
ADAPTIVE IMAGE SENSOR SAMPLING FOR LIMITED MEMORY
MOTION DETECTION
David Gibson
1
, Henk Muller
2
and Neill Campbell
1
1
Computer Science, University of Bristol, Bristol, U.K.
2
XMOS Ltd, Bristol, U.K.
Keywords:
Motion Detection, Programmable Sensors, Low Memory.
Abstract:
In this paper we propose that the combination of a state-of-the-art high frequency, low energy demanding
microprocessor architecture combined with a highly programmable image sensor can offer a substantial re-
duction in cost and energy requirement when carrying out low-level visual event detection and object tracking.
The XMOS microprocessor consists of a single or multi-core concurrent architecture that runs at between
400 and 1600 MIPS with 64KB per-core of on chip RAM. Modern highly programmable image sensors such
as the Kodak KAC-401 can capture regions-of-interest (ROI) at rates in excess of 1500fps. To compare the
difference between two 320 by 240 pixel images one would usually require 150KB of RAM, by combining
the above components as a computational camera this constraint can be overcome. In the proposed system the
microprocessor programs the sensor to capture images as a sequence of high frame rate regions-of-interest.
These regions can be processed to determine the presence of motion as differences of ROIs over time. By
providing additional cores extensive image processing can be carried out and ROI pixels can be composited
onto an LCD to give output images of 320 by 240 pixels at near standard frame rates.
1 INTRODUCTION
There is increasing interest in low cost computer vi-
sion systems with a wide range of applications includ-
ing gesture based user interfaces, surveillance, au-
tomotive systems and robotics. As the complexity
of consumer, sensing and military systems increase
the demands on energy resources becomes critical for
high-level computing performance. Vision systems
are proving to be extremely valuable across a range
of applications and to be able to efficiently process vi-
sual information offers a huge advantage in the func-
tionality of such systems.
Traditional computer vision systems typically
consist of a camera continually capturing and trans-
mitting images at a fixed frame rate and resolution
with a host computer sequentially processing them
to obtain a result such as the trajectory of a mov-
ing object. A major drawback of this pipeline is that
large amounts of memory are required to store the im-
age data before it is processed, especially as frame
rate and image resolution increase. Additionally large
amounts of the image data is transmitted to the host
for processing regardless of the amount of informa-
tion contained in this data. In the case of object trac-
king computer vision algorithms work towards creat-
ing a concise description such as a group of pixels
at a certain location is moving in a particular way.
Often the object is relatively small compared to the
whole image and the background maybe static. In
cases like this the traditional computer vision process-
ing pipeline could be considered as being highly inef-
ficient as large amounts of image data are being cap-
tured, transmitted to the host, stored in memory and
being processed on a per-pixel basis while most of
the visual information comes from a small number of
changing pixels. In such cases most of the image data
is discarded as it contains no useful information.
In the case of a scene with an object moving
across a static background most of the image data
changes very little while some pixel areas might
change rapidly or move a different speeds. The fixed
temporal sampling rate of standard camera systems
cannot take this into account and artifacts such as mo-
tion blur and temporal incoherence are introduced.
These artifacts consequently confound down stream
processing necessitating ever more complexcomputer
vision algorithms to overcome these imaging effects.
In (Shraml, S. and Belbachir, A. N., 2010) a so-
called Dynamic Vision System (DVS) (Lichtsteiner,
399
Gibson D., Muller H. and Campbell N..
ADAPTIVE IMAGE SENSOR SAMPLING FOR LIMITED MEMORY MOTION DETECTION.
DOI: 10.5220/0003824603990402
In Proceedings of the 2nd International Conference on Pervasive Embedded Computing and Communication Systems (PECCS-2012), pages 399-402
ISBN: 978-989-8565-00-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

P. and Posch, C. and Delbruck, T., 2007) is used to
overcome the issues discussed above. The DVS has
very low latency and only delivers pixel difference
information when pixel luminance values change.
While this is an exciting new technology it has two
major drawbacks; it is low resolution (only 128 by
128 pixels) and only image differences are captured
so a traditional image cannot be created.
In this paper we propose a system that conceptu-
ally fits between the DVS of above and a traditional
computer vision capture system. By scanning regions
of interest on the surface of the sensor at high sam-
pling rates, piece-wise image processing can be car-
ried out in very small amounts of memory. The first
level of processing involves temporal ROI differenc-
ing to determine whether any activity has occurred in
the current ROI. This temporal ROI differencing can
be used to provide a powerful technique for control-
ling the amount and rate at which data is captured by
the sensor, the amount and extent of further image
processing that is performed and whether pixel data
should be transmitted, stored or displayed. The poten-
tial of the low-level ROI differencing is demonstrated
by two prototype hardware systems built to investi-
gate the combination of XMOSs’ high frequency mi-
croprocessor and a highly programmable image sen-
sor.
