
SIERPINSKI JELLY
Iterated Function Systems as Elastic Bodies
Pawel Filipczuk
1
, Slawomir Nikiel
1
and Korneliusz Warszawski
2
1
Institute of Control & Computation Engineering, University of Zielona Gora, Podgorna 50, Zielona Gora, Poland
2
Faculty of Electrical Engineering, Computer Science and Telecommunication, University of Zielona Gora
Podgorna 50, Zielona Gora, Poland
Keywords: Fractals, Iterated Function System, Real-time Simulation, Animation.
Abstract: Relatively simple ideas of fractal geometry result in an infinite number of complex images and objects.
Fractals are used in computer graphics to increase visual fidelity of the vector models. Although derived
from dynamical systems, fractals are usually presented as static objects. The paper presents a new concept
of embedding physical description in the model of IFS (Iterated Function System). Dynamically changing
fractal structures offer better sense of ‘material’ than static images or key-framed animations. The model
can augment IFS attractors with the illusion of softness, weight and other material-related features. The
proposed model is flexible, deterministic and offers high rendering performance.
1 INTRODUCTION
We can observe tremendous upgrade in computer
graphics. Computing power of currently available
PCs and game consoles support real-time rendering
of high-resolution images. Image quality is still a
result of trade–off between geometry and
performance. Vector graphics is a core of 3D
computer simulation models (Hearn and Baker,
1997); (Heckbert, 1994). Shading algorithms add
visual details to the rendered scene. Fractals has
always been a source for procedural shaders, greatly
improving quality of images. There are fractal
models that perfectly describe some organic
structures (Prusinkiewicz and Lindemeyer, 1990).
Genetic Programming and fractals are also used in
shape grammar-based rendering (Glassner, 1989;
1992); (Mignonneau and Somerrer, 2000); (Sims,
1991). Most fractal models, however, are usually
presented as static structures. This is probably due to
their geometric complexity, easily consuming
available computation power. IFS proposed by
Barnsley were originally focused on application of
affine transformations to image analysis and
synthesis (Barnsley, 1993). They proved to be
enough flexible to be rendered even on limited-
resource mobile devices (Nikiel, 2007). IFS are part
of dynamic systems (Clempner and Poznyak, 2011);
(Di Trapani and Inanc, 2010), but their graphic
representations are rather static. Recent
developments of Super-IFS and IFS
homeomorphism open path to dynamical morphing
of flat images and textures (Barnsley, 2006).
Extension of classical IFS with a vector model along
with the purely deterministic rendering algorithm
enabled real-time IFS shape modelling (Nikiel,
2005). Adding non-scaling parameters such as a type
of vector object to the affine maps enhances the
process of fractal shape construction. Key-framed
and parameter-driven animations of IFS attractors
have also been discussed in literature (Barnsley,
2006). Adding physical description to IFS model
offers quite new interaction and simulation
properties. Fractals behave ‘naturally’ reacting to
gravity and deformations in realistic manner. IFS
attractors can be elastic bodies. User can interact
with them the same way as with their real-life
counterparts.
The paper is organized as follows: First Section
describes theoretical background of the model
including necessary precautions to determine the set
of IFS functions. Then the IFS with embedded
physics model is described. It is followed by
presentation and discussion on real-time rendering
and simulation. Concluding remarks sum up
advantages of the proposed method. Directions for
further developments are indicated at the end of the
paper.
361
Filipczuk P., Nikiel S. and Warszawski K..
SIERPINSKI JELLY - Iterated Function Systems as Elastic Bodies.
DOI: 10.5220/0003829803610364
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2012), pages 361-364
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 ITERATED FUNCTION
SYSTEMS
2.1 Background
The Iterated Function Systems theory defines
mathematically some concepts of chaos and
irregularity in geometry. Research done mainly by
Barnsley led to significant new methods for image
understanding (Barnsley, 1993; 2006). A basic set of
tools for image construction is created through a set
of simple geometric transformations. IFS are based
on mathematical foundations laid by Hutchinson. An
IFS fractal is constructed from a collage of
transformed copies of itself. The transformation is
performed by a set of affine maps. An affine
mapping on a plane is usually a combination of
rotation, scaling and translation in R
2
. There are no
particular conditions imposed on the maps except
their contraction (Falconer, 1990).
