
PAVEMENT TEXTURE SEGMENTATION USING LBP
AND GLCM FOR VISUALLY IMPAIRED PERSON
Sun-Hee Weon, Sung-Il Joo and Hyung-Il Choi
Department of Global Media, Soongsil University, Sangdo-dong, Seoul, South Korea
Keywords: Pavement Segmentation, LBP, GLCM, Texture Segmentation, Visually Impaired Person.
Abstract: This paper proposes about a method for region segmentation and texture extraction to classify pavement and
roadway region in the image that acquired from cameras equipped to the visually impaired person during a
walk. First, detect a road boundary line through the line detections technique using the Hough transform,
and obtain candidate regions of pavement and roadway. Second, extract texture feature in segmented
candidate region, and separated pavement and roadway regions as classified three levels according to
perspective scope in triangular model. In this paper, used rotation invariant LBP and GLCM to compare the
difference of texture feature that pavement with various precast pavers and relatively a roadway being
monotonous. Proposed method in this paper was verified that the analytical performance nighttime did not
deteriorate in comparison with the results from the daytime, and region segmentation performance was very
well in complex image has various obstacles and pedestrians.
1 INTRODUCTION
The rapid development of IT technology is
precipitating the contemporary transformation of
wired networks into wireless networks.
Concomitantly, research is actively underway to
develop various services using mobile terminal
devices such as PDAs, mobile phones, smart phones,
etc. which are adapted to the wireless network
environment, and furthermore, to develop wearable
computing devices and algorithms driven by various
forms of nanotechnology. Among these, vision
based systems are currently mainly applied for
augmented reality applications using smart phones
or navigations, etc. and numerous researches
relevant to these areas are ongoing amid heightened
international interest. However, the majority of such
related research work is focused only on systems for
use by non-disabled persons, while devices for
assisting disabled persons are not being taken under
consideration at present. Image processing and
computer vision technology is a field with very high
potential value for utilization as assistive devices for
the visually impaired. This is an important
technology for blind persons who had hitherto relied
on assistive walking sticks or guide dogs for walking,
offering the possibility of eliminating the risk factors
that may arise when such disabled persons walk
without separate guidance devices or guide persons.
Most of the systems which had been developed in
the past to serve as vision assistance devices that can
be worn by the blind employed ultrasonic sensors,
etc. to detect obstacles and transmit this information
to the user, and hence they were limited in their
capacity for information communication (Tuceryan
and Jain, 1993).
Moreover, they were also hampered by the
difficulty of identifying accurate information
regarding the situational conditions or the
environment during walking (Arvis et al., 2004).
This paper has developed a system for enabling
visually impaired persons to walk safely by using a
camera mounted onto mobile computers or smart
phones. Most of the pre-existing research into road
detection and recognition had been constituted of
efforts to develop applications for unmanned
vehicles or navigation, and hence priority was not
given to the subject of pavement detection and
recognition from the perspective of the pedestrian’s
position. Also, as can be seen in Fig. 1, pavements
are unlike roadways in that they are characterized by
a wide variety of patterns created by the paving
blocks, and they thus pose the problem that even the
same pattern may pose a high possibility of being
misrecognized depending on the perspective from
which its image is recorded.
335
Weon S., Joo S. and Choi H..
PAVEMENT TEXTURE SEGMENTATION USING LBP AND GLCM FOR VISUALLY IMPAIRED PERSON.
