
LEARNING BY OBSERVATION IN SOFTWARE AGENTS
Paulo Costa and Luis Botelho
Instituto de Telecomunicac¸˜oes/ISCTE-Instituto Universitario de Lisboa, Lisbon, Portugal
Keywords:
Machine learning, Learning algorithms, Learning by observation, Software image, Software agents.
Abstract:
In a society of similar agents, all of them using the same kind of knowledge representation, learning with
others could be achieved through direct transfer of knowledge from experts to apprentices. However, not all
agents use the same kind of representation methods, hence learning by direct communication of knowledge is
not always possible. In such cases, learning by observation might be of key importance. This paper presents
an agent architecture that provides software agents with learning by observation capabilities similar to those
observed in superior mammals. The main contribution of our proposal is to let software agents learn by direct
observation of the actions being performed by expert agents. This is possible because, using the proposed
architecture, agents may see one another.
1 INTRODUCTION
Learning by observation is one of the most powerful
socialisation mechanisms for superior mammals and
also one of the most important means of knowledge
acquisition (Ramachandran, 2003; Bandura, 1977;
Meunier et al., 2007). The capacity to observe and
imitate the movements of others is among the least
common and most complex forms of learning (Moore,
1992). Research in neurology and psychology shows
that learning by observation may well be one of the
causes of the exponential growth of human capabili-
ties in the last centuries (Ramachandran, 2006).
Learning by observation can be classified un-
der the human and superior animals social inter-
action mechanisms. Bandura’s social learning the-
ory emphasizes the advantages of learning by obser-
vation (Bandura, 1977). Dautenhahn (Dautenhahn,
1994) claims that some intellectual capacities evolve
out of the social domain. Animals and humans take
benefit from the experiences of others by learning
what they observe from them.
This provides motivation for further research on
adapting a similar learning mechanism for software
agent societies. Learning by direct observation of
the expert agent performing its actions (as opposed to
merely relying on observing their effects) can be ad-
vantageous in situations where the effects of those ac-
tions are not directly visible in the environment (e.g.
communication between agents), when the represen-
tation of world states requires too much memory mak-
ing it impossible to know the effects of all actions
(e.g. social simulations with multiple interactions), in
situations in which the same effects could be achieved
by different alternative actions but using one of them
is clearly better than using others (e.g. using a set of
sums instead of a simpler multiplication), and espe-
cially when the agent does no know the effects of its
actions (e.g. virtual character manipulation).
Learning by observation is also advantageous for
knowledge transmission between agents developed
with different programming languages and also be-
tween software and robot agents. Using learning by
observation it is possible to make robot agents learn
by observing a software simulated version of them.
We propose a software agent architecture pro-
viding learning by observation capabilities similar to
those of superior mammals. This architecture allows
apprentice agents to acquire control rules through the
observation of an expert agent in action. In this paper,
we focus on the learning by observation algorithm
that is part of the proposed architecture. The algo-
rithm depends on the agent software image (Costa and
Botelho, 2011) as a means to identify similar agents
and to observe those agents as they act. The observed
agent software image provides apprentices with the
necessary training sequences for their learning algo-
rithms. It also supplies the necessary means to evalu-
ate the acquired knowledge.
We have tried two learning by observation ap-
proaches. The memory based approach uses the ob-
served data to create sequences of actions that are
276
Costa P. and Botelho L..
LEARNING BY OBSERVATION IN SOFTWARE AGENTS.
DOI: 10.5220/0003834502760281
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 276-281
ISBN: 978-989-8425-96-6
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

applied to specific circumstances. The mirror based
approach uses machine learning algorithms, trained
with data from expert observations, to determine the
correct behaviour for the perceivedenvironment state.
Apprentices take the observed expert behaviours as if
they were their own, enabling an easier identification
of the observed actions.
Since our memory based approach has not been
completed, the experimental results focus on the mir-
ror based approach. These results show that the best
suited algorithms for the mirror based approach are
KStar (classification algorithm) and NNGE (rule as-
sociation algorithm). Results also show that after a
few observations, apprentices are able to learn the cor-
rect behaviours for a large set of environment states.
