
MUTUAL EXCLUSION IN CYBER-PHYSICAL SYSTEMS
Sumeet Gujrati and Gurdip Singh
Computing and Information Sciences, Kansas State University, Nichols 234, Manhattan, U.S.A.
Keywords:
Cyber-physical Systems, Resource Allocation, Mutual Exclusion.
Abstract:
Distributed computing problems such as mutual exclusion have been studied extensively for traditional dis-
tributed systems. In traditional systems, a strict layered approach is taken wherein a set of users (application
processes)
U1, . . . ,Un
is layered on top of a mutual exclusion algorithm with processes
P
1
, . . . , P
n
. User
Ui
interacts with process
P
i
to request access to resources which are modeled as tokens, and users rely entirely
on mutual exclusion algorithm to regulate access to the resources. In a cyber-physical system, users (physical
entities) may themselves possess capabilities such as sensing, observing and mobility using which they may also
attempt to locate physical resources such as wheelchairs. Thus, a mutual exclusion algorithm in a cyber-physical
system must contend with the behavior of users. This paper proposes a graph-based model for cyber-physical
systems which is used to describe mutual exclusion algorithm as well as user behavior. Based on this model,
we present several solutions for the mutual exclusion problem. We have also conducted an extensive simulation
study of our algorithms using OMNeT++ discrete event simulation system.
1 INTRODUCTION
Cyber-physical systems are often formed as a result
of existing physical systems being instrumented with
cyber-infrastructure with the intention of aiding tasks
which are being accomplished by traditional (perhaps
manual) techniques. For example, consider a health
care facility where users (
e.g.
, hospital staff) share
resources (
e.g.
, wheelchairs, IV pumps) located in dif-
ferent parts of the facility. This facility may be using
established traditional techniques to locate and share
resources (
e.g.
, depositing free resources at a central
or a set of known locations). However, for more ef-
ficient operation, the resources can be instrumented
with sensing devices to track their location and usage,
and the information made available to potential users.
(Wieland et al., 2007) describes a similar smart factory
environment where context data (location and usage)
regarding tools, machines, transport carts, and spare
parts is made available via RFID tags to aid in locating
the nearest tools/machines available to do a task. Sim-
ilar systems have been discussed in various contexts
such as locating empty spaces in parking lots (Chin-
rungrueng et al., 2007), room reservation in buildings
(Conner et al., 2004) and smart building operations
(Liu et al., 2010).
One central issue in many application scenarios
such as discussed above is the use of resources in an
exclusive manner. In this paper, we study the problem
of mutual exclusion in cyber-physical systems where
users need exclusive access to physical resources. In
a traditional distributed system (TDS), a mutual ex-
clusion algorithm is typically modeled as a set of pro-
cesses
P
1
, . . . , P
n
, where
P
i
executes on node
V
i
, and a
strict layered structure is used wherein user
Ui
inter-
acts with
P
i
to gain access to a resource. The access of
the resources in a TDS is completely regulated by the
mutual exclusion algorithm.
P
2
PhyA
1
PhyA
2
PhyA
3
P
3
P
1
U2
U1
R1
R2
Figure 1: Cyber-infrastructure superimposed on a physical
system.
In a cyber-physical system (CPS), the cyber- infras-
tructure may have been superimposed on an existing
physical system (Figure 1). In such cases, a distributed
algorithm may have to contend with direct interactions
between the users and the resources. This introduces
several aspects in the context of the mutual exclusion
problem which are not addressed in a TDS. First, the
users may not be passive entities – that is, in addi-
73
Gujrati S. and Singh G..
MUTUAL EXCLUSION IN CYBER-PHYSICAL SYSTEMS.
DOI: 10.5220/0003834800730079
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 73-79
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

tion to requesting the cyber-infrastructure to locate
resources, the users may actively look for resources
on their own. For example, in Figure 1, in addition
to asking
P
1
to locate a resource, if
U1
observes that
resource
R1
is available, it may acquire
R1
without
waiting for a response from
P
1
, Second, in a TDS, the
state of a resource is controlled by mutual exclusion
algorithm. In a CPS, however, the users may indepen-
dently observe and change the state of the resources.
This, for instance, may cause scenarios wherein a user,
say
P1
in Figure 1, may start using
R1
even though mu-
tual exclusion algorithm may think that it is free and
may reserve it for another user (as there may not be a
way to ”lock” a physical resource). Third, physical re-
sources may be mobile so that they may be acquired at
one location and released at another (
e.g.
