are kept af-
ter the filter step in the classifier merging process and
are used for the training.
Table 1: Results of the different classifiers applied on PETS
2006 - S7-T6-B - 4.
Recall Precision F-Measure
Appearance 0.71 0.66 0.69
Background 0.47 0.38 0.42
Optical flow 0.30 0.26 0.28
Oracle 0.49 0.99 0.65
Contextualized
detector 0.85 0.90 0.87
The table 1 gives recall and precision values for
each classifier where its f-measure is maximized. The
precision of the background subtraction and optical
flow classifiers are weak. This can be explained by
the fact that they are not very discriminant. Their
detections are spread around a target and often, two
close pedestrians are confused after clustering. As
we explain, when we have presented the merging
step, background subtraction and optical flow detec-
tors could be seen as presence captors, reliable to pre-
dict pedestrian presence but inaccurate in location,
whereas the appearance detector is less robust but its
detections are well localized.
4.1.2 PETS 2007
We test our algorithm on the third view of PETS 2007.
It is to notice that the pedestrians are shot with a high
angle and are generally leaned in this video. This
point of view is interesting to illustrate the interest of
our approach because of their differences with the IN-
RIA dataset (pedestrians are taken from the front and
are straight), used to train our initial classifier based
on appearance.
The contextualized training data has been built on
the sequence called S03. Each detector is evaluated
on the 1000 first images of the fifth video.
(a) Positive examples. (b) Negative examples pos-
sibly containing pedestrian
parts.
Figure 6: Contextualized training data extracted from the
PETS 2007 dataset.
The figure 6 shows samples from the training data
collected after the fusion of classifiers forming the or-
acle.
The figure 7 presents the recall-precision curves
for each classifier of the oracle and the contextualized
detector.
In the same way than PETS 2006, the table 2 con-
tains precision and recall values for each classifier
where its F-measure is maximized. In the oracle case,
results are only given on positive examples.
Contrary to previous video, classifiers based on
background subtraction and optical flow signals have
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
518
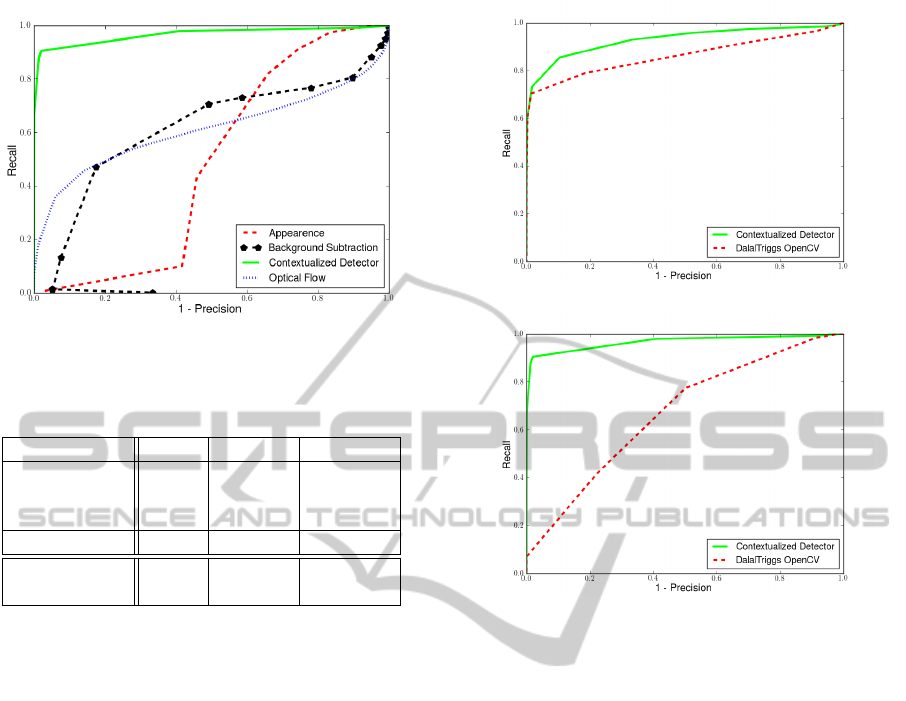
Figure 7: Precision-recall curves on PETS 2007 for three
classifiers in the oracle and the final detector.
Table 2: Results of the different classifiers applied on PETS
2007 - S05 - 3.
Recall Precision F-Measure
Appearance 0.82 0.34 0.48
Background 0.47 0.82 0.60
Optical Flow 0.54 0.72 0.62
Oracle 0.40 0.99 0.57
Contextualized
detector 0.90 0.98 0.94
better performances than the one on appearance sig-
nal. It could be easily explained:
• Examples collected on this sequence and these
coming from the training data have very different
appearances. Consequently a classifier using only
this signal has poor performances.
• There are several groups of people in this video.
Classifiers which are not very discriminant are not
too penalized because even if a detection is far
from a pedestrian, an other one could be caught
in the detection window.
As curves prove it on these two datasets, a contex-
tualized detector reaches better recall and precision
than the generic oracle only based on appearance.
4.2 Performances of the Contextualized
Detector
In this part we compare performances of the contextu-
alized detector with a state of art one. We choose the
Dalal and Triggs (Dalal and Triggs, 2005) detector
available in OpenCV. We apply the same evaluation
criterion.