DOI: 10.5220/0003826903350340
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 335-340
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
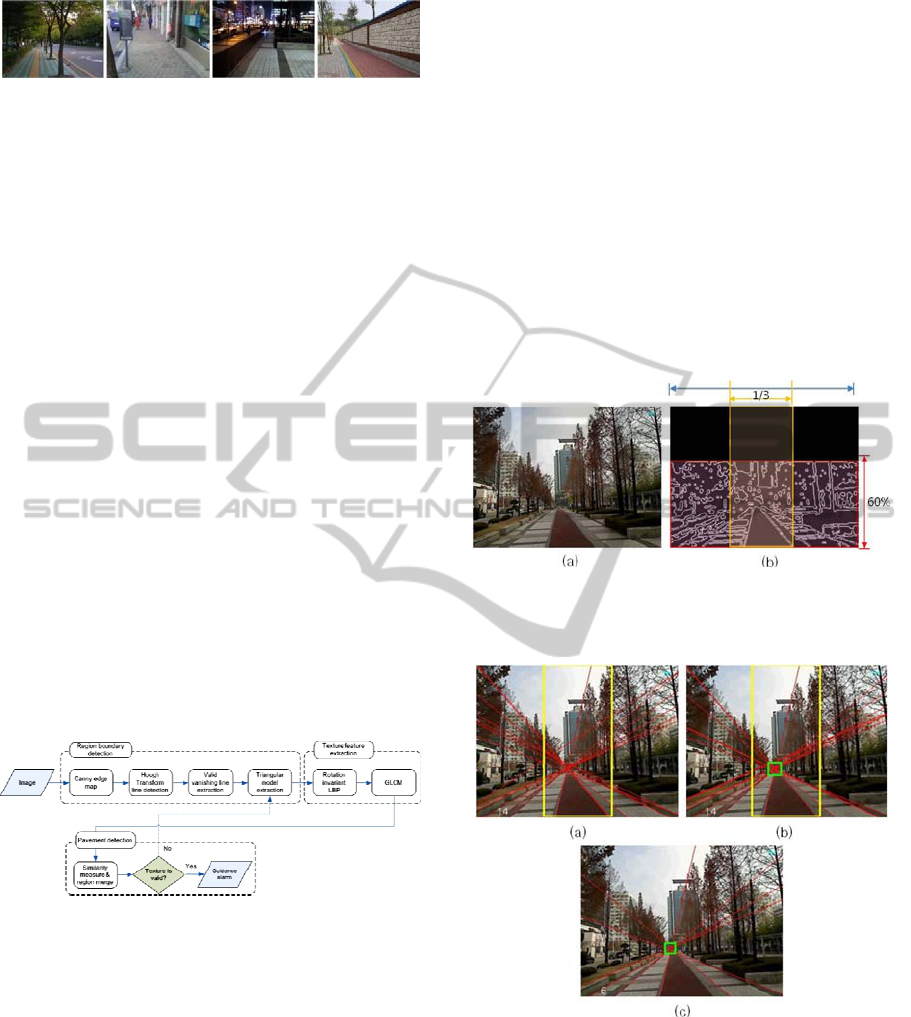
Figure 1: Different images configurations in the same
pavement situation.
To resolve the above problems, this paper proposes
a method of segmenting regions of the road using
LBP and GLCM, which are texture features
invariant under rotation. To distinguish the boundary
between roadways and pavement regions, the
optimal road line is detected using the Hough
transform, and this detected road line is used to
derive the Local Binary Pattern (LBP), the Gray
Level Co-Occurrence Matrix (GLCM) and the
texture feature information of the segmented regions.
Also, the segmented regions are distinguished into 3
stages of levels according to their distance, and the
similarity of the texture features between each of the
respective levels is measured, thereby distinguishing
the roadway and pavement regions.
Fig. 2 presents the proposed pavement detection
framework. The rest of this paper is organized as
follows: In section 2, we describe about step for
region boundary detection. Section 3 presents our
pavement detection method based on perspective
texture feature LBP and GLCM, and measure the
similarity between each level within triangular
model. Section 4 shows the experiment results and
finally, this paper concludes and discusses our future
research direction.
Figure 2: Pavement detection framework.
2 REGION BOUNDARY
SEGMENTATION
2.1 Road Boundary Detection
Within an outdoor natural image in which roadways
and pavements are simultaneously present, linear
components exist due to the numerous obstacles.