2 SYSTEM ARCHITECTURE
The XMOS
1
XCore is a multi-threaded processing
component with instruction set support for commu-
nication, I/O and timing. Thread execution is deter-
ministic and the time taken to execute a sequence of
instructions can be accurately predicted. This makes
it possible for software executing on an XCore to per-
form many functions normally performed by hard-
ware, especially DSP and I/O. An initial prototype
was constructed to test the feasibility of the system
described above, Figure 1. As a minimal system it
consisted of a single core XMOS XS1-L1 processor
running at 400 MIPS with four fast threads directly
connected to a Kodak KAC-401 WVGA image sen-
sor
2
. The XMOS architecture allows for four fast
threads per core and while more threads are available
they will share the system resources between them.
In this application the high clock speed of the im-
age sensor dictated that only fast threads could be
used. The Kodak KAC-401 image sensor is highly
1
www.xmos.com
2
Technical datasheet obtained in 2010, “MTD-PS-1170
KAC-00401
Revision 1.0 MTDPS-1070.pdf”, no longer
available from Kodak.com.
Figure 1: The initial prototype (left) consisting of a sin-
gle core XMOS XS1-L1 and a Kodak KAC-401 image sen-
sor. The sensor is directly connected to the processor, a
M12 lens is shown to give a reference to the scale of the
components and would normally cover the sensor. A four-
threaded architecture (right) with the thread connectivity is
described. Data is received by the XCore via bi-directional
hardware ports and communication between threads is car-
ried out via bi-directional channels.
programmable and provides features such as pixel
binning (image sub-sampling), region-of-interest po-
sitioning, frame and row delays, digital and analogue
gain adjustment, variable bit-depth, etc. The default
clock speed is 25MHz and the sensor registers are up-
dated using the I2C protocol. To program the sen-
sor intermediate registers are written to and an update
register is set, an update is triggered which then takes
a single frame cycle to write from the intermediate
registers to the main register set.
Throughout this paper the pixel depth was set to
8 bits and ROI were set to 64 by 40 pixels and pro-
grammed as a 5 by 6 ROI grid to cover the exposed
sensor surface. The sensor resolution was set to 640
by 480 pixels and 2 by 2 pixel binning was used to
give an effective image resolution of 320 by 240 pix-
els. The XMOS processors were programmed via a
JTag connection to a host PC, the JTag connection in-
cludes a 10Kbs UART which was used in the initial
prototype.
The initial prototype consisted of one thread to
read from the sensor two consecutive ROI at a given
grid location, each 64 by 40 pixels and consisting of
2560 bytes. This data is passed to a second, image
processing, thread which compares the buffered pix-
els values of the ROI pair. As there were not enough
resources for displaying results on an LCD, the re-
sults of the ROI comparison are transmitted as a bit
pattern via a third thread running a UART to the host
side console via the JTag connection. In a synchro-
nized and concurrent manner the fourth thread pro-
grams and updates the sensor to capture the next ROI
of the grid. As will be discussed in the results sec-
tion, the output of the initial prototype responded as
expected to basic stimuli such as passing a hand over
and above the sensor, this lead to the development of
a phase two prototype consisting of a multi-core ar-
chitecture and LCD.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
400
In order to further explore the concepts described
above a second prototype was built. This system com-
prised of the same image sensor but with a number of
quad-core processors, ethernet and a LCD display. A
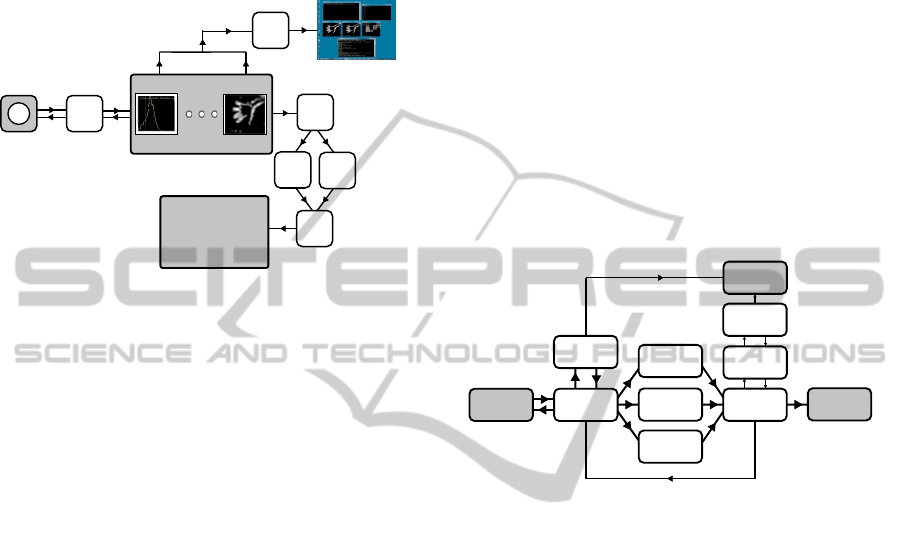
schematic of this more extensive system is shown in
Figure 2.