, a wheelchair
may be freed at a different location). This is different
from the view taken in a TDS where a resource (
e.g.
,
abstracted as a token) is released by the user at the
same node where it was acquired.
We find that the aspects in a CPS discussed above
can have a significant impact on the design of mutual
exclusion algorithms. Several other problems such
as distributed algorithms for creating globals states
in intelligent construction sites (Rajamani and Julien,
2010), event ordering (Romer, 2003; Kaveti et al.,
2009) and termination detection (Bapat and Arora,
2008; Kurian et al., 2009) have been studied for CPSs.
Although existing research discussed above has ad-
dressed some aspects of interactions between cyber-
infrastructure and the users, the problem in the context
of mutual exclusion has not been addressed. The con-
tribution of this paper is three-fold:
•
We propose a model which views a CPS as a triple
=
(CyS, PhyS, Int)
, where
CyS
models the cyber-
infrastructure superimposed on physical system
modeled as
PhyS
, and
Int
captures the interac-
tions between them. We call
CyS
and
PhyS
cyber-
subsystem and physical-subsystem respectively.
•
We propose a set of algorithms based on the pro-
posed model for the mutual exclusion problem.
Each algorithm has two components, one describ-
ing the behavior of the users in
PhyS
and the other
describing the mutual exclusion algorithm (or cy-
ber algorithm) in
CyS
. Each combination of user
behavior and cyber algorithm yields a different
CPS algorithm.
•
We have conducted an extensive simulation study
of proposed algorithms using OMNeT++ (Varga,
2001) which simulates both user behavior and cy-
ber algorithm.
This paper is organized as follows. Section 2 dis-
cusses a model of TDSs and Section 3 presents the
extension for a CPS. Section 4 discusses solutions to
the mutual exclusion problem for CPSs. Section 5 dis-
cusses simulation and results, and Section 6 concludes
the paper.
2 TRADITIONAL DISTRIBUTED
SYSTEMS
A traditional distributed system (TDS) is modeled as
a graph
G
C
= (CE, E)
, where CE is a set of cyber en-
tities (computing platforms) and E is a set of edges (or
communication links)
E
i j
between two cyber entities
V
i
and
V
j
(Chandy and Lamport, 1985). Each
V ∈ CE
has a set of processes, denoted by
V.processes ∈ CP
,
running on it. Processes executing on cyber entities
communicate via the communication links to interact
with each other.
A mutual exclusion algorithm for a TDS typically
models a physical resource (
e.g.
, a printer) as an ab-
stract object and provides users with an interface with
functions to request, acquire and release a resource,
and ensures that at most one user is granted access
to a resource at a time. Mutual exclusion algorithms
have been studied extensively (Dijkstra, 1965; Dijk-
stra, 1971; Lynch, 1980; Reif and Spirakis, 1982) for
both shared memory and message passing systems. In
the more general k-mutual exclusion problem, at most
k processes are allowed to be in critical section at the
same time (Bulgannawar and Vaidya, 1995; Makki
et al., 1992; Srimani and Reddy, 1992; Walter et al.,
2001; Raymond, 1989).
In (Walter et al., 2001), a k-mutual exclusion al-
gorithm, which is referred to as the KRL algorithm,
was proposed for wireless ad hoc networks. As one
of our solutions is based on the KRL algorithm, we
discuss this algorithm in more detail in the follow-
ing. In the KRL algorithm, each node i maintains a
data structure
height
i
, which is a three-tuple
(h
1
, h
2
, i)
.
Edges are directed from higher height nodes to lower
height nodes based on lexicographic ordering. For
example, if
height
0
= (2, 3, 0)
and
height
1
= (2, 2, 1)
,
then
height
0
> height
1
and the edge will be directed
from node 0 to node 1. KRL algorithm maintains n
nodes and k tokens, where
k < n
. For all nodes i,
height
i
is initialized so that the directed edges form
a directed acyclic graph (DAG) such that every node
has a directed path to some token holder and every
token holder node i has at least one neighbor n such
that
height
n
> height
i
. When a user at node i wants to
enter the critical section, it makes a request which is
enqueued by
P
i
in its local queue
Q
i
. When
P
i
receives
a request from neighbor
P
j
and
height
j
> height
i
,
P
i
enqueues the request in
Q
i
. If
P
i
is a non-token holding
SENSORNETS 2012 - International Conference on Sensor Networks
74

node and Q
i
is empty when the request is received, P
i
sends a request to its neighbor with the lowest height.