However, the road information conveyed by an edge
image obtained through a canny edge operator has
the characteristic of proceeding in the direction of
the center of the image. Also, when walking while
facing directly forward in accordance with the
characteristic manner of blind pedestrians, the road
is confirmed to be located within 60 % of the image,
and the pixel information for the upper 40 % can
then be eliminated. In order to secure edge detection
that sustains strongly under lighting and illumination,
first the edges for the specific RGB channels of the
input image are detected, and the noise is removed
using the logical disjunction (OR) operations and
morphological closing operations. Then the results
of the diagonal component edge detection are
obtained by means of the elimination of the
horizontal and vertical edge components. Fig. 3
shows the resulting image obtained in the edge
detection stage.
Figure 3: Resulting image obtained in edge detection step,
(a) original outdoor image, (b) canny edge detection result
within 60% of the image.
Figure 4: Process of detection for valid vanishing line, (a)
the candidate region for the location of the vanishing point,
(b) improved Hough line after eliminating invalid lines, (c)
optimal valid vanishing lines.
The Hough transformation algorithm is
performed to detect the boundary of the roads. Here,
the valid line is the diagonal component, and hence
the lines with slope of 20 or less are removed from
among all the extracted lines. In the natural image,
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
336
the pavement has a line parallel to the boundary
surface and the vanishing point (intersection point)
exists on the extension of the line according to the
perspective. The valid line for detecting the
boundary of the region is determined using these
features. Also, the line that is located on the
boundary of the pavement has a high probability of
existing within the vanishing block which has a size
of 20x20 and which is the candidate region for the
location of the vanishing point. Hence, lines for
which the vanishing point does not exist within this
region are judged to be invalid lines and are
eliminated. Fig. 4 displays the result of detecting the
optimal valid vanishing line component by means of
eliminating the invalid lines after generating the
vanishing block.
2.2 Region Split and Triangular Model
Extraction
The regions which have been separated by the valid
road lines are regarded as the primary interested
region. This paper designates all of these regions as
the triangular model, and the separated regions are
composed of an N number of small triangular
models. In these triangular models, the regions
which are determined to be identical by means of
similarity verification are merged in cases where
they lie adjacent. In the case of non-adjacent regions,
the respective surface areas are calculated so that the
regions which are smaller than the threshold value
can be submitted to a stage of elimination to extract