The results also seem to show that, for certain kinds
of problems, learning by observation is advantageous
over other learning methods.
The next section presents a survey of research on
learning by observation. Section 3 presents a descrip-
tion of the learning by observation algorithm. The
results of initial tests made on the learning algorithm
are presented in section 4. Section 5 presents conclu-
sions and future work.
2 RELATED WORK
Learning is an essential characteristic of intelligent
beings. A computer program is able to learn if its
performance on a set of tasks improves with experi-
ence (Mitchell, 1997). Learning algorithms can be
organized in two types: supervised learning and un-
supervised learning.
Supervised learning creates mappings between in-
puts and outputs, whose correct values are provided
by a supervisor, which is usually a person. Supervi-
sors can interact directly with the learner agent pro-
viding the necessary training sequences for the learn-
ing algorithm or building a reward system that com-
pensates the agent each time it chooses the correct ac-
tion. Unsupervised learning determines how a dataset
is organized. These algorithms try to find regularities
in the input data to extract knowledge from them (Al-
paydin, 2004).
Several authors (Argall et al., 2009; Billard and
Dautenhahn, 1999) define learning by observation as
a subset of supervised learning, where policies are
generated by observing, retaining and replicating the
behaviour executed by an expert. Meunier and his
colleagues (Meunier et al., 2007) proved that the use
of learning by observation in rhesus monkeys im-
proved the learning speed when compared with other
types of learning such as trial and error.
The application of learning by observation tech-
niques in robot and software agents opens the learning
process to experts other than robot or software agents.
It enables the creation of an intuitive communica-
tion medium between humans and computers (Argall
et al., 2009).
Research in learning by observation is usually as-
sociated to robotics. Since software agents are usu-
ally not visible to themselves and to others, they
are mainly restricted to observing the effects of ac-
tions, instead of the actions themselves (Kerstin et al.,
1999). Software agent learning algorithms are often
directed to the use reinforcement learning techniques,
which in turn are learning methods that rely exclu-
sively on environment observations.
One of the main causes of the lack of learning by
observation of actions in software agents is the ques-
tion on how to represent those actions when they have
no physical body to make them visible (Kerstin et al.,
1999). To overcome this problem, we have developed
and integrated the software image into our agent ar-
chitecture (Costa and Botelho, 2011). The software
image is a mechanism through which software agents
can observe their bodies and actions.
According to Argall and her colleagues (Argall
et al., 2009) two aspects must be taken into account
when building a learning by observation solution:
gathering and interpreting examples from the expert
agent and deriving a policy from those examples. The
software image takes care of the first aspect, the pro-
posed learning algorithm relates to the second aspect.
Policy derivation can be achieved through several ap-
proaches. Our approach uses classification algorithms
and policy representation as a sequence of behaviours.
Classification algorithms categorize and group
similar perceptions and behaviours. In these cases
the policy is derived by mapping perceptions to be-
haviours. This is best suited when environment states
change at random and behaviours do not depend on
each other (i.e. learning a package routing algorithm).
Representing the policy as a sequence of be-
haviours provides apprentices with the necessary
steps to go from one state to the goal state. It is best
suited for situations where behaviours are correlated
and a chain of events can be determined (i.e. learning
a sort algorithm).
Other approaches for learning by observation take
inspiration from neurological research of brain struc-
tures such as the mirror neurons. They allow ob-
servers of some action to feel almost the same as
if they would if they have performed it, providing
the means for easy action identification (Ramachan-
dran, 2006; di Pellegrino et al., 1992; Rizzolatti et al.,
1996).
LEARNING BY OBSERVATION IN SOFTWARE AGENTS
277
According to Demiris and Hayes (Demiris and
Hayes, 2002), research in human brain and mirror
neuron activation suggests that learning by observa-
tion allows the apprentice to put itself in the experts
place. To understand the observed behaviour, appren-
tices generate several alternatives before the observa-
tion process is finished, allowing them to improve the
quality of response.