Hence, requests propagate via lower height nodes to
the token holders. If
P
i
has (or receives) a token, it
dequeues the first request from
Q
i
. If this request is
from its own application process,
P
i
gives permission
to its application process; else, it sends the token to its
neighboring node whose request it just dequeued.
3 CYBER-PHYSICAL SYSTEMS
We model a CPS as a triple
(CyS, PhyS, Int)
.
CyS
is
defined in the same way as in a TDS. PhyS is defined
as a pair (
PE, G
P
), where PE is the set of physical
entities and
G
P
is a graph (
PA, RE
), where PA is a set
of physical areas and RE is the set of reachability edges.
An edge
R
i j
∈ RE
represents the fact that a physical
entity can move directly from area
PhA
i
to area
PhA
j
.
A reachability edge
R
i j
between
PhA
i
and
PhA
j
is
analogous to a communication link
E
i j
between two
cyber entities
V
i
and
V
j
. For example in Figure 1, since
there is a doorway connecting
PhA
1
and
PhA
2
, there is
a reachability edge between them. We further partition
PE into two sets, AE and RS, where AE is a set of
active entities and RS is a set of resources. Active
entities are the users of the system and can perform
actions on their own (
e.g.
, hospital staff) and may use
the resources (e.g., wheelchairs) in the set RS.
We model each area
PhA ∈ PA
by two abstract
variables, PhA.ae and PhA.rs, which denote the set
of active entities and set of resources respectively cur-
rently located in area PhA. Similarly, we model the
state of a resource
r ∈ RS
by a variable r.state, which is
either free or busy. We assume that these abstract vari-
ables are updated automatically based on the actions
of active entities. For instance, if
U ∈ PhA.ae
, and
U moves out of the area PhA, then the state variable
PhA.ae is automatically updated so that U is removed
from PhA.ae. Similarly, when U enters a new area, the
corresponding state variable is updated to include U.
We assume a similar update happens for PhA.rs when
resources are moved between areas.
3.1 Interaction between Entities
This section defines the possible actions by active enti-
ties and interactions between the cyber- and physical-
subsystems:
• Sensing.
If a cyber entity
V ∈ CE
has the capa-
bility of sensing the presence of physical entities in an
area
PhA
, then we model this by allowing processes in
V.processes
to read
PhA.ae
and
PhA.rs
. Furthermore,
we also allow these processes to read
r.state
for each
resource r ∈ PhA.rs.
• Actions Performed by an Active Entity.
We
use the following actions to describe the behavior of
an active entity U ∈ AE:
•
Move(PhA) is an action which represents U mov-
ing from its current physical area to another phys-
ical area
PhA ∈ PA
, and is possible only if there
exists a reachability edge from its current physical
area to PhA.
•
Observe() is an action which represents
U
observ-
ing physical objects within an observation radius
(
O
R
). If
O
R
of
U
located in
PhA ∈ PA
is 1, then
U can observe the status of PhA, i.e., U can read
PhA.ae and PhA.rs, and r.state for each resource
r ∈ PhA.rs
. In general, if
O
R
of U is
r
, then U
can observe the status of all areas reachable via at
most
r
hops in
G
P
. For implementation purposes,
Observe() returns the set of resources which U can
observe depending on its O
R
.
•
While the
Move
and
Observe
actions can help
U
locate resource on its own, it can also in-
teract with the cyber algorithm. We assume
that U can use the action Send request() to re-
quest the cyber-subsystem for a resource. When
the cyber-subsystem has located the resource, U
uses Receive(
path
) to receive a
path
from the
cyber-subsystem. Note that although the cyber-
subsystem uses the edges in
G
C
to communicate
and locate resources, the
path
delivered to the user
is a path in the graph
G
P
from the current location
of U to a location of the resource.
•
The action Acquire(rs) represents the attempt by U
to physically acquire a resource rs which results in
rs.state being set to busy.
•
Release(rs) is used to physically release a resource
rs which results in rs.state being set to free.
4 MUTUAL EXCLUSION IN A
CPS
In this section, we present mutual exclusion algorithms
for a CPS. Each algorithm has two components: (a)
the behavior of active entities describing their efforts
to locate resources and (b) a cyber algorithm.