a single triangular model region. Fig. 5 shows the
small triangular model generated by separating the
extension lines of the valid lines of the pavement,
and the final triangular model merged though the
similarity verification stage.
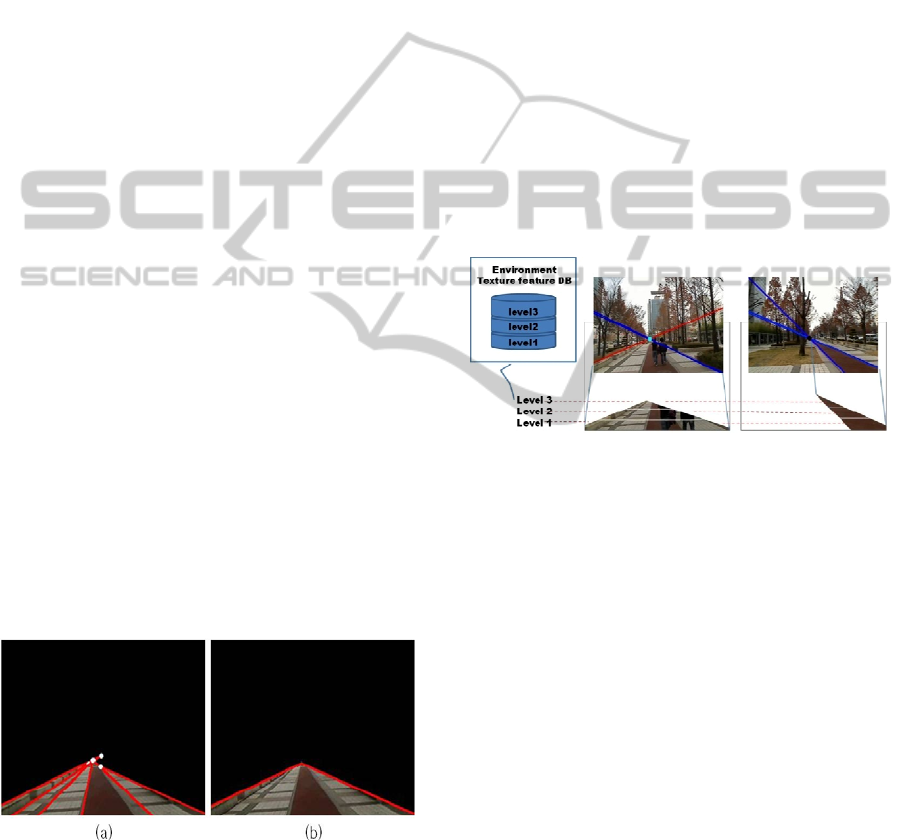
Figure 5: Separating the ROI and extracting a single
triangular model, (a) primary interested regions, (b) the
merged triangular model region.
3 TEXTURE FEATURE
EXTRACTION
3.1 Perspective Texture Feature
The extracted triangular model is segmented into 3
levels according to distance to derive the texture
information. This method is used to solve the
problem arising from the fact that the texture of
regions that are distant from the camera offer
relatively less quantities of information and are
inferior in clarity compared to the close regions. As
seen in Fig. 6, the close region is designated as level
1 and the distant region as level 3 to extract the
texture features for each respective level. Rotation
invariant LBP and GLCM are used to distinguish the
textures of the pavement and the roadway, and the
image is segmented into window blocks of size 8x8
for processing to extract more textural features from
the pattern.
Figure 6: Perspective level of triangular model.
To address the problem posed by the transformation
of the pattern of the paving blocks when the image is
rotated or repositioned by the pedestrian, the texture
features which hold up strongly under rotation are
extracted. The first feature utilized for this purpose
is the rotation invariant local binary pattern. The
derivation of the LBP follows that represented by
Ojala et al., g
corresponds to the gray value of the
center pixel of a local neighbourhood.
g
p0,⋯,P1
correspond to the gray values
of P equally spaced pixels on a circle of radius
RR 0 that form a circularly symmetric set of
neighbors.
Fig. 7 illustrates three circularly symmetric
neighbor sets for different values of P and R. And
then, a binomial weight 2
is assigned to each sigh
sg
g
, transforming the differences in a
neighbourhood into a unique LBP code :
LBP
,
x
,y
∑
sg
g
2
,
(1)
s
x
1x 0
0x 0
PAVEMENT TEXTURE SEGMENTATION USING LBP AND GLCM FOR VISUALLY IMPAIRED PERSON
337

Figure 7: Local Binary Pattern(LBP).
The rotation invariant local binary pattern applied in
this paper is one variant of the local binary pattern,
and uses equation (2) to submit the LBP code to a
circular rotation and generation is repeated until the
minimum value is obtained. In short, the rotation
invariant code is produced by circularly rotating the
original code until its minimum value is attained.
The LBPROT operator introduced by Pietikäinen et
al. (Vadivel et al., 2007) is equivalent to LBP
,
.
Rotation invariance here does not however account
for textural difference caused by changes in the
relative positions of a light source and the target
object. So, we extract another texture extraction
method to solve this problem using Gray level co-
occurrence matrix(GLCM).