Based on these facts, Demiris and Hayes proposed
a biologically inspired computationalmodel for learn-
ing by observation. They used forward models to
create estimates for specific behaviours regardless of
their source (observed or generated by the appren-
tice). Forward models allow the apprentice to pre-
dict the next state without actually performing the be-
haviour. In a sense, they allow the apprentice to gen-
erate and test a set of possible behaviours without af-
fecting the environments state (Demiris and Hayes,
2002).
A similar approach is used in our learning algo-
rithm. A mirror mechanism provides agents with the
ability to generate a set of possible behaviours for a
given state, retrievedfrom observation or from the ap-
prentices perception. Instead of using estimations and
forward models, the possible behaviours are evalu-
ated, providing the apprentice with quality measures.
Evaluation is an important feature in learning by
observation since it allows the apprentice to know its
ability to accomplish the goal. Evaluation can be as-
sisted or unassisted. Milstein and her colleagues real-
ized that, unlike humans, chimps and gorillas do not
get assisted by their parents when learning new tasks.
They have to resort to trial and error to perfect the
learnt skills (Milstein et al., 2008).
The use of guidance from an expert is a singular
feature in learning by observation amongst humans.
This interaction allows the apprentice to ask for guid-
ance whenever it has doubts on the actions to take.
This provides us great advantages over trial and error.
Our learning algorithm allows the use of both assisted
and unassisted evaluation, since assisted evaluation
requires the use of specialized experts, the teachers,
which might not be always available.
3 LEARNING BY OBSERVATION
ALGORITHM
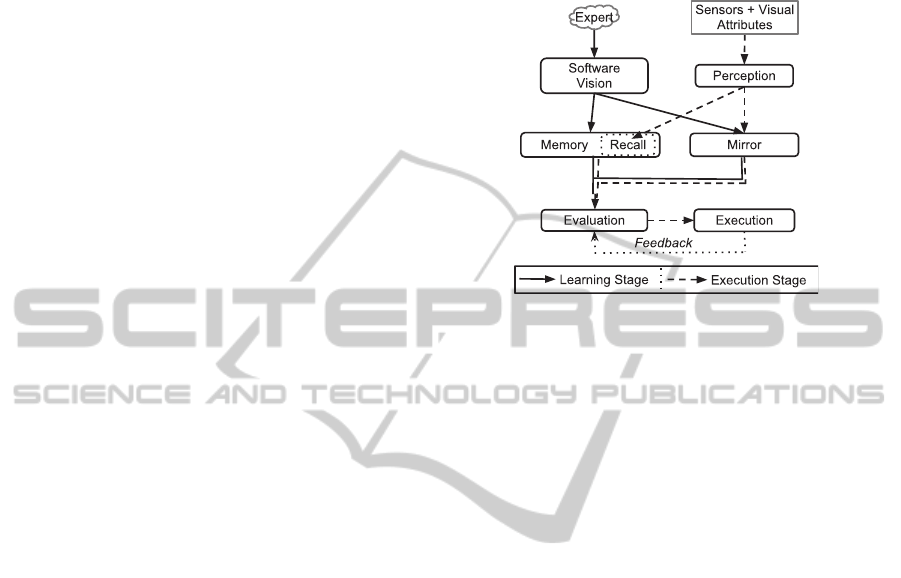
The learning by observation algorithm follows a mod-
ular design, operating in two stages: the learning
stage and the execution stage. The learning stage in-
cludes observation, storage, reflection and evaluation
of behaviours. The execution stage includes the ap-
plication and evaluation of the learnt skills.
Each of the learning algorithm’s modules ad-
dresses a specific task in the learning process. Fig-
ure 1 shows how these modules are arranged and how
information flows at each stage.
l
Figure 1: The learning modules.
As figure 1 shows, the memory, mirror and evalu-
ation modules participate in both learning and execu-
tion stages. The learning stage begins in the software
vision module with the location and observation of a
similar expert. The execution stage begins in the ap-
prentice’s sensors with the acquisition of the appren-
tice’s perception.