4.1 Behavior of Active Entities
Behavior describes the steps followed by an active
entity to locate a resource with the help of Observe
MUTUAL EXCLUSION IN CYBER-PHYSICAL SYSTEMS
75

and Move actions. We consider the following possible
behaviors:
Behavior B
0
:
In this behavior, U searches for a re-
source without any help from the cyber-subsystem. At
each step, if U observes a free resource, it will attempt
to acquire it. If unsuccessful (note that another active
entity may attempt to acquire the same resource at
the same time), then it picks a random adjacent area
and moves to that area via the connecting reachability
edge.
Behavior B
1
:
This behavior represents the other ex-
treme wherein U sends a request message to the cyber-
subsystem and waits for a response; then it follows
the path received in the message. In this case, it will
always successfully acquire a resource in the target
area as the access is regulated solely by the cyber-
subsystem.
Behavior B
2
:
In this behavior, U sends a request mes-
sage to the cyber-subsystem and waits for a response.
Subsequently, it follows the path received in the mes-
sage. However, as it moves, it also observes each
intermediate PhA for a free resource; if available, it
will attempt to acquire it.
Behavior B
3
:
In
B
2
, after delivering a path to a re-
source
R1
to U, the cyber-subsystem may find that
another resource
R2
has been released subsequently
which may be closer to U.
B
3
is a variation of
B
2
wherein U can dynamically accept updated paths from
the cyber-subsystem while it is moving, and follows
these shorter paths.
We have identified some possible behaviors of ac-
tive entities above. Clearly, variations of these behav-
iors (including more complex ones which, for instance,
involve active entities cooperating to avoid conflicts)
can be defined in our proposed model. We have iden-
tified and studied one such cooperative behavior and
has shown that it can significantly reduce the time to
acquire a resource (Gujrati and Singh, 2011).
4.2 Cyber Algorithms
To accommodate the different behaviors (
B
1
,
B
2
, and
B
3
), we have developed both centralized and dis-
tributed cyber algorithms. The algorithms assume that
each
V
i
∈ CE
runs exactly one process denoted by
P
i
,
each physical area
PhA
i
is sensed by exactly one cyber
entity
V
i
and sensing ranges of cyber entities do not
overlap. This eliminates possibilities of two cyber enti-
ties sensing the same resource and a physical resource
not being sensed by any cyber entity. Due to space
limitations, we do not describe centralized algorithm
and certain details such as how cyber-subsystem re-
acts when a resource reserved for a user is acquired by
some other user.
In this paper, we have explored two distributed
strategies to solve mutual exclusion in CPS. The first
strategy, termed as KRL CPS, is a variation of the
KRL algorithm wherein we perform edge reversal only
when an active entity moves the resource to another
location. Thus, in the scenario in Figure 2(a), the
P
1
remains the sink node as long as there is a resource in
PhA
1
.
The second strategy, termed Shortest Path Re-
source Allocation (SPRA), disregards the existing path
information and creates paths on a on-demand basis.
SPRA maintains a set of trees called
SPTree
s. Each
SPTree
i
is rooted at
P
i
where
V
i
senses a free resource.
Each
P
i
maintains two variables,
ptrR
i
and
height
i
.
attr
i
is a tuple (
ptrR
i
, height
i
). Initially, for all
P
i
,
attr
i
= (
NULL, ∞
). Each
P
i
also maintains a set
Nbr Attr
i
which contains the most recent
attr
elements received
from the neighboring nodes.
Figure 2(b) shows an initial setup showing two
SPTree
s rooted at
P
1
and
P
9
. When a process makes a
request, the request is forwarded via the parent pointers
to the tree root. For example, when
U1
located in
PhA
3
makes a request,
P
3
will propagate the request to
P
1
.
On receiving this request,
P
1
sets
R1.state
to locked
and sends confirmation back to
P
3
via intermediate
child pointers. When
U1
receives the confirmation, it
has to move along the path to reach
PhA
1
.