LBP
,
minRORLBP
,
,i
|
i 0,1,…,P1 (2)
Haralick suggested the use of gray level co-
occurrence matrices (GLCM) for definition of
textural features. The values of the co-occurrence
matrix elements present relative frequencies with
which two neighboring pixels separated by distance
d appear on the image, where one of them has gray
level i and other j. Such matrix is symmetric and
also a function of the angular relationship between
two neighboring pixels. The co-occurence matrix
can be calculated on the whole image, but by
calculating it in a small window which scanning the
image, the co-occurence matrix can be associated
with each pixel. Haralick suggests 14 features
describing the two dimensional probability density
function p
,
. Four of the most popular commonly
used are listed in [Haralick 73] (Leitão et al., 2003).
They are Contrast, Correlation, Energy,
Homogeneity, and Energy and Homogeneity
features used to measure the uniformity of surface
texture in this paper.
Contrast
|
ij
|
p
i,j
,
(3)
Correlation
i
μ
i
μ
p
i,j
σ
σ
,
(4)
Energ
y
p
i,j
,
(5)
Homogeneit
y
pi,j
1
|
ij
|
,
(6)
3.2 Region Segmentation
The LBP and GLCM texture information of the
extracted triangular model is calculated to measure
the degree of similarity among the adjacent regions.
The regions are separated initially according to the
triangular model by merging the regions with high
degrees of similarity and removing the regions with
low similarity. By comparing the degrees of
similarity among the texture features within the
separated triangular model, analysis is performed on
the regions where the pavement and the roadway lie
adjacent or the regions that exceed the range of
recognition during walking. Through this analysis,
the secondary region is distinguished to guide the
walking movement. In the proposed method, the
local features which display the spatial information
of the images can be reflected with high quality by
comparing the respective pattern similarities of each
block unit within the triangular model as in equation
(7) as soon as the walking commences to measure
the similarity of the stored texture features of the
pavement and the query images that are input during
walking. In equation (7), L and CM are the
respective normalized values for the LBP and
GLCM blocks, and α and β are their respective
weighted values. The degree of similarity can be
compared by varying the weighted values according
to the information which is desired to be compared.
S
αLβCM, αβ1
(7)
Equation (8) represents the method for calculating
the similarity of the normalized LBP histogram
between the query image Q and the compared image
D. K is the number of bins, and N is the number of
road region models. In the current image, the
similarity between the LBP histogram and the stored
road region model is identified as S, and the road
model with the highest degree of similarity is
thereby detected.
S
minQ
m
,Dm
(8)
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
338
4 EXPERIMENT RESULTS
As for the image used for experiments in this paper,
images sized 320 x 240 were input and processed in
real-time. The average processing speed was
measured to be 18 frames per second. For the
experiment, outdoor images for both day and night
were recorded, and the resulting extractions of
texture features confirmed clear distinctions in
texture for pavements and roadways in both LBP
and GLCM. Fig. 8 presents the result of segmenting
the image into 8 x 8 window blocks and then
extracting the texture features of the valid blocks
located within the triangular model. It indicates that
while the unique pattern of the texture was able to be
extracted in the pavement regions, almost no
patterns could be extracted from the roadway
regions.
Fig. 9 exhibits the experiment using experimental
images in which the bicycle path and the pavement
region are adjacently located, wherein the bicycle
path was judged to be a roadway and the difference
in the texture features when compared with the
pavement region was sought. 3 stages of levels were
distinguished within the region which had been
segmented following the valid line, and the rotation
invariant LBP and GLCM were extracted for the
window blocks of each respective level identified
according to distance. In level 3, the number of
window blocks that remained valid was small and
this posed a difficulty in comparing texture features.