Evaluation represents the last step for both learn-
ing and execution stages. This is an important fea-
ture since it ensures the apprentice’s learning quality.
Evaluation is a continuous process, allowing the ap-
prentice to go back to the learning stage whenever it
is necessary.
The evaluation process influences the apprentice’s
confidence level. Confidence is an internal quality
measure that allows switching between the learning
and execution stages. When confidence is under a cer-
tain threshold the algorithm is on the learning stage,
above that threshold the algorithm is on the execution
stage.
3.1 The Learning Stage
The software vision module providesapprentices with
the necessary tools to observe experts. It makes use
of a special property that allows experts and appren-
tices to describe their capabilities and perceptions, the
software image (Costa and Botelho, 2011). The vi-
sion module focuses the apprentices attention on ex-
perts that can be imitated (whose static image is con-
tained in the apprentice’s static image). The expert’s
dynamic image provides apprentices with the expert’s
behaviour and perception as snapshots.
Software vision converts this information into ap-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
278

prentice experiences by replacing all references to ex-
pert structures in the snapshot with references for the
corresponding apprentice’s structures. This conver-
sion allows apprentices to use the experts state de-
scription and behaviour as if they were their own.
Software vision is able to read both current and
historical information on what the agent is doing and
what were the conditions holding just before it has
done each action. Apprentices are able to load a lim-
ited amount of snapshots from earlier times. Each
time an apprentice starts observing a new expert it
reads its historical data and, only after that, it starts
collecting snapshots of on-going behaviour.
Two approaches are used to handle data obtained
from observation of an expert’s software image. The
memory approach focuses on storing and recalling the
observed snapshots according to their place in time.
The mirror approach focuses on making the act of
observing an expert to produce the same effects as
preparing for executing those actions.
The memory approach uses the memory mod-
ule to store observed snapshots and provide solutions
for perceived environment states. As it is the case
in superior mammals procedural memory, the mem-
ory module stores each snapshot as a chain of steps.
These are later recalled, by the recall mechanism, and
used as reference paths for moving from one envi-
ronment state to another. Thus the memory module
is able to provide a set of possible behaviours for
the currently perceived state through association with
previously executed behaviours.
The mirror approach uses the memory module to
store observed snapshots and the mirror module to
provide solutions for perceived environment states.
For the mirror module, like in mirror neurons, the
act of observing an expert produces the same effects
as preparing for executing those actions. The mirror
module uses a collection of machine learning algo-
rithms, such as KStar (classification), ID3 (decision
trees), Naive Bayes (Bayesian networks) and NNGE
(rule association), that are trained with the data stored
in the memory module to build a list of possible be-
haviours from an environment state. Environment
states can come from both agent perception or ex-
pert observation, as they are treated in the same way.
Developers are free to use any of the algorithms but,
as section 4 shows, KStar and NNGE are the best
choices.
The apprentice’s choice between these two ap-
proaches involve the use of a weight mechanism. The
memory and mirror modules are fitted with weight
factors that enhance the apprentices adaptability to
different learning circumstances. Each time a module
produces a solution that, through evaluation, is proven
to be the appropriate one, the module’s weight is in-
creased.
In the learning stage, evaluation happens each
time the apprentice makes an observation. For each
observed snapshot, the apprentice produces a solution
for the environment state described in the snapshot.
This solution is compared, in the evaluation module,
with the behaviour provided by the snapshot to deter-
mine if the apprentice is making the correct choices.
Apprentice confidence increases whenever the ap-
prentice’s solution matches the behaviour provided by
the snapshot. When that is not the case, the appren-
tice’s confidence decreases.
3.2 The Execution Stage
In the execution stage the apprentice’s perception is
used as input for the mirror module and the recall
mechanism. Each of these modules produce a solu-
tion according to the underlying approach (mirrror or
memory approach). The execution module picks the
most fitted solution from the module with the highest
weight value. If the solution has a positive evaluation
the execution module carries out with execution.