SPTree
s
Algorithm 1: SPTree management.
update attr
i
in Nbr Attr
j
;
if (ptrR
j
= SELF or ptrR
i
= P
j
)
/* V
j
either senses at least one free resource
or P
i
points to P
j
itself. */
exit();
else
min height ← min(height
k
), attr
k
∈ Nbr Attr
j
;
if (height
j
≤ min height + 1)
/*height
j
is already minimum.*/
exit();
else
attr
j
← (P
k
, height
k
+ 1);
broadcast attr
j
;
are created and maintained as follows. As soon as
P
i
senses a free resource, it sets
attr
i
to (
SELF, 0
). When-
ever
attr
i
changes,
P
i
broadcasts the new value to its
neighbors. If
V
j
is neighbor of
V
i
, on receiving
attr
i
,
P
j
executes Algorithm 1 which first updates
Nbr Attr
j
,
and then updates
attr
j
if the value received from
P
i
provides a lower cost path to a free resource. When a
resource, say
R1
in
PhA
1
in Figure 2(b) is locked,
P
1
changes
attr
1
to (
NULL, ∞
), and sends this value to
its children (which are propagated further). Hence, all
SENSORNETS 2012 - International Conference on Sensor Networks
76

1 2 3
4 5 6
7 8 9
U1
U2
R1(free)
R2(free)
(a) KRL initial DAG.
1, S, 0 2, 1, 1 3, 2, 2
4, 1, 1 5, 6, 2 6, 9, 1
7, 4, 2 8, 9, 1 9, S, 0
U1
U2
R1(free)
R2(free)
(b) SPRA initial setup.
1, N, ∞
2, N, ∞ 3, N, ∞
4, N, ∞ 5, 6, 2 6, 9, 1
7, N, ∞ 8, 9, 1 9, S, 0
R1(locked)
U1
U2
R2(free)
(c) R1 is locked.
1, N, ∞ 2, N, ∞ 3, N, ∞
4, 5, 3 5, 6, 2 6, 9, 1
7, 8, 2 8, 9, 1 9, S, 0
R1
(busy)
U1
U2
R
2
(free)
(d)
P
7
discovers new path.
1, 2, 2 2, 3, 1 3, S, 0
4, 5, 3 5, 6, 2 6, 9, 1
7, 8, 2 8, 9, 1 9, S, 0
R1(free)
U1
U2
R
2
(free)
(e) U1 releases R1.
Figure 2: (a):
KRL
Algorithm, (b) to (d):
SPRA
Algorithm -
S = SELF
,
N = NULL
, triple at each node = (
P
i
,
ptrR
i
,
height
i
).
the nodes in the tree will set their
attr
to (
NULL, ∞
)
(shown in Figure 2(c)). Subsequently, these nodes
connect to trees on a on-demand basis. For example,
when
P
7
receives a request from
U2
,
P
7
will attempt to
rediscover a resource. It initiates a breadth first search.
The resulting
SPTree
s are shown in Figure 2(d). Fig-
ure 2(e) shows
SPTree
s after
U1
moves
R1
to
PhA
3
and releases it there.
5 SIMULATION AND RESULTS
We used the OMNeT++ Discrete Event Simulation
System (Varga, 2001) to simulate the algorithms.
MiXiM (Wessel et al., 2009), an extension of OM-
NeT++ to simulate wireless and mobile networks, pro-
vides detailed models of the lower layers of the pro-
tocol stack. Our simulation is built on top of MiXiM.
See (Gujrati and Singh, 2011) for detailed discussion
on node architecture in the simulation.
In the following discussion, active entity and re-
source will be referred to as person and wheelchair
respectively. We use AT to represent the Acquire Time,
which is the time elapsed from when a request is made
and a wheelchair is acquired, NM represents the to-
tal number of messages generated in the network per
request, and NH represents the number of physical
areas a person needs to move to get a wheelchair. AT,
NM and NH are averaged for 100 requests per per-
son. For the experiments, we fixed the time it takes
for a person to move from one area to an adjacent one
to 3 seconds, and assumed that each person uses a
wheelchair for a random amount of time between 20
and 30 seconds. Furthermore, we assume that cyber
entities sense the status of the physical area it is lo-
cated in every 100ms, and the default
O
R
is 1. We use
the
5
-tuple
< M, K, B
i
, N
P
, N
W
>
to represent a system
configuration having
N
P
persons and
N
W
wheelchairs
located in a grid of size
M ∗ K
(or
G
M∗K
) of physical
areas and all
N
P
persons following behavior
B
i
.
V
x,y
represent the cyber entity located in row
x
and column
y of the grid.
• Comparison of KRL CPS and SPRA.
In the first scenario of KRL CPS, which we call KRL-S,
a wheelchair is released at the same location where
it was acquired. KRL-D refers to a scenario in which
wheelchair is released at a random location (which
is more realistic). As shown in Figure 3, for config-
uration
< 8, 8, B
1
, 6, 3 >
, NH is 18.3 in KRL-D, and
12.4 in KRL-S. The difference is due to the fact that
when the wheelchair moves from its original location,
the edges are reversed (hence, a linear chain of parent
pointers will be created from its original location to
the new location). The corresponding
NH
for SPRA
is 8.3 with wheelchairs released at random locations.