However, in the case of the bicycle path located in
the center of the image, it was confirmed that
sufficient extraction could be made of the texture
features to enable a comparison of similarity even in
level 3. Fig. 10 is the result of experiments on
images recorded in the nighttime. Because LBP and
GLCM utilize features which can express texture
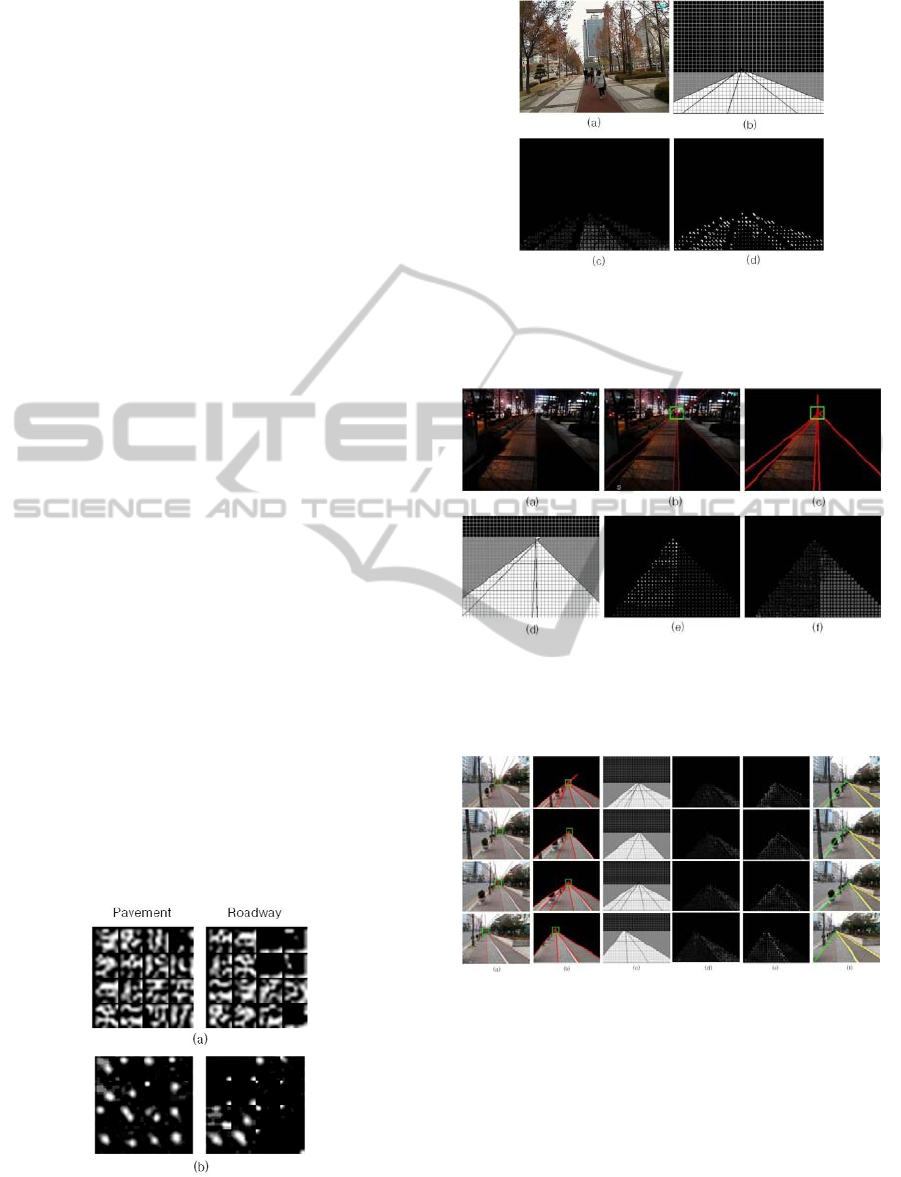
Figure 8: Texture feature of pavement and roadway, (a)
8x8 window blocks based rotation invariant LBP, (b) 8x8
window blocks based GLCM.
Figure 9: Result of texture feature extraction within
triangular model, (a) original image, (b) triangular model
based on 8x8 window, (c) rotation invariant LBP, (d)
GLCM.
Figure 10: Pavement detection result with night outdoor
image: (a) original image, (b) valid hough line, (c) and (d)
region of triangular model, (e) rotation invariant LBP in
(d), (f) GLCM in (d).