320x240 LCD
Image sensor
Sensor
Grabber
Control
LCD
Driver
Buffer
Manager
Ethernet
LCD
Buffer1
LCD
Buffer2
Image Processing
Multi-core
5.9MHz
25MHz
>30KBs
Host PC UDP/IP server
debug interface
Figure 2: The system architecture of the second phase pro-
totype, roughly from left to right; Pixels are read in from
the sensor as a series of sub-images and passed onto the
image processing sub-system. The results of the image pro-
cessing sub-system are used to re-program the frame delay,
gain and sub-image position and size registers of the image
sensor. Image processing state spaces are transmitted to an
ethernet delegate and the raw pixel data is passed through,
via the frame buffering sub-system, to the LCD. The inter-
nal states of the image processing sub-system are visualized
in their various forms using a windows based interface.
A detailed representation of the multi-core image
processing sub-system is shown in Figure 3. The sys-
tem proceeds as follows; the sensor is programmed to
grab a ROI, data is read from the grabbing thread into
the first image handling thread, while, concurrently,
image data is passed on to a histogram analysing
thread. In this thread a histogram is created for ev-
ery other whole image and it’s mean is compared to
a pre-defined ideal mean value. A proportional in-
tegral derivative (PID) control is used to adjust the
frame delay and analogue gain so as to move the cur-
rent mean towards the ideal, the updated values are
sent back to the grabber thread where they are used
to update the sensor registers. Meanwhile, the image
handler passes the ROI pixel data onto the a set of par-
allel threads to compute the integral images from each
ROI image. The first image handler also requests the
next ROI from the sensor. In the current implemen-
tation the integral ROI images are just used to create
an 8 by 8 mean filtered representation of each 64 by
40 pixel ROI. Each 8 by 8 mean ROI representation
is added to a 40 by 48 array to give low resolution
representation of the high resolution 5 by 6 sensor
grid sampling. The 40 by 48 array is considered as a
set of observations which is compared to the previous
frame of observations, the difference of which gives
a motion detection map. The motion detection map
is smoothed by a 3 by 3 gaussian filter each frame
to generate a motion-history-image style representa-
tion (Davis and Bobick, 1997). The image difference
and gaussian filter parts of the architecture in Figure 3
allow for results of statistical analysis to be feed back
to the first image handler and sensor via the second
image handler. The second image handler also chan-
nels the original pixel data on to the LCD output sys-
tem. The results of parts of the image processing ar-
chitecture are concurrently passed on to an ethernet
delegate which transmits data to a server running on
the host PC system. The later has proved invaluable
for debugging, algorithm prototyping and visualisa-
tion of the internal states of the image processing sys-
tem.
Gaussian
Filter
Image
Differences
Image
Input
Image
Handler
Integral
Image
Integral
Image
Integral
Image
Image
Handler
Image
Output
Histogram
Calculation
Ethernet
Delegate
Figure 3: The image processing sub-system with parallel
and concurrent thread usage which is distributed across a
single quad-core XMOS processors.
3 RESULTS
In Figures 2 and 3 each small block effectively rep-
resents a single thread of the system. Consequently
all of the image capture, sensor programming, image
processing and LCD management can fit on a single
16 thread quad-core processor running at 1600 MIPS.
The ethernet connection requires two more threads.
The initial prototype generated a bit pattern where
each bit represented a ROI and was set for motion
detected and off for no motion. The system output
behaved as expected when passing a hand over the
sensor. However, using the ethernet and LCD output
of the second prototype gave a much greater insight to
the performance and functionality of the system. Ta-
ble 1 shows timings of the system. The histogram pro-
cessing is used to attempt to obtain a reasonable in-
tensity balance for image pixels in varying light con-
ditions. The system works in two modes; good light
and bad light modes and the frame delay is allowed to
change within a fixed range to best adapt to these con-
ADAPTIVE IMAGE SENSOR SAMPLING FOR LIMITED MEMORY MOTION DETECTION
401

ditions as reflected in the F. delay values of Table 1.