As can be seen in Figure 3, as the
N
W
is increased
(with
N
P
kept constant), the difference between the
performances of the three algorithms reduce. This is
due to the fact that with more wheelchairs (e.g., 10
wheelchairs in a
G
8∗8
), the trees have smaller depths.
As NH is higher for KRL CPS as compared to SPRA
algorithm, one would expect AT also to be higher. Fig-
ure 4 shows the performance of these algorithms with
respect to AT. As can be seen, SPRA outperforms both
KRL-D and KRL-S. We also simulated similar configu-
rations with
G
12∗12
and the results follow a similar pat-
tern. However, the performance gain for SPRA comes
at the expense of increased number of messages. To re-
create paths on demand, we have to conduct a breadth
first search when a wheelchair is requested. Whereas
NM is 31 for KRL-S and 47 for KRL-D, it is 93 for
SPRA for configuration
< 8, 8, B
1
, 6, 3 >
. However, as
N
W
is increased (keeping
N
P
fixed), we find that the
cost of re-creating paths drops as it is more likely that
nearby resources can be found (and hence, the breadth
first search terminates in relatively fewer number of
hops). Our simulation show that
NM
drops from 93 to
61 as N
W
is increased from 3 to 6.
0
2
4
6
8
10
12
14
16
18
20
3
4
5
6
7
8
9
10
NH
N
W
KRL-D
KRL-S
SPRA
Figure 3: NH vs N
W
for < 8, 8, B
1
, 6, N
W
>, 3 ≤ N
W
≤ 10.
MUTUAL EXCLUSION IN CYBER-PHYSICAL SYSTEMS
77
20
30
40
50
60
70
80
90
100
110
120
2
3
4
5
6
7
AT (sec)
N
P
KRL-D
KRL-S
SPRA
Figure 4: AT vs N
P
for < 8, 8, B
1
, N
P
, 3 >, 3 ≤ N
P
≤ 7.
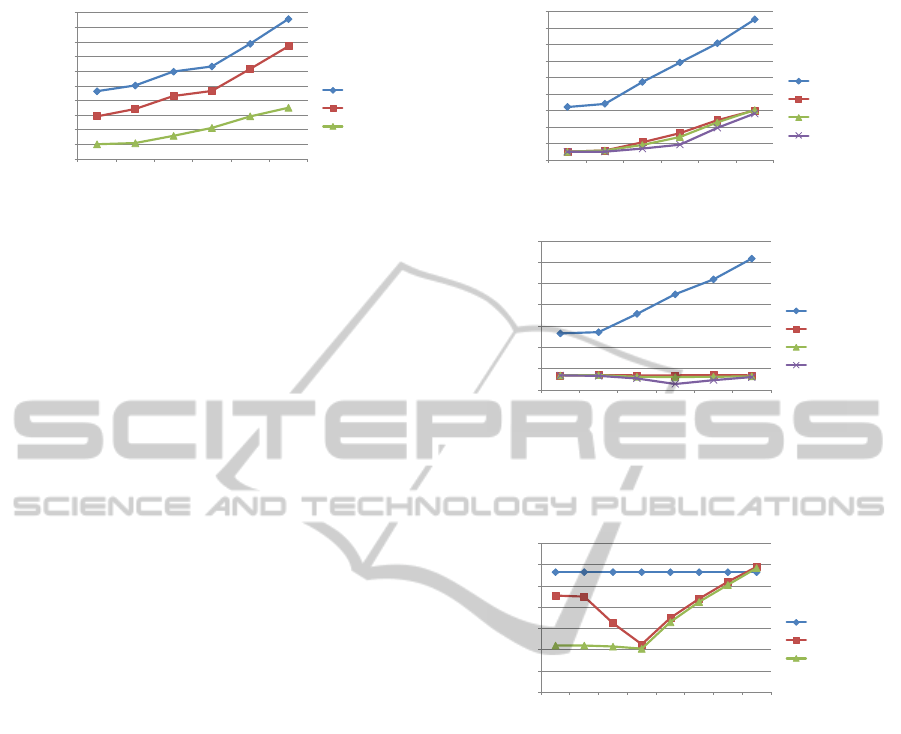
• Comparison of Different Behaviors.