The execution module is only activewhen the con-
fidence level is above a certain threshold. Bellow that
threshold the agent is unable to perform any action, it
only has the ability to observe. Execution makes the
necessary arrangements to call the actions required
for the solution. Throughout execution, a special
mechanism collects information on the problems and
achievements that might be encountered. This mech-
anism is responsible for providing the feedback to the
evaluation module.
Evaluation in the execution stage follows two di-
rections depending on the existence of a special kind
of expert, the teacher. If teachers are available the ap-
prentice is able to evaluate directly the provided so-
lution through teacher appraisal. The apprentice asks
the teacher if its solution is correct and if the teacher
answers positively the apprentice’s confidence in-
creases. If the answer is negativethe apprentice’s con-
fidence decreases and the solution is not executed.
When no teachers are available, evaluation only
produces an outcome after execution. Whenever a
problem is found when executing the solution or the
apprentice realizes that it has made a step back (e.g.
needs to re-achieve a sub-goal), evaluation decreases
the apprentice’s confidence level. If, by any chance,
the execution provides some type of reward, like for
example the achievement of a sub-goal, evaluation in-
creases the apprentice’s confidence. In all other cases,
confidence cannot be changed since it is not possible
to assume if the solution was the appropriate one.
LEARNING BY OBSERVATION IN SOFTWARE AGENTS
279
4 EXPERIMENTAL RESULTS
In this section, we describe an experiment on the mir-
ror approach that tests the capabilities of several ma-
chine learning algorithms in learning by observation
environments. These algorithms are used by the ap-
prentice’s mirror module to provide solutions for the
perceived environment states. With this experiment
we intend to see what types of algorithms are best
suited for the mirror approach and how agent com-
plexity affects the algorithm’s performance.
A test framework was developed to allow the cre-
ation of small test scenarios involving a single expert
and a single apprentice agent. In this framework, the
environment state is described by four variables with
a limited set of possible values: two numerical, one
string and one enumerate. Expert agents react to con-
trolled changes in the environment state, executing
specific behaviours when specific combinations of the
four environment variables are presented.
Table 1 presents the agent features in two of the
tested scenarios. They allow us to see how the num-
ber of rules influences the learning efficiency. The
complexity of agent behaviours rises with the num-
ber of rules used to describe them. When the number
of rules increases, an increase in the time required to
observe an expert is expected, since learning by ob-
servation works efficiently when apprentices observe
a wide range of possibilities.
Table 1: Agent features for the test scenarios.
Scenario Parts Sensors Actions Rules
1 1 2 4 4
2 1 3 5 10
Both scenarios present a total of 100 apprentice
observations (meaning the expert is presented with
100 different environment states). For each observa-
tion the apprentice stores the observed snapshot and
calculates the proper behaviours for a set of ten dif-
ferent environment states. Apprentice behaviours are
calculated by a specific algorithm in the mirror mod-
ule. The algorithm makes use of the previously ob-
served snapshots as train sequences.
Apprentice behaviours are compared with the cor-
rect responses to determine how the number of ob-
servations influences the apprentice’s accuracy rate.