Table 1: Timing information of the multi-core system. F.
delay is the frame delay used to increase exposure time.
Sen. ROI is the rate at which ROI frames are captured by
the sensor per second. Sys. ROI is the rate at which ROI
images actually pass through the entire system per second.
LCD and PC are the rate, in frames per second, at which
320 by 240 pixel images and 40 by 48 motion representa-
tions reach the LCD and PC (via ethernet) respectfully.
F.delay (µs) Sen. ROI Sys. ROI LCD PC
285 436 305 10.2 8.5
162 1442 489 16.3 15.3
113 1700 643 21.3 18.5
The Sensor ROI and System ROI values of Table 1
show the potential rate of ROI sensor capture and ac-
tual rate of ROI processing for the system. Clearly
the system cannot process image data at the sensor
ROI grabbing rate leaving the sensor to free run until
the system is ready to grab the next ROI. ROI transfer
times from the sensor to the system are 46µs and sen-
sor ROI programming times are 26µs. The LCD val-
ues show the 320 by 240 pixel frames per second rate
of output to the LCD and the PC values show the rate
at which 40 by 48 motion representations are received
by the host PC via the ethernet connection. The gaus-
sian filtering is computed in a naive manner and by
using the algorithms of (Wells, W. M., 1986) system
performance and functionality could be increased. It
should be noted that there has been no explicit optimi-
sation applied to the system software which is written
in the XMOS XC language, an extension of C. The
above timings are given as an initial report of results
and much more analysis is required to fully under-
stand the true performance of the system.
4 CONCLUSIONS
In this paper we have shown that by leveraging the
programmability of an image sensor, motion detec-
tion can be carried out at near standard frame rates at
an effective resolution of 320 by 240 pixels using a
single-core four thread processor with just 64KBs of
RAM. Further we have shown that by using a multi-
core architecture motion detection and various addi-
tional image processing can be carried out at near real
time rates at an effective resolution of 320 by 240 pix-
els using a distributed system with no more than four
unshared blocks of 64KB of RAM. It is expected that
with further development the proposed system will be
able to compute higher-level computer vision algo-
rithms such as optical flow (Barron, J. L. and Fleet,
D. J. and Beauchemin, S., 1994), point tracking (Shi,
J. and Tomasi, C., 1994), gesture recognition (Shot-
ton, J. and Fitzgibbon, A. and Cook, M. and Sharp,
T. and Finocchio, M. and More, R. and Kipman, A.
and Blake, A., 2011) and face detection (Viola, P.
and Jones, M. J. and Snow, D., 2005). Key contribu-
tions of this paper include leveraging the programma-
bility of modern image sensors and the use of high
frequency low power XMOS processors.
ACKNOWLEDGEMENTS
This work was sponsored by an EPSRC Knowledge
Transfer Secondment help by the Research, Enter-
prise and Development department of the University
of Bristol.
REFERENCES
Barron, J. L. and Fleet, D. J. and Beauchemin, S. (1994).
Performance of optical flow techniques. In Interna-
tional Journal of Computer Vision, volume 12, pages
43–77.
Davis, J. and Bobick, A. (1997). The representation and
recognition of action using temporal templates. In In-
ternational Conference on Computer Vision and Pat-
tern Recognition.
Lichtsteiner, P. and Posch, C. and Delbruck, T. (2007). An
128x128 120db 15us-latency temporal contrast vision
sensor. In IEEE Journal Solid State Circuits.
Shi, J. and Tomasi, C. (1994). Good features to track. In In-
ternational Conference on Computer Vision and Pat-
tern Recognition.
Shotton, J. and Fitzgibbon, A. and Cook, M. and Sharp, T.
and Finocchio, M. and More, R. and Kipman, A. and
Blake, A. (2011). Real-time human pose recognition
in parts from single depth images. In International
Conference on Computer Vision and Pattern Recogni-
tion.
Shraml, S. and Belbachir, A. N. (2010). A spatio-temporal
clustering method using real-time motion analysis on
event-based 3d vision. In International Conference on
Computer Vision and Pattern Recognition.
Viola, P. and Jones, M. J. and Snow, D. (2005). Detect-
ing pedestrians using patterns of motion and appear-
ance. In International Journal of Computer Vision,
volume 63, pages 153–161.
Wells, W. M. (1986). Efficient synthesis of gaussian filters
by cascaded uniform filters. In IEEE Transactions on
Pattern Analysis and Machine Intelligence, volume 8,
pages 234–239.
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
402