Next, we wanted to analyze the impact of different
behaviors of active entities on AT and
NH
. In what
follows, SPRA-N denotes SPRA algorithm for behav-
ior
B
N
where
1 ≤ N ≤ 3
. We first studied the impact
of releasing wheelchairs in random areas on
AT
and
NH
by keeping
N
W
constant and varying
N
P
. The re-
sults are shown in Figure 5. As discussed earlier, in
B
0
(referred to as NoCS in Figure 5(a)), a person attempts
to visit areas on its own (without help of the cyber-
subsystem). This results in a high value of AT. For
the other three behaviors, we observed the following:
When
N
P
is 7 and
N
W
is 3, there is increased competi-
tion for wheelchairs. As a result, it is less likely that a
person will locate another free wheelchair when it is
moving to the location of the free wheelchair initially
identified by the cyber-subsystem (which it tries to
do in
B
2
and
B
3
). Similarly, it is less likely that the
cyber-subsystem will be able to provide an updated
path. Hence, the performance of the three behaviors
coincide for this scenario. As the number of persons is
decreased (from 7 to 5), there is less competition and
the scenarios wherein free wheelchairs can be located
by the person or the cyber-subsystem become more
probable, and SPRA-3 outperforms SPRA-2, which in
turn outperforms SPRA-1. As
N
P
is further decreased
(say to 2), we find that a free resource will always be
available and hence, the initial location identified by
the cyber- subsystem is most likely to be the nearest
one. Hence, the performances again converge. The
impact on NH is similar (see Figure 5(b)).
• Impact of O
R
.
In this setup, we increased
O
R
of each person from 1
to 8 for configurations
< 8, 8, B
i
, 5, 3 >
,
1 ≤ i ≤ 3
. The
results for SPRA are shown in Figure 6. The perfor-
mance of
B
1
is not impacted by
O
R
. The performance
of
B
2
improves as
O
R
is increased from 1 to 4 – this is
due to the fact that a person can observe more areas and
hence the chances of finding a nearby free wheelchairs
increase. However, as
O
R
is increased further, perfor-
mances of
B
2
starts degrading because the observation
zones of the users overlap a lot. Hence, there are
more chances that whenever a wheelchair becomes
free, multiple users might observe it and deviate from
25
35
45
55
65
75
85
95
105
115
2
3
4
5
6
7
AT (sec)
N
P
NoCS
SPRA-1
SPRA-2
SPRA-3
(a) AT vs N
P
.
5
10
15
20
25
30
35
40
2
3
4
5
6
7
NH
N
P
NoCS
SPRA-1
SPRA-2
SPRA-3
(b) NH vs N
P
.
Figure 5: Impact of varying
N
P
on
AT
and
NH
when
N
W
= 3
for G
8∗8
.
30
32
34
36
38
40
42
44
1
2
3
4
5
6
7
8
AT (sec)
O
R
SPRA-1
SPRA-2
SPRA-3
Figure 6: Impact of increasing O
R
on AT .
their original paths towards this free wheelchair. Since
only one of them will be successful, others will have to
incur additional hops. The performance of
B
3
show a
similar pattern except that when
O
R
is increased from
1 to 4, we do not see much change. In this case, we
find that the cyber-subsystem is able to provide quick
updates of newly freed wheelchairs which are close.
6 CONCLUSIONS AND FUTURE
WORK
Graph based models with various assumptions related
to message transmission and processing times have
provided a strong foundation to study distributed algo-
rithms in a TDS. This paper provides a step towards
studying similar algorithms for CPSs. We presented a
graph based formalism to model both the cyber- and
the physical-subsystems and the interactions between
them. Based on this model, we presented algorithms
SENSORNETS 2012 - International Conference on Sensor Networks
78

for the mutual exclusion problem. Each algorithm had
two components, one describing the behavior of users
in the physical-subsystem and the other describing the
cyber algorithm. We identified several characteristic
of a CPS which make solutions for TDS inapplicable
to a CPS. We simulated all the presented algorithms
using OMNeT++. The results provide suggestions on
the best algorithm to use in different scenarios. For
example, the results show that when fewer resources
are present, it might be best to rely completely on
the cyber-subsystem; otherwise, participation of users
in locating resource can improve performance. The
model proposed in this paper opens the possibility of
studying more complex scenarios and algorithms for
CPSs. These possibilities include associating proper-
ties with the reachability edges in
G
P
and cooperation
between the users in locating resources. Finally, in the
SPRA
algorithm, identifying mechanisms via which
existing tree information could be utilized in creating
on-demand paths to reduce number of messages is a
subject of future research.