A set of affine transformations is accompanied
by respective contraction factors. They are relatively
easy to estimate for classical linear two-dimensional
IFS. When all contraction factors are less than 1 the
IFS are called to be hyperbolic IFS. If each mapping
has a specific measure assigned a probability IFS are
called IFS with probabilities. Probabilities can be
proportional according to Jacobians of
transformation matrices. Proper adjustment of
probability according to a given contraction factor
enhances the rendering process. The average
contraction suggests that even non-hyperbolic and
non-linear IFS can posses their constant points,
called the attractors. Estimation of the contraction
factor for non-linear IFS is not trivial (Skarbek,
2006). It is often a matter of trial and error process
to check the existence of the IFS attractor. If we
consider an IFS to be a hyperbolic and linear, then
the situation is quite safe. We will always obtain the
image of the IFS attractor. With the help of the
Collage Theorem it is possible to design
interactively nature-like images and shapes.
2.2 IFS with Physics
First implementations of the IFS used binary images
and were rather inefficient. There have been many
improvements made over the IFS models and
alternative fractal rendering methods. IFS
(Partitioned IFS) and VRIFS (Vector Recurrent IFS)
are incorporated in fractal image compression and
decompression schemes (Barnsley, 1993). Polar IFS
along with Genetic Programming is a very
interesting alternative targeted at inverse problem:
how to find IFS set for a given image (Collet et al.,
1999). Adding color-space to the IFS codes
enhanced the process of colorization of fractal
models (Nikiel, 1998). In the field of rendering
methods, Dubuc and Elquortobi recognized that only
new points of the IFS attractor are necessary to
visualize the attractor (Dubuc, 1990). Monroe and
Dudbridge developed an optimized version for on-
screen display of IFS images, called the Minimal
Plotting Algorithm (Monroe and Dudbridge, 1995).
Bell proposed a recursive rendering scheme called
Tesseral Synecdoche Algorithm (Bell, 1995); (Bell
and Holroyd, 1991). Vector Recursive Rendering is
another algorithm that can be used to transform an
arbitrary set of points in n-dimensional spaces
(Nikiel, 2005). Considering above-mentioned
developments and purely deterministic character of
some IFS models it is possible to render their
attractors in real time. This enables interaction and
animation of IFS fractals. There have been many
attempts to use key-framed or parameter-driven
animations (Barnsley, 2006). Adding physical
description to IFS model opens quite new ways of
interaction and simulation. Fractals behavior might
be sensitive to deformations, gravity or other kind of
forces.
Let (F, d) be a complete metric space. Let F→F
be a collection of mappings (ω
i
; i=1,2,…,L)
operating on points (p) in F, then the
Ω=(F, (ω
i
); i=1,2,…,N) (1)
is called the Iterated Function System. An affine
transformation ω
i
scaling and translating points (p)
in R
3
has the form, and can be treated as a
transformation matrix M
T
:
11000
00
00
00
'
z
y
x
ts
ts
ts
PMP
zz
yy
xx
T
(2)
where (t
x