Curves on the figure 8 show results on the two se-
quences used in this paper. On the PETS 2006 video
both classifiers have similar results. Dalal and Triggs
(a) PETS 2006.
(b) PETS 2007.
Figure 8: Recall-precision curves of our final detector
(green) and the one of Dalal and Triggs (red) on PETS 2006
and 2007.
detector already reaches a high level of performances.
Therefore although our approach improves the de-
tection rate, both classifiers could be use on this se-
quence. On the contrary when the video and the learn-
ing dataset have a very different point of view, Dalal
and Triggs detector is not very successful in detecting
most of pedestrians. In this case, our method, using an
oracle formed by basic classifiers, can achieve good
performances because the detector is contextualized.
When the training data and the scene are too dif-
ferent, a contextualized detector improves results sig-
nificantly.
5 CONCLUSIONS
We proposed a semi-supervised method. It is aimed
at automatically training a contextualized detector. To
achieve this goal we create an oracle composed of
several classifiers. Each of them works on a distinct
signal. A merging step of the different responses is
then done to build a specialized training database.
This set is then used to train a final detector incor-
AUTOMATIC PROCESS TO BUILD A CONTEXTUALIZED DETECTOR
519

porating contextualized information.
Even if our approach gives some good results, sev-
eral improvements are possible.
• As previously notice, classifiers based on back-
ground subtraction and optical flow are not very
precise. They are less discriminant in fact and
they tend to merge proximate detections. To mit-
igate this phenomenon, it is possible to use cali-
brated cameras in order to remove aberrant detec-
tions. Unfortunately this requires a manual step
during the camera network installation. That is
why we do not use it.
• In this study, we choose to build an oracle with
three signals. However it is possible to use other
ones. For example if we have a stereo camera,
it is possible to learn a classifier directly on the
disparity maps and add it in the oracle.
• We choose to use an offline algorithm to train our
final detector. However it could be interesting to
study the behavior of our system with an online
training. This has the advantage to allowed a regu-
lar update of the classifier, in the hope to tackle the
problem of changes in the scene (lighting, back-
ground. . . ).
REFERENCES
Agarwal, S., Awan, A., and Roth, D. (2004). Learning to
detect objects in images via a sparse, part-based repre-
sentation. Pattern Analysis and Machine Intelligence.
Black, M. (1996). The Robust Estimation of Multiple Mo-
tions: Parametric and Piecewise-Smooth Flow Fields.
Computer Vision and Image Understanding.
Blum, A. and Mitchell, T. (1998). Combining labeled and
unlabeled data with co-training. In Proceedings of the
eleventh annual conference on Computational learn-
ing theory.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Int. Conf. on Computer
Vision and Pattern Recognition.
Doll
´
ar, P., Wojek, C., Schiele, B., and Perona, P. (2011).
Pedestrian detection: An evaluation of the state of the
art. Pattern Analysis and Machine Intelligence.
Enzweiler, M. and Gavrila, D. M. (2009). Monocular
pedestrian detection: Survey and experiments. Pat-
tern Analysis and Machine Intelligence.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn,
J., and Zisserman, A. (2009). The PASCAL Visual
Object Classes Challenge 2009 (VOC2009) Results.
Friedman, J., Hastie, T., and Tibshirani, R. (1998). Addi-
tive logistic regression: a statistical view of boosting.
Annals of Statistics.
Ger
´
onimo, D., L
´
opez, A. M., Sappa, A. D., and Graf, T.
(2010). Survey of pedestrian detection for advanced
driver assistance systems. Pattern Analysis and Ma-
chine Intelligence.
Grabner, H. and Bischof, H. (2006). On-line boosting and
vision. In Int. Conf. on Computer Vision and Pattern
Recognition.
Leistner, C., Saffari, A., Roth, P. M., and H., B. (2009). On
robustness of on-line boosting - a competitive study.
In Int. Conf. on Computer Vision - Workshop on On-
line Learning for Computer Vision.
Levin, A., Viola, P., and Freund, Y. (2003). Unsupervised
improvement of visual detectors using co-training. Int.
Conf. on Computer Vision.
Rosenberg, C., Hebert, M., and Schneiderman, H. (2005).
Semi-supervised self-training of object detection
models. IEEE Workshop on Applications of Computer
Vision.
Schapire, R. E. and Singer, Y. (1999). Improved boosting al-
gorithms using confidence-rated predictions. Machine
Learning.
Stalder, S., Grabner, H., and Gool, L. V. (2009). Explor-
ing context to learn scene specific object detectors. In
IEEE International Workshop on Performance Evalu-
ation of Tracking and Surveillance.
Stauffer, C. and Grimson, W. E. L. (1999). Adaptive back-
ground mixture models for real-time tracking. In Int.
Conf. on Computer Vision and Pattern Recognition.
Vapnik, V. N. (1995). The nature of statistical learning the-
ory. Springer.
Wu, B. (2008). Part based object detec-
tion, segmentation, and tracking by boost-
ing simple feature based weak classifiers.
http://sites.google.com/site/bowuhomepage/curriculu
m-vitae.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
520