ACKNOWLEDGEMENTS
This work was supported in part by NSF Grant
0615337 and K-State Targeted Excellence program.
REFERENCES
Bapat, S. and Arora, A. (2008). Message efficient termina-
tion detection in wireless sensor networks. In Proceed-
ings of the 2008 INFOCOM Workshops.
Bulgannawar, S. and Vaidya, N. (1995). A distributed k-
mutual exclusion algorithm. In Proceedings of the 15th
International Conference on Distributed Computing
Systems, pages 153–160.
Chandy, K. M. and Lamport, L. (1985). Distributed snap-
shots: Determining global states of distributed systems.
ACM Transactions on Computer Systems, 3(1).
Chinrungrueng, J., Sunantachaikul, U., and Triamlumlerd,
S. (2007). Smart parking: an application of optical-
wireless sensor network. In Proceedings of the 2007
International Symposium on Applications and the In-
ternet Workshops.
Conner, W. S., Heidemann, J., Krishnamurthy, L., Wang,
X., and Yarvis, M. (2004). Workplace applications of
sensor networks. In USC/ISI Technical Report ISI-TR-
2004-591.
Dijkstra, E. (1965). Solution of a problem in concurrent
programming control. Communications of the ACM.
Dijkstra, E. (1971). Hierarchical ordering of sequential
processes. Acta Informatica, 1:115–138.
Gujrati, S. and Singh, G. (2011). Mutual exclusion in cyber-
physical systems. Technical report, Kansas State Uni-
versity CIS TR 2011-2.
Kaveti, L., Pulluri, S., and Singh, G. (2009). Event ordering
in pervasive sensor networks. In 5th IEEE Interna-
tional Workshop on Sensor Networks and Systems for
Pervasive Computing.
Kurian, H., Rakshit, A., and Singh, G. (2009). Detecting
termination in pervasive sensor networks. In 9th IEEE
International Symposium on Asynchronous Decentral-
ized Systems.
Liu, M., Mihaylov, S. R., Bao, Z., Jacob, M., Ives, Z. G.,
Loo, B. T., and Guha, S. (2010). Smartcis: Integrating
digital and physical environments. SIGMOD Record.
Lynch, N. (1980). Fast allocation of nearby resources in a
distributed system. In Proceedings of the 12th Annual
ACM Symposium on Theory of Computing, pages 70–
81.
Makki, K., Banta, P., Been, K., Pissinou, N., and Park, E.
(1992). A token based distributed k mutual exclusion
algorithm. In IEEE Proceedings of the Symposium on
Parallel and Distributed Processing, pages 408–411.
Rajamani, V. and Julien, C. (2010). Blurring snapshots:
Temporal inference of missing and uncertain data. In
Proceedings of the IEEE International Conference on
Pervasive Computing and Communications.
Raymond, K. (1989). A distributed algorithm for multiple
entries to a critical section. In Information Processing
Letters, volume 30, pages 189–193.
Reif, J. H. and Spirakis, P. (1982). Real time resource al-
location in distributed systems. In Proceedings of
ACM SIGACT-SIGOPS Symposium on Principles of
Distributed Computing, pages 84–94.
Romer, K. (2003). Temporal message ordering in wireless
sensor networks. In Annual Mediterranean Ad Hoc
Networking Workshop.
Srimani, P. and Reddy, R. (1992). Another distributed al-
gorithm for multiple entries to a critical section. In
Information Processing Letters, volume 41, pages 51–
57.
Varga, A. (2001). The omnet++ discrete event simulation
system. In Proceedings of the European Simulation
Multiconference (ESM 2001).
Walter, J., Cao, G., and Mohanty, M. (2001). A k-mutual
exclusion algorithm for wireless ad hoc networks. In
Proceedings of the First Annual Workshop on Princi-
ples of Mobile Computing.
Wessel, K., Swigulski, M., , Kpke, A., and Willkomm, D.
(2009). Mixim: the physical layer an architecture
overview. In Proceedings of the 2nd International
Conference on Simulation Tools and Techniques.
Wieland, M., Kopp1, O., Nicklas, D., and Leymann, F.
(2007). Towards context-aware workflows. In Pro-
ceedings of the CAISE07 Workshops and Doctoral
Consortium.
MUTUAL EXCLUSION IN CYBER-PHYSICAL SYSTEMS
79