, t
y
, t
z
) determine translations and (s
x
, s
y
, s
z
)
determine scaling. A 2D example of such IFS model
might be Sierpinski triangle built with three
transformations. The IFS described above can be
treated then as an elastic body by using classical
physical formulas to define its behavior. Fractal
objects can be influenced by external forces of
gravity and wind. They can also collide with each
other as well as with other objects or with the
ground.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
362
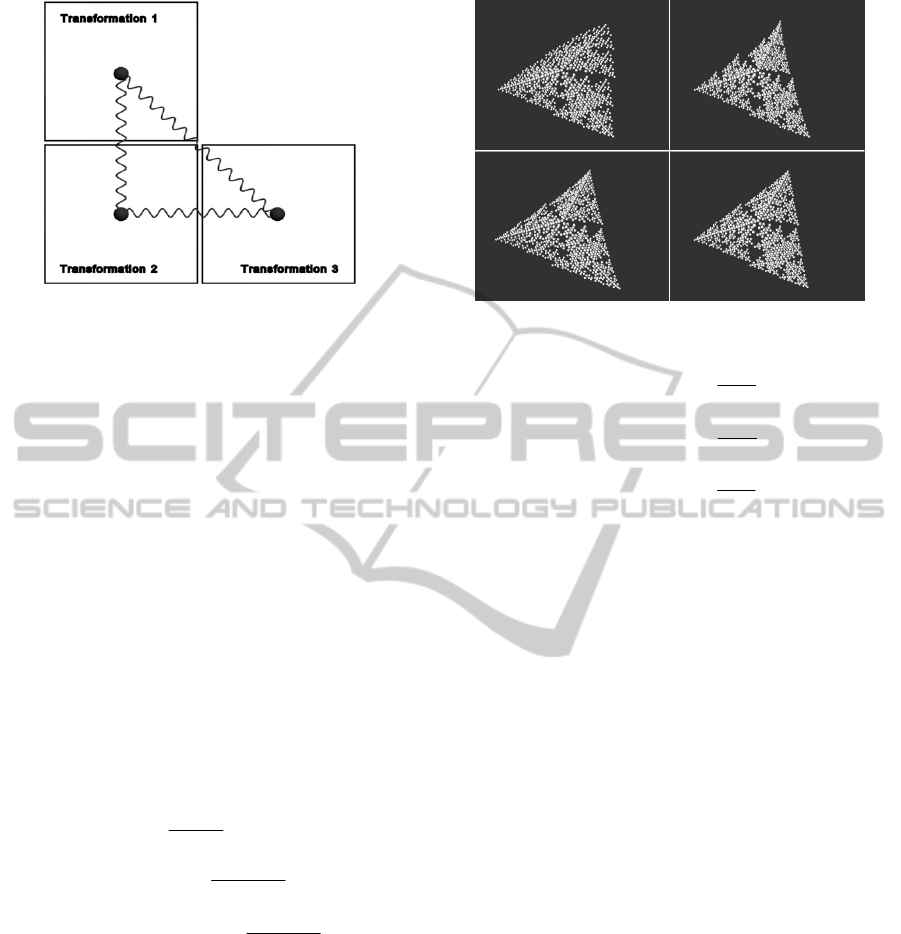
Figure 1: The model of IFS representing rigid bodies
connected with springs.
Fig. 1 depicts an example, in which transformations
are treated as rigid bodies connected by springs (for
the model defined by Eq. 2). Spring forces are
calculated using following formula:
bvstretchkFFF
dampingspring
(3)
where k is the spring stiffness coefficient, stretch is
the difference between neutral length of the spring
and its current length, b is the dumping coefficient
and v is a relative velocity between both ends of the
spring. The resultant force F
resultant
acting on objects
is a sum of forces of connected springs and other
forces like gravity, wind, etc. In the example
presented in this paper, simple Euler integration
method have been used.
Let P=[t
x
, t
y
, t
z
] represent a position of the fractal
object. Then, following formulas describe new value
of P after time:
m
F
a
resultant
m
tF
vtavv
resultant
'
t
m
tF
vPtvPsPP
resultant
''
(4)
where v is velocity and m is mass of the object. Final
transformation used in the IFS to generate the object
in current frame of simulation depends on forces
acting on it, time between the current and the
previous frame, on its mass and on previous position
and velocity. Final transformation matrix based on
Eq. 2 can be described by:
Figure 2: A few screens from the simulation.
1000
100
010
001
t
m
tF
vP
t
m
tF
vP
t
m
tF
vP
M
z
zz
y
yy
x
xx
T
(5)
It is possible to apply this method to other
transformations, like scaling, rotation or skew but
their physical interpretation is less obvious and
could not be explained directly as for translation.
Final transformation set used in our prototype
application consists of all these transformations and
is calculated as follows:
TRCRRCS
MMMMMM
1
(6)
where M
S
is scaling, M
R
is rotation, M
T
is translation
and M
RC
is the center of rotation matrix.
2.3 Rendering Algorithm
The physical IFS objects are rendered with vector
recursive rendering (VRR) (Nikiel, 2005). It
provides fast and deterministic way to calculate
structure of the object. According to the VRR
algorithm set transformations are used N times on
initial point to estimate fractal attractor. The final set
of points might be drawn directly on the screen or
rendered as coordinates of billboards or CSG sets.
The amount of physical calculations depends on the
number of transformation, not on N or the final
complexity of the object.
A deterministic rendering scheme is necessary to
construct physics-based three-dimensional fractals.
Either Tesseral Synecdoche Algorithm or Vector
Recursive Rendering Algorithm can be adapted to
handle the model described in the previous Section.