The accuracy rate determines the number of correct
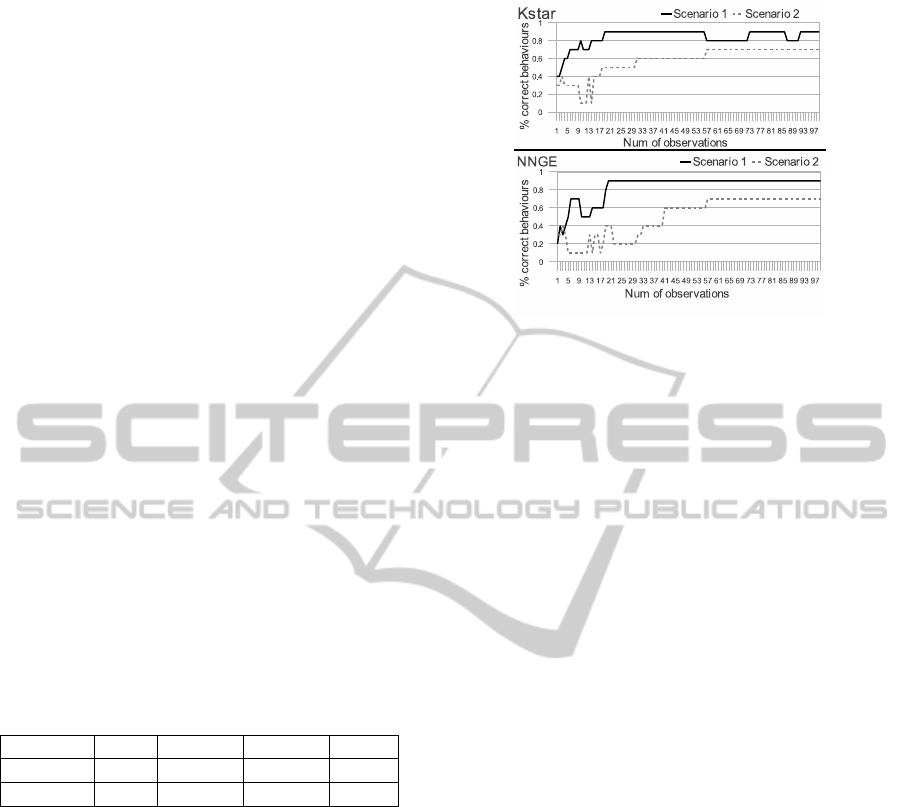
behaviours of the ten performed. Figure 2 presents
the apprentice’s error rate for the best two algo-
rithms, KStar and NNGE, in both scenarios. Al-
though Bayesian networks are widely used for these
kind of learning solutions, the tested algorithm (Naive
Bayes) presented a lower performance on the tested
Figure 2: Apprentice error rate for the tested scenarios.
scenarios.
Figure 2 shows that using fewer rules allows ap-
prentices to achievehigh accuracy rates with a smaller
number of observations. As another important find-
ing, on both scenarios, the accuracy rate stabilizes af-
ter achieving a certain value, which is lower in the
second scenario. For 100 observations, it is impossi-
ble to achieve full accuracy. Even though the appren-
tice is able to perform correctly in most of the cases,
under certain circumstances incorrect behaviours are
still being performed. Further research on this mat-
ter revealed that under these circumstances, the algo-
rithm’s confidence (the probability values of possible
behaviours) is quite low, meaning the algorithm’s de-
cision capacity is prone to errors.
One possible reason for the lack of a complete ac-
curacy after 100 observations may be the small range
of observed behaviours. Some of the environment
states presented to the apprentice may require the ex-
ecution of yet unobserved behaviours. This results in
the non inclusion of the correct behaviour in the algo-
rithm’s list of possibilities.
Figure 2 also shows that KStar performs a little
better than NNGE but, as we increase the number
of observations, the accuracy rate of the KSTAR de-
creases slightly. This decline may be due to the fact
that the KStar algorithm uses the similarities among
the train sequences to calculate the list of possible be-
haviours. When faced with sets of similar environ-
ment states that give rise to different behaviours, the
initial observations may lead to mistakes that are fixed
with subsequent observations.
Although only a small set of the learning algo-
rithm was focused on these tests, we can say that the
apprentice is able to learn almost all the expert’s be-
haviours in a small amount of time. When compared
with other learning techniques that need long training
periods such as reinforcement learning, results show
that learning by direct observation of agent actions al-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
280

lows software agents to achieveresults in a faster way.
Further tests proved that, in particular cases, ob-
serving agent actions is the only way to understand
expert behaviour. If behaviours produce no effects in
the environment(affecting only the agent and its inter-
nal state), relying on the changes in the environment
makes learning ineffective. Testing our learning ap-
proach in such a scenario produced similar results to
those presented on figure 2, were all behaviours pro-
duce visible effects in the environment. This proves
the apprentice was able to learn the expert’s behaviour
even though there were no visible effects. These re-
sults show us that learning by observation can be of
use to software agents.