Figure 11: Process of texture feature extraction in real
time image: (a) valid hough line detection, (b) region of
triangular model, (c) separated according to 8x8 window
block (d) rotation invariant LBP in triangular model, (e)
GLCM in triangular model, (f) pavement and roadway
detection result.
features well regardless of the conditions of lighting
or illumination, it was verified that the analytical
performance did not deteriorate in comparison with
the results from the daytime. Also, Fig. 11 exhibits
the results of experiments in continuous frames and
PAVEMENT TEXTURE SEGMENTATION USING LBP AND GLCM FOR VISUALLY IMPAIRED PERSON
339

demonstrates that in this case, even if the distance
texture of level 1 failed to be detected, because the
quantity of texture information increased with the
passage of time, the pavement situation could be
determined by analyzing the texture in level 2.
5 CONCLUSIONS
This paper has proposed a probabilistic estimation
method based on the rotation invariant texture
features of LBP and GLCM as a method for
distinguishing pavements and roadway regions in
outdoor images. It was confirmed that pavement and
roadway regions could be separated using a
relatively simple form of similarity comparison
between the regions when processing images in real-
time using this method. However, because there is
exists a great variety in the patterns of paving blocks,
and because comparisons of similarity become
challenging when a pavement region with a differing
pattern is confronted, there are plans for additional
research with the objective of resolving such
problems by focusing on the stage of updating and
recognizing texture features in real-time.
ACKNOWLEDGEMENTS
This research was supported by the Converging
Research Center Program funded by the Ministry of
Education, Science and Technology (2011K000667)
and the Soongsil University BK21 Digital Media
Division.
REFERENCES
Tuceryan M., and Jain A. K., (1993) Texture Analysis, in:
C. H. Chen, L. F. Pau, P. S. P.Wang (Eds.), Handbook
of Pattern Recognition and Computer Vision, World
Scientific Publishing Co., Singapore, pp.235-
276(Chapter2).
Ojala T., Pietikäinen M., and Mäenpää T. (2002)
Multiresolution Gray-Scale and Rotation Invariant
Texture Classification with Local Binary Patterns,
IEEE Transactions on Pattern Analysis and Machine
Intelligence 24, pp. 971-987.
Turtinen M., and Pietikäinen M. (2003) Visual Training
and Classification of Textured Scene Images, The 3rd
International Workshop on Texture Analysis and
Synthesis, pp. 101-106.
Arvis V., Debain C., Berducat M., and Benassi A. (2004)
Generalization of the cooccurrence matrix for colour
images: application to colour texture classification,
Image Anal Stereol Vol.23, pp. 63-72.
Vadivel A., Sural S., and Majumdar A. K. (2007) An
Integrated Color and Intensity Co-occurrence Matrix,
Pattern Recognition Letters, Vol.28, pp. 974-983.
Palm C. (2004) Color texture classification by integrative
co-occurrence matrices, Pattern Recognition, Vol.37,
pp. 965-976.
Guo Z., Zhang L., and Zhang D. (2010) Rotation invariant
texture classification using LBP variance(LBPV) with
global matching, Pattern Recognition, Vol.43, pp. 706-
719.
Leitão A. P., Tilie S., Mangeas M., JTarel.-P., Vigneron
V., and Lelandais S. (2003) Road Singularities
Detection and Classification, ESANN’2003
Proceedings – European Symposium on Artificial
Neural Networks(Belgium), pp. 301-306.
Zwiggelaar R. (2004) Texture Based Segmentation:
Automatic Selection of Co-Occurrence Matrices,
Proceedings – 17th ICPR’04, Vol.01, pp. 588-591.
Jia K., Liu N., Wang L., and Cheng L. (2009) Pavement
Scene Interpretation and Obstacle Detection by Large
Margin Image Labeling, Invited Workshop on Vision
and Control for Access Space (VCAS) @ ACCV.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
340