SIERPINSKI JELLY - Iterated Function Systems as Elastic Bodies
363

3 IMPLEMENTATION
The simulation and rendering procedure was
implemented using C++ and DirectX API. The
application delivers full structure in real-time. The
overall performance is very fast and some of the
operations may be performed at the GPU. The scene
was composed of 256 geometric objects, which
contained 10,752 vertices and 20,480 faces all
together. Average efficiency was about 165 FPS.
Without rendering it was about 780 FPS. The
prototype application was running on AMD Athlon
64 3000+ (1.8GHz) with ATI Radeon X700Pro
graphics card. Fig. 2. presents sample screens from
the simulation.
4 CONCLUSIONS
The developments described in the paper broaden
the application area of fractal modeling in three
dimensional vector graphics with the idea of
physical behavior of fractals. It opens up even more
possibilities to create artificial objects. When
simulated or interactively manipulated, physics-
based IFS attractors acts ‘naturally’ showing their
mass (inertia) or elasticity (they behave like jelly,
strings, plants or fur). The model presented in the
paper is relatively simple and provides real-time
interaction. It changes appearance of fractals from
complex static images to dynamically changing
structures. It is possible to describe IFS physics in
more advanced way, including collision detection.
Transformations might influence each other with
gravity or electromagnetic field instead of springs.
That would simulate objects like galaxies or atoms.
Considering plants, the hierarchical structure might
be used.
REFERENCES
Barnsley, M. F., 2006. Superfractals, Cambridge
University Press, N.Y.
Barnsley, M. F., 1993. Fractals Everywhere, 2nd Edition,
San Diego, CA, Academic Press.
Barnsley, M. F., 1993. Fractal Image Compression,
Wellesley, MA, Academic Press.
Bell, S. B., 1995. Fractals: A Fast, Accurate and
Illuminating Algorithm, Image and Vision Computing,
13(4), 253-277.
Bell, S. B., and Holroyd, F. C., 1991. Tesseral
Amalgamators and Hierarchical Tilings, Image and
Vision Computing, 9(5), 313-328.
Clempner, J. B., Poznyak A. S, 2011. Convergence
method, properties and computational complexity for
Lyapunov games, AMCS, Vol. 21
Collet, P., and Lutton, E. et al. 1999. Polar IFS and
Individual Genetic Programming, Technical Report,
INRIA Research Reports.
Di Trapani, L. J., Inanc T., 2010. NTGsim: A graphical
user interface and a 3D simulator for nonlinear
trajectory generation methodology, AMCS, Vol. 20
Dubuc, S., 1990. Approximations of Fractal Sets, J.
Computational and Applied Math., 29, 78-89.
Falconer, K., 1990. Fractal Geometry, Mathematical
Foundations and Applications, New York, John
Wiley&Sons.
Glassner, A. S., 1989. An Introduction to Ray Tracing,
San Diego, CA, Academic Press.
Glassner, A. S. 1992. Geometric Substitution: A Tutorial,
IEEE Computer Graphics and Applications, 12(1), 22-
36.
Hearn, D. and Baker, P., 1997. Computer Graphics C-
Version, Upper Saddle River, New Jersey, Prentice
Hall.
Heckbert, P., 1994. Graphics Gems IV, London, Academic
Press.
Mignonneau, L., and Sommerer, Ch., 2000. Modeling
Emergence of Complexity: The Application of
Complex System and Origin of Life Theory to
Interactive Art on the Internet, Artificial Life, Proc. of
the 7th Int. Conf. on Artificial Life, Cambridge, MA,
MIT Press, 547-554.
Monro, D. M., and Dudbridge, F., 1995. Rendering
Algorithms for Deterministic Fractals, IEEE Computer
Graphics and Applications, January 1995, 272(17),
32-41.
Nikiel, S., A Proposition of Mobile Fractal Image
Decompression, AMCS, Vol. 17, No. 1, 129-136.
Nikiel, S., 2005. Integration of Iterated Function Systems
and Vector Graphics for Aesthetics, to be published in
Computers&Graphics, 30(2).
Nikiel, S., 1998. True-color Images and Iterated Function
Systems, Computers&Graphics, 22(5), 635-640.
Prusinkiewicz, P. and Lindemeyer, A., 1990. The
Algorithmic Beauty of Plants, New York, Springer
Verlag.
Sims, K., 1991. Artificial Evolution for Computer
Graphics, Computer Graphics, 25(4), 319-328.
Skarbek, W.: On Convergance of Affine Fractal
Operators, Image Processing and Communications,
Vol. 1, No. 2, 33-41
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
364