5 CONCLUSIONS AND FUTURE
WORK
As shown by the experimental results on section 4,
the proposedlearning algorithm allows agents to learn
new skills within a small number of observations. As
opposed to reinforcement learning, apprentice agents
do not need to test all possibilities to determine the
correct behaviour for a given situation. Apprentices
are able to see expert’s behaviours, reducing the num-
ber of iterations necessary for the initial learning
stage.
After completing the memory approach, further
tests are needed to determine how it interacts with
learning and how it influences the algorithm’s per-
formance. The learning algorithm also needs to be
compared with other learning approaches in scenar-
ios where observation of expert actions is of key im-
portance. This will enable us to see how favourable
is learning by observation when compared with other
learning approaches.
ACKNOWLEDGEMENTS
This paper reports PhD research work, for the Doc-
toral Program on Information Science and Tech-
nology of ISCTE-Instituto Universitario de Lisboa.
It is partially supported by Fundac¸˜ao para a Cien-
cia e a Tecnologia through the PhD Grant number
SFRH/BD/44779/2008 and the Associated Labora-
tory number 12 - Instituto de Telecomunicac¸˜oes.
REFERENCES
Alpaydin, E. (2004). Introduction to machine learning.
MIT Press, Cambridge Mass.
Argall, B. D., Chernova, S., Veloso, M., and Browning, B.
(2009). A Survey of Robot Learning from Demon-
stration, volume Robotics and Autonomous Systems,
pages 469–483. Elsevier.
Bandura, A. (1977). Social learning theory. Prentice Hall.
Billard, A. and Dautenhahn, K. (1999). Experiments in
learning by imitation - grounding and use of commu-
nication in robotic agents.
Costa, P. and Botelho, L. (2011). Software image for
learning by observation. Proceedings of 15th Por-
tuguese Conference on Artificial Intelligence (EPIA
2011), pages 872–884.
Dautenhahn, K. (1994). Trying to imitate - a step towards
releasing robots from social isolation. Proceedings of
From perception to action conference, pages 290–301.
Demiris, J. and Hayes, G. (2002). Imitation as a dual-route
process featuring predictive and learning components.
a biologically plausible computational model. In
Dautenhahn, K. and Nehaniv, C., editors, Imitation
in animals and artifacts, pages 327–361. Cambridge,
MIT press edition.
di Pellegrino, G., Fadiga, L., Fogassi, L., Gallese, V.,
and Rizzolatti, G. (1992). Understanding motor
events: a neurophysiological study. Experimen-
tal brain research. Experimentelle Hirnforschung.
Exp´erimentation c´er´ebrale, 91(1):176–180.
Kerstin, T. Q., Dautenhahn, K., and Nehaniv, C. L. (1999).
The essence of embodiment: A framework for under-
standing and exploiting structural coupling between
system and environment.
Meunier, M., Monfardini, E., and Boussaoud, D. (2007).
Learning by observation in rhesus monkeys. Neuro-
biol Learn Mem, 88(2):243–8.
Milstein, M., Linick, S., Lonsdorf, E., and Ross, S. (2008).
A comparison between chimpanzee (pan troglodytes)
and gorilla (gorilla gorilla gorilla) social tolerance at
an artificial termite mound. AMERICAN JOURNAL
OF PRIMATOLOGY.
Mitchell, T. M. (1997). Machine Learning. McGraw-Hill,
New York.
Moore, B. (1992). Avian movement imitation and a new
form of mimicry: tracing the evolution of a complex
form of learning. Behaviour, 122:231–263.
Ramachandran, V. S. (2003). The emerging mind: the Reith
Lectures 2003. Profile Books.
Ramachandran, V. S. (2006). Mirror neurons and imitation
learning as the driving force behind ”the great leap
forward” in human evolution. Edge Foundation.
Rizzolatti, G., Fadiga, L., Gallese, V., and Fogassi, L.
(1996). Premotor cortex and the recognition of mo-
tor actions. Brain research. Cognitive brain research,
3(2):131–141.
LEARNING BY OBSERVATION IN SOFTWARE AGENTS
281
